Win10系统有几种复制文件的命令,哪种最强大?
环境:
Win10 专业版
问题描述:
Win10系统有几种复制文件的命令,哪种最强大?
解决方案:
在 Windows 10 中,复制文件的命令有以下几种:
- 使用 xcopy 命令:xcopy 是一个功能强大的文件复制命令,它能够快速复制文件和目录,并且支持复制整个驱动器。要使用 xcopy 命令复制文件,您需要在命令提示符中输入以下命令:
xcopy source_file destination_file
其中,source_file 是要复制的文件的路径,destination_file 是要将文件复制到的位置。
- 使用 copy 命令:copy 命令是 Windows 中最基本的文件复制命令,它可以复制文件和目录。要使用 copy 命令复制文件,您需要在命令提示符中输入以下命令:
copy source_file destination_file
其中,source_file 是要复制的文件的路径,destination_file 是要将文件复制到的位置。
- 使用 robocopy 命令:robocopy 是一个自动化的文件复制命令,它能够复制文件和目录,并且支持复制整个驱动器。要使用 robocopy 命令复制文件,您需要在命令提示符中输入以下命令:
robocopy source_file destination_file
其中,source_file 是要复制的文件的路径,destination_file 是要将文件复制到的位置。
以上就是在 Windows 10 中复制文件的命令,您可以根据自己的需要选择合适的命令来复制文件
其中,robocopy 是最强大的复制文件命令,因为它具有以下特点:
支持断点续传:如果复制过程中出现错误,可以从中断的地方继续复制,而无需重新开始。
支持多线程复制:可以同时复制多个文件,提高复制速度。
支持复制文件夹:不仅可以复制单个文件,还可以复制整个文件夹及其子文件夹。
支持复制隐藏文件:可以复制隐藏文件和系统文件,而无需手动显示它们。
因此,如果您需要复制文件或文件夹,建议使用 robocopy 命令
robocopy 复制超大文件如何提高复制速度
robocopy 是 Windows 系统自带的一个高级文件复制工具,相较于普通的 copy 命令,robocopy 可以提高复制速度,同时支持断点续传、复制文件夹以及复制隐藏文件等特性。如果您想要使用 robocopy 复制超大文件,可以按照以下步骤进行操作:
-
打开命令提示符:按下
Win + R键,输入cmd并按回车键。 -
切换到要复制的文件所在的文件夹:在命令提示符中输入
cd命令,然后跟上传输要复制的文件所在的文件夹路径,例如:cd C:\Users\UserName\Documents。 -
使用
robocopy命令复制文件:在命令提示符中输入robocopy source_file.ext destination_file.ext,其中source_file.ext是源文件的路径和文件名,destination_file.ext是目标文件的路径和文件名。 -
查看复制进度:在命令提示符中输入
robocopy /?,可以看到robocopy命令的详细用法。其中有一个选项是/progress,可以用来显示复制进度。例如:robocopy source_file.ext destination_file.ext /progress。 -
提高复制速度:
robocopy默认使用的是并行复制方式,这已经可以大大提高复制速度。此外,还可以通过调整robocopy命令中的参数来进一步提高复制速度。例如,可以使用/b参数来启用多线程复制,使用/w参数来禁用窗口刷新。具体的参数说明可以在命令提示符中输入robocopy /?来查看。
请注意,如果目标文件夹路径中包含空格或其他特殊字符,需要将文件路径用引号括起来。例如:robocopy "C:\Users\UserName\Documents\source_file.ext" "D:\Destination\destination_file.ext"。
C:\Users\Administrator>robocopy /?-------------------------------------------------------------------------------ROBOCOPY :: Windows 的可靠文件复制
