使用opencv的tracking模块跟踪目标
OpenCV跟踪模块算法介绍
OpenCV的tracking模块是一个功能强大的跟踪算法库,包含多种用于跟踪对象的算法。它可以帮助你在连续的视频帧中定位一个物体,例如人脸、眼睛、车辆等。
在OpenCV的tracking模块中,一些主要的跟踪算法包括:
- 稀疏光流(Sparse optical flow):例如Kanade-Lucas-Tomashi (KLT)特征跟踪算法,跟踪图像中几个特征点的位置。
- 卡尔曼滤波(Kalman Filtering):一种非常流行的基于先验运动信息的信号处理算法,用于预测运动目标的位置。这种算法的早期应用之一是导弹制导。
- Meanshift和Camshift:这是定位密度函数最大值的算法,它们还用于跟踪。
单目标跟踪器(Single object trackers):在这类跟踪器中,第一个帧使用矩形标记,以指示要跟踪的对象的位置。然后使用跟踪算法在后续帧中跟踪对象。在大多数实际应用程序中,这些跟踪器与对象检测器一起使用。 - 多目标跟踪查找算法(Multiple object track finding algorithms):当我们有一个快速的目标检测器时,在每一帧中检测多个对象,然后运行一个跟踪查找算法来识别一个帧中的哪个矩形与下一个帧中的矩形相对应是有意义的。
这些算法各有优缺点,可以根据实际应用场景选择适合的算法。
具体调用步骤如下:
- 打开视频帧第一帧
- 框选目标,每选择一个目标按Enter键确认选择
- 按Esc退出框选模式
- 程序执行跟踪算法并绘制预测框
#include <opencv2/opencv.hpp>
#include <opencv2/tracking.hpp>
#include "timestamp.hpp"using namespace cv;
using namespace std;//加载静态库
#if defined(_WIN32)&&defined(_DEBUG)
#pragma comment(lib, "opencv_world346d.lib")
#elif defined(_WIN32)
#pragma comment(lib, "opencv_world346.lib")
#endif// 支持的跟踪算法
vector<string> trackerTypes = { "BOOSTING", "MIL", "KCF", "TLD", "MEDIANFLOW", "GOTURN", "MOSSE", "CSRT" };// 根据名字创建跟踪器
Ptr<Tracker> createTrackerByName(string trackerType)
{Ptr<Tracker> tracker;if (trackerType == trackerTypes[0])tracker = TrackerBoosting::create();else if (trackerType == trackerTypes[1])tracker = TrackerMIL::create();else if (trackerType == trackerTypes[2])tracker = TrackerKCF::create();else if (trackerType == trackerTypes[3])tracker = TrackerTLD::create();else if (trackerType == trackerTypes[4])tracker = TrackerMedianFlow::create();else if (trackerType == trackerTypes[5])tracker = TrackerGOTURN::create();else if (trackerType == trackerTypes[6])tracker = TrackerMOSSE::create();else if (trackerType == trackerTypes[7])tracker = TrackerCSRT::create();else {cout << "Incorrect tracker name" << endl;cout << "Available trackers are: " << endl;for (vector<string>::iterator it = trackerTypes.begin(); it != trackerTypes.end(); ++it)std::cout << " " << *it << endl;}return tracker;
}// Fill the vector with random colors
void getRandomColors(vector<Scalar> &colors, int numColors)
{RNG rng(0);for (int i = 0; i < numColors; i++)colors.push_back(Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)));
}int help(char* argv[])
{std::cout << "please input arguments:" << argv[0] << "tracktype video.mp4 videoiotype"<< std::endl;return -1;
}int main(int argc, char * argv[])
