VX-3R APRS发射试验
VX-3R本身是不带APRS功能的,不过可能通过外加TNC实现APRS功能。
有大佬已经用Arduino实现了相应的发射功能:
https://github.com/handiko/Arduino-APRS
我要做的,就是简单修改一下代码,做一个转接板。
YEASU官方没有给出VX-3R的音频接口四节定义,估计是为了推销自家的CT-44,手册上只有这么一个图

在网上查了一圈,pinguide上有这么个图,然后提了一句“Pinouts for speaker and mic are reversed on the vx-3r”。但是经我实际验证,VX-3R的定义跟网站上是一样的,并没有reversed。
转接板原理图如下:

实物图如下:

值得注意的是,VX-3R的PTT是低电平发射。
完整的代码如下:
/** Copyright (C) 2018 - Handiko Gesang - www.github.com/handiko* * This program is free software: you can redistribute it and/or modify* it under the terms of the GNU General Public License as published by* the Free Software Foundation, either version 3 of the License, or* (at your option) any later version.* * This program is distributed in the hope that it will be useful,* but WITHOUT ANY WARRANTY; without even the implied warranty of* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the* GNU General Public License for more details.* * You should have received a copy of the GNU General Public License* along with this program. If not, see <https://www.gnu.org/licenses/>.*/
#include <math.h>
#include <stdio.h>// Defines the Square Wave Output Pin
#define OUT_PIN 2#define _1200 1
#define _2400 0#define _FLAG 0x7e
#define _CTRL_ID 0x03
#define _PID 0xf0
#define _DT_EXP ','
#define _DT_STATUS '>'
#define _DT_POS '!'#define _NORMAL 1
#define _BEACON 2#define _FIXPOS 1
#define _STATUS 2
#define _FIXPOS_STATUS 3#define _PTT 5bool nada = _2400;/** SQUARE WAVE SIGNAL GENERATION* * baud_adj lets you to adjust or fine tune overall baud rate* by simultaneously adjust the 1200 Hz and 2400 Hz tone,* so that both tone would scales synchronously.* adj_1200 determined the 1200 hz tone adjustment.* tc1200 is the half of the 1200 Hz signal periods.* * ------------------------- -------* | | |* | | |* | | |* ---- -------------------------* * |<------ tc1200 --------->|<------ tc1200 --------->|* * adj_2400 determined the 2400 hz tone adjustment.* tc2400 is the half of the 2400 Hz signal periods.* * ------------ ------------ -------* | | | | |* | | | | | * | | | | |* ---- ------------ ------------* * |<--tc2400-->|<--tc2400-->|<--tc2400-->|<--tc2400-->|* */
const float baud_adj = 0.975;
const float adj_1200 = 1.0 * baud_adj;
const float adj_2400 = 1.0 * baud_adj;
unsigned int tc1200 = (unsigned int)(0.5 * adj_1200 * 1000000.0 / 1200.0);
unsigned int tc2400 = (unsigned int)(0.5 * adj_2400 * 1000000.0 / 2400.0);/** This strings will be used to generate AFSK signals, over and over again.*/
const char *mycall = "BG7GF";
char myssid = 7;const char *dest = "APRS";
const char *dest_beacon = "BEACON";const char *digi = "WIDE2";
char digissid = 1;const char *mystatus = "Hello World, This is a simple Arduino APRS Transmitter !";const char *lat = "28XX.09N";
const char *lon = "112XX.62E";
const char sym_ovl = 'H';
const char sym_tab = 'a';unsigned int tx_delay = 5000;
unsigned int str_len = 400;char bit_stuff = 0;
unsigned short crc=0xffff;/** */
void set_nada_1200(void);
void set_nada_2400(void);
void set_nada(bool nada);void send_char_NRZI(unsigned char in_byte, bool enBitStuff);
void send_string_len(const char *in_string, int len);void calc_crc(bool in_bit);
void send_crc(void);void send_packet(char packet_type, char dest_type);
void send_flag(unsigned char flag_len);
void send_header(char msg_type);
void send_payload(char type);void set_io(void);
void print_code_version(void);
void print_debug(char type, char dest_type);/** */
void set_nada_1200(void)
{digitalWrite(OUT_PIN, HIGH);delayMicroseconds(tc1200);digitalWrite(OUT_PIN, LOW);delayMicroseconds(tc1200);
}void set_nada_2400(void)
{digitalWrite(OUT_PIN, HIGH);delayMicroseconds(tc2400);digitalWrite(OUT_PIN, LOW);delayMicroseconds(tc2400);digitalWrite(OUT_PIN, HIGH);delayMicroseconds(tc2400);digitalWrite(OUT_PIN, LOW);delayMicroseconds(tc2400);