-------------------------------------------------------------------------------开始时间: 2023年10月31日, 星期二 14:20:05用法 :: ROBOCOPY source destination [file [file]...] [options]源 :: 源目录(驱动器:\路径或\\服务器\共享\路径)。目标 :: 目标目录(驱动器:\路径或\\服务器\共享\路径)。文件 :: 要复制的文件(名称/通配符: 默认为 "*.*")。::
:: 复制选项:
::/S :: 复制子目录,但不复制空的子目录。/E :: 复制子目录,包括空的子目录。/LEV:n :: 仅复制源目录树的前 n 层。/Z :: 在可重新启动模式下复制文件。/B :: 在备份模式下复制文件。/ZB :: 使用可重新启动模式;如果拒绝访问,请使用备份模式。/J :: 复制时使用未缓冲的 I/O (推荐在复制大文件时使用)。/EFSRAW :: 在 EFS RAW 模式下复制所有加密的文件。/COPY:复制标记:: 要复制的文件内容(默认为 /COPY:DAT)。(copyflag: D=数据,A=属性,T=时间戳,X=跳过替换数据流)。(S=安全=NTFS ACL,O=所有者信息,U=审核信息)。/SEC :: 复制具有安全性的文件(等同于 /COPY:DATS)。/COPYALL :: 复制所有文件信息(等同于 /COPY:DATSOU)。/NOCOPY :: 不复制任何文件信息(与 /PURGE 一起使用)。/SECFIX :: 修复所有文件的文件安全性,即使是跳过的文件。/TIMFIX :: 修复所有文件的文件时间,即使是跳过的文件。/PURGE :: 删除源中不再存在的目标文件/目录。/MIR :: 镜像目录树(等同于 /E 加 /PURGE)。/MOV :: 移动文件(复制后从源中删除)。/MOVE :: 移动文件和目录(复制后从源中删除)。/A+:[RASHCNET] :: 将给定的属性添加到复制的文件。/A-:[RASHCNET] :: 从复制的文件中删除给定的属性。/CREATE :: 仅创建目录树和长度为零的文件。/FAT :: 仅使用 8.3 FAT 文件名创建目标文件。/256 :: 关闭超长路径(> 256 个字符)支持。/MON:n :: 监视源;发现多于 n 个更改时再次运行。/MOT:m :: 监视源;如果更改,在 m 分钟时间后再次运行。/RH:hhmm-hhmm :: 可以启动新的复制时运行的小时数 - 时间。/PF :: 基于每个文件(而不是每个步骤)来检查运行小时数。/IPG:n :: 程序包间的间距(ms),以释放低速线路上的带宽。/SJ:: 将接合复制为接合而非接合目标。/SL:: 将符号链接复制为链接而非链接目标。/MT[:n] :: 使用 n 个线程进行多线程复制(默认值为 8)。n 必须至少为 1,但不得大于 128。该选项与 /IPG 和 /EFSRAW 选项不兼容。使用 /LOG 选项重定向输出以便获得最佳性能。/DCOPY:复制标记:: 要复制的目录内容(默认为 /DCOPY:DA)。(copyflag: D=数据,A=属性,T=时间戳,E=EA,X=跳过替换数据流)。/NODCOPY :: 不复制任何目录信息(默认情况下,执行 /DCOPY:DA)。/NOOFFLOAD :: 在不使用 Windows 复制卸载机制的情况下复制文件。/COMPRESS :: 在文件传输期间请求网络压缩(如果适用)。::
:: 文件选择选项:
::/A :: 仅复制具有存档属性集的文件。/M :: 仅复制具有存档属性的文件并重置存档属性。/IA:[RASHCNETO] :: 仅包含具有任意给定属性集的文件。/XA:[RASHCNETO] :: 排除具有任意给定属性集的文件。/XF 文件[文件]... :: 排除与给定名称/路径/通配符匹配的文件。/XD 目录[目录]... :: 排除与给定名称/路径匹配的目录。/XC :: 排除已更改的文件。/XN :: 排除较新的文件。/XO :: 排除较旧的文件。/XX :: 排除多余的文件和目录。/XL :: 排除孤立的文件和目录。/IS :: 包含相同文件。/IT :: 包含已调整的文件。/MAX:n :: 最大的文件大小 - 排除大于 n 字节的文件。/MIN:n :: 最小的文件大小 - 排除小于 n 字节的文件。/MAXAGE:n :: 最长的文件存在时间 - 排除早于 n 天/日期的文件。/MINAGE:n :: 最短的文件存在时间 - 排除晚于 n 天/日期的文件。/MAXLAD:n :: 最大的最后访问日期 - 排除自 n 以来未使用的文件。/MINLAD:n :: 最小的最后访问日期 - 排除自 n 以来使用的文件。(If n < 1900 then n = n days, else n = YYYYMMDD date)。/FFT :: 假设 FAT 文件时间(2 秒粒度)。/DST :: 弥补 1 小时的 DST 时间差。/XJ:: 排除(文件和目录的)符号链接和接合点。/XJD:: 排除目录和接合点的符号链接。/XJF :: 排除文件的符号链接。/IM :: 包含已修改的文件(更改时间不同)。
::
:: 重试选项:
::/R:n :: 失败副本的重试次数: 默认为 1 百万。/W:n :: 两次重试间的等待时间: 默认为 30 秒。/REG :: 将注册表中的 /R:n 和 /W:n 保存为默认设置。/TBD :: 等待定义共享名称(重试错误 67)。/LFSM :: 在低可用空间模式下运行,启用复制暂停和继续(参见“备注”)。/LFSM:n[KMG] :: /LFSM,指定下限大小(以 n [K:kilo、M:mega、G:giga] 字节为单位)。::
:: 日志记录选项:
::/L :: 仅列出 - 不复制、添加时间戳或删除任何文件。/X :: 报告所有多余的文件,而不只是选中的文件。/V :: 生成详细输出,同时显示跳过的文件。/TS :: 在输出中包含源文件的时间戳。/FP :: 在输出中包含文件的完整路径名称。/BYTES :: 以字节打印大小。/NS :: 无大小 - 不记录文件大小。/NC :: 无类别 - 不记录文件类别。/NFL :: 无文件列表 - 不记录文件名。/NDL :: 无目录列表 - 不记录目录名称。/NP :: 无进度 - 不显示已复制的百分比。/ETA :: 显示复制文件的预期到达时间。/LOG:文件 :: 将状态输出到日志文件(覆盖现有日志)。/LOG+:文件 :: 将状态输出到日志文件(附加到现有日志中)。/UNILOG:文件 :: 以 UNICODE 方式将状态输出到日志文件(覆盖现有日志)。/UNILOG+:文件 :: 以 UNICODE 方式将状态输出到日志文件(附加到现有日志中)。/TEE :: 输出到控制台窗口和日志文件。/NJH :: 没有作业标头。/NJS :: 没有作业摘要。/UNICODE :: 以 UNICODE 方式输出状态。::
:: 作业选项 :
::/JOB:作业名称 :: 从命名的作业文件中提取参数。/SAVE:作业名称 :: 将参数保存到命名的作业文件/QUIT :: 处理命令行后退出(以查看参数)。/NOSD :: 未指定源目录。/NODD :: 未指定目标目录。/IF :: 包含以下文件。::
:: 备注:
::以前在卷的根目录上使用 /PURGE 或 /MIR 导致robocopy 也对“系统卷信息”目录内的文件应用所请求的操作。现在不再是这种情形;如果指定了任何一项,则 robocopy 将跳过复制会话简要源目录和目标目录中具有该名称的任何文件或目录。已修改的文件分类仅在源和目标文件系统支持更改时间戳(例如 NTFS)以及源和目标文件具有不同的更改时间(否则相同)时才适用。默认情况下不复制这些文件;指定 /IM以包含它们。/DCOPY:E 标志请求扩展属性复制应该针对目录进行尝试。请注意,如果目录的 EA 无法复制,则当前 robocopy 将继续。/COPYALL 中也未包括在 /COPYALL 中。使用 /LFSM 请求 robocopy 在“低可用空间模式”下运行。在该模式下,每当文件副本导致目标卷的可用空间低于可以由 LFSM:n[KMG] 形式的标志明确指定的“下限”值时,robocopy 将会暂停。如果指定了 /LFSM,但没有显式下限值,则会将下限设置为目标卷大小的 10%。低可用空间模式与 /MT、/EFSRAW、/B 和/ZB 不兼容。
相关文章:

Win10系统有几种复制文件的命令,哪种最强大?
环境: Win10 专业版 问题描述: Win10系统有几种复制文件的命令,哪种最强大? 解决方案: 在 Windows 10 中,复制文件的命令有以下几种: 使用 xcopy 命令:xcopy 是一个功能强大的…...

力扣202.快乐数
原题链接:202.快乐数 要记住的就是,需要判断元素是否出现过,或者是否在集合里存在,就可以考虑用哈希法去做 因为是每一位都进行平方后相加得到新的数,所以需要单独写一个函数进行每位相加的运算得到最终的sum 不断重…...
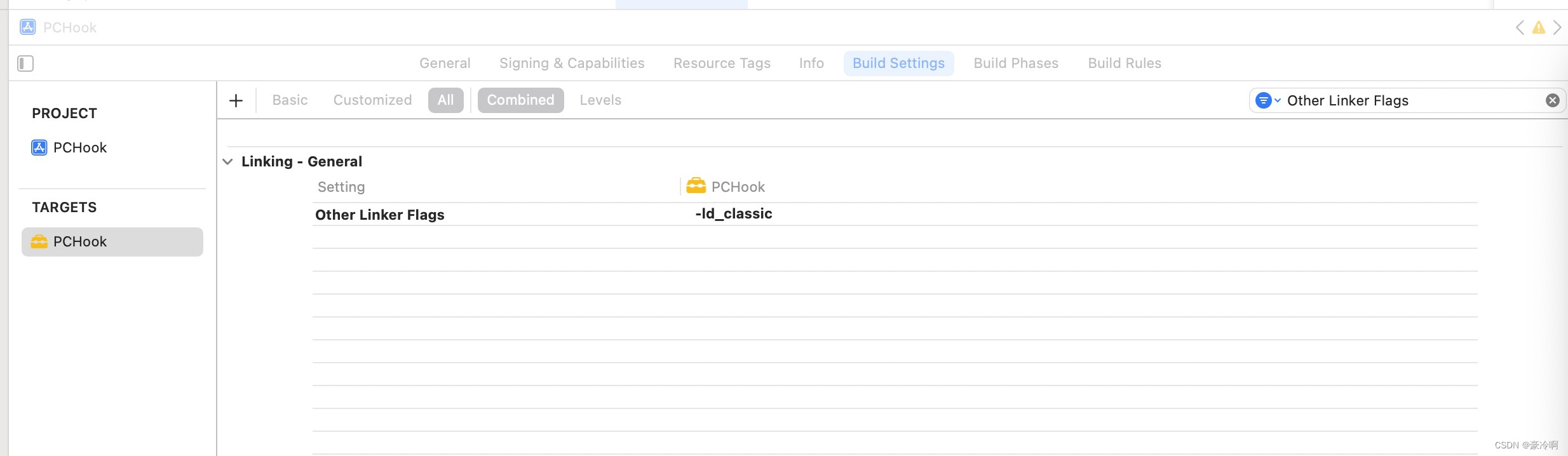
iOS Xcode15 适配:Other Linker Flags:-ld_classic
0x00 适配是一条没有尽头的路 Xcode 14 毛问题都没有,Xcode 15 崩溃 看图说话 0x01 解决方案 Other Linker Flags 添加 -ld_classic 即可 0x02 我的小作品 欢迎体验我的作品之一:小挑战-XGame 拼图游戏,渐变色游戏,经典24点游…...
