Android笔记(十):结合Navigation组件实现Compose界面的导航
在Android笔记(七)搭建Android JetPack Compose组件中Scaffold脚手架 一文中通过定义一个导航的函数来实现不同界面的切换。如果没有传递任何参数,这样的导航处理也是可以接受的,处理方式也非常简单。但是,如果考虑到不同Compose界面的切换且传递参数,或者有更复杂地处理情况,就可以考虑使用导航组件Navigation来实现。
一、导航组件的配置
新建一个项目模块,在模块对应的build.gradle.kt中中增加依赖:
implementation(“androidx.navigation:navigation-compose:2.7.4”)
注意:采用2.7.4版本,必须设置android的目标SDK和编译SDK为34版本
在本笔记中通过一个展示机器人相关信息来说明导航组件的实现。为此,分别定义实体类和不同的界面。
二、定义机器人实体类
@Parcelize
data class Robot(val name:String,val description:String,val icon:Int):Parcelable
三、定义要显示的主要界面
1.定义机器人列表界面

图1 显示机器人列表
(1)定义单独一行机器人卡片
注意:
因为使用了ConstraintLayout布局,需要在项目模块的build.gradle.kt中增加依赖:
implementation(“androidx.constraintlayout:constraintlayout-compose:1.0.1”)
具体的代码如下:
//定义单独的机器人单独一行的卡片
@Composable
fun RobotCard(robot:Robot){Card(modifier = Modifier.fillMaxWidth().wrapContentHeight().padding(5.dp),colors = CardDefaults.elevatedCardColors(contentColor = Color.Green, containerColor = Color.Blue),elevation = CardDefaults.elevatedCardElevation(defaultElevation = 3.dp)){ConstraintLayout(modifier= Modifier.fillMaxWidth()) {val (imageRef,nameRef,descRef) = remember{createRefs()}val vguideLine = createGuidelineFromStart(0.3f)val hguideLine = createGuidelineFromTop(0.4f)Image(modifier= Modifier.constrainAs(imageRef) {top.linkTo(parent.top)bottom.linkTo(parent.bottom)start.linkTo(parent.start)end.linkTo(vguideLine)}.clickable {},painter = painterResource(id = robot.icon), contentDescription = robot.name )Text(modifier = Modifier.constrainAs(nameRef){top.linkTo(parent.top)bottom.linkTo(hguideLine)start.linkTo(vguideLine)end.linkTo(parent.end)},text = robot.name,fontSize = 18.sp)Text(modifier = Modifier.constrainAs(descRef){top.linkTo(hguideLine)bottom.linkTo(parent.bottom)start.linkTo(vguideLine)end.linkTo(parent.end)},text = robot.description,fontSize = 20.sp)}}
}
(2)定义组合多个机器人卡片生成机器人列表界面
@Preview
@Composable
fun RobotListScreen(){val robots = mutableListOf<Robot>()for(i in 1..10)robots.add(Robot("机器人${i}号","机器人${i}号的世界",android.R.mipmap.sym_def_app_icon))LazyColumn{items(robots){robot:Robot->RobotCard(robot)}}
}
2.定义机器人单独显示界面
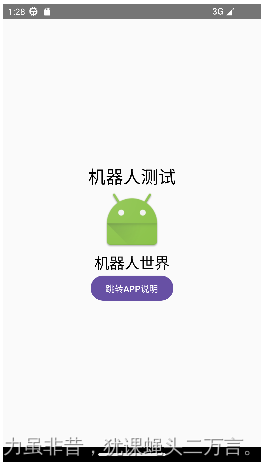
图2
@Composable
fun RobotDetailScreen(){val robot = Robot("机器人测试","机器人世界",android.R.mipmap.sym_def_app_icon)Box(contentAlignment = Alignment.Center,modifier= Modifier.fillMaxSize()){Column(horizontalAlignment = Alignment.CenterHorizontally){Text(robot.name,fontSize = 28.sp)Image(modifier = Modifier.size(100.dp,100.dp),painter = painterResource(id = robot.icon),contentDescription = robot.name)Text(robot.description,fontSize=24.sp,maxLines = 5)Button(onClick = {}){Text("跳转APP说明")}}}
}
3.定义应用介绍界面
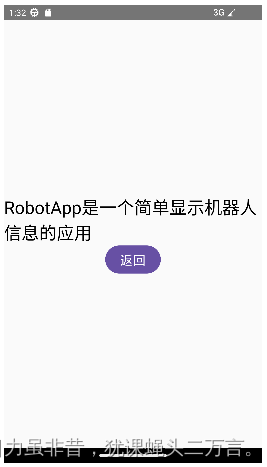
图3
@Composable
fun RobotAppScreen(){Box(contentAlignment = Alignment.Center,modifier = Modifier.fillMaxSize()){Column(modifier = Modifier.fillMaxWidth(),horizontalAlignment = Alignment.CenterHorizontally){Text("RobotApp是一个简单显示机器人信息的应用",fontSize = 28.sp, maxLines = 5)Button(modifier = Modifier.wrapContentSize(),onClick = {}){Text("返回",fontSize = 20.sp)}}}
}
四.定义界面的密封类
定义关于界面的密封类,在密封类对上述的三个界面基本特征如导航路径route、导航使用的标题title以及导航使用的图表icon进行分别定义,代码如下所示:
sealed class Screen(val route:String,val title:String,val icon: ImageVector){object RobotListPage:Screen(route="robotlist",title="机器人列表",icon= Icons.Filled.List)object RobotPage:Screen(route = "robot",title="机器人",icon = Icons.Filled.Face)object AppPage:Screen(route="aboutApp",title = "APP介绍",icon = Icons.Filled.Info)
}
在此前提的基础上,定义一个列表,将三个核心显示的界面定义在列表中,如下所示:
val screens = listOf(Screen.RobotListPage,Screen.RobotPage,Screen.AppPage)
五、定义导航图
在导航图中需要确定导航图中宿主和要切换的界面。要让定义好的导航图发挥作用
(1)需要在活动中指定导航宿主NavHost,通过指定NavHost表示导航宿主,用于定义用户界面的屏幕目标的预留位置;
(2) 需要利用NavController导航控件实现导航。
val navController = rememberNavController()
值得注意的是:NavController可以调用navigate()函数来实现导航,常见有三种形式:
//在导航到route的目的地之前,要将路径home之前所有的内容退出后退堆栈
navController.navigate(“route”){
popUpTo(“home”)
}
//在导航到route的目的地之前,要将包括路径home之前所有的内容退出后退堆栈
navController.navigate(“route”){
popUpTo(“home”) {inclusive = true}
}
//当没有导航到route时,才导航到route路径后退堆栈只有一个route导航路径
navController.navigate(“route”){
launchSingleTop = true
}
在下列定义了一个简单的导航图,代码如下:
@Composable
fun NavigationGraphScreen(navController:NavHostController,startDestination:String){NavHost(navController = navController,startDestination=Screen.RobotListPage.route){composable(Screen.RobotListPage.route){RobotListScreen()}composable(Screen.RobotPage.route){RobotDetailScreen()}composable(Screen.AppPage.route){RobotAppScreen()}}
}
六、在脚手架结构的底部导航栏中使用导航图

