机器人物理交互场景及应用的实际意义
机器人物理交互场景是指机器人与物理世界或人类进行实际的物理互动和交互的情境。这些场景涉及机器人在不同环境和应用中使用其物理能力,以执行任务、提供服务或与人类互动。
-
医疗协助:
- 外科手术助手:机器人可以用于外科手术,提供高精度的操作,减小手术风险和加速康复。
- 康复辅助:机器人可以协助康复训练,帮助康复患者进行运动和步态训练,以促进康复进程。
-
医疗服务:
- 护理机器人:机器人可以提供患者护理,包括监测、药物分发和基本的护理任务,以减轻医护人员的工作压力。
- 远程医疗:机器人可以在医生和患者之间建立远程医疗联系,进行诊断和治疗,特别是在偏远地区或紧急情况下。
-
教育和培训:
- 教育机器人:机器人可以用于教育和培训,教授编程、科学、数学和其他学科,增强学生的学习兴趣。
- 技能培训:机器人可以模拟实际场景,用于培训工人、驾驶员、飞行员等,提高技能水平。
-
家庭和日常生活:
- 家务机器人:机器人可以扫地、擦窗、烹饪、提供老年人和残障人士的照顾,改善家庭生活质量。
- 娱乐和陪伴:机器人可以提供娱乐、游戏和陪伴,与家庭成员互动,减轻孤独感。
-
搜索和救援:
- 灾难救援机器人:机器人可以用于搜寻受灾地区的幸存者,提供紧急救援服务,减少人员风险。
- 探险和勘探:机器人可以用于探索危险或难以到达的地方,如海底、太空或毒气泄漏地点,以收集信息或执行任务。
物理人机交互控制方法是一种允许人与机器人在物理空间中互相作用和协作的控制策略。这些方法允许机器人与人类用户或其他物体进行实时物理交互,以执行任务、提供服务或改进工作流程。以下是一些物理人机交互控制方法的示例:
-
力控制:力控制是一种控制方法,其中机器人的运动受到外部施加的力或扭矩的影响。力控制允许机器人感知和适应外部力的变化,从而与人类用户或其他物体进行物理互动。这种方法广泛应用于协作机器人、外科手术机器人和其他需要精确控制力的应用中。
-
力/力矩传感器:力/力矩传感器安装在机器人的末端工具或关节上,用于实时测量外部力和扭矩。这些传感器提供了关于物体的力学性质的重要信息,使机器人能够实现精确的力控制、碰撞检测和力反馈。
-