}void set_nada(bool nada)
{if(nada)set_nada_1200();elseset_nada_2400();
}/** This function will calculate CRC-16 CCITT for the FCS (Frame Check Sequence)* as required for the HDLC frame validity check.* * Using 0x1021 as polynomial generator. The CRC registers are initialized with* 0xFFFF*/
void calc_crc(bool in_bit)
{unsigned short xor_in;xor_in = crc ^ in_bit;crc >>= 1;if(xor_in & 0x01)crc ^= 0x8408;
}void send_crc(void)
{unsigned char crc_lo = crc ^ 0xff;unsigned char crc_hi = (crc >> 8) ^ 0xff;send_char_NRZI(crc_lo, HIGH);send_char_NRZI(crc_hi, HIGH);
}void send_header(char msg_type)
{char temp;/** APRS AX.25 Header * ........................................................* | DEST | SOURCE | DIGI | CTRL FLD | PID |* --------------------------------------------------------* | 7 bytes | 7 bytes | 7 bytes | 0x03 | 0xf0 |* --------------------------------------------------------* * DEST : 6 byte "callsign" + 1 byte ssid* SOURCE : 6 byte your callsign + 1 byte ssid* DIGI : 6 byte "digi callsign" + 1 byte ssid* * ALL DEST, SOURCE, & DIGI are left shifted 1 bit, ASCII format.* DIGI ssid is left shifted 1 bit + 1* * CTRL FLD is 0x03 and not shifted.* PID is 0xf0 and not shifted.*//********* DEST ***********/if(msg_type == _NORMAL){temp = strlen(dest);for(int j=0; j<temp; j++)send_char_NRZI(dest[j] << 1, HIGH);}else if(msg_type == _BEACON){temp = strlen(dest_beacon);for(int j=0; j<temp; j++)send_char_NRZI(dest_beacon[j] << 1, HIGH);}if(temp < 6){for(int j=0; j<(6 - temp); j++)send_char_NRZI(' ' << 1, HIGH);}send_char_NRZI('0' << 1, HIGH);/********* SOURCE *********/temp = strlen(mycall);for(int j=0; j<temp; j++)send_char_NRZI(mycall[j] << 1, HIGH);if(temp < 6){for(int j=0; j<(6 - temp); j++)send_char_NRZI(' ' << 1, HIGH);}send_char_NRZI((myssid + '0') << 1, HIGH);/********* DIGI ***********/temp = strlen(digi);for(int j=0; j<temp; j++)send_char_NRZI(digi[j] << 1, HIGH);if(temp < 6){for(int j=0; j<(6 - temp); j++)send_char_NRZI(' ' << 1, HIGH);}send_char_NRZI(((digissid + '0') << 1) + 1, HIGH);/***** CTRL FLD & PID *****/send_char_NRZI(_CTRL_ID, HIGH);send_char_NRZI(_PID, HIGH);
}void send_payload(char type)
{/** APRS AX.25 Payloads* * TYPE : POSITION* ........................................................* |DATA TYPE | LAT |SYMB. OVL.| LON |SYMB. TBL.|* --------------------------------------------------------* | 1 byte | 8 bytes | 1 byte | 9 bytes | 1 byte |* --------------------------------------------------------* * DATA TYPE : !* LAT : ddmm.ssN or ddmm.ssS* LON : dddmm.ssE or dddmm.ssW* * * TYPE : STATUS* ..................................* |DATA TYPE | STATUS TEXT |* ----------------------------------* | 1 byte | N bytes |* ----------------------------------* * DATA TYPE : >* STATUS TEXT: Free form text* * * TYPE : POSITION & STATUS* ..............................................................................* |DATA TYPE | LAT |SYMB. OVL.| LON |SYMB. TBL.| STATUS TEXT |* ------------------------------------------------------------------------------* | 1 byte | 8 bytes | 1 byte | 9 bytes | 1 byte | N bytes |* ------------------------------------------------------------------------------* * DATA TYPE : !* LAT : ddmm.ssN or ddmm.ssS* LON : dddmm.ssE or dddmm.ssW* STATUS TEXT: Free form text* * * All of the data are sent in the form of ASCII Text, not shifted.* */if(type == _FIXPOS){send_char_NRZI(_DT_POS, HIGH);send_string_len(lat, strlen(lat));send_char_NRZI(sym_ovl, HIGH);send_string_len(lon, strlen(lon));send_char_NRZI(sym_tab, HIGH);}else if(type == _STATUS){send_char_NRZI(_DT_STATUS, HIGH);send_string_len(mystatus, strlen(mystatus));}else if(type == _FIXPOS_STATUS){send_char_NRZI(_DT_POS, HIGH);send_string_len(lat, strlen(lat));send_char_NRZI(sym_ovl, HIGH);send_string_len(lon, strlen(lon));send_char_NRZI(sym_tab, HIGH);send_char_NRZI(' ', HIGH);send_string_len(mystatus, strlen(mystatus));}
