K7系列FPGA进行FLASH读写1——CCLK控制(STARTUPE2原语)
最近的工作涉及对 FPGA 进行远程更新,也就是通过远程通信接口将 .bin 文件送到 FPGA,然后写入 FLASH,这样当 FPGA 重新上电后就可以执行更新后的程序了。因此第一步工作就是进行 FLASH 的读写控制。
然而如果尝试配置 FLASH 管脚时,会发现 CCLK 管脚是不可配置的,这实际上是因为 CCLK_0 管脚在内部已经被占用,我们必须通过其他方式获取/设置它。笔者所用芯片为 K7 系列,根据 ug470 数据手册,我们可以使用 STARTUPE2 原语获取、设置该时钟,官方手册的介绍如下



原语调用格式如下
STARTUPE2 #(.PROG_USR ("FALSE"),.SIM_CCLK_FREQ (0.0)
)
STARTUPE2_inst(.CFGCLK (cfgclk),.CFGMCLK (cfgmclk),.EOS (eos),.PREQ (),.CLK (0),.GSR (0),.GTS (0),.KEYCLEARB (1),.PACK (1),.USRCCLKO (usrcclk),.USRCCLKTS (0),.USRDONEO (1),.USRDONETS (0)
);
-
CFGCLK,配置逻辑主时钟,仅在配置时有输出,在 master 模式下也一直存在(存疑;根据后面的测试,文档所说的 Persist Enabled 应当指的是 Master 模式下一直使能/连接,但除了配置的时候存在时钟,其他时候为无效的高电平;在配置了 USRCCLK 时,在 FPGA 配置结束后三个 clk 该时钟将切换到 USRCCLK)。Configuration mode 是根据 M[2:0] 管脚配置的,最常用的是 M[2:0]=001 对应的 Master SPI 配置模式,笔者开发板即本模式,Master 模式下 CCLK 由 FPGA 输出给 FLASH 的 SCK;
-
EOS,End Of Start,指示 FPGA 配置的结束;
-
CFGMCLK,配置内部振荡器时钟,是从内部的一个锁相环输出的 65MHz 时钟(不是很准,笔者输出到 GPIO 用示波器看过,那块板子的 ~68MHz);
-
USRDONEO,输出到FPGA 的 DONE_0 管脚。一般而言,在硬件设计中会在这个管脚挂一个 LED 灯,以指示 FPGA 完成配置开始运行;
-
USRDONETS,控制 DONE 管脚的三态门,1 将设置为高阻,0 将会把用户给入的 USRDONEO 输出到 DONE_0 管脚;
-
USRCCLKO,在配置完成后,驱动 CCLK_0 管脚的用户自定义时钟。在配置完成后,前三个时钟周期用于切换时钟源,且不会被输出,但如果使用了 EMCCLK 管脚,则 EMCCLK 信号会出现在 CCLK 管脚上,直到过渡到用户自定义时钟;
-
USRCCLKTS,控制 USRCCLKO 的三态门;
-
GTS,全局三态门使能,要用户自定义 CCLK/DONE 等,此管脚必须置低。
其他信号详见官方手册说明,默认启动设置下,配置期间的时序图如下

