【数据结构二叉树】先序层序建立、递归非递归遍历层序遍历、树高、镜面、对称、子树、合并、目标路径、带权路径和等等
二叉树
文章目录
- 二叉树
- 1. 二叉树的建立(递归创建,结构体指针形式)
- 1.1. 先序建立
- 1.2. 层序建立
- 2. 递归遍历(结构体指针)
- 2.1. 先序遍历
- 2.2. 中序遍历
- 2.3. 后序遍历
- 3. 非递归遍历(结构体指针)
- 3.1. 层次遍历
- 3.2. 后序遍历(非递归)
- 4. 求树的高度
- 5. 中后序遍历构建
- 6. 二叉树镜面翻转
- 7. 对称二叉树
- 8. 输出所有目标路径
- 9. 判断是否为子树
- 10. 合并二叉树
- 11. 带权路径和
前言:这篇博客需要你对于二叉树有大致的了解,并且对于递归有一定的理解,懂得先序中序后序层次是啥等等,因为在这篇博客我不会对这一些概念进行讲解,我只会将我写的我看见的比较好比较简洁的代码块截下来,并不会对它进行进行过多的讲解,所以如果选择了这一篇博客,就应该做好理解透彻的准备!
1. 二叉树的建立(递归创建,结构体指针形式)
先来给出结构体:
struct Node
{char data;Node* leftchild = nullptr;Node* rightchild = nullptr;
};
1.1. 先序建立
#include<iostream>
#include<string>
using namespace std;
struct Node
{char a;Node* leftchild = nullptr;Node* rightchild = nullptr;
};
class BuildTree
{
public:Node* gen;int i = 0;//遍历arrBuildTree() { gen = nullptr; }void setTree(string arr){gen = new Node;CreateBiTree(gen, arr);return;}// 核心代码void CreateBiTree(Node*& root, string strTree) //先序遍历构建二叉树{char ch;ch = strTree[i++];if (ch == '#'){root = NULL;}else{root = new Node();root->a = ch;CreateBiTree(root->leftchild, strTree);CreateBiTree(root->rightchild, strTree);}return;}
};
int main()
{int n;cin >> n;while (n--){BuildTree* bt = new BuildTree;string arr;cin >> arr;bt->setTree(arr);delete bt;}
}
1.2. 层序建立
#include <iostream>
#include <queue>
#include <string>
using namespace std;struct Node {char data;Node* leftchild;Node* rightchild;
};void pre_view(Node* root)
{if (root != nullptr){cout << root->data << ' ';pre_view(root->leftchild);pre_view(root->rightchild);}return;
}// 层序建立
void CreateBiTree(Node*& root, string strTree) {if (strTree.empty()) {root = nullptr;return;}queue<Node*> nodeQueue;int i = 0;root = new Node();root->data = strTree[i++];nodeQueue.push(root);while (!nodeQueue.empty()) {Node* current = nodeQueue.front();nodeQueue.pop();if (i < strTree.length() && strTree[i] != '#') {current->leftchild = new Node();current->leftchild->data = strTree[i];nodeQueue.push(current->leftchild);}i++;if (i < strTree.length() && strTree[i] != '#') {current->rightchild = new Node();current->rightchild->data = strTree[i];nodeQueue.push(current->rightchild);}i++;}
}int main() {string strTree = "122#3#3";Node* root = nullptr;CreateBiTree(root, strTree);// 先序遍历查看结果pre_view(root);return 0;
}
2. 递归遍历(结构体指针)
2.1. 先序遍历
void pre_send(Node* root)
{if (root != NULL){cout << (root->data);pre_send(root->leftchild);pre_send(root->rightchild);}return;
}
2.2. 中序遍历
void in_sned(Node* root)
{if (root != NULL){in_sned(root->leftchild);cout << (root->data);in_sned(root->rightchild);}return;
}
2.3. 后序遍历
void post_send(Node* root)
{if (root != NULL){post_send(root->leftchild);post_send(root->rightchild);cout << (root->data);}return;
}
3. 非递归遍历(结构体指针)
首先给出结构体:
struct Node
{int a;Node* Leftchild = nullptr;Node* Rightchild = nullptr;
}
3.1. 层次遍历
void levelorder(Node* gen)
{queue<Node*>q;q.push(gen);while (!q.empty()){Node* now = q.front();q.pop();if (now == nullptr)continue;cout << now->a;if (now->Leftchild != nullptr)q.push(now->Leftchild);if (now->Rightchild != nullptr)q.push(now->Rightchild);}
}
3.2. 后序遍历(非递归)
void postRead(Node* gen)
{stack<Node*>s;Node* root = gen, * check = nullptr;while (root != nullptr || !s.empty()){if (root != nullptr)//一直向左走{s.push(root);root = root->Leftchild;}else{root = s.top();//右节点存在且未访问if (root->Rightchild != nullptr && root->Rightchild != check){root = root->Rightchild;s.push(root);root = root->Leftchild;}else{s.pop();cout << root->a;check = root;root = nullptr;}}}
}
4. 求树的高度
int getHeight(Node* root)