{if(argc < 4){return help(argv);}cout << "默认算法是CSRT" << endl;cout << "支持的算法包括:" << endl;for (vector<string>::iterator it = trackerTypes.begin(); it != trackerTypes.end(); ++it)std::cout << " " << *it << endl;// 设置跟踪器类型。更改此设置以尝试不同的跟踪器。 字符串 trackerType;if(atoi(argv[1]) == 0)trackerType = "MOSSE";else if(atoi(argv[1]) == 1)trackerType = "KCF";elsetrackerType = "CSRT";// 设置跟踪算法和视频的默认值string videoPath = argv[2];// 使用跟踪算法初始化 MultiTrackervector<Rect> bboxes;// 创建视频捕获对象以读取视频cv::VideoCapture cap;if(atoi(argv[3]) == 0)cap.open(0);else{cap.open(videoPath);}Mat frame;// 如果取消读取视频文件,则退出if (!cap.isOpened()){cout << "Error opening video file " << videoPath << endl;return -1;}// read first framecap >> frame;// 在对象上绘制边界框// selectROI 的默认行为是从中心开始绘制框// 当 fromCenter 设置为 false 时,可以从左上角开始绘制框bool showCrosshair = true;bool fromCenter = false;cout << "\n==========================================================\n";cout << "OpenCV 表示按 c 取消对象选择过程" << endl;cout << "这是行不通的。按 Esc 键退出选择过程" << endl;cout << "\n==========================================================\n";cv::selectROIs("MultiTracker", frame, bboxes, showCrosshair, fromCenter);// quit if there are no objects to trackif (bboxes.size() < 1)return 0;vector<Scalar> colors;getRandomColors(colors, bboxes.size());// 创建多跟踪器Ptr<MultiTracker> multiTracker = cv::MultiTracker::create();// 初始化 Multitrackerfor (int i = 0; i < bboxes.size(); i++)multiTracker->add(createTrackerByName(trackerType), frame, Rect2d(bboxes[i]));// 处理视频和跟踪对象cout << "\n==========================================================\n";cout << "开始跟踪,按 ESC 键退出。" << endl;while (cap.isOpened()){// 从视频中获取帧cap >> frame;// 如果到达视频末尾,请停止程序if (frame.empty()) break;{timestamp ti("update");// 使用新帧更新跟踪结果multiTracker->update(frame);}// 绘制跟踪对象for (unsigned i = 0; i < multiTracker->getObjects().size(); i++){rectangle(frame, multiTracker->getObjects()[i], colors[i], 2, 1);}// 显示帧imshow("MultiTracker1", frame);// 退出 X 按钮if (waitKey(1) == 27) break;}
}相关文章:
使用opencv的tracking模块跟踪目标
OpenCV跟踪模块算法介绍 OpenCV的tracking模块是一个功能强大的跟踪算法库,包含多种用于跟踪对象的算法。它可以帮助你在连续的视频帧中定位一个物体,例如人脸、眼睛、车辆等。 在OpenCV的tracking模块中,一些主要的跟踪算法包括࿱…...
Debian或Ubuntu静态交叉编译arm和aarch64
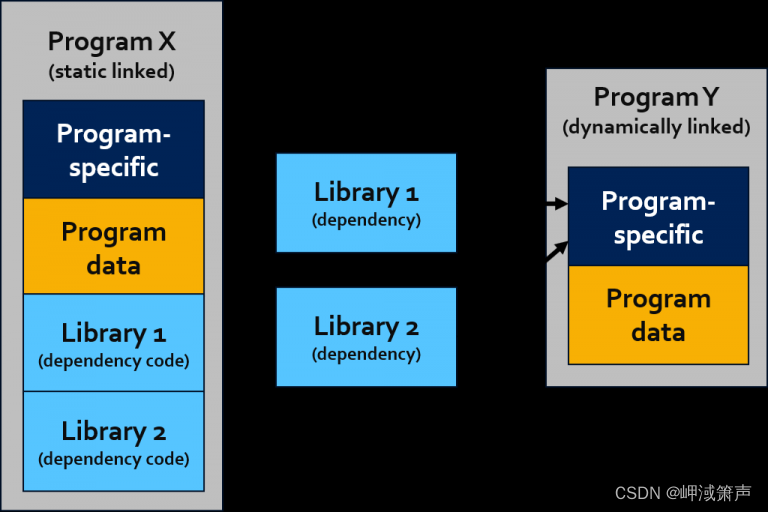
Debian或Ubuntu静态交叉编译arm和aarch64 介绍术语ARM架构前置条件从源代码编译一个简单的C程序configure和make交叉编译关于静态链接和依赖关系使用 musl libc 实现与 configure 和 make 进行交叉编译 ARM 正在获得越来越多的关注,并且越来越受欢迎。直接在这些基于…...