@OptIn(ExperimentalMaterial3Api::class)
@Composable
fun MainScreen(){val currentScreen: MutableState<Screen> = remember{mutableStateOf(Screen.RobotListPage)}val navController = rememberNavController()Scaffold(topBar={TopAppBar(title = {Text(text = currentScreen.value.title )},navigationIcon = {Icon(imageVector = currentScreen.value.icon,contentDescription = null)})},bottomBar = {BottomAppBar {screens.forEach {screen:Screen->NavigationBarItem(selected = screen.route == currentScreen.value.route ,onClick = {currentScreen.value = screennavController.navigate(screen.route){popUpTo(Screen.RobotListPage.route)launchSingleTop}},icon = {Icon(imageVector = screen.icon,contentDescription = screen.title)})}}},content={it:PaddingValues->Box(modifier = Modifier.padding(it)){NavigationGraphScreen(navController = navController,startDestination =Screen.RobotListPage.route )}})
}
注意:
(1)导航navController.navigate(screen.route)中设置popUpTo(Screen.RobotListPage.route),表示导航到screen.route的界面会将Screen.RobotListPage.route之前(不包含)的所有其他界面退出返回堆栈BackStack。可以观察到,通过底部导航栏,如上图依次从左到右访问三个界面,在最后一个界面APP介绍界面时,选择手机模拟器的Back键,会直接返回第一个界面RobotListPage.route路径指向的界面。
(2)在脚手架Scaffold的content属性设置核心显示内容为导航图NavigationGraphScreen
七、实现导航传递参数
在上述的运行效果中,可以发现如下不足:
从机器人列表Screen.RobotListPage.route跳转到单个机器人界面Screen.RobotPage.route路径时,只能固定的显示机器人测试信息,显然不合实际情况;
解决之道:就是在不同导航中设置参数传递。
(1)发送方:
navController.navigate(“route/${参数}”)
(2)数据接受方:
在导航图中指定接受参数名和参数类型composable(route = "route/{参数名}",arguments = listOf(arguments = listOf(navArgument(“参数名"){type =NavType.StringType})){val data = it.arguments?.getString(“参数名”)?:"默认值"}
在传递数据如果是基本数据类型比较容易,但是对于自定义的数据类,则可以采用转换的方式实现数据传递:
(1)数据发送方,把自定义类型的对象通过Gson库转换成字符串;
(2)数据接受方,将接受的数据字符串通过Gson库再转换成自定义类型的对象
为了使用Gson库,需要在模块的build.gradle.kt中增加依赖,如下所示:
implementation(“com.google.code.gson:gson:2.10.1”)
1.数据发送方
将机器人列表界面RobotListScreen作为数据的发送方,每次点击列表的图标,则传递数据到下一个界面RobotDetailScreen;由于点击实际的图标定义在RobotCard组合项中,因此,为RobotCard定义的图片内容增加一个点击处理的功能;因为要实现导航,因此RobotListScreen和RobotCard都需要传递NavController参数,下面是修改的代码:
@Composable
fun RobotCard(navController:NavController,robot:Robot){Card(modifier = Modifier.fillMaxWidth().wrapContentHeight().padding(5.dp),colors = CardDefaults.elevatedCardColors(contentColor = Color.Green, containerColor = Color.Blue),elevation = CardDefaults.elevatedCardElevation(defaultElevation = 3.dp)){ConstraintLayout(modifier= Modifier.fillMaxWidth()) {val (imageRef,nameRef,descRef) = remember{createRefs()}val vguideLine = createGuidelineFromStart(0.3f)val hguideLine = createGuidelineFromTop(0.4f)Image(modifier= Modifier.constrainAs(imageRef) {top.linkTo(parent.top)bottom.linkTo(parent.bottom)start.linkTo(parent.start)end.linkTo(vguideLine)}.clickable {val robotStr = Gson().toJson(robot)navController.navigate(Screen.RobotPage.route+"/${robotStr}")},painter = painterResource(id = robot.icon), contentDescription = robot.name )Text(modifier = Modifier.constrainAs(nameRef){top.linkTo(parent.top)bottom.linkTo(hguideLine)start.linkTo(vguideLine)end.linkTo(parent.end)},text = robot.name,fontSize = 18.sp)Text(modifier = Modifier.constrainAs(descRef){top.linkTo(hguideLine)bottom.linkTo(parent.bottom)start.linkTo(vguideLine)end.linkTo(parent.end)},text = robot.description,fontSize = 20.sp)}}