{if (root == nullptr)return 0;int leftdeep = getHeight(root->Leftchild);int rightdeep = getHeight(root->Rightchild);int deep = 1 + (leftdeep > rightdeep ? leftdeep : rightdeep);return deep;
}
5. 中后序遍历构建
这个部分是我在做题的时候看到的,感觉搞懂这一块之后会对前中后序有更好的理解,这一道题就是:知道后序的规律!题目名字为:二叉树的中后序遍历构建及求叶子,可以自己搜搜看。
#include<iostream>
#include<cstring>
using namespace std;
class Tree
{
public:int* mid;int* last;int min = 10000000;Tree(int t){mid = new int[t + 5];last = new int[t + 5];for (int i = 0; i < t; i++){cin >> mid[i];}for (int i = 0; i < t; i++){cin >> last[i];}}~Tree(){delete mid, last;}int get_min(){return min;}void BuildTree(int mid_l, int mid_r, int last_l, int last_r){if (mid_l == mid_r){if (mid[mid_l] <= min)min = mid[mid_l];return;}for (int i = mid_l; i <= mid_r; i++){if (mid[i] == last[last_r]){BuildTree(mid_l, i - 1, last_l, last_l + i - mid_l - 1);BuildTree(i + 1, mid_r, last_l + i - mid_l, last_r - 1);}}}
};
int main()
{int n;cin >> n;while (n--){int t;cin >> t;Tree* tree = new Tree(t);tree->BuildTree(0, t - 1, 0, t - 1);cout << tree->get_min() << endl;delete tree;}return 0;
}6. 二叉树镜面翻转
void Mirror_inversion(Node* p)
{if (p != NULL){Mirror_inversion(p->Leftchild);Mirror_inversion(p->Rightchild);swap(p->Leftchild, p->Rightchild);}
}
7. 对称二叉树
bool judge(Node* root_1, Node* root_2)
{if (root_1 == nullptr && root_2 == nullptr){return true;}else if (root_1 == nullptr || root_2 == nullptr){return false;}else if (root_1->data != root_2->data){return false;}return judge(root_1->leftchild, root_2->rightchild) && judge(root_1->rightchild, root_2->leftchild);
}bool isSymmetric(Node* root)
{return judge(root->leftchild, root->rightchild);
}
8. 输出所有目标路径
void DFS_target(Node* node, int targetSum, vector<int>& path, vector<vector<int>>& result) {if (node == nullptr) {return;}path.push_back(node->data);if (node->leftchild == nullptr && node->rightchild == nullptr) {if (targetSum == node->data) {result.push_back(path);}}else {DFS_target(node->leftchild, targetSum - node->data, path, result);DFS_target(node->rightchild, targetSum - node->data, path, result);}path.pop_back();return;
}
9. 判断是否为子树
bool isSameTree(Node* t1, Node* t2) {// 考虑到后面子叶节点的左右节点,如果都为空就会返回Trueif (!t1 && !t2) {return true;}// 如果有一个节点有左右节点,而另一个节点没有的话就会返回false,而都有不会进入,都没有在上面会返回Trueif (!t1 || !t2) {return false;}return (t1->data == t2->data) && isSameTree(t1->leftchild, t2->leftchild) && isSameTree(t1->rightchild, t2->rightchild);
}// 判断tree1是否包含tree2的子树
bool isSubtree(Node* tree1, Node* tree2) {if (!tree1) {return false;}// tree1不空就开始考虑if (isSameTree(tree1, tree2)) {return true;}// 每一个节点向下进行考虑,如果有一个是符合的就返回Truereturn isSubtree(tree1->leftchild, tree2) || isSubtree(tree1->rightchild, tree2);
}10. 合并二叉树
void addWith(Node*& root_1, Node* root_2)
{if (root_1 == nullptr && root_2 != nullptr){root_1 = new Node;root_1->data = root_2->data;root_1->leftchild = root_2->leftchild; // Handle left childroot_1->rightchild = root_2->rightchild; // Handle right childreturn;}if (root_2 == nullptr){return;}root_1->data += root_2->data;addWith(root_1->leftchild, root_2->leftchild);addWith(root_1->rightchild, root_2->rightchild);
}
11. 带权路径和
void findDeepTree(Node* root, int* data, int dis)
{if (root == nullptr || index == n){return;}if (root->leftchild == nullptr && root->rightchild == nullptr){result = result + dis * data[index++];return;}if (root->leftchild != nullptr)findDeepTree(root->leftchild, data, dis + 1);if (root->rightchild != nullptr)findDeepTree(root->rightchild, data, dis + 1);return;
}
相关文章:

【数据结构二叉树】先序层序建立、递归非递归遍历层序遍历、树高、镜面、对称、子树、合并、目标路径、带权路径和等等
二叉树 文章目录 二叉树1. 二叉树的建立(递归创建,结构体指针形式)1.1. 先序建立1.2. 层序建立 2. 递归遍历(结构体指针)2.1. 先序遍历2.2. 中序遍历2.3. 后序遍历 3. 非递归遍历(结构体指针)3.1. 层次遍历3.2. 后序遍历(非递归) 4. 求树的高…...
Mybatis延迟加载(缓存)
延迟加载 分步查询的优点:可以实现延迟加载,但是必须在核心配置文件中设置全局配置信息:lazyLoadingEnabled:延迟加载的全局开关。当开启时,所有关联对象都会延迟加载 aggressiveLazyLoading:当开启时&…...

我对美团的看法,作为美团的股东,我都有点懵
我是美团的股东,你看股价,我都想骂人了。 这帖子就一句话。足以表明我的无奈。...
【Java】文件操作和IO
❤️ Author: 老九 ☕️ 个人博客:老九的CSDN博客 🙏 个人名言:不可控之事 乐观面对 😍 系列专栏: 文章目录 文件概念文件的分类常见的文件类型文件系统的目录结构路径 Java中的文件操作文件系统相关操作绝…...

uniapp页面间传参的方法
在uniapp中,常见的页面传参方式有以下几种: URL传参 可以在跳转页面时,在url中添加参数,通过在目标页面的onLoad函数中的options参数获取传递的参数。示例代码如下: 在源页面中: uni.navigateTo({url: …...
vsan 7.0.3部署后常见问题
一、数据库版本问题 https://partnerweb.vmware.com/service/vsan/all.json 登录可以访问 Internet 的工作站。在浏览器中打开以下链接: https://partnerweb.vmware.com/service/vsan/all.json (右键单击,另存为)将此文件另存为 all.json。如果无法保存…...
【Git】Git使用指南+上传项目踩坑总结
记录Git 使用和命令解读: git init git add .git commit -m "first commit"git branch -M maingit remote add origin https://github.com/xxx.gitgit push -u origin main 这是最经常用到的使用 git上传项目的代码,值得注意的是,…...
Django之登录注册
最近在准备上线一个网站(基于django的编程技术学习与外包服务网站),所以会将自己的在做这个项目的过程中遇到的模块业务以及所涉及到的部分技术记录在CSDN平台里,一是希望可以帮到有需要的同学,二十以供自己后续回顾学…...