)
springboot苍穹外卖实战:六、redis(Spring Data Redis)
Spring Data Redis 简介 网址:https://spring.io/projects/spring-data-redis Spring Data Redis中提供了一个高度封装的类:RedisTemplate,对相关api进行了归类封装,将同一类型操作封装为operation接口,具体分类如下࿱…...
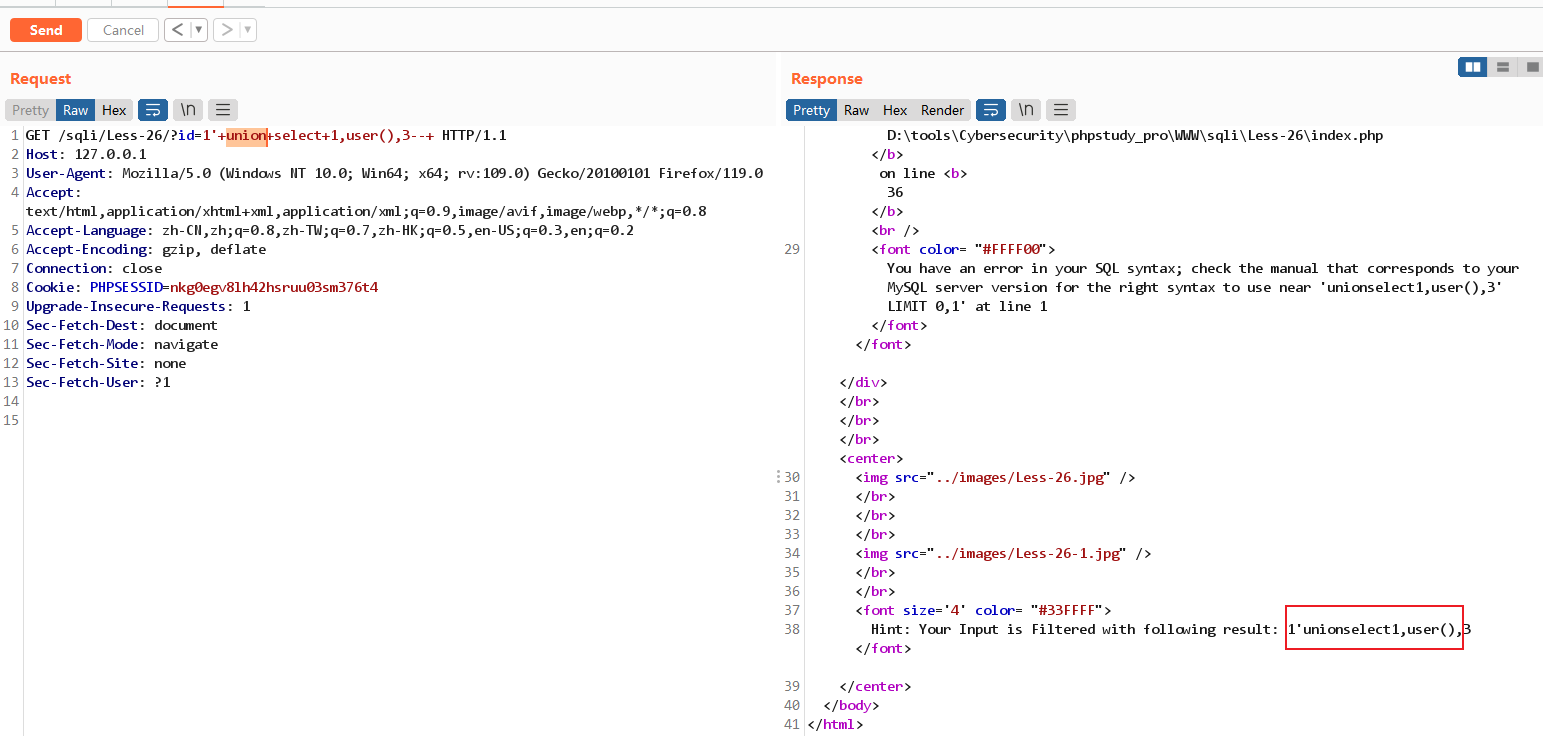
sqli 靶场 Level23-Level30 wp
level-23 (注释被过滤) 抓包,查看正常请求和响应。 略 尝试是否存在注入 id1’,id1’,成周期性变化 尝试 POC POC: id1andextractValue(1,concat(0x7e,user()))-- 结果:failed。怀疑–被过滤掉了,尝试…...