}/** This function will send one byte input and convert it* into AFSK signal one bit at a time LSB first.* * The encode which used is NRZI (Non Return to Zero, Inverted)* bit 1 : transmitted as no change in tone* bit 0 : transmitted as change in tone*/
void send_char_NRZI(unsigned char in_byte, bool enBitStuff)
{bool bits;for(int i = 0; i < 8; i++){bits = in_byte & 0x01;calc_crc(bits);if(bits){set_nada(nada);bit_stuff++;if((enBitStuff) && (bit_stuff == 5)){nada ^= 1;set_nada(nada);bit_stuff = 0;}}else{nada ^= 1;set_nada(nada);bit_stuff = 0;}in_byte >>= 1;}
}void send_string_len(const char *in_string, int len)
{for(int j=0; j<len; j++)send_char_NRZI(in_string[j], HIGH);
}void send_flag(unsigned char flag_len)
{for(int j=0; j<flag_len; j++)send_char_NRZI(_FLAG, LOW);
}/** In this preliminary test, a packet is consists of FLAG(s) and PAYLOAD(s).* Standard APRS FLAG is 0x7e character sent over and over again as a packet* delimiter. In this example, 100 flags is used the preamble and 3 flags as* the postamble.*/
void send_packet(char packet_type, char dest_type)
{print_debug(packet_type, dest_type);digitalWrite(LED_BUILTIN, 1);digitalWrite(_PTT, LOW);/** AX25 FRAME* * ........................................................* | FLAG(s) | HEADER | PAYLOAD | FCS(CRC) | FLAG(s) |* --------------------------------------------------------* | N bytes | 22 bytes | N bytes | 2 bytes | N bytes |* --------------------------------------------------------* * FLAG(s) : 0x7e* HEADER : see header* PAYLOAD : 1 byte data type + N byte info* FCS : 2 bytes calculated from HEADER + PAYLOAD*/send_flag(100);crc = 0xffff;send_header(dest_type);send_payload(packet_type);send_crc();send_flag(3);digitalWrite(_PTT, HIGH);digitalWrite(LED_BUILTIN, 0);
}/** Function to randomized the value of a variable with defined low and hi limit value.* Used to create random AFSK pulse length.*/
void randomize(unsigned int &var, unsigned int low, unsigned int high)
{var = random(low, high);
}/** */
void set_io(void)
{pinMode(LED_BUILTIN, OUTPUT);pinMode(OUT_PIN, OUTPUT);pinMode(_PTT, OUTPUT);digitalWrite(_PTT, HIGH);Serial.begin(115200);
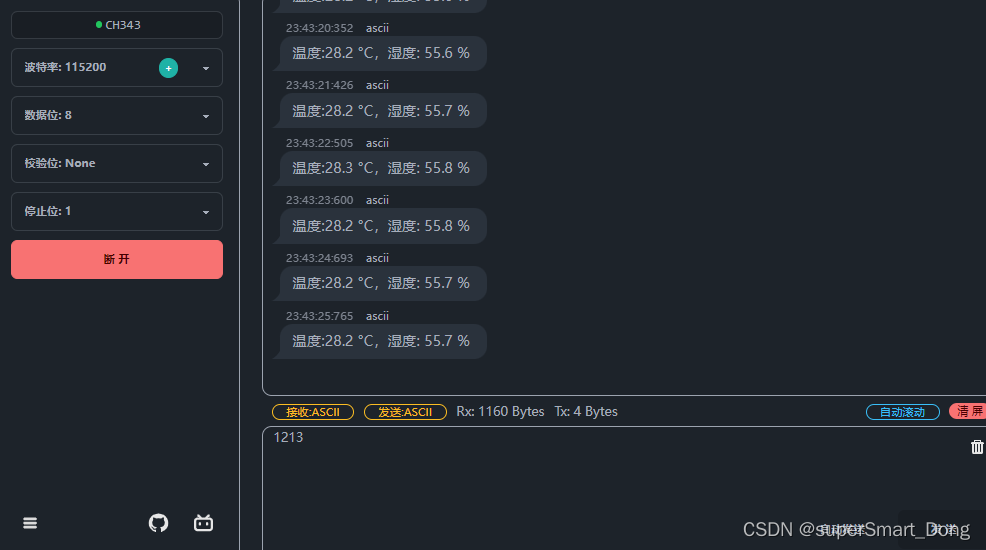
}void print_code_version(void)
{Serial.println(" ");Serial.print("Sketch: "); Serial.println(__FILE__);Serial.print("Uploaded: "); Serial.println(__DATE__);Serial.println(" ");Serial.println("Random String Pulsed AFSK Generator - Started \n");
}void print_debug(char type, char dest_type)
{/** PROTOCOL DEBUG.* * Will outputs the transmitted data to the serial monitor* in the form of TNC2 string format.* * MYCALL-N>APRS,DIGIn-N:<PAYLOAD STRING> <CR><LF>*//****** MYCALL ********/Serial.print(mycall);Serial.print('-');Serial.print(myssid, DEC);Serial.print('>');/******** DEST ********/if(dest_type == _NORMAL){Serial.print(dest);}else if(dest_type == _BEACON){Serial.print(dest_beacon);}Serial.print(',');/******** DIGI ********/Serial.print(digi);Serial.print('-');Serial.print(digissid, DEC);Serial.print(':');/******* PAYLOAD ******/if(type == _FIXPOS){Serial.print(_DT_POS);Serial.print(lat);Serial.print(sym_ovl);Serial.print(lon);Serial.print(sym_tab);}else if(type == _STATUS){Serial.print(_DT_STATUS);Serial.print(mystatus);}else if(type == _FIXPOS_STATUS){Serial.print(_DT_POS);Serial.print(lat);Serial.print(sym_ovl);Serial.print(lon);Serial.print(sym_tab);Serial.print(' ');Serial.print(mystatus);}Serial.println(' ');
}/** */
void setup()
{set_io();print_code_version();
}void loop()
{send_packet(random(1,4), random(1,3));delay(tx_delay);randomize(tx_delay, 10, 5000);randomize(str_len, 10, 420);
}
相关文章:
VX-3R APRS发射试验
VX-3R本身是不带APRS功能的,不过可能通过外加TNC实现APRS功能。 有大佬已经用Arduino实现了相应的发射功能: https://github.com/handiko/Arduino-APRS 我要做的,就是简单修改一下代码,做一个转接板。 YEASU官方没有给出VX-3R的音…...