测试
不配置 USRCCLKO
STARTUPE2 STARTUPE2_inst (.CFGCLK (cfgclk),.CFGMCLK (cfgmclk),.EOS (eos)
);
做如上配置,将上述三信号输出到 GPIO 以及 ILA。测试发现 cfgclk 仅在上电一瞬有输出,之后为常高(Master SPI 模式);CFGMCLK 为 ~65MHz 时钟,输出到 GPIO 的信号极其微弱,但 ILA 可以正常捕获,因此此时钟可用于 FPGA 内部逻辑,但不可直接输出(其驱动 I/O 的能力太弱了);EOS 信号上电后一瞬即由低变高,指示配置完成,因此可用作 FPGA 启动的判断依据。
由于没有配置 USRCCLK,CCLK 仅在初始配置有信号。上述写法仅为获取 FPGA 内部时钟,以及判断 FPGA 是否配置完成,不涉及对 FLASH 的控制。
配置 USRCCLKO
要进行 FLASH 的读写,就要对 CCLK 进行配置,如下
STARTUPE2 #(.PROG_USR ("FALSE"),.SIM_CCLK_FREQ (0.0)
)
STARTUPE2_inst(.CFGCLK (cfgclk),.CFGMCLK (cfgmclk), //~65MHz,可用于 FPGA 内部逻辑,驱动 IO 的能力太弱了.EOS (eos), //指示 FPGA 配置完成.PREQ (),.CLK (0),.GSR (0),.GTS (0),.KEYCLEARB (1),.PACK (1),.USRCCLKO (usrcclk), //FLASH SCK.USRCCLKTS (0), //设为0以启用USRCCLK.USRDONEO (usrdone), //控制DONE_0管脚.USRDONETS (0) //设为0以启用usrdone,不想用就设为1
);
在该配置下,测试发现,cfgclk 将被配置为 usrcclk,这个也就是输出到 CCLK_0 的信号,ILA 捕获、GPIO 输出均正常;cfgmclk 仍为 ~65MHz 时钟,GPIO 输出极弱。
如果只是要控制 CCLK_0,可以只配置如下
STARTUPE2 STARTUPE2_inst(.GTS (0),.USRCCLKO (usrcclk),.USRCCLKTS (0)
);
通过控制 usrcclk 即可控制 CCLK_0 管脚了,从而获得对 FLASH 的控制权。
关于如何对 FLASH 芯片进行读写控制,将持续更新…
相关文章:
K7系列FPGA进行FLASH读写1——CCLK控制(STARTUPE2原语)
最近的工作涉及对 FPGA 进行远程更新,也就是通过远程通信接口将 .bin 文件送到 FPGA,然后写入 FLASH,这样当 FPGA 重新上电后就可以执行更新后的程序了。因此第一步工作就是进行 FLASH 的读写控制。 然而如果尝试配置 FLASH 管脚时࿰…...
【Kafka】基本概念
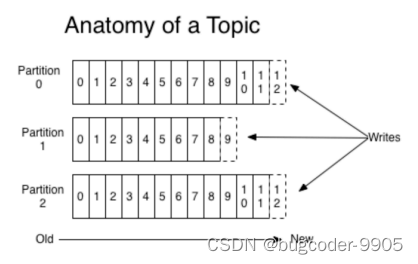
文章目录 一、消息队列的流派1.1 有Broker1.1.1 重topic1.1.2 轻topic 1.2 无Broker 二、kafka安装三、kafka基本术语四、发送消息五、消费消息六、单播消息七、多播消息八、查看消费组的详细信息九、主题topic十、分区十一、kafka中消息⽇志⽂件中保存的内容 一、消息队列的流…...