视觉反馈:视觉传感器,如摄像头或深度相机,可用于捕捉和分析环境中的视觉信息。视觉反馈可以用于机器人的自主导航、物体检测和跟踪、姿态估计以及与人类用户的互动。
-
姿态控制:姿态控制涉及机器人的末端工具或身体部分的定位和方向控制。机器人可以使用姿态传感器来监测其姿态,并根据预定的目标来调整其位置和方向。
-
力矩控制:力矩控制是一种控制方法,用于控制机器人的关节力矩或扭矩。这种控制方法在需要高度精确性和力矩控制的应用中特别有用,如外科手术机器人和装配应用。
-
协作控制:协作控制方法允许机器人与人类用户或其他机器人协同工作。这包括共享控制,其中人和机器人共同执行任务,以及协作控制,其中机器人根据人的动作和意图进行调整和协作。
-
紧急停止和安全控制:机器人通常具有紧急停止按钮和碰撞检测传感器,以便在出现意外情况时立即停止运动,以确保安全。
物理人机交互控制方法在文献中有多种研究方向和方法,每种方法都有其优点和缺点。以下是一些常见的物理人机交互控制方法以及它们的优缺点:
-
力控制:
- 优点:
- 具有高度精确的力控制能力,使机器人可以适应外部力的变化。
- 适用于需要与人合作或与不规则形状物体互动的任务。
- 缺点:
- 复杂性较高,需要精密的硬件和传感器。
- 对控制算法的要求高,需要高性能计算能力。
- 优点:
-
视觉反馈:
- 优点:
- 能够实现自主导航、物体检测和跟踪等任务。
- 具有广泛的应用领域,如机器视觉和虚拟现实。
- 缺点:
- 受到光照和环境条件的影响。
- 需要高度复杂的图像处理和计算机视觉算法。
- 优点:
-
姿态控制:
- 优点:
- 适用于需要定位和方向控制的任务,如物体抓取和装配。
- 可以通过惯性测量单元(IMU)等传感器实现。
- 缺点:
- 对初始校准和传感器噪声敏感。
- 通常需要较复杂的控制算法。
- 优点:
-
协作控制:
- 优点:
- 允许机器人与人类用户或其他机器人共同工作。
- 增强了机器人的适应性和协同能力。
- 缺点:
- 需要复杂的通信和协作算法。
- 对用户与机器人之间的协同理解和信任有挑战。
- 优点:
-
力矩控制:
- 优点:
- 提供高度精确的力矩控制,适用于需要高度精确性和力控制的应用,如外科手术。