}
@Composable
fun RobotListScreen(navController: NavController){val robots = mutableListOf<Robot>()for(i in 1..10)robots.add(Robot("机器人${i}号","机器人${i}号的世界",android.R.mipmap.sym_def_app_icon))LazyColumn{items(robots){robot:Robot->RobotCard(navController,robot)}}
}
2.数据接受方
在这个应用中RobotDetailScreen是数据的接受方,因此需要修改导航图,在导航图中增加接受数据的处理,代码如下:
@Composable
fun NavigationGraphScreen(navController:NavHostController,startDestination:String){NavHost(navController = navController,startDestination=Screen.RobotListPage.route){composable(Screen.RobotListPage.route){RobotListScreen(navController = navController)}composable(Screen.RobotPage.route+"/{robot}", arguments = listOf(navArgument("robot"){type = NavType.StringType})){val robotStr = it.arguments?.getString("robot")val robot = Gson().fromJson(robotStr,Robot::class.java)RobotDetailScreen(robot)}composable(Screen.AppPage.route){RobotAppScreen()}}
}
相应的RobotDetailScreen也需要修改,增加一个Robot参数,可以对具体的Robot对象进行显示,代码修改如下:
@Composable
fun RobotDetailScreen(robot:Robot){Box(contentAlignment = Alignment.Center,modifier= Modifier.fillMaxSize()){Column(horizontalAlignment = Alignment.CenterHorizontally){Text(robot.name,fontSize = 28.sp)Image(modifier = Modifier.size(100.dp,100.dp),painter = painterResource(id = robot.icon),contentDescription = robot.name)Text(robot.description,fontSize=24.sp,maxLines = 5)Button(onClick = {}){Text("跳转APP说明")}}}
}
3.调整底部栏导航处理
因为增加了数据发送和接受的处理,相应的针对脚手架的底部栏导航的处理也需要调整,需要增加发送和接受数据的处理:
@OptIn(ExperimentalMaterial3Api::class)
@Composable
fun MainScreen(){val currentScreen: MutableState<Screen> = remember{mutableStateOf(Screen.RobotListPage)}val currentRobot:MutableState<Robot> = remember{mutableStateOf(Robot("机器人${1}号","机器人${1}号的世界",android.R.mipmap.sym_def_app_icon))}val navController = rememberNavController()Scaffold(topBar={TopAppBar(title = {Text(text = currentScreen.value.title )},navigationIcon = {Icon(imageVector = currentScreen.value.icon,contentDescription = null)})},bottomBar = {BottomAppBar {screens.forEach {screen:Screen->NavigationBarItem(selected = screen.route == currentScreen.value.route ,onClick = {currentScreen.value = screenif(screen.route == Screen.RobotPage.route){val robotStr = Gson().toJson(currentRobot.value)navController.navigate(Screen.RobotPage.route+"/${robotStr}"){popUpTo(Screen.RobotListPage.route)}}else {navController.navigate(screen.route) {popUpTo(Screen.RobotListPage.route)launchSingleTop}}},icon = {Icon(imageVector = screen.icon,contentDescription = screen.title)})}}},content={it:PaddingValues->Box(modifier = Modifier.padding(it)){NavigationGraphScreen(navController = navController,startDestination =Screen.RobotListPage.route )}})
}
在MainScreen中增加判断是否跳转到RobotDetailScreen界面路径的判断,如果是,就增加参数传递的处理。在上述代码中,增加了一个状态currentRobot来记住当前要显示的机器人对象。这里的处理并不是非常好,因为并没有提供处理修改currentRobot的状态值的操作。最好的方式,是将这个状态值提升,并通过机器人列表界面点击图片达到修改这个状态值的目的。在此处,就不再修改了,由读者自行调整。
相关文章:
Android笔记(十):结合Navigation组件实现Compose界面的导航
在Android笔记(七)搭建Android JetPack Compose组件中Scaffold脚手架 一文中通过定义一个导航的函数来实现不同界面的切换。如果没有传递任何参数,这样的导航处理也是可以接受的,处理方式也非常简单。但是,如果考虑到不…...