《完蛋!我被美女包围了》突然火了!世界首个开源贡献榜出炉丨 RTE 开发者日报 Vol.75
开发者朋友们大家好: 这里是 「RTE 开发者日报」 ,每天和大家一起看新闻、聊八卦。我们的社区编辑团队会整理分享 RTE (Real Time Engagement) 领域内「有话题的 新闻 」、「有态度的 观点 」、「有意思的 数据 」、「有思考的 文…...

C++ Qt 学习(一):Qt 入门
Qt6 安装教程 0. 基础知识 0.1 qmake 和 cmake 对比 qmake:qt 独有的代码构建工具cmake:C 通用的代码构建工具,绝大部分 C 开源项目都使用 cmake 管理代码qt 项目,没有特殊要求,使用 qmake 即可 0.2 Qt 3 个窗口类的…...

高性能消息中间件 - Kafka3.x(三)
文章目录 高性能消息中间件 - Kafka3.x(三)Kafka Broker ⭐Kafka Broker概念Zookeeper(新版本可以不使用zk了)⭐Zookeeper的作用 Kafka的选举1:Broker选举Leader⭐Broker核心参数⭐案例:服役新节点和退役旧…...

【八】Linux成神之路
Linux成神之路 简介:最近梳理了一下自己linux系统的学习历程,感觉整个成长过程就很顺利,并没有走弯路,于是想着可以不可以把自己linux系统学习的路线记录下来,能够在大家成长的路上有一点帮助,就在这样的一…...

功能测试用例,需要详细到什么程度?
📢专注于分享软件测试干货内容,欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正!📢交流讨论:欢迎加入我们一起学习!📢资源分享:耗时200小时精选的「软件测试」资…...
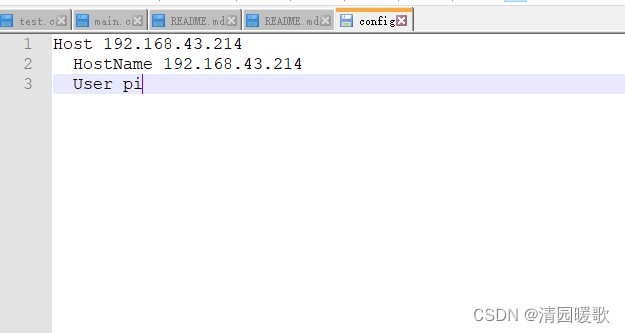
VScode远程连接错误:进程试图写入不存在的管道
使用VScode连接树莓派时,出现远程连接错误:进程试图写入不存在的管道 解决方案: (1)可以进入config所在文件夹,删除文件 (2)无法解决的化尝试下述方法 输入 Remotting-SSH:Settin…...
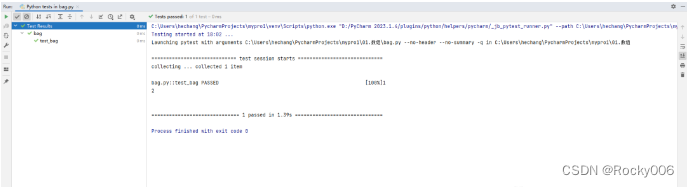
Python测试之Pytest详解
概要 当涉及到python的测试框架时,pytest是一个功能强大且广泛应用的第三方库。它提供简洁而灵活的方式来编写和执行测试用例,并具有广泛的应用场景。下面是pytest的介绍和详细使用说明: pytest是一个用于python单元测试的框架,它…...

uni-app微信小程序打开第三方地图
需求 小程序中有个按钮点击以后会调用手机中第三方地图进行导航。参数 位置信息 经度 与纬度。 实现方法 uni.openLocation({latitude: Number(地址纬度),longitude: Number(地址经度),name: 地址名称,address: 地址详情,success: function (res) {console.log(打开系统位置地…...