- 具有力矩反馈,可以用于力控制和碰撞检测。
- 缺点:
- 需要复杂的控制算法和高性能计算能力。
- 需要高成本的硬件,如高精度传感器。
- 优点:
存在的科学问题和关键技术包括:
-
感知和感知融合:如何更好地利用多种传感器(力传感器、视觉传感器、姿态传感器等)的数据来实现高效的物理人机交互。
-
实时控制算法:如何开发更快速、更稳定的实时控制算法,以适应快速变化的外部力和环境。
-
机器学习和自适应控制:如何使用机器学习方法来改进机器人的物理交互能力,以适应不同任务和工作环境。
-
安全性和人机协同:如何确保物理人机交互的安全性,以减少事故风险,同时提高机器人与人类用户的协同性。
-
低成本硬件和传感器:如何降低物理人机交互控制系统的成本,使其更容易广泛应用。
-
标准化和通信协议:如何开发通用的标准和通信协议,以促进不同厂家和设备之间的互操作性。
相关文章:

机器人物理交互场景及应用的实际意义
机器人物理交互场景是指机器人与物理世界或人类进行实际的物理互动和交互的情境。这些场景涉及机器人在不同环境和应用中使用其物理能力,以执行任务、提供服务或与人类互动。 医疗协助: 外科手术助手:机器人可以用于外科手术,提供…...
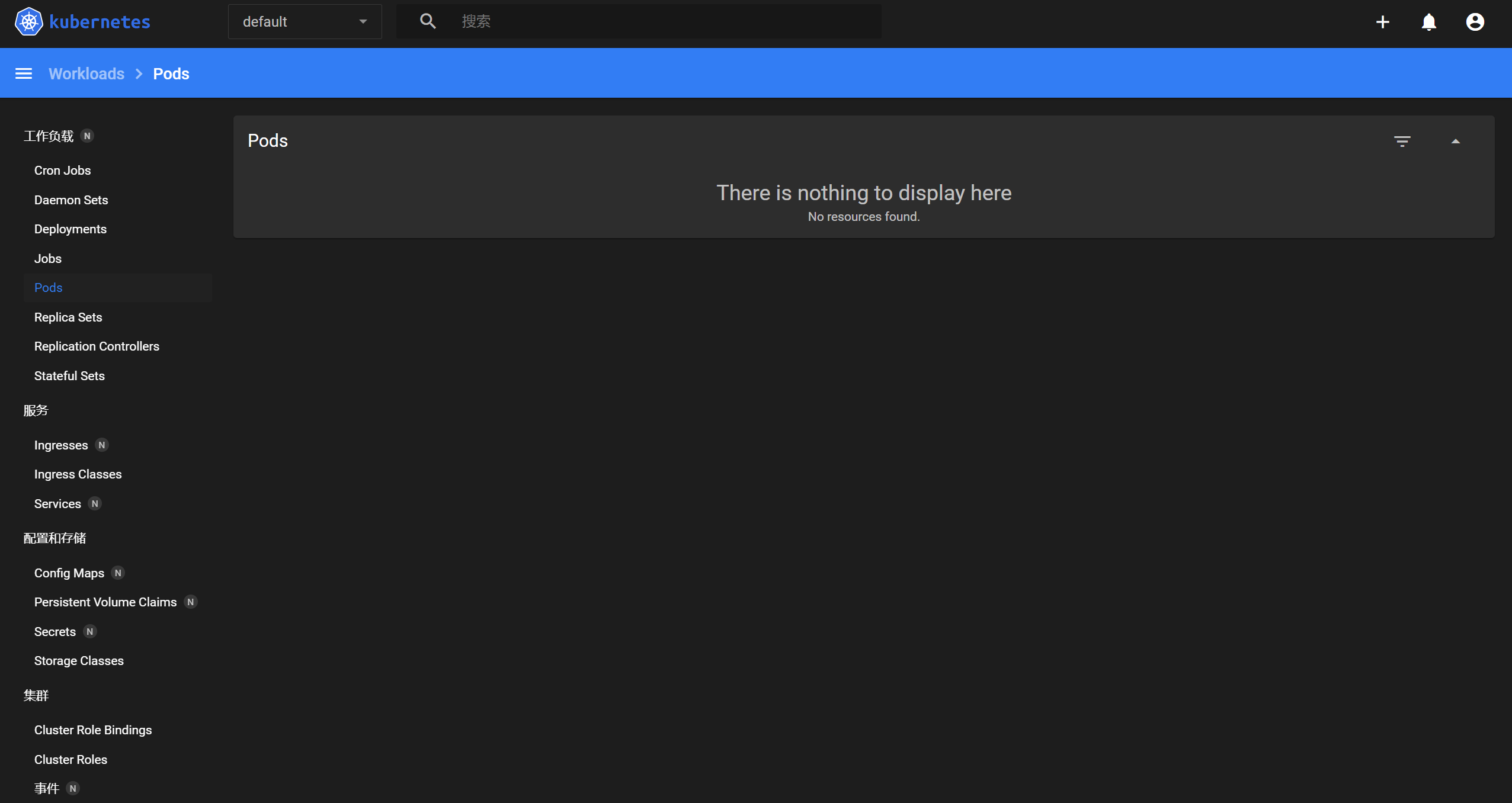
Kubernetes Dashboard 用户名密码方式登录
Author:rab 前言 为了 K8s 集群安全,默认情况下 Dashboard 以 Token 的形式登录的,那如果我们想以用户名/密码的方式登录该怎么操作呢?其实只需要我们创建用户并进行 ClusterRoleBinding 绑定即可,接下来是具体的操作…...

Redisson中的对象
Redisson - 是一个高级的分布式协调Redis客服端,能帮助用户在分布式环境中轻松实现一些Java的对象 (Bloom filter, BitSet, Set, SetMultimap, ScoredSortedSet, SortedSet, Map, ConcurrentMap, List, ListMultimap, Queue, BlockingQueue, Deque, BlockingDeque, …...