如何在Vue3项目中使用防抖节流技巧
前言 防抖节流是可以说是一种优化组件性能的技巧,可以有效减少组件中的渲染次数和计算量,从而提高组件的响应速度和用户体验。在Vue3中可以使用lodash库中的debounce和throttle函数来分别实现防抖和节流。当然也可以自行设计实现防抖节流函数࿰…...
快速排序(Java)
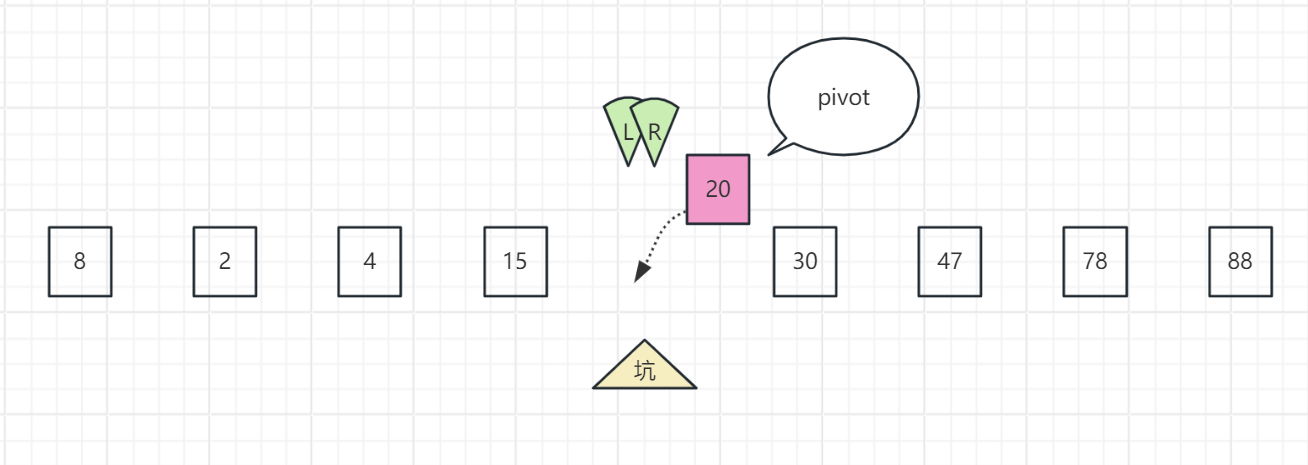
基本思想 快速排序Quicksort)是对冒泡排序的一种改进。 基本思想是分治的思想:通过一趟排序将要排序的数据分割成独立的两部分,其中一部分的所有数据都比另外一部分的所有数据都要小,然后再按此方法对这两部分数据分别进行快速排…...

在ffmpeg中,如何把h264转换为rgb格式
在ffmpeg中,网络视频流h264为什么默认的转为YUV而不是其他格式 文章中介绍了,h264解码的时候是直接解码为yuv的,如果在使用的过程中 需要用到rgb的格式,我们该如何来转换这种格式呢? 在上面的文章中,我们已…...