最新ai系统ChatGPT程序源码+详细搭建教程+以图生图+Dall-E2绘画+支持GPT4+Midjourney绘画
一、AI创作系统 SparkAi创作系统是基于OpenAI很火的ChatGPT进行开发的Ai智能问答系统和Midjourney绘画系统,支持OpenAI-GPT全模型国内AI全模型。本期针对源码系统整体测试下来非常完美,可以说SparkAi是目前国内一款的ChatGPT对接OpenAI软件系统。那么如…...
【设计模式】第16节:行为型模式之“命令模式”
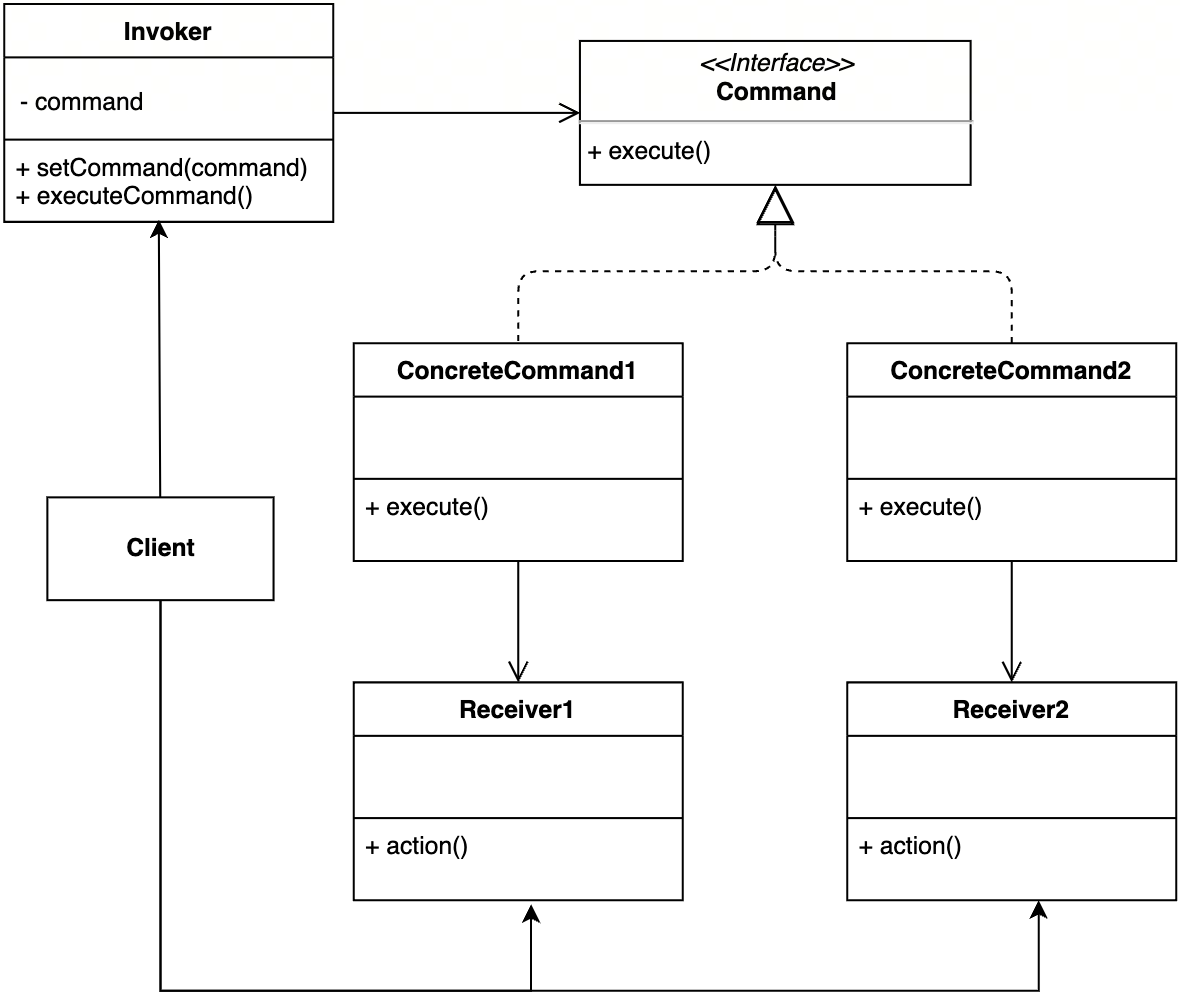
一、简介 命令模式:将请求(命令)封装为一个对象,这样可以使用不同的请求参数化其他对象(将不同请求依赖注入到其他对象),并且能够支持请求(命令)的排队执行、记录日志、…...
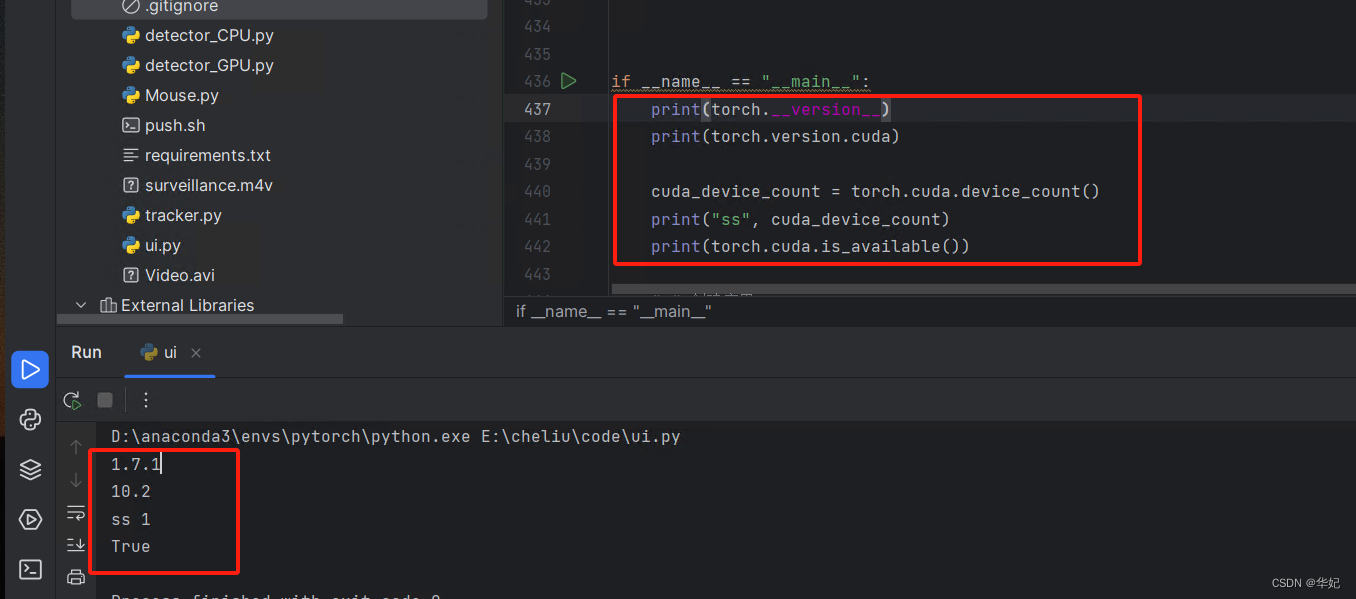
安装pytorch报错torch.cuda.is_available()=false的解决方法
参考文章: https://blog.csdn.net/qq_46126258/article/details/112708781 https://blog.csdn.net/Andy_Luke/article/details/122503884 https://blog.csdn.net/anmin8888/article/details/127910084 https://blog.csdn.net/zcs2632008/article/details/127025294 …...