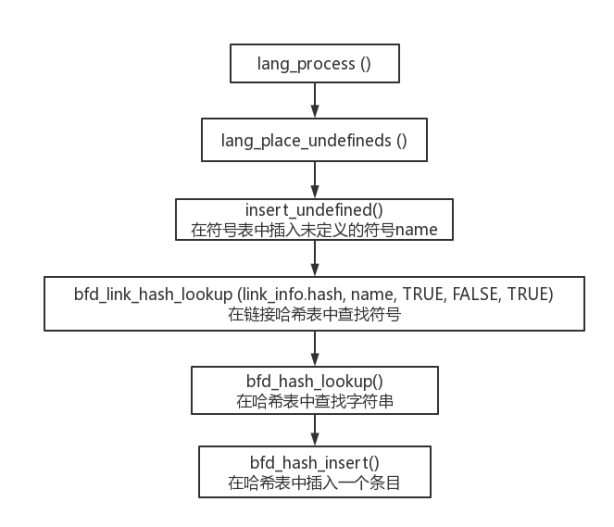
GNU ld链接器 lang_process()(二)
一、ldemul_create_output_section_statements() 位于lang_process()中11行 。 该函数用于创建与目标有关的输出段的语句。这些语句将用于描述输出段的属性和分配。 void ldemul_create_output_section_statements (void) {if (ld_emulation->create_output_section_sta…...
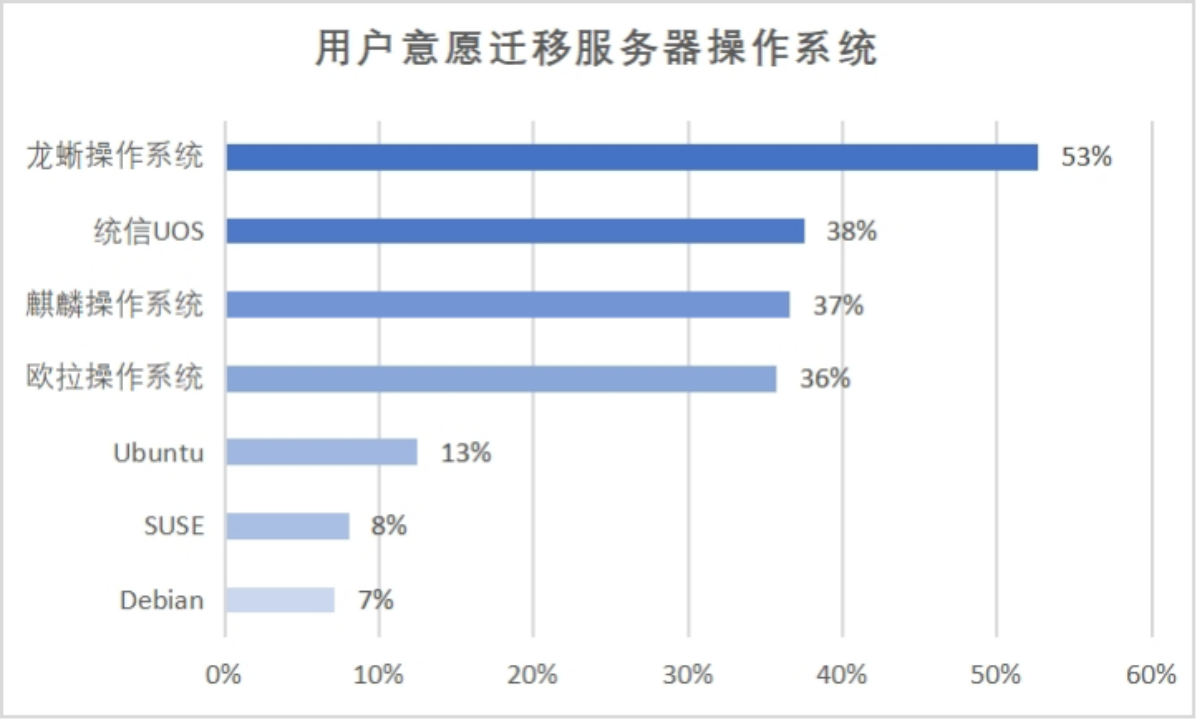
《国产服务器操作系统发展报告(2023)》重磅发布
11月1日,《国产服务器操作系统发展报告(2023)》(以下简称“报告”)在 2023 云栖大会上正式发布,开放原子开源基金会理事长孙文龙、中国信息通信研究院副总工程师石友康、阿里云基础软件部副总裁马涛、浪潮信…...