linux内核tcp配置--断网后连接卡住
通过隐藏通信应用程序中的临时网络中断,TCP 可以在偶尔不可靠的网络上提供可靠的通信。在通知发件人任何问题之前,您的操作系统将多次重发丢失的消息。大多数 Linux 发行版默认将任何丢失的数据包重传 15 次。重新传输以指数方式回退,因此这 …...
Apache Pulsar 在腾讯云上的最佳实践
导语 由 StreamNative 主办的 Pulsar Meetup Beijing 2023 在2023年10月14日完美落幕,本次活动大咖云集,来自腾讯、滴滴、华为、智联招聘、RisingWave 和 StreamNative 的行业专家们一起,深入探讨 Pulsar 在生产环境中的最佳应用实践&#x…...
VMware 虚拟机安装 CentOS 7
CentOS 7 1. 下载CentOS 7 iso镜像 Index of /centos/7.9.2009/isos/x86_64/ 2. Vmware安装CentOS 7 安装教程: 超详细VMware CentOS7(最小安装)安装教程_虚拟机最小化安装-CSDN博客 【精选】VMware 安装 Centos7 详细过程_vm虚拟机安装centos7_expectation Fu…...

UnityAI——个体AI角色的操控行为脚本
注:本文用到了前文所用的基类UnityAI——操控行为编程的主要基类-CSDN博客 在一些游戏中,可能会遇到想让AI角色追逐或者避开玩家的情况。 如在飞机模拟游戏中,让导弹跟踪和进攻玩家或玩家的飞行器。这种情况下,可以运用本节介绍…...
ssh登录界面变成vim提示,进不去系统