自定义表格的表头根据后端的数据进行筛选是否进行自定义表头添加按钮
自定义表格的表头根据后端的数据进行筛选是否进行自定义表头添加按钮 自定义表格的表头根据后端的数据进行筛选是否进行自定义表头添加按钮 <template><div class"box"><el-table :data"msgMapList" border class"table">&l…...
海上风电应急救援vr模拟安全培训提高企业风险防范能力
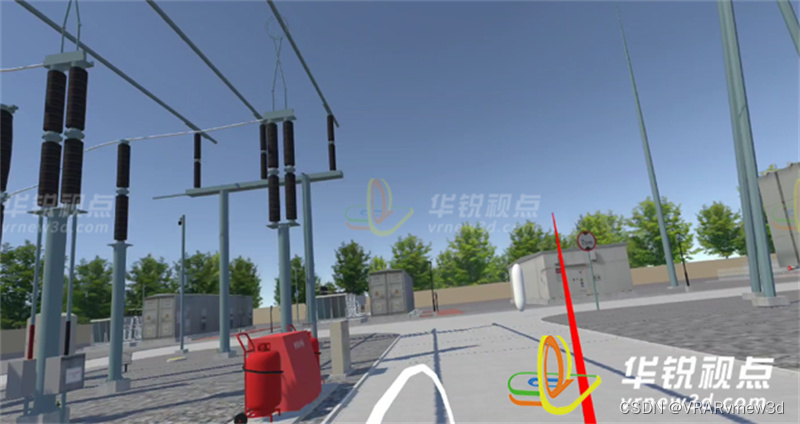
相比传统的发电厂,海上风电作业积累的经验少,风险高,因此为了规范施工人员的行为和操作,保障生产安全进行,开展海上风电VR安全培训具有重要意义。 有助于提高员工的安全意识 通过模拟真实的海上风电作业环境࿰…...
自定义SpringBoot启动图标
在SpringBoot项目的resources目录下创建banner.txt文件 在https://www.bootschool.net/网站上复制Ascll艺术字(图)粘贴到banner.txt中保存。 启动项目就会加载 可以修改颜色,和版本号 ${application.version} 输出版本 ${spring-boot.v…...
diffusers-Tasks
https://huggingface.co/docs/diffusers/using-diffusers/unconditional_image_generationhttps://huggingface.co/docs/diffusers/using-diffusers/unconditional_image_generation1.Unconditional image generation 无条件图像生成是一个相对简单的任务。模型仅生成图像&…...