JAVA毕业设计109—基于Java+Springboot+Vue的宿舍管理系统(源码+数据库)
基于JavaSpringbootVue的宿舍管理系统(源码数据库)109 一、系统介绍 本系统前后端分离 本系统分为学生、宿管、超级管理员三种角色 1、用户: 登录、我的宿舍、申请调宿、报修申请、水电费管理、卫生检查、个人信息修改。 2、宿管: 登录、用户管理…...

CMU/MIT/清华/Umass提出生成式机器人智能体RoboGen
文章目录 导读1. Introduction2. 论文地址3. 项目主页4. 开源地址5. RoboGen Pipeline6. Experimental Results作者介绍Reference 导读 CMU/MIT/清华/Umass提出的全球首个生成式机器人智能体RoboGen,可以无限生成数据,让机器人7*24小时永不停歇地训练。…...
STM32:AHT20温湿度传感器驱动程序开发
注:温湿度传感器AHT20数据手册.pdf http://www.aosong.com/userfiles/files/AHT20%E4%BA%A7%E5%93%81%E8%A7%84%E6%A0%BC%E4%B9%A6(%E4%B8%AD%E6%96%87%E7%89%88)%20B1.pdf 一、分析AHT数据手册文档 (1).准备工作 1.新建工程。配置UART2 2.配置I2C1为I2C标准模式&…...

【Linux】第七站:vim的使用以及配置
文章目录 一、vim1.vim的介绍2.vim基本使用3.vim的命令模式常用命令4.底行模式 二、vim的配置 一、vim 1.vim的介绍 vim编辑器,用来文本编写,可以写代码 它是一个多模式的编辑器 它有很多的模,不过我们暂时先只考虑这三种模式 命令模式插入模…...