是ubuntu系统 使用远程连接root,进去后发现界面变成vim编辑器的介绍界面了 使用普通用户登录 查询用户的登录shell是不是有问题 sudo vim /etc/passwd 发现用户shell变成了vim编辑器 修改为/bin/bash就可以正常登录了 重新登录测试就正常了...
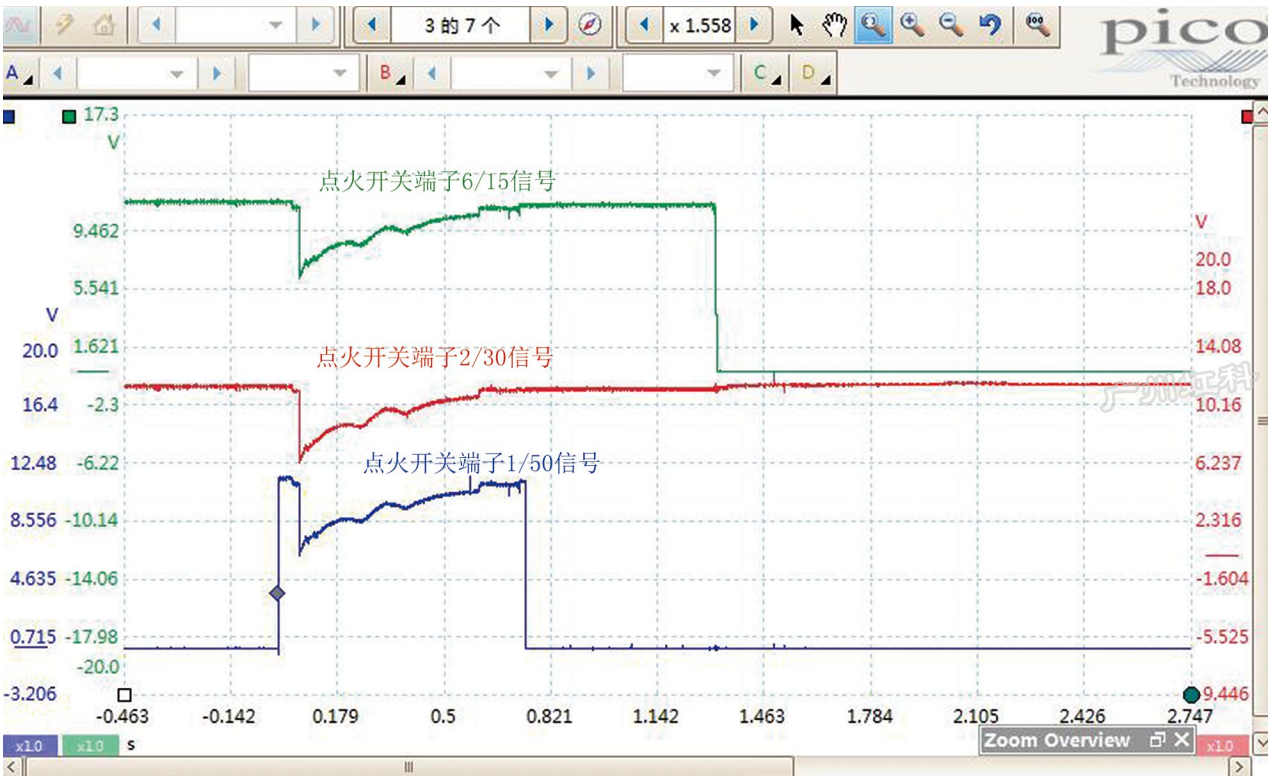
虹科示波器 | 汽车免拆检修 | 2012 款上汽大众帕萨特车 发动机偶尔无法起动
一、故障现象 一辆2012款上汽大众帕萨特车,搭载CFB发动机,累计行驶里程约为12万km。车主反映,将点火开关置于起动挡,偶尔只能听到“咔哒”一声,起动机没有反应,类似蓄电池亏电时起动发动机的现象。为此&…...
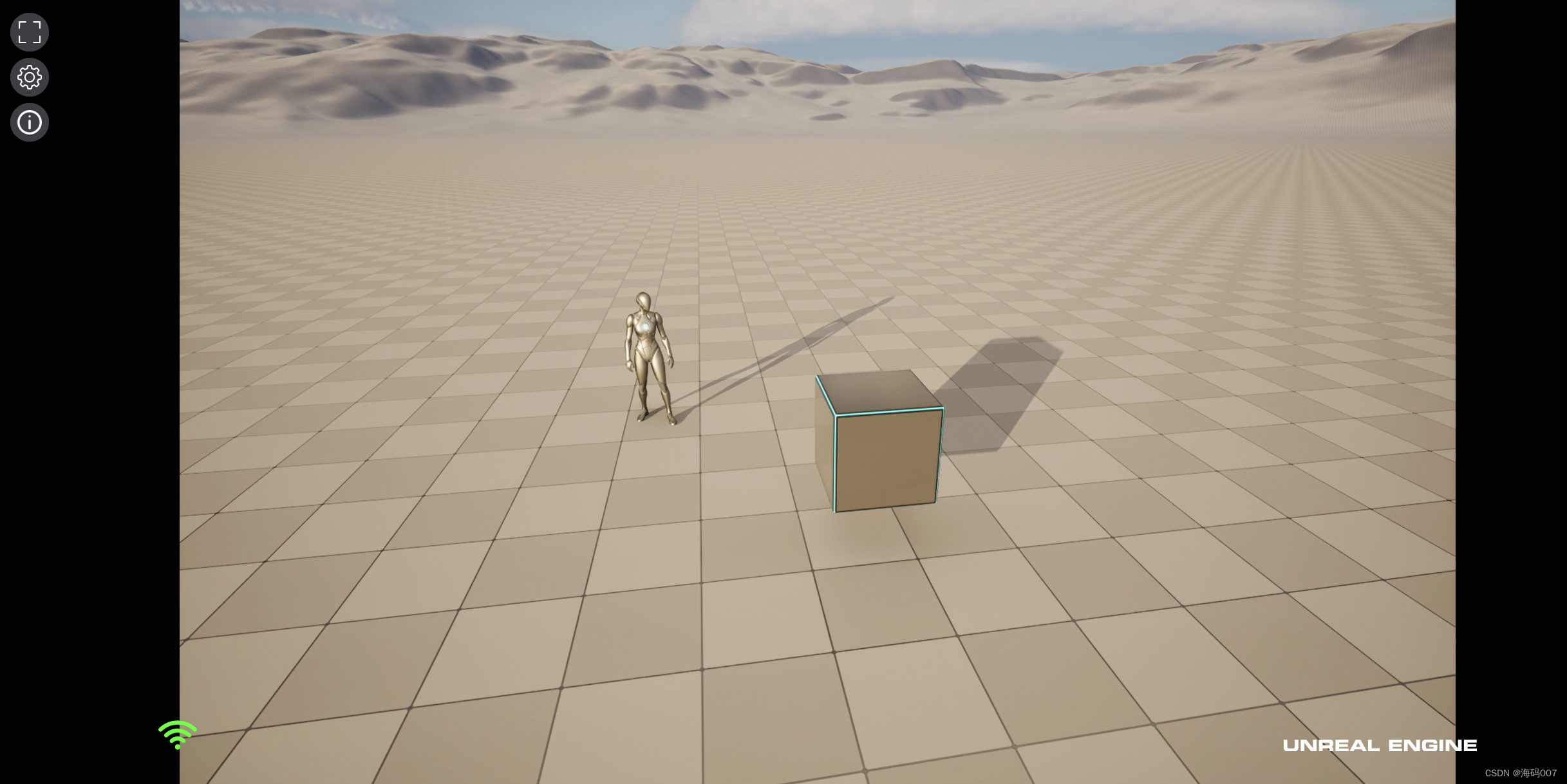
UE5.0.3版本 像素流送 Pixel Streaming
目录 0 引言1 准备工作1.1 下载Node.js1.2 下载 PixelStreaming(非必须) 2 快速入门2.1 打包工程2.2 启动信令服务器2.3 启动工程2.4 打开网页 3 总结 🙋♂️ 作者:海码007📜 专栏:UE虚幻引擎专栏&#x…...
BetterDisplay Pro v1.4.15(显示器管理管理软件)
BetterDisplay Pro是一款屏幕显示优化工具,可用于Windows和Mac操作系统。它可以帮助用户调整屏幕的亮度、对比度、色彩等参数,以获得更好的视觉体验。此外,BetterDisplay Pro还提供了一些额外的功能,如屏幕分割、窗口管理、快捷键…...