文件下载漏洞, 漏洞原理, 测试方法, 漏洞防御, 常见敏感路径
文件下载漏洞 一, 文件下载漏洞原理 利用条件: 1. 读取文件的路径是用户可控, 且没有校验或检验不严. 2. 使用了读取文件的函数. 3. 输出了文件内容.漏洞场景一: 后端没有限制哪些路径的文件可以下载 后端代码: http://192.168.112.200/security/download.php $file_pat…...

【零参考GAN:Pansharpening】
ZeRGAN: Zero-Reference GAN for Fusion of Multispectral and Panchromatic Images (用于多光谱和全色图像融合的零参考GAN) 本文提出了一种融合低空间分辨率多光谱(LR MS)和高空间分辨率全色(PAN)图像的新的全色锐化方法–零参考生成对抗网络(ZeRGAN…...

Nacos 注册中心介绍与实操
前言 本文为个人SpringCloud学习笔记,主要记录Nacos的注册中心实操、SpringBoot多模块编程实操等 注册中心 注册中心介绍 注册中心是微服务的一个重要组件,用于实现服务的注册与发现,主要作用包括以下: 服务注册:…...
基于51单片机的智能手机充电器设计
**单片机设计介绍,1660【毕设课设】基于51单片机和MAX1898的智能手机充电器设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 51单片机智能手机充电器设计介绍 51单片机智能手机充电器是一种可以实现智能快速充电的…...