【重磅】Cookies、headers、Session规律总结,搞定卡点
【重磅】Cookies规律总结,搞定卡点 登录后开始正式获取数据阶段: 不使用session: 放在请求头headers中 当如是:headers = {“user-agent”: “Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/104.0.0.0 Safari/537.36”,“Coo…...
【雷达原理】雷达杂波抑制方法
目录 一、杂波及其特点 1.1 什么是杂波? 1.2 杂波的频谱特性 二、动目标显示(MTI)技术 2.1 对消原理 2.2 数字对消器设计 三、MATLAB仿真 3.1 对消效果验证 3.2 代码 一、杂波及其特点 1.1 什么是杂波? 杂波是相对目标回波而言的,…...
Python-敲木鱼升级版(真手动版敲木鱼)
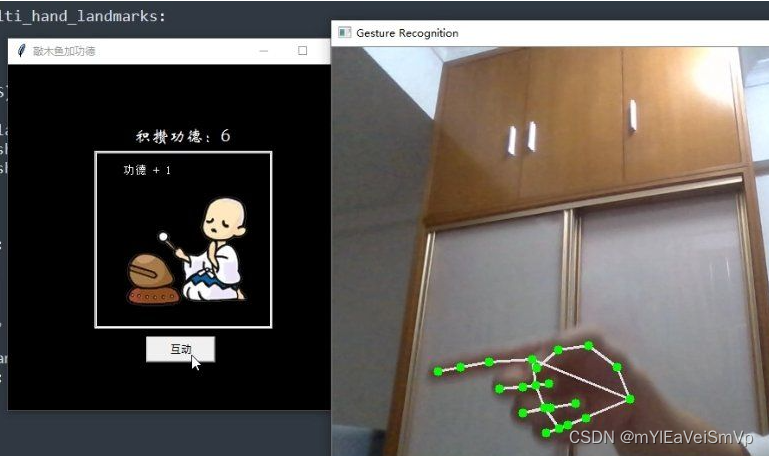
演示效果 需要安装的第三方库: pip install pygame # 加载音乐 pip install pillow # 加载图片 pip install mediapipe # 判断手势的模型 pip install opencv # 模型要用来处理图形 建议有独显和摄像头的可以尝试! 想着升级一下玩法,只有真敲…...
Websocket @ServerEndpoint不能注入@Autowired
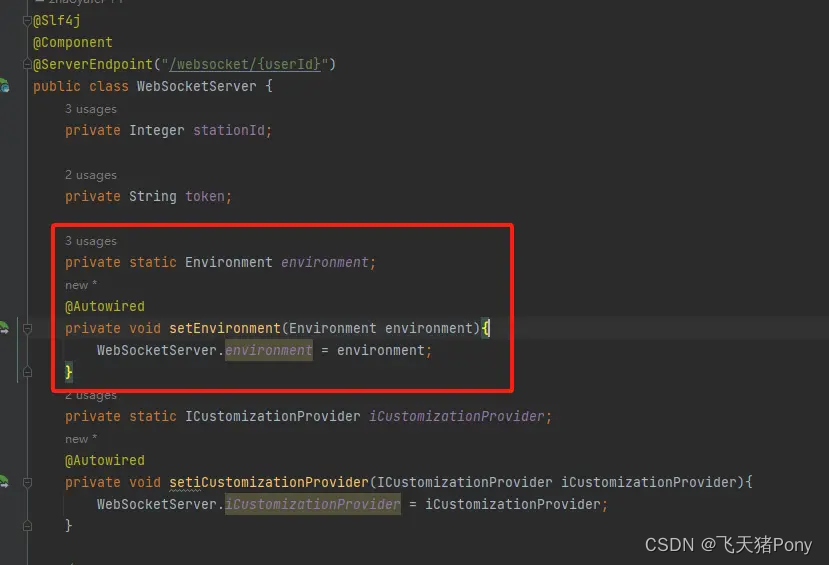
在websocket中使用ServerEndpoint无法注入Autowired、Value 问题分析 Spring管理采用单例模式(singleton),而 WebSocket 是多对象的,即每个客户端对应后台的一个 WebSocket 对象,也可以理解成 new 了一个 WebSocket&…...

Unity热更新
1,热更新的概念与作用 app更新通常分为两类,一种是整包更新(换包),一种是热更新(不换包,通过网络下载,动态更新资源等)。 整包更新,是指在需要更新时&#x…...
如何用维格云搭建和一键训练你的钧瓷AI机器人?
大禹智库 第69期(总第400期) 2023年11月4日 如何用维格云搭建和一键训练你的钧瓷AI机器人? 钧瓷私有数据聊天机器人是一种能够根据预设的数据集进行智能对话的机器人。通过维格云,我们可以轻松地搭建自己的钧瓷私有数据聊天机器人。本文将以钧道机器人为例,详细介绍如何…...

整理的一些Java细节问题
1. 为什么要有无参构造? 在 Java 中,如果一个类没有显式定义构造方法,编译器会自动生成一个默认的无参构造方法(也称为默认构造方法)。无参构造方法是一个没有任何参数的构造方法。 无参构造方法的存在有几个重要原因…...

初识AUTOSAR网络管理
文章目录 目的模式时间参数T_REPEAT_MESSAGET_NM_TIMEOUTT_WAIT_BUS_SLEEPT_START_Tx_AppFrameT_NM_ImmediateCycleTimeT_NM_MessageCycleN_ImmediateNM_TIMEST_START_NM_TXT_WakeUp跳转状态NM_1NM_2NM_3NM_4NM_5NM_6NM_7...