汇编-算术运算符
下面给出了一些有效表达式和它们的值:...
线性代数 第六章 二次型
一、矩阵表示 称为二次型的秩。只含有变量的平方项,所有混合项系数全是零,称为标准形;平方项的系数为1、-1或0,称为规范形。 二次型的标准形不唯一,可以用不用的坐标变换化二次型为标准形;二次型的规范形唯…...
leetCode 213. 打家劫舍 II + 动态规划 + 从记忆化搜索到递推 + 空间优化
关于此题我的往期文章,动规五部曲详解篇: leetCode 213. 打家劫舍 II 动态规划 房间连成环怎么偷呢?_呵呵哒( ̄▽ ̄)"的博客-CSDN博客https://heheda.blog.csdn.net/article/details/133409962213. 打家劫舍 II - 力扣&#x…...
网络编程套接字(二)
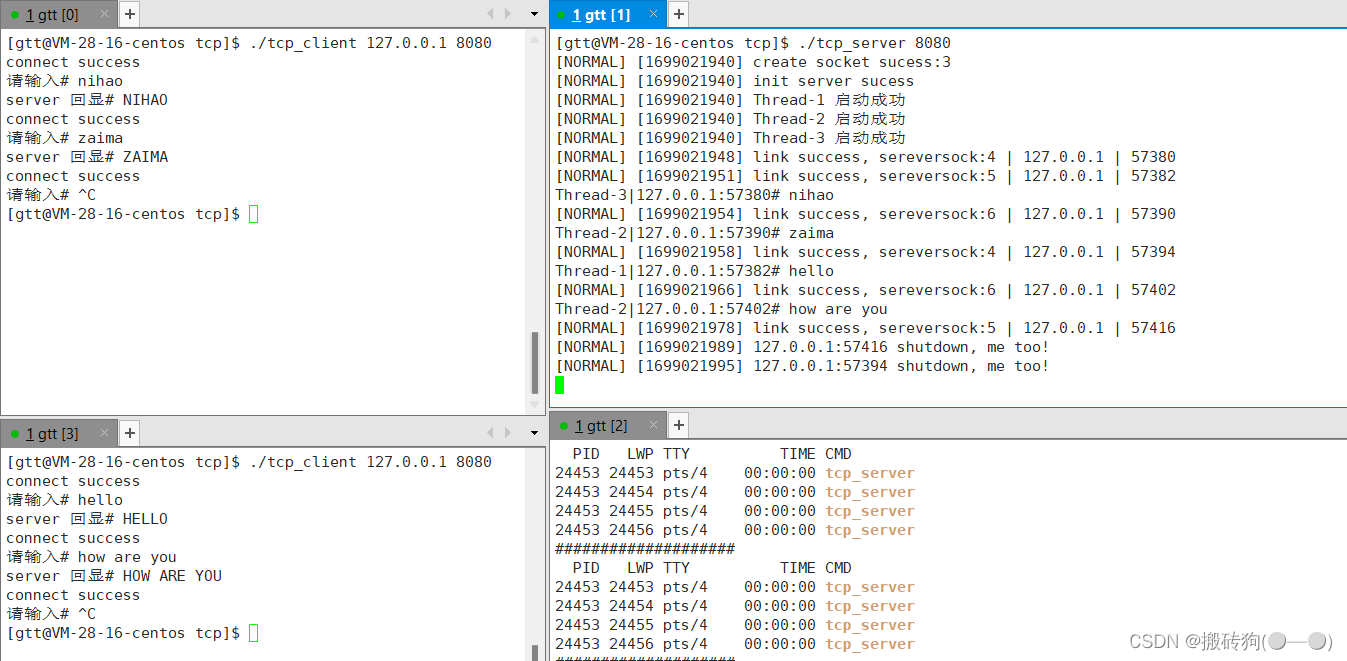
目录 简单的TCP网络程序服务端创建套接字服务端绑定服务端监听服务端获取连接服务端处理请求单执行流服务器的弊端 多进程版TCP网络程序捕捉SIGCHLD信号让孙子进程提供服务多线程版的TCP网络程序客户端创建套接字客户端链接服务器客户端发起请求 线程池版的TCP网络程序 简单的T…...
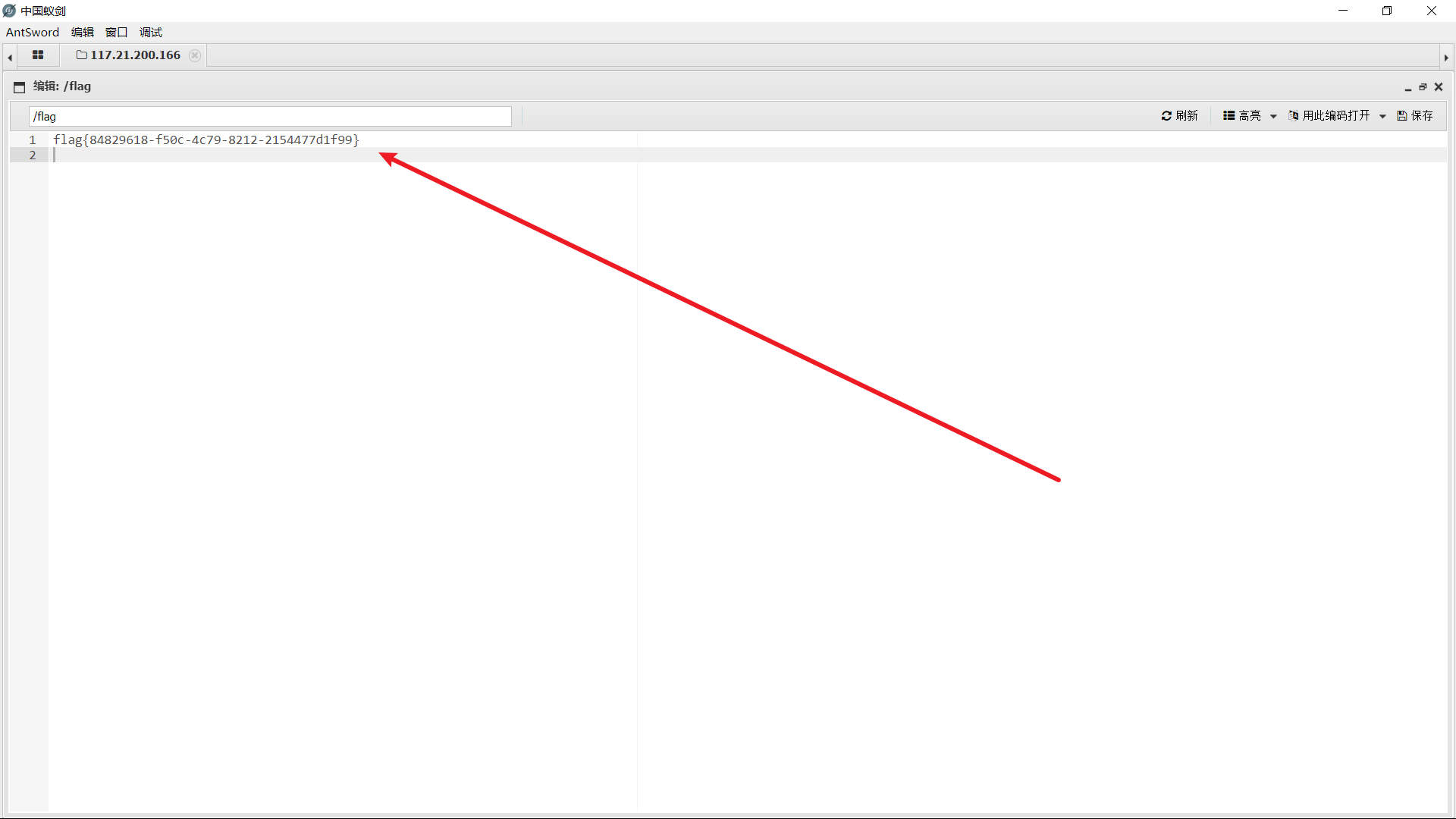
[极客大挑战 2019]Knife 1(两种解法)
题目环境: 这道题主要考察中国菜刀和中国蚁剑的使用方法 以及对PHP一句话木马的理解 咱们先了解一下PHP一句话木马,好吗? **eval($_POST["Syc"]);** **eval是PHP代码执行函数,**把字符串按照 PHP 代码来执行。 $_POST P…...
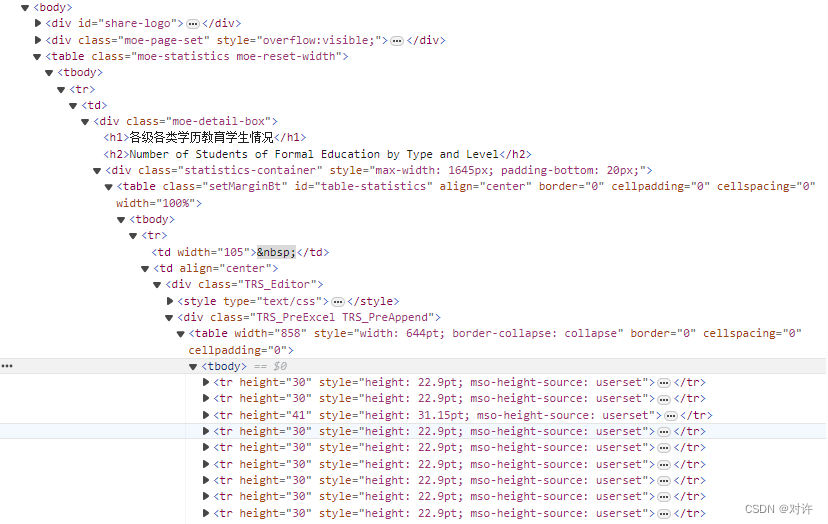
国家统计局教育部各级各类学历教育学生情况数据爬取
教育部数据爬取 1、数据来源2、爬取目标3、网页分析4、爬取与解析5、如何使用Excel打开CSV1、数据来源 国家统计局:http://www.stats.gov.cn/sj/ 教育部:http://www.moe.gov.cn/jyb_sjzl/ 数据来源:国家统计局教育部文献教育统计数据2021年全国基本情况(各级各类学历教育学…...