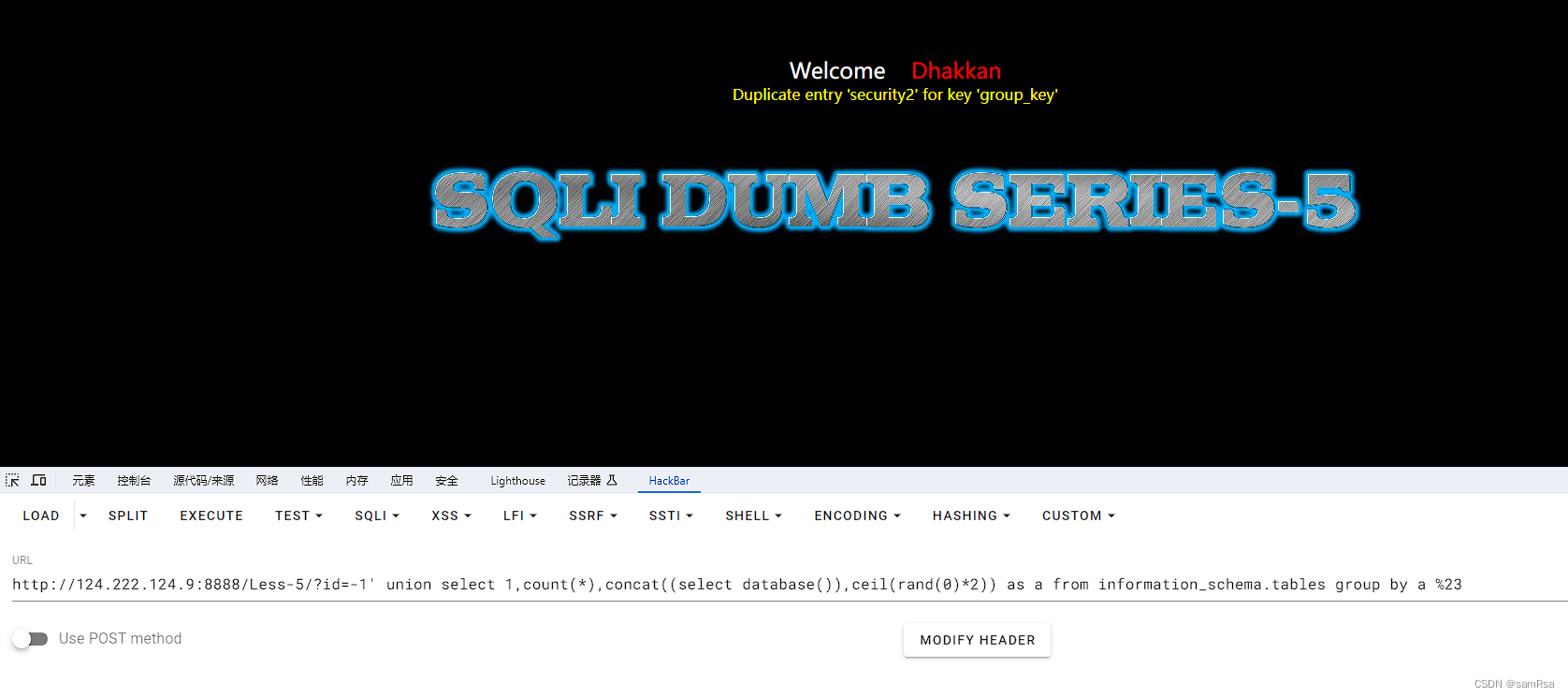
【PTE-day03 报错注入】
报错注入 1、报错注入 group by count2、报错注入 extractvalue3、报错注入updatexml1、报错注入 group by count http://124.222.124.9:8888/Less-5/?id=-1 union select 1,count(*),concat((select database()),ceil(rand(0)*2)) as a from information_schema.tables grou…...