Flink SQL Hive Connector使用场景
目录 1.介绍 2.使用 2.1注册HiveCatalog 2.2Hive Read 2.2.1流读关键配置 2.2.2示例...
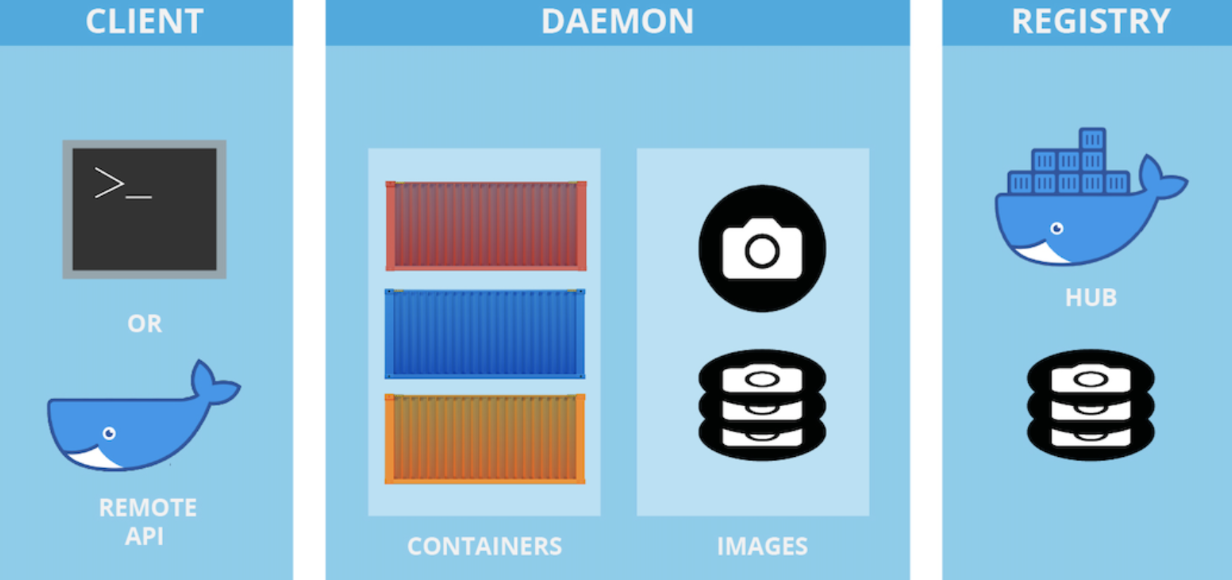
【Docker】联合探讨Docker:容器化技术的革命性应用
前言 Docker 是一个开源的应用容器引擎,让开发者可以打包他们的应用以及依赖包到一个可移植的容器中,然后发布到任何流行的Linux或Windows操作系统的机器上,也可以实现虚拟化,容器是完全使用沙箱机制,相互之间不会有任何接口。 📕作者简介:热…...

dirhunt使用手册,中文版
“dirhunt” 的命令行工具的帮助信息,用于目录扫描和网站内容分析。以下是这个命令的使用方法和示例: 命令格式: dirhunt [OPTIONS] [URLS]… [URLS]…:一个或多个域名或 URL,可以加载来自文件的 URL,使用…...

【从0到1设计一个网关】如何设计一个稳定的网关?
文章目录 高可用分析软件架构心跳检测自动恢复熔断降级接口重试隔离压测和预案多机房灾备以及双活数据中心异常处理机制重试主备服务自动切换动态剔除或恢复异常机器超时时间的考虑服务设计这篇文章并没有具体的业务实现,而只是对于如何设计一个高可用,稳定的网关列举出了一些…...

chromedp库编写程序
步骤1:首先,我们需要导入chromedp库,以便使用它来下载网页内容。 import chromedp 步骤2:然后,我们需要创建一个函数,该函数接受一个URL作为参数,并使用chromedp库下载该URL的内容。 func do…...

