基于梯度算法的无人机航迹规划-附代码
基于梯度算法的无人机航迹规划
文章目录
- 基于梯度算法的无人机航迹规划
- 1.梯度搜索算法
- 2.无人机飞行环境建模
- 3.无人机航迹规划建模
- 4.实验结果
- 4.1地图创建
- 4.2 航迹规划
- 5.参考文献
- 6.Matlab代码
摘要:本文主要介绍利用梯度算法来优化无人机航迹规划。
1.梯度搜索算法
梯度算法原理请参考:https://blog.csdn.net/u011835903/article/details/122156112
2.无人机飞行环境建模
? 环境模型的建立是考验无人机是否可以圆满完成人类所赋予各项任务的基
础和前提,其中第一步便是如何描述规划空间中的障碍物。首先我们将采取函数模拟法模拟地貌特征。其函数表达式为:
z ( x , y ) = s i n ( y + a ) + b s i n ( x ) + c c o s ( d y 2 + x 2 ) + e c o s ( y ) + f s i n ( f y 2 + x 2 ) + g c o s ( y ) (1) z(x,y)=sin(y+a)+bsin(x)+ccos(d\sqrt{y^2+x^2})+ecos(y)+fsin(f\sqrt{y^2+x^2})+gcos(y)\tag{1} z(x,y)=sin(y+a)+bsin(x)+ccos(dy2+x2)+ecos(y)+fsin(fy2+x2)+gcos(y)(1)
其中, ( x , y ) (x, y) (x,y) 为地形上某点投影在水平面上的点坐标, z z z 则为对应点坐标的高度。式中 a , b , c , d , e , f , g a, b, c, d, e, f , g a,b,c,d,e,f,g 是常系数,想要得到不同的地貌特征可以通过改变其常系数的大小,以上建模是作为环境模型的基准地形信息。但为了得到障碍区域我们还需要在这个基准地形上叠加山峰模型,这样就可以模拟像山峰、丘陵等障碍地理信息。山峰模型的数学表达式为:
h ( x , y ) = ∑ i h i e x p [ − ( x − x o i ) 2 a i 2 − ( y − y o i ) 2 b i 2 ] + h o (2) h(x,y)=\sum_ih_iexp[-\frac{(x-x_{oi})^2}{a_i^2}-\frac{(y-y_{oi})^2}{b_i^2}]+h_o \tag{2} h(x,y)=i∑hiexp[−ai2(x−xoi)2−bi2(y−yoi)2]+ho(2)
式 (2)中, h o h_o ho 和 h i h_i hi 分别表示基准地形和第 i i i座山峰的高度, ( x o i , y o i ) (xoi , y oi ) (xoi,yoi)则表示第 i座山峰的中心坐标位置,a i 和 b i 分别是第 i 座山峰沿 x 轴和 y 轴方向的坡度。由式(1)和(2),我们可以得到如下表达式:
Z ( x , y ) = m a x [ z ( x , y ) , h ( x , y ) ] (3) Z(x,y)=max[z(x,y),h(x,y)]\tag{3} Z(x,y)=max[z(x,y),h(x,y)](3)
无人机在躲避障碍物的同时也会经常遇到具有威胁飞行安全的区域,我们称之为威胁区域。这些威胁区域可以是敌人的雷达和防空导弹系统的探测威胁区域也可以是一些其它的威胁,一旦无人机进入这些区域很有可能会被击落或者坠毁。为了简化模型,本文采用半径为 r 的圆柱形区域表示威胁区域,其半径的大小决定威胁区域的覆盖范围。每一个圆柱体的中心位置是对无人机构成最大威胁的地方并向外依次减弱。
3.无人机航迹规划建模
? 在环境建模的基础上,无人机航迹规划需要考虑到在执行复杂任务的过程中自身性能约束要求,合理的设计航迹评价函数才能使得梯度搜索算法得出的最后结果符合要求,并保证规划出的航迹是有效的。考虑到实际环境中,无人机需要不断适应变化的环境。所以在无人机路径规划过程中,最优路径会显得比较复杂,并包含许多不同的特征。基于实际的情况,本文采用较为复杂的航迹评价函数进行无人机路径规划。影响无人机性能的指标主要包括航迹长度、飞行高度、最小步长、转角代价、最大爬升角等。
? 搜索最佳路径通常与搜索最短路径是密不可分的。在无人机航迹规划过程中,航迹的长度对于大多数航迹规划任务来说也是非常重要的。众所周知,较短的路线可以节省更多的燃料和更多的时间并且发现未知威胁的几率会更低。我们一般把路径定义为无人机从起始点到终点所飞行路程的值,设一条完整的航线有 n n n个节点,其中第 i i i个航路点和第 i + 1 i+1 i+1个航路点之间的距离表示为 l i l_i li ,这两个航路点的坐标分别表示为 ( x i , y i , z i ) (x_i,y_i,z_i ) (xi,yi,zi), ( x i + 1 , y i + 1 , z i + 1 ) (x_{i+1}, y_{i+1},z_{i+1}) (xi+1,yi+1,zi+1)并分别记作 g ( i ) g(i) g(i)和 g ( i + 1 ) g(i+1) g(i+1)。航迹需要满足如下条件:
{ l i = ∣ ∣ g ( i + 1 ) − g ( i ) ∣ ∣ 2 L p a t h = ∑ i = 1 n − 1 l i (4) \begin{cases} l_i = ||g(i+1)-g(i)||_2\\ L_{path}=\sum_{i=1}^{n-1}l_i \end{cases}\tag{4} {li=∣∣g(i+1)−g(i)∣∣2Lpath=∑i=1n−1li(4)
在飞行的过程中会遇到障碍物或者进入威胁区域,如果无人机无法躲避障碍物或者飞入了威胁区域将面临被击落或坠毁的危险以至于无法到达终点,记为 L p a t h = ∞ L_{path}=\infty Lpath=∞,但是无穷函数在实际问题中很难表示,我们采用惩罚的方式进行处理。一般情况下,为了利用地形覆盖自身位置,无人机应尽可能降低高度这可以帮助自身避免一些未知雷达等威胁。但是太低的飞行高度同样会加大无人机同山体和地面的撞击几率,因此设定稳定的飞行高度是非常重要的。飞行高度不应该有太大的变化,稳定的飞行高度可以减少控制系统的负担,节省更多的燃料 。为了使无人机飞行更加安全,给出的飞行高度模型:
{ h h e i g h t = 1 n ∑ i = 0 n − 1 ( z ( i ) − z ‾ ) 2 z ‾ = 1 n ∑ i = 0 n − 1 z ( i ) (5) \begin{cases} h_{height}=\sqrt{\frac{1}{n}\sum_{i=0}^{n-1}(z(i)-\overline{z})^2}\\ \overline{z}=\frac{1}{n}\sum_{i=0}^{n-1}z(i) \end{cases}\tag{5} {hheight=n1∑i=0n−1(z(i)−z)2z=n1∑i=0n−1z(i)(5)
无人机的可操作性也受到其转角代价函数的限制。,在飞行过程中无人机的转角应不大于其预先设定的最大转角,转角的大小会影响其飞行的稳定性。本文的研究中,设定最大转角为 Φ Φ Φ,当前转角为 θ \theta θ并且 a i a_i ai是第 i i i段航路段向量。
{ c o s θ = a i T a i + 1 ∣ a i ∣ ∣ a i + 1 ∣ J t u r n = ∑ i = 1 n ( c o s ( Φ − c o s θ ) ) (6) \begin{cases} cos\theta =\frac{a_i^Ta_{i+1}}{|a_i||a_{i+1}|}\\ J_{turn}=\sum_{i=1}^n(cos(\Phi-cos\theta)) \end{cases}\tag{6} {cosθ=∣ai∣∣ai+1∣aiTai+1Jturn=∑i=1n(cos(Φ−cosθ))(6)
其中, ∣ a ∣ |a| ∣a∣代表矢量 a a a的长度。
? 通过对以上三个方面建立了无人机航迹规划的代价函数,可以得出本文的航迹评价函数如下:
J c o s t = w 1 L p a t h + w 2 h h e i g h t + w 3 J t u r n (7) J_{cost}=w_1L_{path}+w_2h_{height}+w_3J_{turn} \tag{7} Jcost=w1Lpath+w2hheight+w3Jturn(7)
其中, J c o s t J_{cost} Jcost是总的代价函数,参数 w i w_i wi , i = 1 , 2 , 3 i=1,2,3 i=1,2,3 表示每个代价函数的权值,且满足如下条件:
{ w i ≥ 0 ∑ i = 1 3 w i = 1 (8) \begin{cases} w_i\geq0 \\ \sum_{i=1}^3 w_i=1 \end{cases} \tag{8} {wi≥0∑i=13wi=1(8)
通过对总的代价函数进行有效地处理,我们可以得到由线段组成的航迹。不可否认的是得到的路径往往是仅在理论上可行,但为了实际可飞,有必要对航迹进行平滑处理。本文采用三次样条插值的方法对路径进行平滑。
4.实验结果
4.1地图创建
设置地图参数a, b, c, d, e, f , g=1。地图大小为:200*200。设置三个山峰,山峰信息如表1所示。威胁区域信息如表2所示
| 信息 | 山峰中心坐标 | 山峰高度 | 山峰X方向坡度 | 山峰y方向坡度 |
|---|---|---|---|---|
| 山峰1 | [60,60] | 50 | 20 | 20 |
| 山峰2 | [100,100] | 60 | 30 | 30 |
| 山峰3 | [150,150] | 80 | 20 | 20 |
| 信息 | 威胁区域中心坐标 | 威胁区域半径 |
|---|---|---|
| 威胁区域1 | [150,50] | 30 |
| 威胁区域2 | [50,150] | 20 |
创建的地图如下:

4.2 航迹规划
设置起点坐标为[0,0,20],终点坐标为[200,200,20]。利用梯度算法对航迹评价函数式(7)进行优化。优化结果如下:


从结果来看,梯度算法规划出了一条比较好的路径,表明算法具有一定的优势。
5.参考文献
[1]薛建凯. 一种新型的群智能优化技术的研究与应用[D].东华大学,2020.DOI:10.27012/d.cnki.gdhuu.2020.000178.
6.Matlab代码
相关文章:
基于梯度算法的无人机航迹规划-附代码
基于梯度算法的无人机航迹规划 文章目录 基于梯度算法的无人机航迹规划1.梯度搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用梯度算法来优化无人机航迹规划。 1.梯度搜索算法 …...

【工具】【IDE】Qt Creator社区版
Qt Creator社区版下载地址:https://download.qt.io/archive/qt/ 参考:https://cloud.tencent.com/developer/article/2084698?areaSource102001.8&traceIduMchNghqp8gWPdFHvSOGg MAC安装并配置Qt(超级简单版) 1.安装brew&…...

王道p18 6.从有序顺序表中删除所有其值重复的元素,使表中所有元素的值均不同(c语言代码实现)
视频讲解在这里:👇 顺序表p18 第6题wd数据结构课后代码题(c语言代码实现)_哔哩哔哩_bilibili 本题代码如下 void deleterepeat(struct sqlist* L) {if (L->length 0)printf("表空");int i 0;int k 0;for (i 1…...