Android 10-11适配外部存储方案
Android Api 29 对文件和文件夹进行了重大更改。不允许使用外部存储,如下方法: Environment.getExternalStorageDirectory() /mnt/sdcard Environment.getExternalStoragePublicDirectory(“test”) /mnt/sdcard/test 只能使用内部存储 getExterna…...
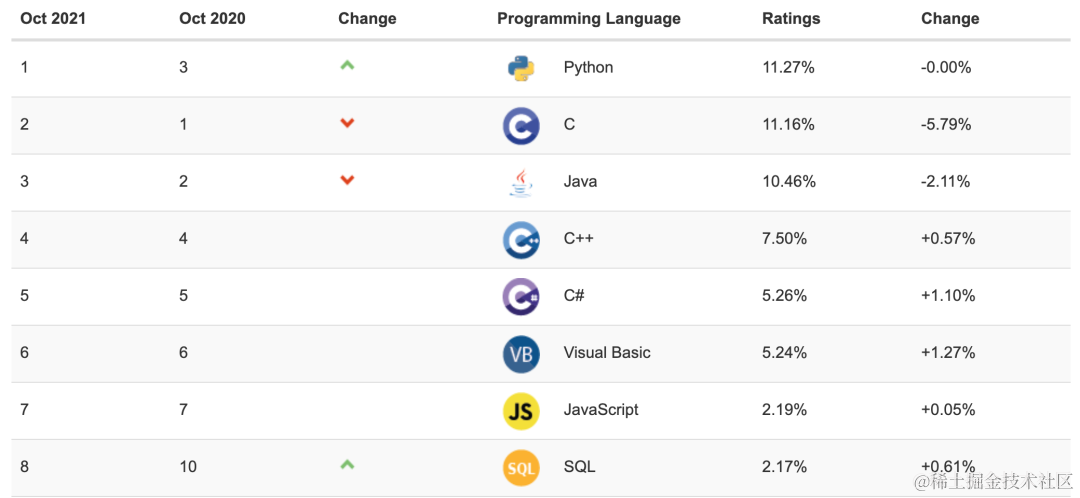
软件测试/测试开发丨Python:易学、强大、多用途的编程语言
点此获取更多相关资料 Python 发展历史 Python 是一门高级编程语言,由 Guido van Rossum(龟叔) 在 1989 年发明,设计 Python 语言的初衷是为了创造一种介于 C 和 shell 之间,简洁方便,易学易用࿰…...
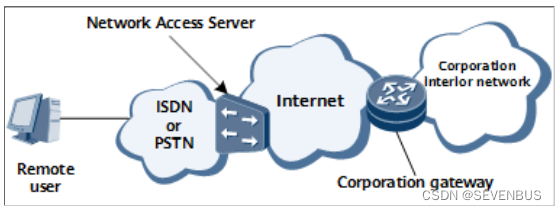
一、VPN基础
VPN基础 1、定义及特征2、VPN优势3、VPN分类4、VPN体系结构5、VPN实现的模式 —————————————————————————————————————————————————— 1、定义及特征 虚拟专用网VPN是依靠Internet服务提供商ISP和网络服务提供商NSP在公共网…...