蓝桥等考C++组别四级006
第一部分:选择题 1、C L4 (20分) 以下选项中,不是逻辑运算符的选项是( )。 A.! B.|| C.&& D.< 正确答案:D 2、C L4 (20分) …...

app开发之后需要做什么
在完成app的开发之后,还有一系列的工作需要进行,以确保app的顺利上线和用户的良好体验。下面将从原理和详细介绍两个方面来介绍app开发之后需要做的工作。 一、原理介绍 1. 测试与调试:在app开发完成后,需要进行全面的测试与调试…...

某汽车金融企业:搭建SDLC安全体系,打造智慧金融服务样本
某汽车金融企业是国内头部汽车金融公司,已经为超过数百万名客户提供专业的汽车金融服务。该公司通过近几年的数字化创新,在提升客户体验、提高管理效率、降低经营成本等方面已具备很强的服务能力,让客户获得更方便、更快捷、更灵活的金融服务…...
)
iOS GCD(Grand Central Dispatch)
iOS 常用有三种线程管理方式,分别是 NSThread、GCD 与 NSOperation,现在我们先来了解一下其中的 GCD 串行与并行针对的是任务队列,而同步与异步,针对的则是线程。 Serial Queue Sync 序列执行同步 Serial Queue Async 序列执…...
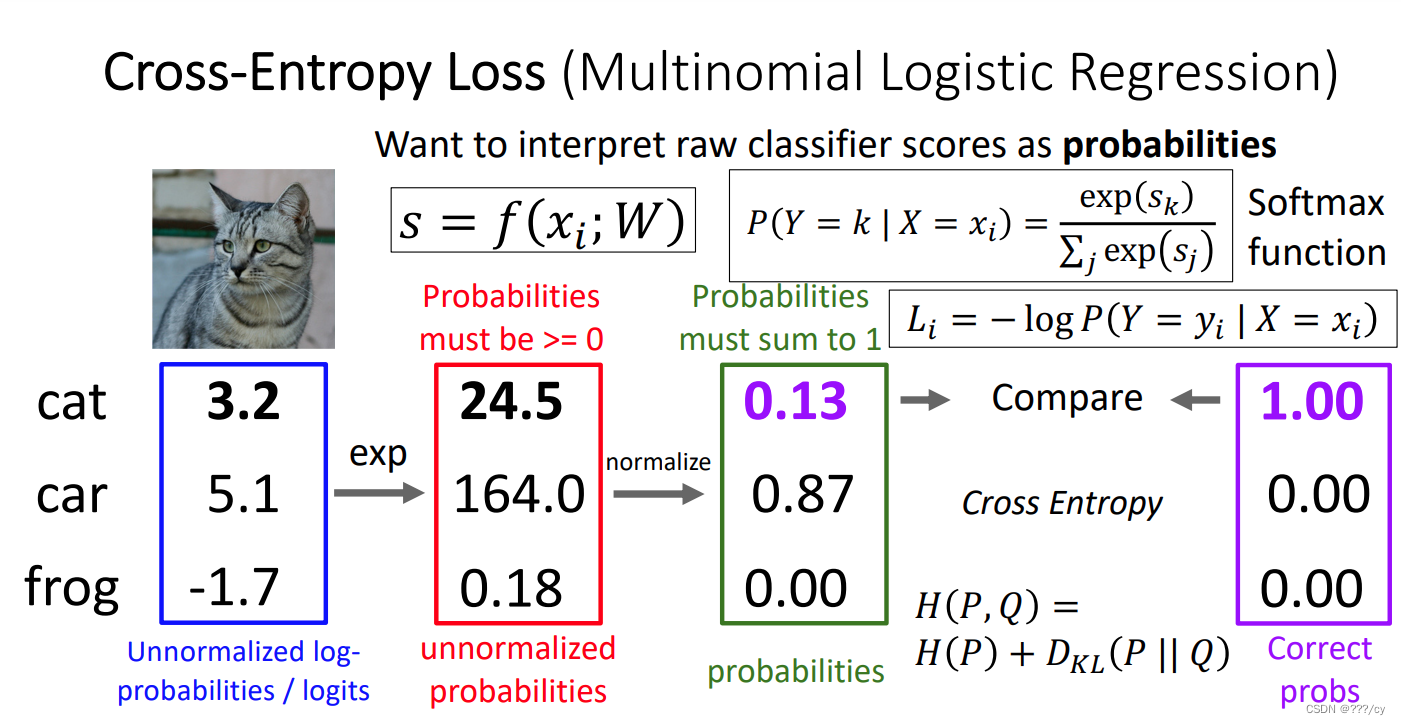
Cross-Entropy Loss(多分类损失函数)
文章目录 1. 网络输出output:score2. Cross-Entropy Loss(多分类损失函数) 1. 网络输出output:score 2. Cross-Entropy Loss(多分类损失函数) 先用softmax function把score 变成 probabilities。再用交叉熵损失函数来进行Loss的计算...