Python入门:6个好用的Python代码,快来收藏!
文章目录 1.类有两个方法,一个是 new,一个是 init,有什么区别,哪个会先执行呢?2.map 函数返回的对象3.正则表达式中 compile 是否多此一举?4.[[1,2],[3,4],[5,6]]一行代码展开该列表,得出[1,2,3,4,5,6]5.一行代码将字符…...
——文件管理)
Linux常用指令(二)——文件管理
Linux文件管理 2.1 创建文件 touch2.2 复制文件 cp2.3 删除文件 rm2.4 移动文件 mv2.5 重命名文件 rename2.6 查看文件 cat2.7 查看文件的类型 file2.8 编辑文件 vim2.9 打印文件内容 cat2.10 变更文件所有者 chown2.11 修改文件权限 chmod 更加完整的Linux常用指令 2.1 创建文…...
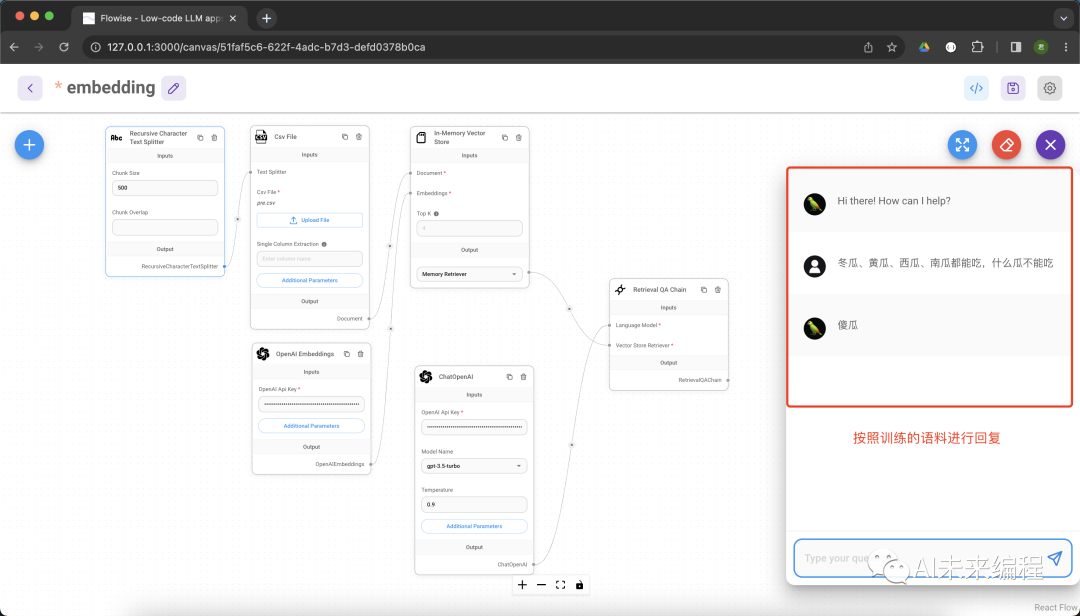
AI开源 - LangChain UI 之 Flowise
原文:AI开源 - LangChain UI 之 Flowise 一、Flowise 简介 Flowise 是一个为 LangChain 设计的用户界面(UI),使得使用 LangChain 变得更加容易(低代码模式)。 通过拖拽可视化的组件,组建工作流,就可以轻…...

java的集合类中哪些可以添加不同类型数据,哪些不可以?
在Java的集合类中,有些可以添加不同类型的数据,而有些则要求元素类型必须一致。以下是一些常见的Java集合类及其对元素类型的要求: 1、ArrayList ArrayList可以添加不同类型的数据,因为它使用了泛型,可以存储任何类型…...
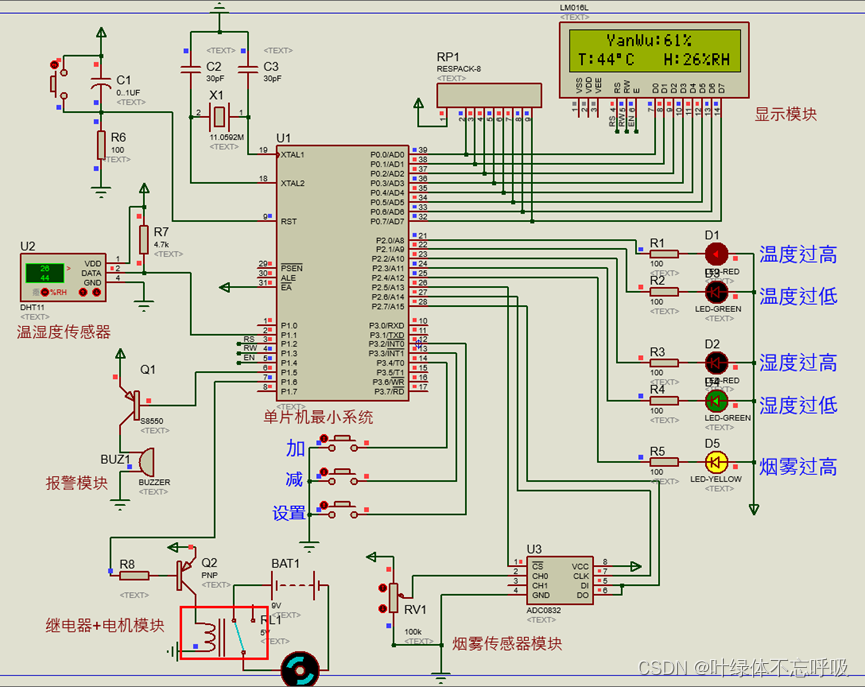
基于51单片机的烟雾和温湿度检测控制系统仿真(智能防火系统,火灾报警灭火系统)
wx供重浩:创享日记 对话框发送:单片机防火 获取完整源码源文件仿真源文件论文报告说明文档等 基于51单片机的光照及温湿度检测报警控制系统 由STC89C52单片机LCD1602液晶显示屏ADC0832模块蜂鸣器DHT11温湿度传感器 烟雾传感器LED按键构成 具体功能&…...
【多线程】静态代理
当使用静态代理模式时,我们会有一个真实的对象(RealSubject),一个代理对象(ProxySubject),代理对象将请求转发给真实对象,并可以在请求前后执行额外的操作。 真实对象和代理对象要实…...
线性代数 第二章 矩阵
一、概念 个数排成的m行n列的表格 二、运算法则 三、初等变换 (1)用非零常数k乘矩阵的某一行(列); (2)互换矩阵某两行(列)的位置; (3&#…...