nginx 和gateway配置实现动静分离和反向代理
这两个配置文件分别是Nginx和Spring Cloud Gateway的配置文件,它们用于构建网关服务,进行请求的路由和转发。 前端发送请求的时候为了不暴露服务器地址,所以会使用nginx做反向代理的一个主要作用是隐藏后端服务器的真实地址,从而增加网络安全…...
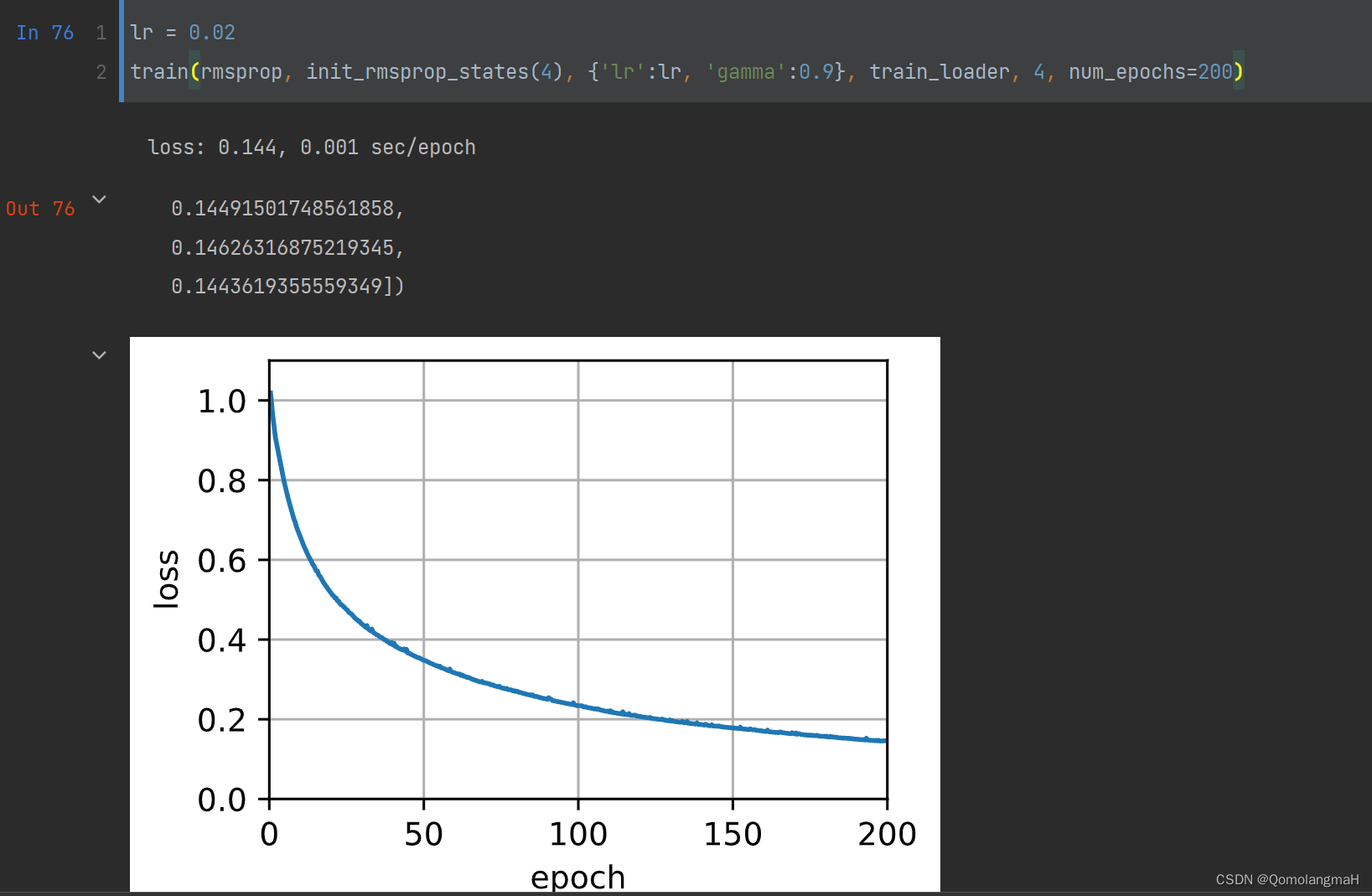
【深度学习实验】网络优化与正则化(二):基于自适应学习率的优化算法详解:Adagrad、Adadelta、RMSprop
文章目录 一、实验介绍二、实验环境1. 配置虚拟环境2. 库版本介绍 三、实验内容0. 导入必要的库1. 随机梯度下降SGD算法a. PyTorch中的SGD优化器b. 使用SGD优化器的前馈神经网络 2.随机梯度下降的改进方法a. 学习率调整b. 梯度估计修正 3. 梯度估计修正:动量法Momen…...
系统韧性研究(3)| 工程系统韧性要求