TP858 3BSE018138R1 具有高性能CPU的工业PC技术
TP858 3BSE018138R1 具有高性能CPU的工业PC技术 为了充分利用新电脑的扩展图形功能,如DirectX,Beckhoff Automation重新设计了TwinCAT automation软件套件中的Scope工具。这为TwinCAT用户在灵活的软件环境中提供了一系列令人印象深刻的测量技术。改进的…...
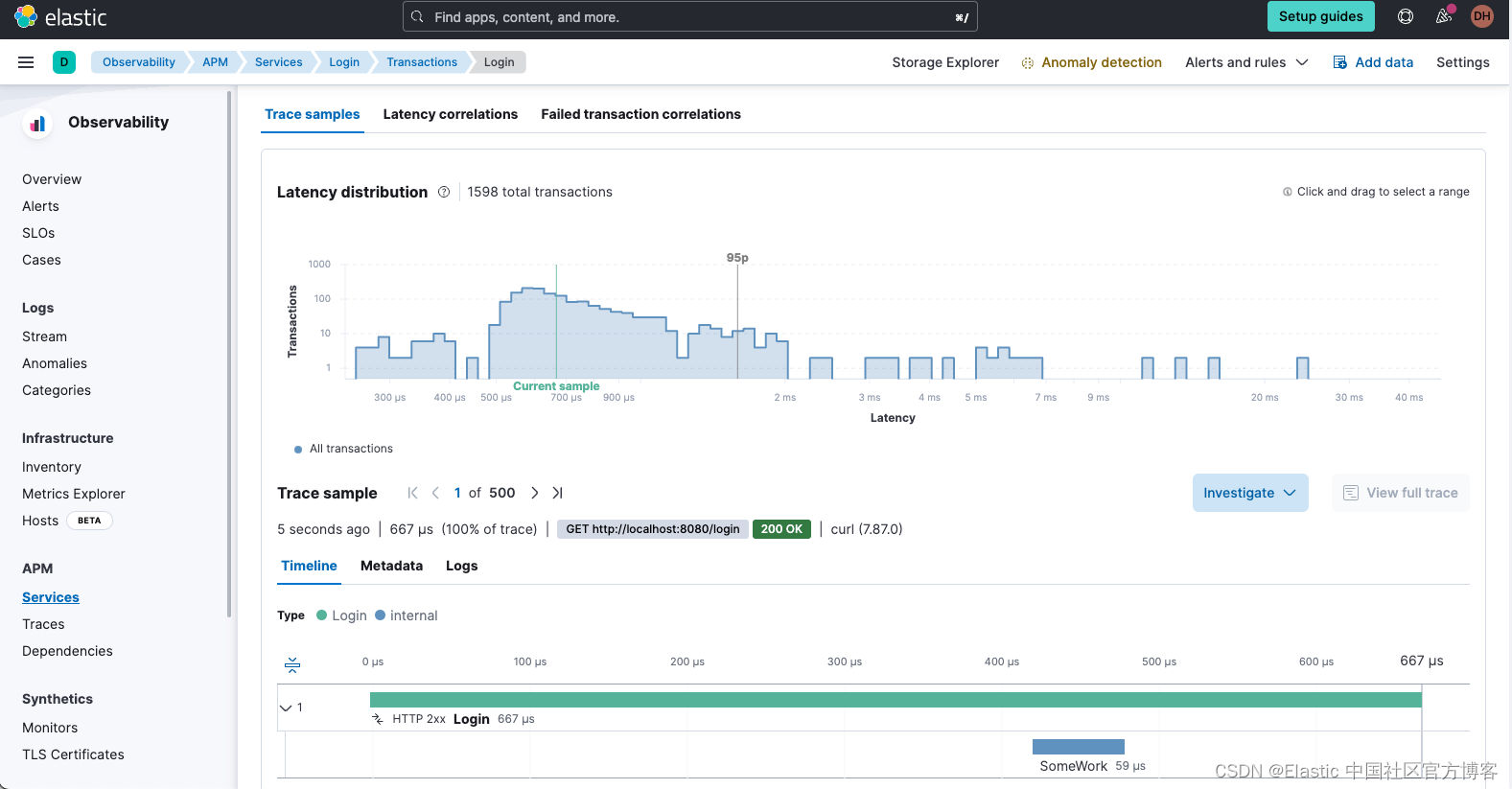
Observability:使用 OpenTelemetry 手动检测 .NET 应用程序
作者:David Hope 在快节奏的软件开发领域,尤其是在云原生领域,DevOps 和 SRE 团队日益成为应用程序稳定性和增长的重要合作伙伴。 DevOps 工程师不断优化软件交付,而 SRE 团队则充当应用程序可靠性、可扩展性和顶级性能的管理者。…...