vue实现自定义字体
1、字体资源查找 网址 https://eng.m.fontke.com/ 选择想要的字体之后下载 获取文件夹内的.ttf文件 2 、字体引入 在项目根目录下新建font文件夹,将ttf文件放在里面 3、相应的页面vue文件中引入 在style标签中加上 font-face { font-family: ‘ZCOOLXiaoWei’…...
Selenium安装WebDriver Chrome驱动(含 116/117/118/119/120/)
1、确认浏览器的版本 在浏览器的地址栏,输入chrome://version/,回车后即可查看到对应版本 2、找到对应的chromedriver版本 2.1 114及之前的版本可以通过点击下载chromedriver,根据版本号(只看大版本)下载对应文件 2.2 116版本…...

springboot的安全机制
一.jwt Spring Boot是一个用于开发Java应用程序的开源框架,它提供了一种快速、简单和可扩展的方式来构建独立的、生产级别的应用程序。在最新的版本Spring Boot 2.5中,引入了对JWT(JSON Web Token)的支持。本文将介绍如何在Spring Boot 2.5中使用JWT,并提供一个简单的示例…...

学习c++的第四天
目录 运算符 算术运算符 关系运算符 逻辑运算符 位运算符 赋值运算符 杂项运算符 运算符优先级 运算符 算术运算符 算术运算符是 C 中用于执行基本算术操作的运算符。 加法运算符 ():将两个操作数相加。例如,A B 将得到 30,因为 …...
BIOS开发笔记 – 显示
UEFI启动流程跑完前三阶段,UEFI环境的准备基本完成,到BDS阶段的任务就是准备引导OS。在此之前还需要使一些必要的硬件工作起来,比如键盘设备,屏幕等,怎么让屏幕工作呢?简单的说就是执行其相关的UEFI驱动。要注意一下的是,这里所说的驱动并不是屏幕的驱动,而是GPU的驱动…...
数据库实验:SQL的数据视图
目录 视图概述视图的概念视图的作用 实验目的实验内容实验要求实验过程 视图概述 视图是由数据库中的一个表或多个表导出的虚拟表,其作用是方便用户对数据的操作 视图的概念 视图是一个虚拟表,其内容由查询定义。同真实的表一样,视图包含一…...

k8s-调度约束
目录 工作机制 调度过程 指定调度节点 亲和性 键值运算关系 Pod亲和性与反亲和性 污点(Taint) 和 容忍(Tolerations) 维护操作 故障排除步骤 Kubernetes 是通过 List-Watch 的机制进行每个组件的协作,保持数据同步的,每个组件之间的设计实现了…...

C++设计模式_26_设计模式总结
本篇为C++设计模式的总结课,此篇再回到原帮助大家梳理一下。 文章目录 1. 一个目标2. 两种手段3. 八大原则4. 重构技法5. 从封装变化角度对模式分类6. C++对象模型7. 关注变化点和稳定点8. 什么时候不用模式9. 经验之谈10. 设计模式成长之路1. 一个目标 管理变化,提高复用!…...