Android NDK开发详解之NDK 使用入门
Android NDK开发详解之NDK 使用入门 下载 NDK 和工具创建或导入原生项目 原生开发套件 (NDK) 是一套工具,使您能够在 Android 应用中使用 C 和 C 代码,并提供众多平台库,您可使用这些平台库管理原生 activity 和访问实体设备组件,…...

nmap指纹识别要点以及又快又准之方法
nmap指纹识别要点以及又快又准之方法 一. 前言:二. nmap识别实验:一. 实验一:IP配置:空间配置:扫描结果:详细输出二. 实验二:IP配置:空间配置:扫描结果:详细输出三. 实验三:IP配置:空间配置:扫描结果:详细输出四. 实验四:IP...
Rust编程基础之6大数据类型
1.Rust数据类型 在 Rust 中, 每一个值都属于某一个 数据类型(data type), 这告诉 Rust 它被指定为何种数据,以便明确数据处理方式。我们将看到两类数据类型子集:标量(scalar)和复合(compound&a…...

06 MIT线性代数-线性无关,基和维数Independence, basis, and dimension
1. 线性无关 Independence Suppose A is m by n with m<n (more unknowns than equations) Then there are nonzero solutions to Ax0 Reason: there will be free variables! A中具有至少一个自由变量,那么Ax0一定具有非零解。A的列向量可以线性组合得到零向…...
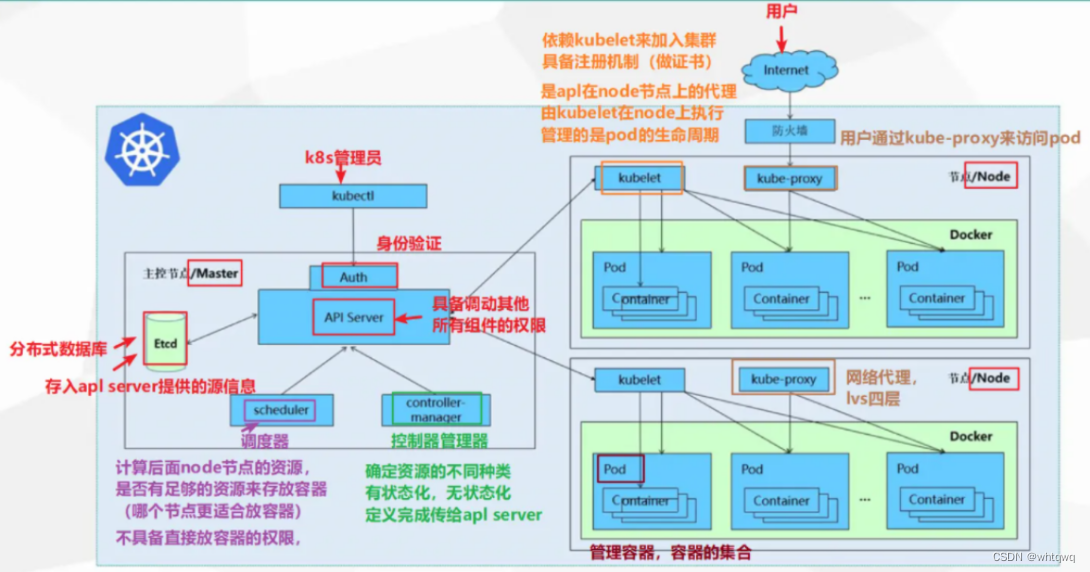
Kubernetes 概述以及Kubernetes 集群架构与组件
目录 Kubernetes概述 K8S 是什么 为什么要用 K8S K8S 的特性 Kubernetes 集群架构与组件 核心组件 Master 组件 Node 组件 编辑 Kubernetes 核心概念 常见的K8S按照部署方式 Kubernetes概述 K8S 是什么 K8S 的全称为 Kubernetes,Kubernetes 是一个可移植、可扩…...

GZ035 5G组网与运维赛题第9套
2023年全国职业院校技能大赛 GZ035 5G组网与运维赛项(高职组) 赛题第9套 一、竞赛须知 1.竞赛内容分布 竞赛模块1--5G公共网络规划部署与开通(35分) 子任务1:5G公共网络部署与调试(15分) 子…...