jenkins gitlab CI/CD
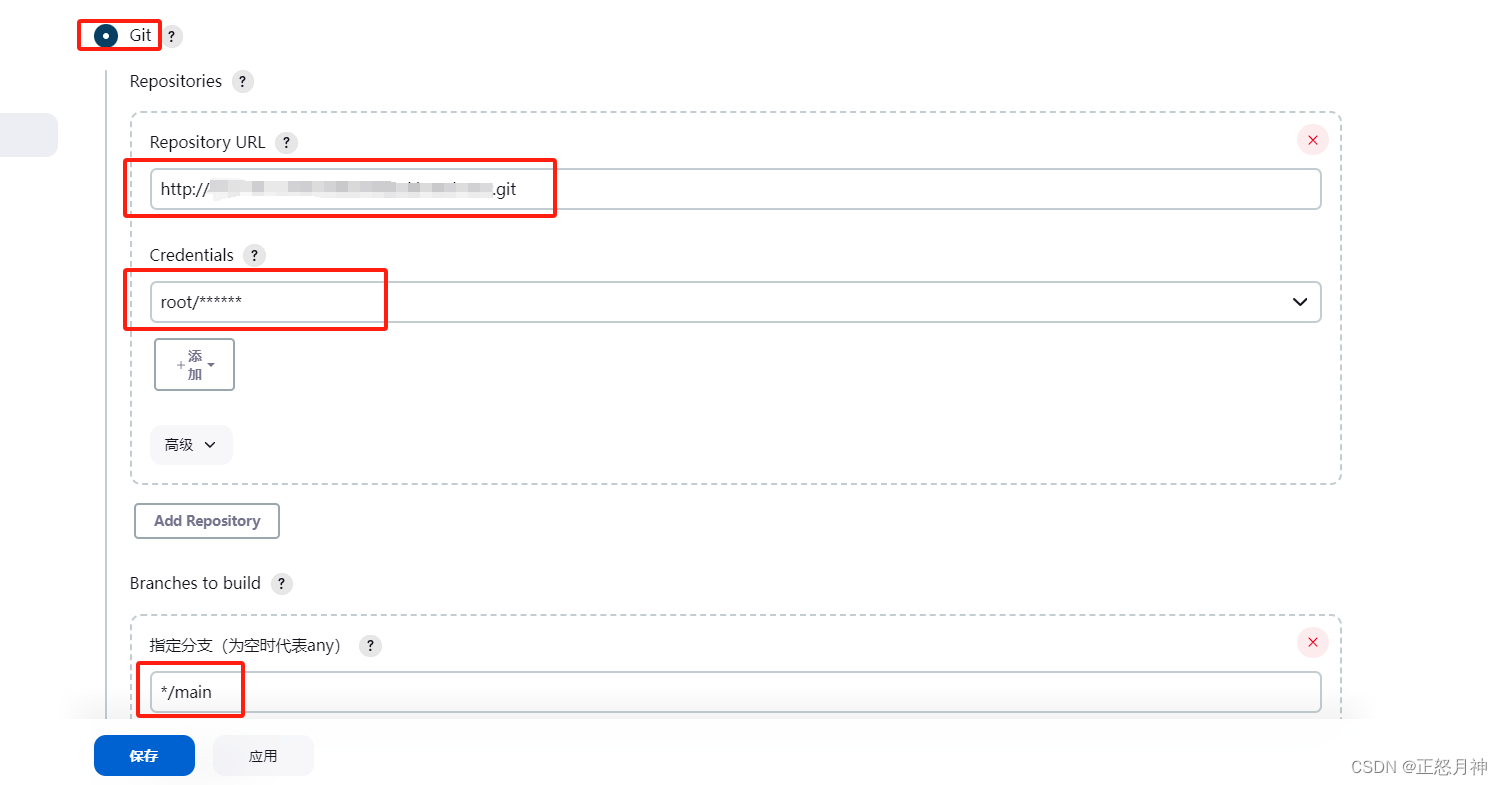
jenkins的安装教程就不说了:Jenkins docker 一键发布 (一)_jenkins 一键发布-CSDN博客 最近打算从svn切换到gitlab,所以配置了一下jenkins的git 很简单,直接上图 1 选择 Git 2 录入gitlab的http地址(由于我的git地址不是22端口&…...