mysql、clickhouse时间日期加法
mysql 在’2023-10-27 23:59:59’上增加5秒: SELECT DATE_ADD(2023-10-27 23:59:59, INTERVAL 5 second);clickhouse SELECT date_add(SECOND, 3, toDate(2018-01-01 00:00:00));clickhouse时间按秒、分、时、日、月、年作差 按秒: SELECT dateDiff…...

21.合并两个有序链表
#include <iostream>struct ListNode {int val;ListNode* next;ListNode(int x) : val(x), next(nullptr) {} };class Solution { public:ListNode* mergeTwoLists(ListNode* l1, ListNode* l2) {ListNode dummy ListNode(-1); // 创建一个虚拟节点作为头节点ListNode* …...

thinkphp漏洞复现
thinkphp漏洞复现 ThinkPHP 2.x 任意代码执行漏洞Thinkphp5 5.0.22/5.1.29 远程代码执行ThinkPHP5 5.0.23 远程代码执行ThinkPHP5 SQL Injection Vulnerability && Sensitive Information Disclosure VulnerabilityThinkPHP Lang Local File Inclusion ThinkPHP 2.x 任…...
暴力递归转动态规划(十三)
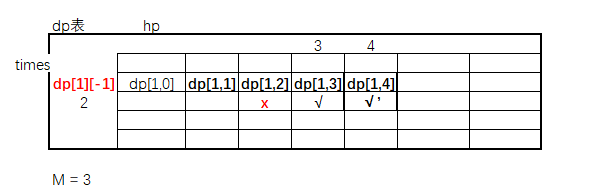
题目 给定3个参数,N,M,K 怪兽有N滴血,等着英雄来砍自己 英雄每一次打击,都会让怪兽流失[0~M]的血量 到底流失多少?每一次在[0~M]上等概率的获得一个值 求K次打击之后,英雄把怪兽砍死的概率。 暴…...
java EE 进阶
java EE 主要是学框架(框架的使用,框架的原理) 框架可以说是实现了部分功能的半成品,还没装修的毛坯房,然后我们再自己打造成自己喜欢的成品 这里学习四个框架 : Spring ,Spring Boot, Spring MVC, Mybatis JavaEE 一定要多练习,才能学好 Maven 目前我们主要用的两个功能: …...