淘宝协议最新版
我可以为您提供一些示例代码,以演示一些与电商平台相关的功能。请注意,以下代码仅为示例,具体实现还需要根据您的应用程序的架构、技术栈和需求进行调整和扩展。 1. 用户注册功能: - 后端实现:在后端,您可…...
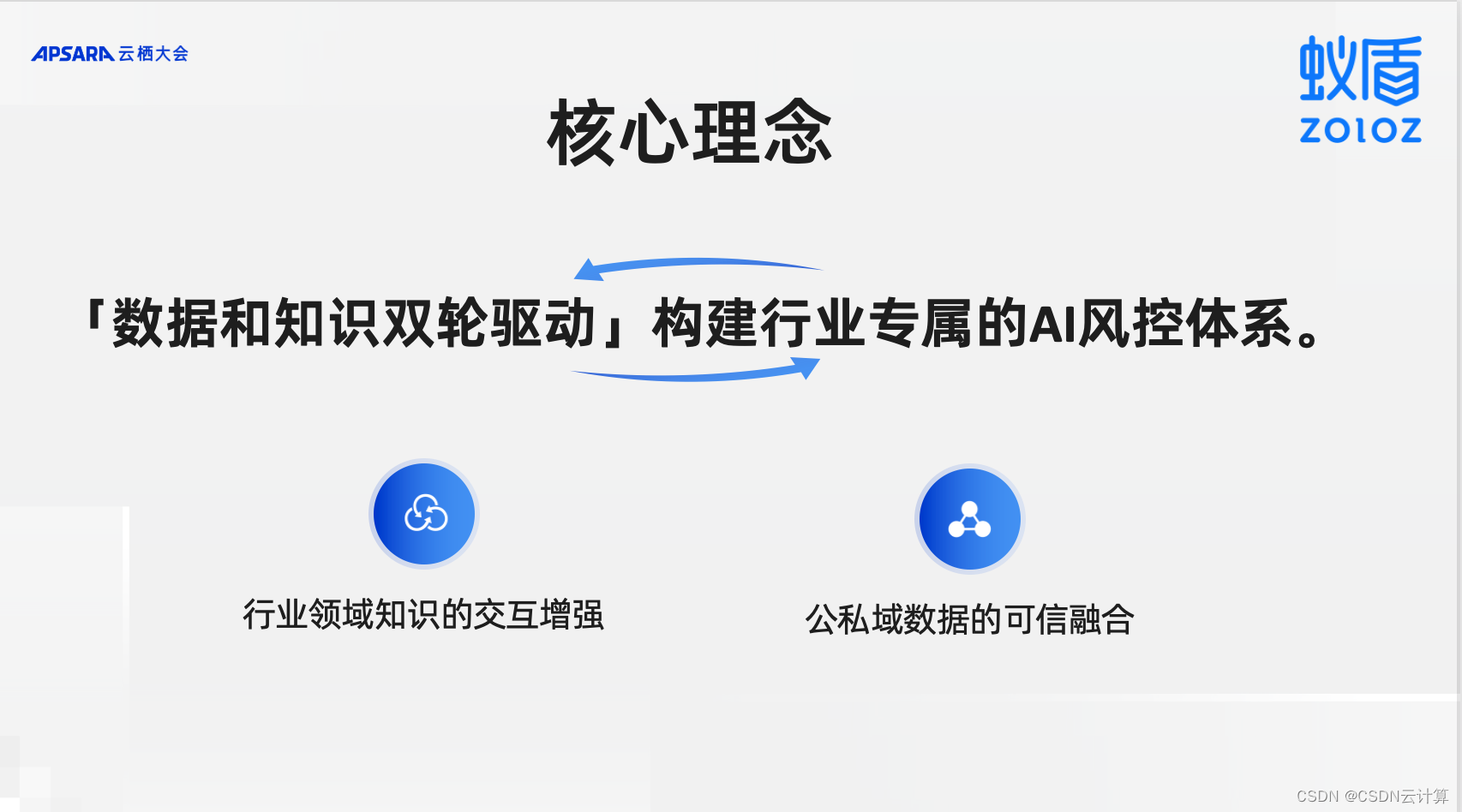
AI“走深向实”,蚂蚁蚁盾在云栖大会发布实体产业「知识交互建模引擎」
数字化起步晚、数据分散稀疏、专业壁垒高、行业知识依赖「老师傅」,是很多传统产业智能化发展面临的难题。2023年云栖大会上,蚂蚁集团安全科技品牌蚁盾发布“知识交互建模引擎”,将实体产业知识与AI模型有机结合,助力企业最快10分…...
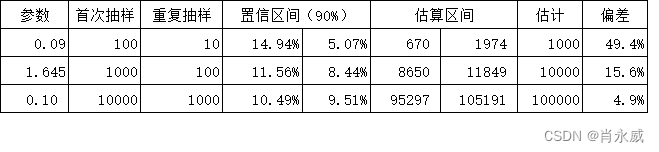
如何估计池塘里鱼的数目,周边有多少车辆?
如何估计池塘里鱼的数目? 老李想估计一下自己池塘里鱼的数量,第一天他捕捞了50条鱼做好标记,然后全放回池塘。过了几天带标记的鱼完全混合于鱼群中,他又去捕捞了168条,发现做标记的鱼有8条。帮老李估算一下池塘里的鱼…...
docker中安装rabbitMq并配置启动
目录 1. 拉取镜像并安装(此处实例安装的是最新版)2.查看docker中已安装的镜像和版本3.启动RabbitMq4.配置管理端5.安装完成 1. 拉取镜像并安装(此处实例安装的是最新版) docker pull rabbitmq2.查看docker中已安装的镜像和版本 …...