Java 中的数据类型有哪些?
Java中主要有八种基本数据类型: 1、整型:byte、short、int、long 2、字符型:char 3、浮点型:float、double 4、布尔型:boolean 一、整型 Java中整型数据属于有符号数,即第一个bit位为0表示正整数&…...
基于SSM的大学学生成长系统
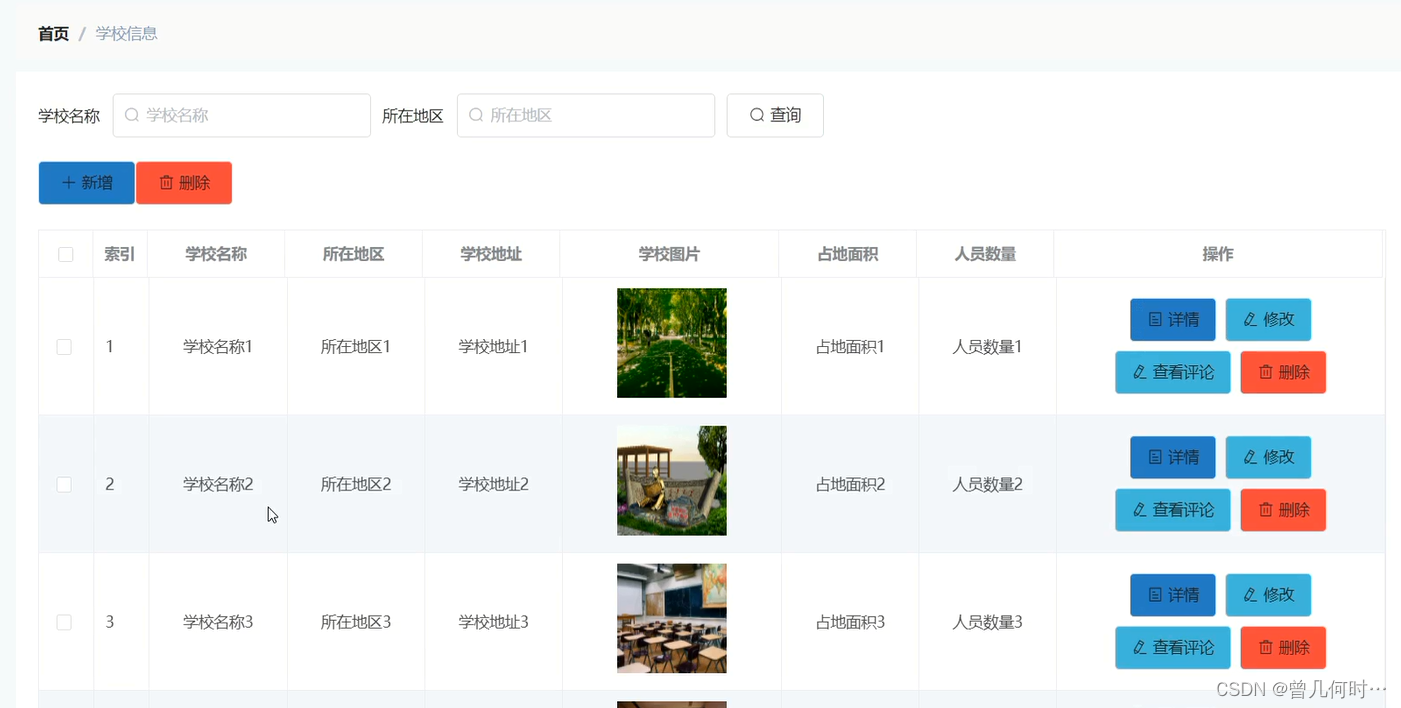
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:Vue 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目:是 目录…...