记录paddlepaddle-gpu安装
背景 由于最近需要使用paddleocr,因此需要安装依赖paddlepaddle-gpu,不管怎么安装cuda11.6-11.8安装了一遍,都无法正常安装成功。如下所示: 环境:wsl2linux18.04 >>> import paddle >>> paddle.u…...
django如何连接sqlite数据库?
目录 一、SQLite数据库简介 二、Django连接SQLite数据库 1、配置数据库 2、创建数据库表 三、使用Django ORM操作SQLite数据库 1、定义模型 2、创建对象 3、查询对象 总结 本文将深入探讨如何在Django框架中连接和使用SQLite数据库。我们将介绍SQLite数据库的特点&…...
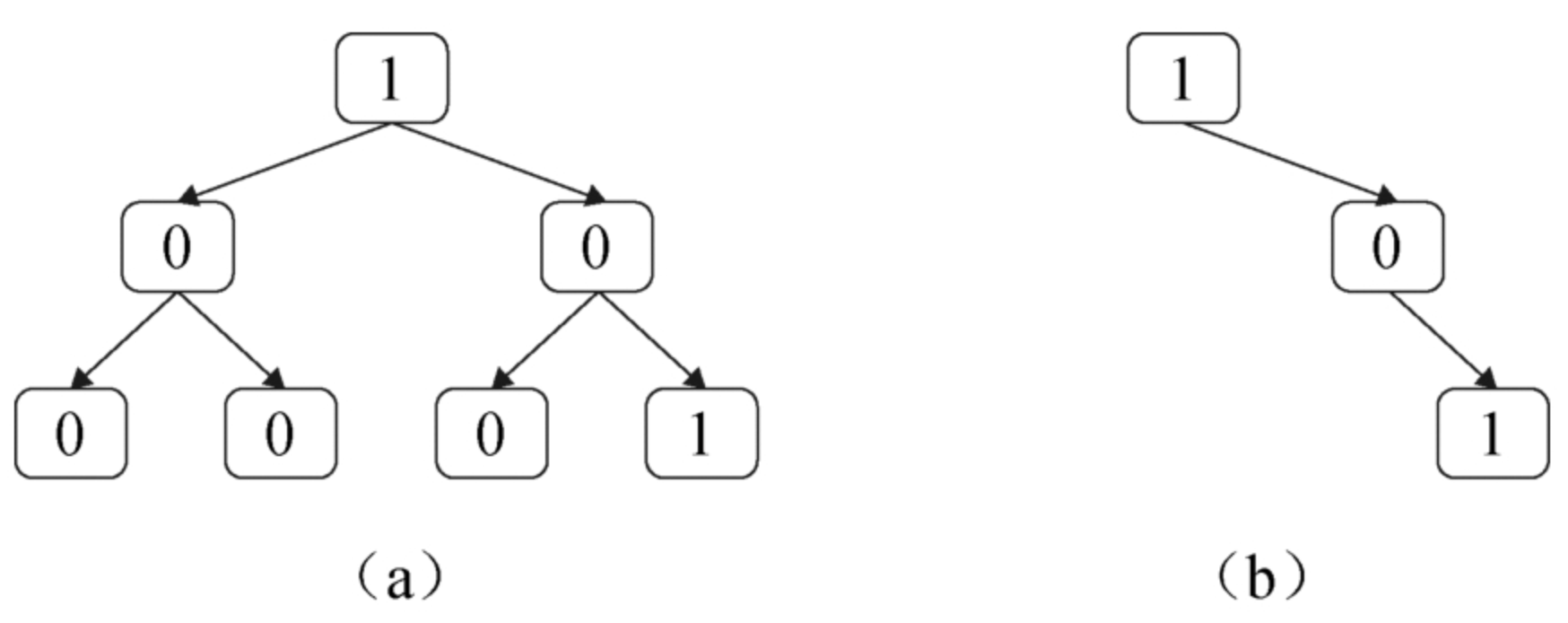
面试算法47:二叉树剪枝
题目 一棵二叉树的所有节点的值要么是0要么是1,请剪除该二叉树中所有节点的值全都是0的子树。例如,在剪除图8.2(a)中二叉树中所有节点值都为0的子树之后的结果如图8.2(b)所示。 分析 下面总结什么样的节…...
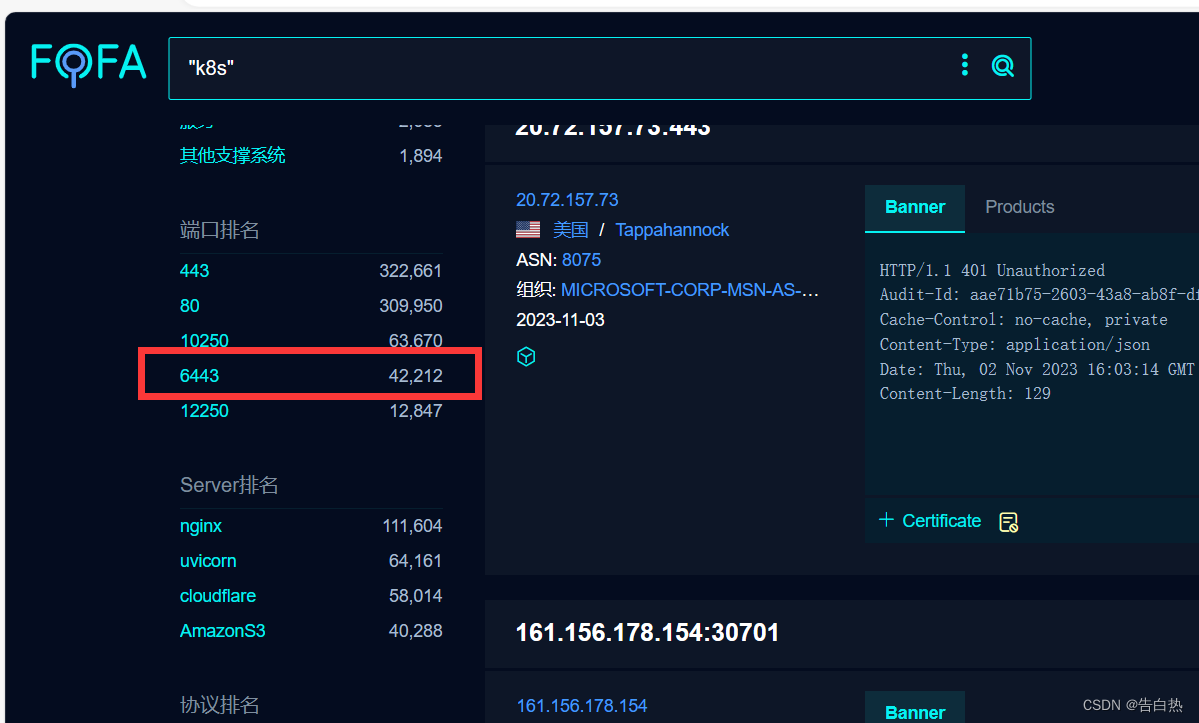
云安全-云原生k8s攻击点(8080,6443,10250未授权攻击点)
0x00 k8s简介 k8s(Kubernetes) 是容器管理平台,用来管理容器化的应用,提供快速的容器调度、弹性伸缩等诸多功能,可以理解为容器云,不涉及到业务层面的开发。只要你的应用可以实现容器化,就可以部…...