生产事故:redis主从的坑
一、问题 昨天生产redis缩容,3主3从模式,重启了服务器,重启了redis; 结果今天发现生产服务报错了,连接不上redis。 排查发现,由于生产后台只配置了一个redis的ip,本来是主redis的ip的&#x…...

maven本地仓库有依赖包,还会远程下载的问题
maven本地仓库有依赖包,还会远程下载的问题 传送门...

动作捕捉系统处理单点多点丢点问题
在动作捕捉数据采集过程中,丢点是经常容易遇到的问题。NOKOV度量动作捕捉软件可以方便地解决丢点问题。 一、单点丢点的处理 如下图,已经采集了动捕数据。 查看是否有丢点,在形影软件左上角选择“窗口分割”,在下方分割出一个空…...

FIFO 位宽转换
从8位转32位 module tb_fifo();reg clk,rst; initial beginclk0;forever #4.545 clk~clk; end initial beginrst1;#9.09 rst0; endreg [31:0] cnts; always (posedge clk or posedge rst) beginif(rst)begincnts < 32d0;endelsebegincnts < cnts 1b1;end endreg […...
)
高性价比AI编程神器Claude Code+deepseek v4 pro+vscode——详细安装指南(2026最新版)
一.简介 这套组合性价比极高。关于Claude Code:它由Anthropic公司打造,是直接运行在终端中的AI编程助手,让你不用离开命令行就能完成代码生成、调试、重构、甚至Git提交等各种开发任务。本文将带你完成安装与配置。众所周知Claude 模型集强大…...

从投稿到录用:我是如何用IEEE官方Word模板搞定格式,让审稿人一眼舒服的?
从投稿到录用:我是如何用IEEE官方Word模板搞定格式,让审稿人一眼舒服的? 第一次投稿IEEE期刊时,我花了整整三天时间调整格式——页眉页脚错位、参考文献编号混乱、图表标题忽大忽小。直到收到编辑的退修邮件:"请…...

DeepSeek LeetCode 2509.查询树中环的长度 C语言实现
题目分析这道题的关键在于理解完全二叉树的编号规律:节点 val 的父节点是 val / 2(整数除法)。当在两个节点间添加一条边时,形成的环长度等于两节点到其最近公共祖先(LCA)的路径边数之和,再加 1…...

【GEO实战密码】GEO 的真正护城河,是 RAG
《GEO实战密码》节选:GEO 的真正护城河,是 RAG企业做生成式搜索优化,别只盯着外部曝光。AI 愿不愿意引用你,首先取决于你的内容值不值得被信任。最近和不少企业聊 GEO,也就是生成式搜索优化,发现一个非常典…...

2026年阿里云OpenClaw/Hermes Agent配置Token Plan新手友好流程
2026年阿里云OpenClaw/Hermes Agent配置Token Plan新手友好流程。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼Token Plan兼容主流 AI 工具&…...

轻松健康任命游木聪为CFO
雷递网 乐天 5月20日轻松健康集团(股份代码:2661)日前发布公告,宣布任命游木聪为公司CFO,自2026年5月18日起生效。资料显示,游木聪现年48岁,在财务规划、战略投资及M&A方面具有丰富经验。游…...

2026年AI辅助研发趋势:智能知识问答如何重塑企业知识库的未来?
在2026年的当下,大模型技术已经从最初的"聊天玩具"逐渐渗透到企业级研发的毛细血管中。作为深耕DevOps领域的架构师,我观察到一个显著的变化:企业知识库(Knowledge Base)正在从单纯的"文档存储中心&quo…...

【2025 版】CMD 命令大全|超详细!零基础到精通,一篇封神✅
在Windows操作系统中,命令提示符(CMD)是一个强大的工具,允许用户通过输入命令来执行各种操作。无论是系统管理、网络配置,还是文件管理,CMD都能提供高效的解决方案。 一、基本命令 cd:更改目录…...

Linux运维:Jenkins部署
Jenkins 完整部署流程 一句话总结:Jenkins 是自动化流水线工具,把"代码提交→编译打包→测试→部署上线"全流程自动化,不用人工一步步操作。一、先搞懂核心逻辑 Jenkins 就像一个自动化机器人,你告诉它"代码提交后…...

告别手动摆放!UE5.2+PCG插件:程序化实现枯木生蘑菇、岩石长苔藓的生态细节
UE5.2程序化生态细节:用PCG插件实现枯木生蘑菇的魔法 当游戏场景中的枯木自动长出蘑菇,岩石表面自然覆盖苔藓时,这种生态细节的呈现往往能让虚拟世界瞬间"活"起来。传统手动摆放的方式不仅耗时耗力,更难以实现自然生长的…...