pngquant failed to build, make sure that libpng-dev is installed 问题
第一个参考方案失败 :npm install -g windows-build-tools4.0.0 安装失败,提示 依赖不在支持 第二个方案,降低node 版本 失败 第三种方案,成功 先执行,下面两行代码,再按照依赖 npm install imagemin-pn…...
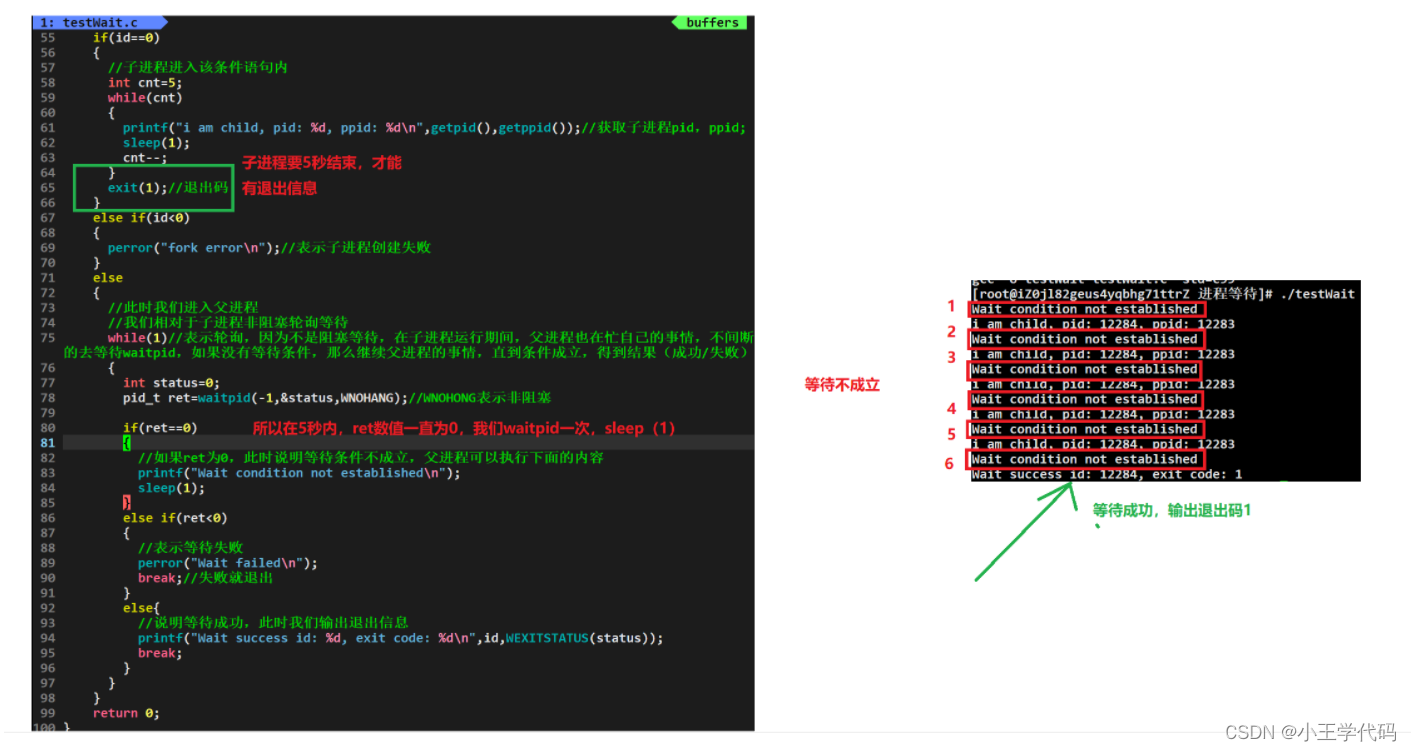
进程控制(二):进程等待
文章目录 进程控制(二)进程等待wait函数waitpid函数wait/waitpid获取子进程状态码的过程进程等待相关的宏 总结 进程控制(二) 延续对于上文进程结束,我们继续对于进程控制进行学习,本文我们主要是对于进程…...