具身智能:软件测试从业者的新赛道
当软件测试的触角还在数字世界里深耕代码逻辑、验证功能完整性时,具身智能正以“AI实体”的姿态,打破虚拟与现实的边界,为测试行业开辟出一片全新的疆域。作为软件测试从业者,理解具身智能的技术内核、发展现状与未来趋势…...

家庭宽带上网背后的隐形功臣:一文拆解光猫/路由器里的NAT和DHCP是怎么协同工作的
家庭网络中的隐形守护者:NAT与DHCP如何编织你的数字生活 当你躺在沙发上用手机追剧时,是否想过为什么所有家庭设备都能和平共处在同一网络?192.168.1.x这串神秘数字背后,藏着两套精密的协议系统——它们像建筑物的水电管线般隐形却…...
:1次失败=2.3小时调试,我们帮你省下87%时间)
ElevenLabs芬兰语TTS部署踩坑实录(含CI/CD流水线集成模板):1次失败=2.3小时调试,我们帮你省下87%时间
更多请点击: https://kaifayun.com 第一章:ElevenLabs芬兰语TTS部署踩坑实录(含CI/CD流水线集成模板):1次失败2.3小时调试,我们帮你省下87%时间 核心痛点:芬兰语语音合成的隐性陷阱 ElevenLab…...

从‘六度空间’到HNSW:图解这个让推荐系统变快的底层算法
从“六度空间”到HNSW:让推荐系统快如闪电的底层逻辑 你是否想过,为什么社交平台上总能精准推荐你可能认识的人?电商网站能在毫秒间为你匹配心仪商品?这一切背后,都藏着一个将“六度分隔理论”数学化的算法——HNSW&am…...

“文章同步助手” Wechatsync 连接到WordPress独立站
“文章同步助手” Wechatsync 浏览器插件,可以将文章一键分发到包括WordPress在内的二十多个内容平台- 。这连接逻辑本质上都是调用WordPress的REST API来建立连接。 🔌 连接独立站 WordPress 的操作流程 要实现同步,你需要在浏览器插件中配置…...

Taotoken官方折扣活动如何切实降低模型调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken官方折扣活动如何切实降低模型调用成本 1. 成本感知:从按需付费到计划性支出 对于个人开发者或中小型团队而言…...

Diablo Edit2:5分钟掌握暗黑破坏神2终极角色编辑器
Diablo Edit2:5分钟掌握暗黑破坏神2终极角色编辑器 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 你是否厌倦了在暗黑破坏神2中反复刷装备的无尽循环?是否因为技能点分配失…...

初次使用Taotoken从注册到发出第一个API请求的全流程耗时记录
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初次使用Taotoken从注册到发出第一个API请求的全流程耗时记录 1. 流程概览与预期 对于初次接触大模型聚合平台的开发者而言&#…...
:当 Agent 拥有了物理世界的身体)
具身智能(Embodied AI):当 Agent 拥有了物理世界的身体
具身智能(Embodied AI):当Agent拥有了物理世界的身体,下一个十年的科技革命? 一、引言 (Introduction) 钩子 (The Hook) 你有没有过这样的幻想:下班回家推开门,AI机器人已经做好了你爱吃的糖醋排骨,把换下来的脏衣服扔进了洗衣机,甚至还帮你把刚到的快递拆好了?过去…...

从一颗2N5551看懂半导体散热:热阻Rja、Rjc到底怎么测?对我们选型有啥用?
从一颗2N5551看懂半导体散热:热阻Rja、Rjc到底怎么测?对我们选型有啥用? 拆开一颗塑料封装的2N5551三极管,你会看到指甲盖大小的黑色环氧树脂包裹着不到1平方毫米的硅晶片。这个微型结构在工作时产生的热量,可能让芯片…...