使用Jasypt3.0.3版本对SpringBoot配置文件加密
时间 2023-11-01 使用Jasypt3.0.3版本对SpringBoot配置文件加密 目录 引入依赖使用密钥生成密文配置yml验证是否自动解密 引入依赖 <!--yml 文件加解密--><dependency><groupId>com.github.ulisesbocchio</groupId><artifactId>jasypt-spring-b…...

机器学习模型评估中的构念效度:超越基准测试分数的科学推断
1. 项目概述与核心问题在机器学习的日常研究和工程实践中,我们每天都在和各种各样的基准测试(Benchmark)打交道。无论是为了比较新提出的ResNet变体在ImageNet上的Top-1准确率,还是评估一个大型语言模型在MMLU上的常识推理能力&am…...

开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南
开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南 【免费下载链接】Tkinter-Designer An easy and fast way to create a Python GUI 🐍 项目地址: https://gitcode.com/gh_mirrors/tk/Tkinter-Designer 在Python GUI开发…...

PCB虚焊/走线断裂/焊盘脱落工程师易漏判
PCB 故障中,30% 并非元件损坏,而是 PCB 本身的隐性故障—— 虚焊、走线断裂、焊盘脱落、过孔开路。这类故障外观隐蔽、时好时坏、排查难度大,很多工程师反复更换元件仍无法解决,最终误判为 “板报废”。一、PCB 隐性故障核心成因…...
)
告别SVN恐惧症:美术策划也能轻松上手的Unity PlasticSCM极简入门(附团队项目拉取实战)
告别SVN恐惧症:美术策划也能轻松上手的Unity PlasticSCM极简入门(附团队项目拉取实战) 在游戏开发团队中,版本控制系统是协作的基石,但传统工具如SVN往往让非技术成员望而生畏。当美术资源频繁更新、策划案不断迭代时&…...
:3类高危使用场景+2个监管红线预警)
Claude SWOT分析(内部风控文档流出版):3类高危使用场景+2个监管红线预警
更多请点击: https://intelliparadigm.com 第一章:Claude SWOT分析(内部风控文档流出版):3类高危使用场景2个监管红线预警 高危使用场景识别 在企业级AI应用中,Claude模型若未经严格风控适配,…...

通用物联网开发板设计:基于ESP8266的硬件集成与开发实践
1. 项目概述:为什么我们需要一块“通用”的物联网开发板?在捣鼓了几年物联网项目之后,我发现自己桌面上堆满了各种开发板:ESP8266、ESP32、Arduino Uno、STM32 Nucleo……每个项目都要重新连线、配置电源、焊接传感器接口…...
)
DeepSeek安全测试辅助Prompt工程白皮书(含17个CVE靶场验证指令模板)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek安全测试辅助 DeepSeek系列大模型在代码生成、漏洞模式识别与安全上下文理解方面展现出独特优势,可作为安全测试工程师的智能协作者。其对OWASP Top 10、CWE分类体系及常见PoC结构具…...

【RT-DETR实战】070、模型分析工具:PyTorch Profiler性能分析
上周在部署RT-DETR到边缘设备时遇到一个诡异现象:模型推理时延波动极大,有时30ms,偶尔突然跳到200ms。 盯着代码看了半天没发现逻辑问题,数据流也正常。这种时候,靠猜是没用的,必须上性能分析工具——PyTorch Profiler。 今天我们就来聊聊怎么用它揪出那些藏在细节里的…...

树莓派Zero离线语音交互实战:TTS与STT引擎部署与优化
1. 项目概述:为什么选择树莓派 Zero 来实现语音功能?如果你玩过 Arduino、ESP32 这类微控制器,也接触过树莓派 4B 这样的单板电脑,那你大概能理解那种“选择困难症”:微控制器实时性强、功耗低,但算力有限&…...

JMeter实现RSA签名验签全流程实战
1. 为什么RSA加密接口测试总卡在“连通但失败”这一步? 你有没有遇到过这种情况:接口文档写得清清楚楚,Postman里填好URL、Header、Body,一发请求——返回 {"code":4001,"msg":"签名验证失败"} …...