从最基本的层面上说,系统韧性指的是系统在逆境中继续执行其任务的程度。虽然对操作连续性至关重要,但系统的服务(能力)只是系统继续执行其任务所必须保护的一些资产。该系统必须检测不利因素,对其作出反应,…...
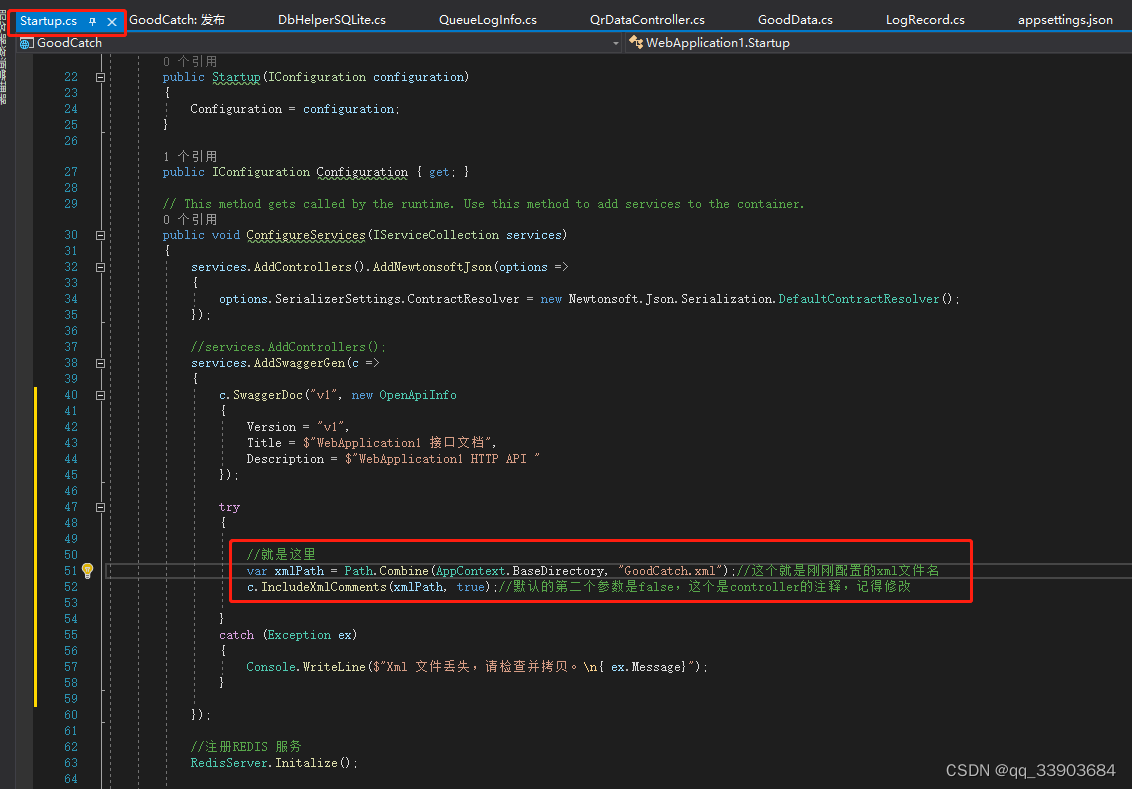
.net 5 发布后swagger页面不显示问题
1:项目右键属性-》生成xml--用于swagger文件读取 2:开启文件配饰swagger读取指定文件...
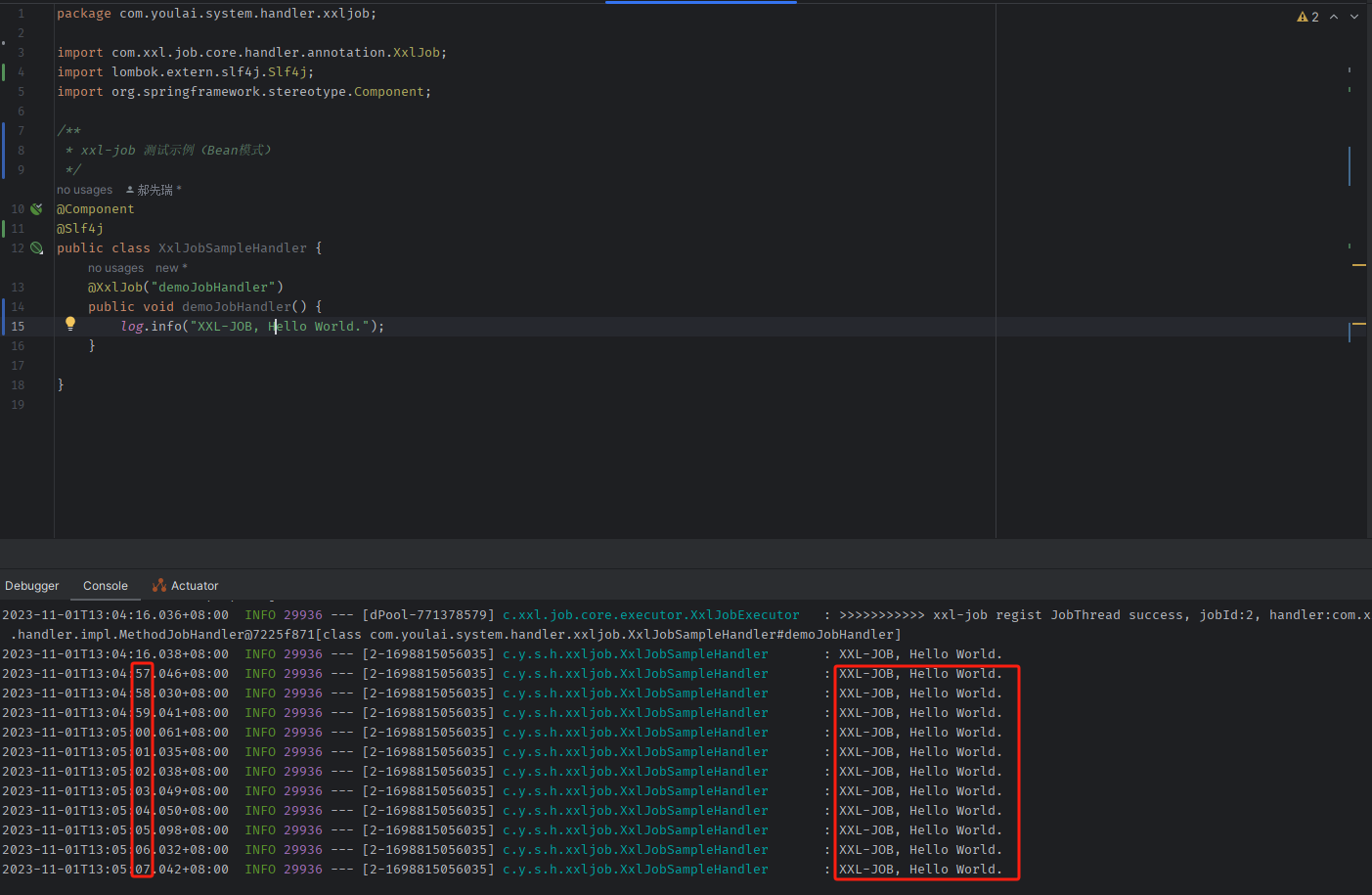
Spring Boot 3 整合 xxl-job 实现分布式定时任务调度,结合 Docker 容器化部署(图文指南)
目录 前言初始化数据库Docker 部署 xxl-job下载镜像创建容器并运行访问调度中心 SpringBoot 整合 xxl-jobpom.xmlapplication.ymlXxlJobConfig.java执行器注册查看 定时任务测试添加测试任务配置定时任务测试结果 结语附录xxl-job 官方文档xxl-job 源码测试项目源码 前言 xxl-…...