viewfs://为Hadoop 中的一个特殊文件系统
解释 viewfs:// 是 Hadoop 中的一个特殊文件系统 URI,用于访问 Hadoop 的视图文件系统(ViewFS)。 ViewFS 是 Hadoop 提供的一种虚拟文件系统,它可以将来自多个底层文件系统的文件统一管理和访问。 通过 ViewFS,你可…...
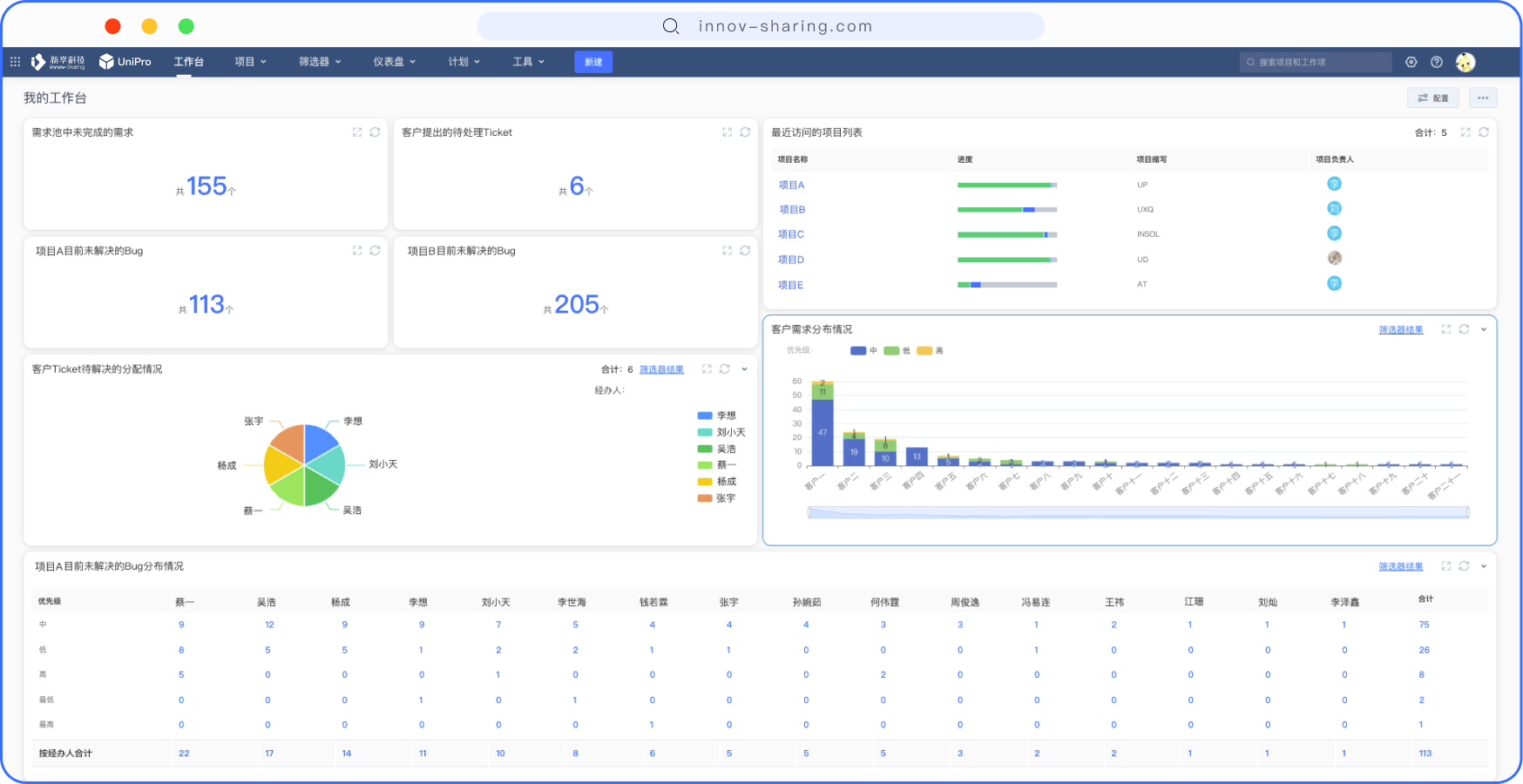
UniPro自定义个人专属工作台 大幅提升工作效率
很多研发团队在开完每日站会后,工程师的工作习惯便是打开研发管理系统,先看看自己的待办事项,或是查看同事的需求、评论,亦或是查看今日份工作的高优先级项等等。 如何方便工程师能够快速查看和了解一天的工作究竟从哪开始呢&…...
python调用飞书机器人发送文件
当前飞书webhook机器人还不支持发送文件类型的群消息,可以申请创建一个机器人应用来实现群发送文件消息。 创建机器人后,需要开通一系列权限,然后发布。由管理员审核通过后,才可使用。 包括如下的权限,可以获取群的c…...
【产品应用】一体化伺服电机在焊接设备中的应用
随着制造业的不断发展,焊接设备在许多领域都得到了广泛应用,如汽车制造、机械加工、钢结构等领域。为了提高焊接设备的性能和效率,许多厂家开始采用一体化伺服电机作为焊接设备的主要驱动部件。本文将介绍一体化伺服电机在焊接设备中的应用背…...