宇视云团队模式访客预约操作流程
宇视云团队模式访客预约操作流程 本文将从创建访客邀请、来访信息登记、线上审批操作到最终多种方式通行,为您提供一步步的详细图文说明,引导企业内部员工和外部来访人员轻松上手,让访客接待更高效、更安全。 第一步:受访者创建“…...

宇视出入口相机抓拍调试速成方法
宇视出入口相机抓拍调试速成方法一、背景概述智慧园区、停车场等场景已普及宇视出入口抓拍相机,用于车辆出入管控与车牌识别。现场易受光照、车速、车道环境等影响,常出现漏抓、识别率低、画面模糊等问题。传统调试无标准、耗时长、上手门槛高࿰…...

告别Python依赖:用Libtorch C++ API将PyTorch模型封装成独立DLL/动态库
工业级AI集成:用Libtorch C构建高可用模型动态库 当AI模型需要从实验环境走向生产系统时,Python的依赖地狱和性能瓶颈往往成为绊脚石。本文将手把手带您实现从PyTorch模型到标准化C动态库的完整蜕变,打造一个既保持Python开发效率,…...

格式规范否?8款AI论文网站排名,毕业答辩稳了!
论文选题总在反复纠结,文献检索耗时又费力?写作过程中思路混乱,逻辑难以梳理?查重修改一遍又一遍,时间精力都被消耗殆尽? 别担心!AI论文工具正在成为高校学子的得力助手。本文将基于内容生成质量…...
)
告别低速串口:用STM32的FSMC总线驱动FPGA,实现高速数据交换的完整流程(基于STM32F407)
STM32与FPGA的高速数据通道:基于FSMC总线的实战设计指南 在嵌入式系统开发中,数据吞吐量常常成为制约系统性能的关键瓶颈。当STM32微控制器需要与FPGA进行大数据量交互时——无论是实时图像处理、高速数据采集还是复杂算法加速——传统的串行通信接口如…...

SSHFS-Win完整指南:如何在Windows上安全访问远程文件系统
SSHFS-Win完整指南:如何在Windows上安全访问远程文件系统 【免费下载链接】sshfs-win SSHFS For Windows 项目地址: https://gitcode.com/gh_mirrors/ss/sshfs-win 如果你需要在Windows系统中安全地访问远程Linux服务器的文件,SSHFS-Win正是你需要…...

Apache APISIX Dashboard:现代化API网关管理的架构演进与实践方案
Apache APISIX Dashboard:现代化API网关管理的架构演进与实践方案 【免费下载链接】apisix-dashboard Dashboard for Apache APISIX 项目地址: https://gitcode.com/gh_mirrors/ap/apisix-dashboard 在微服务架构日益普及的今天,API网关已成为连接…...

5分钟快速搭建Windows RTMP流媒体服务器:新手完整指南
5分钟快速搭建Windows RTMP流媒体服务器:新手完整指南 【免费下载链接】nginx-rtmp-win32 Nginx-rtmp-module Windows builds. 项目地址: https://gitcode.com/gh_mirrors/ng/nginx-rtmp-win32 想要在Windows系统上搭建自己的直播服务器吗?nginx…...

BilibiliDown终极指南:5分钟掌握B站视频下载与音频提取
BilibiliDown终极指南:5分钟掌握B站视频下载与音频提取 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/…...

3分钟掌握Godot游戏资源解包:免费开源工具快速提取PCK文件
3分钟掌握Godot游戏资源解包:免费开源工具快速提取PCK文件 【免费下载链接】godot-unpacker godot .pck unpacker 项目地址: https://gitcode.com/gh_mirrors/go/godot-unpacker 还在为Godot游戏中的资源文件无法访问而烦恼吗?想要学习优秀游戏的…...