解锁AI语言模型的秘密武器 - 提示工程
文章目录 一、LLM概念1.1 什么是LLMs1.2 LLMs类别1.3 如何构建LLM 二、提示工程简介2.1 基础提示2.2 使用提示词的必要性 三、 提示3.1 如何写好提示词3.1.1 使用分隔符3.1.2 结构化输出3.1.3 风格信息3.1.4 给定条件3.1.5 给出示例3.1.6 步骤分解3.1.7 不断迭代 3.2 提示工程3…...

qt手撕菜单栏
最近有个项目需要手写菜单栏。 就写了一个简单的程序,供大家参考! #include <QApplication> #include <QMainWindow> #include <QMenuBar> #include <QMenu> #include...

Windows Cleaner终极指南:5个技巧让C盘空间瞬间释放
Windows Cleaner终极指南:5个技巧让C盘空间瞬间释放 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款专为Windows系统设计的开源…...

1.8.1 掌握Scala类与对象 - Scala类
本次实战通过两组对比鲜明的案例,带你快速入门Scala面向对象编程的核心。首先,通过创建User类,我们掌握了Scala普通类的定义方式,了解了如何使用private修饰符封装成员变量,以及如何通过new关键字实例化对象并调用其公…...

从零解构:BUUCTF“吹着贝斯扫二维码”中的隐写与编码链
1. 题目背景与核心挑战 第一次看到BUUCTF这道"吹着贝斯扫二维码"的题目时,我盯着那堆杂乱的文件陷入了沉思。这道题完美展现了CTF比赛中典型的"隐写多层编码"组合拳——就像侦探破案需要同时处理物证和密码本。题目给出的初始材料是一个加密的f…...

网盘直链解析工具完整指南:跨平台文件获取解决方案
网盘直链解析工具完整指南:跨平台文件获取解决方案 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘…...

漏洞审计实战:从思维模式到工具协同的代码安全深度剖析
1. 项目概述:从“bug-audit-skill”看漏洞审计的实战化沉淀最近在GitHub上看到一个名为“bug-audit-skill”的项目,作者是abczsl520。这个项目名直译过来就是“漏洞审计技能”,它不像一个具体的工具,更像是一个知识库或经验集。在…...
)
NotebookLM实战指南(NLP任务辅助黄金公式首次公开)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM实战指南(NLP任务辅助黄金公式首次公开) NotebookLM 是 Google 推出的基于可信来源驱动的 AI 助手,专为研究者与工程师设计,其核心能力在于“…...
)
Docker容器化高可用架构部署方案(二)
01-环境准备 本文档详细介绍部署前的环境准备工作,包括操作系统要求、Docker安装、内核参数配置和网络确认。 系统要求 硬件要求 CPU:至少2核心 内存:至少4GB 磁盘:至少40GB可用空间 操作系统 OpenEuler 24.03 SP3 或其他L…...

3分钟掌握Tuna插件:让OBS直播拥有专业级歌曲信息显示功能
3分钟掌握Tuna插件:让OBS直播拥有专业级歌曲信息显示功能 【免费下载链接】tuna Song information plugin for obs-studio 项目地址: https://gitcode.com/gh_mirrors/tuna1/tuna 你是否曾在直播中手动输入正在播放的歌曲信息,或者因为忘记切换歌…...

来勒光电发布双FA自动耦合系统:突破硅光模块封装效率瓶颈
导读:来勒光电推出的双FA自动耦合系统,是一款专为高速光模块TX/RX端量身打造的高精度自动化耦合设备,以独特的双FA同步耦合设计、全流程无人化作业与模块化兼容能力,为800G/1.6T/3.2T光模块的规模化量产提供高效、稳定、智能的封装…...

面试官最爱问的FPGA亚稳态问题,我用这3个真实波形图给你讲透
FPGA亚稳态问题深度解析:从波形图到面试实战 在数字电路设计中,亚稳态(Metastability)是一个无法回避的核心问题。对于准备FPGA相关岗位面试的工程师来说,能否清晰解释亚稳态现象、分析其成因并提出解决方案࿰…...