uni+vue3+firstUI——组件弹框使用 v-model绑定参数
说明 将框架弹框组件 封装成子组件,在页面中引用该子组件,传参并控制弹框显示与隐藏。 子组件 <template><view><wh-modal :show"showPopup" :descr"descr" maskClosable click"onClick" :buttons"…...

AI工程化落地的五大技术坐标:Agent、MoE、端云协同与可观测性
1. 这份AI周刊到底在讲什么?一个从业十年的观察者视角你点开这份标题叫《This AI newsletter is all you need #91》的邮件,第一反应可能是:又一份信息过载的AI速报?别急,先放下“刷完就忘”的惯性。作为一个从2014年就…...

超参数调优效率提升300%:Advisor与传统调参工具深度对比
超参数调优效率提升300%:Advisor与传统调参工具深度对比 【免费下载链接】advisor Open-source implementation of Google Vizier for hyper parameters tuning 项目地址: https://gitcode.com/gh_mirrors/ad/advisor 在机器学习模型开发中,超参数…...

内存计算技术如何优化基因组分析性能与能效
1. 内存计算技术如何重塑基因组分析格局在生物信息学领域,我们正面临着一个关键矛盾:一方面,随着测序技术的进步,基因组数据正以每年翻倍的速度增长;另一方面,传统计算架构的能效瓶颈日益凸显。我曾参与过一…...

免费开源神器:SMUDebugTool让你轻松掌控AMD Ryzen处理器的秘密
免费开源神器:SMUDebugTool让你轻松掌控AMD Ryzen处理器的秘密 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: ht…...

魔兽争霸III终极优化工具:解决宽屏拉伸与高帧率限制的完整指南
魔兽争霸III终极优化工具:解决宽屏拉伸与高帧率限制的完整指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为经典游戏《魔兽争霸I…...

28 岁大专学历顺利转行网安 过来人 8 条避坑经验心得
网络安全行业 “人才缺口 300 万 、平均年薪超 25 万” 的红利,让无数职场人动了转行心思。尤其是学历普通(如大专)的群体,既面临原有岗位的天花板,又渴望通过技术转型实现薪资跃迁。但网安行业看似门槛低,…...

python政府集中采购管理系统设计与实现
目录同行可拿货,招校园代理 ,本人源头供货商项目背景核心功能模块技术实现要点应用价值项目技术支持获取博主联系方式 源码获取详细视频演示 :同行可合作点击我获取源码->获取博主联系方式->进我个人主页-->同行可拿货,招校园代理 ,本人源头供货商 项目背…...

当99%的作业都是AI写的,大学还剩什么?这届“AI原住民”毕业生的答案亮了!
前言2023年,当ChatGPT横空出世,全球大学生集体迎来一个“作弊神器”——但很快大家发现,它根本不是用来抄作业的,而是重新定义了“学习”本身。这届毕业生有点特殊:他们是人类历史上第一批和生成式AI一起长大的学生&am…...

AI代理运行时基础设施:从上下文溢出到可审计事件日志
1. 这不是新赛道,是 runtime 层的“操作系统时刻”来了你有没有在深夜调试一个跑了三小时的 AI 代理,突然发现它开始胡言乱语?不是模型崩了,不是 prompt 写错了,而是——它的“记忆”被挤掉了。上下文窗口就那么大&…...

从 0 到 1:用魔珐星云打造真实可用的智能健身私教【技术原理文章】
> 我在学习具身智能的实战文章,本文为技术文章,非广告一、健身交互痛点:传统数字人 / 健身工具缺失沉浸式陪伴式互动日常健身长期存在行业共性痛点:不管是纯视频课程,还是传统云端实时交互数字人,都难以…...