1985-2020年我国30m土地利用覆盖数据介绍
土地覆盖(LC)决定了地球各圈层之间的能量交换、水和碳循环。准确的 LC 信息是环境和气候研究的基本参数。考虑到在过去几十年中,随着经济建设的发展,中国发生了巨大的变化,连续和精细的 LC 监测是迫切需要的。然而,目前࿰…...
Django 社区志愿者管理系统
摘 要 随着社会的发展,社会的各行各业都在利用信息化时代的优势。计算机的优势和普及使得各种信息系统的开发成为必需。 社区志愿者服务管理系统,主要的模块包括查看首页、个人中心、通知公告管理、志愿者管理、普通管理员管理、志愿活动管理、活动宣…...

为什么92%的DeepSeek生产环境存在越权风险?——企业级访问策略配置检查表,限免领取24小时
更多请点击: https://intelliparadigm.com 第一章:DeepSeek访问控制配置的现状与风险全景 当前,DeepSeek系列模型在企业私有化部署场景中广泛采用基于API密钥与角色权限分离的访问控制机制。然而,大量实际配置案例表明࿰…...

Python安全自动化:构建可落地的渗透测试工作流
1. 这不是炫技工具箱,而是一套可落地的安全工作流“黑客的‘瑞士军刀’”这个说法在安全圈里被用滥了——很多人一听到就想到Kali Linux里那堆图标花哨、命令冗长、跑起来动不动就报错的GUI工具。但真正干过渗透测试的人心里都清楚:能稳定复现、可嵌入流…...

在taotoken控制台查看与分析api用量数据的实践心得
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Taotoken控制台查看与分析API用量数据的实践心得 1. 引言 对于任何将大模型API集成到应用或工作流中的开发者或团队而言&#x…...

量子优化在LLM代码生成测试中的应用与优势
1. 量子优化如何重塑LLM代码生成测试流程在当前的软件开发实践中,大语言模型(LLM)已经成为了不可或缺的代码生成工具。但每个使用过GitHub Copilot或类似工具的开发者都深有体会:模型生成的代码虽然功能正确,却常常包含大量冗余逻辑和不必要的…...

3步快速实现Android Studio完整汉化:告别英文困扰,提升开发效率
3步快速实现Android Studio完整汉化:告别英文困扰,提升开发效率 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack…...

Mac Mouse Fix技术架构深度解析:如何通过系统级事件拦截实现鼠标功能增强
Mac Mouse Fix技术架构深度解析:如何通过系统级事件拦截实现鼠标功能增强 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 在macOS生…...

告别网课低效循环:这款开源工具如何让学习时间减半
告别网课低效循环:这款开源工具如何让学习时间减半 【免费下载链接】mooc-assistant 慕课助手 浏览器插件(Chrome/Firefox/Opera) 项目地址: https://gitcode.com/gh_mirrors/mo/mooc-assistant 你是否曾在深夜对着电脑屏幕,一遍遍重复着相同的手…...

3步搞定B站缓存视频转换:m4s-converter完整使用指南
3步搞定B站缓存视频转换:m4s-converter完整使用指南 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经为B站缓存的视频无法在…...

Postman与JMeter协同实战:接口功能验证与性能压测一体化方案
1. 这不是工具组合秀,而是接口测试工程师的生存现场你有没有过这样的经历:开发刚提测,接口文档还没写完,测试环境连基础鉴权都配不齐,但上线时间表已经钉死在下周三?这时候打开Postman点几下,发…...

如何轻松搞定Windows系统依赖:一站式Visual C++运行库完整指南
如何轻松搞定Windows系统依赖:一站式Visual C运行库完整指南 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过打开软件或游戏时弹出&…...