369B1860G0028 44A730240-G01 IC697ACC722B
369B1860G0028 44A730240-G01 IC697ACC722B 在NOA,一个名为MO(监控和优化)的独立领域与现有系统分开准备,数据直接从机器人、无人机和新传感器收集,例如腐蚀、声音和振动传感器。此外,现有系统中的数据通过OPC UA导入,…...

系列十一、拦截器(二)#案例演示
一、案例演示 说明:如下案例通过springboot的方式演示拦截器是如何使用的,以获取Controller中的请求参数为切入点进行演示 1.1、前置准备工作 1.1.1、pom <dependencies><!-- spring-boot --><dependency><groupId>org.spring…...
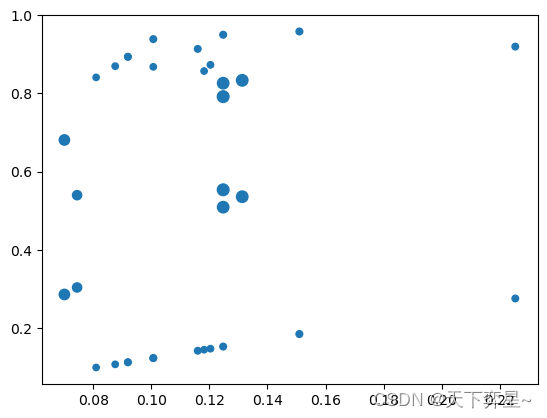
数据分析实战 | 关联规则分析——购物车分析
目录 一、数据及分析对象 二、目的及分析任务 三、方法及工具 四、数据读入 五、数据理解 六、数据预处理 七、生成频繁项集 八、计算关联度 九、可视化 一、数据及分析对象 数据集链接:Online Retail.xlsx 该数据集记录了2010年12月01日至2011年12月09日…...

maven 添加 checkstyle 插件约束代码规范
本例示例,是引用 http 链接这种在线 checkstyle.xml 文件的配置方式,如下示例: <properties><maven.checkstyle.plugin.version>3.3.0</maven.checkstyle.plugin.version><!--支持本地绝对路径、本地相对路径、HTTP远程…...

什么是MySQL的执行计划(Explain关键字)?
什么是Explain Explain被称为执行计划,在语句之前增加 explain 关键字,MySQL 会在查询上设置一个标记,模拟MySQL优化器来执行SQL语句,执行查询时,会返回执行计划的信息,并不执行这条SQL。(注意&…...

编码格式科普ASCII unicode utf-8 usc-2 GB2312
1.ASCII(标准版) 可以表示所有英文字符(包括大写和小写)和数字,长度为7bit,最多可以表示0-127 个值,2的7次方个数字。比如比如“a” 对照ASCII码的值为97(十进制)或11000…...

Pycharm中新建一个文件夹下__init__.py文件有什么用
在PyCharm中新建一个文件夹下的__init__.py文件有以下几个作用: 声明文件夹为一个Python包:__init__.py文件的存在告诉Python解释器该文件夹是一个Python包。当你导入该文件夹下的模块时,Python会将其视为一个包而不是普通的文件夹。这允许你…...

OracleBulkCopy c#批量插入oracle数据库的方法
datatable中的数据 存入oracle表中,要求 二者字段名一致,如果不一致,通过这个实现对应: bulkCopy.ColumnMappings.Add("SERVNUMBER", "SN"); 首先要引入Oracle.DataAccess.dll文件(在oracle客户端…...

046_第三代软件开发-虚拟屏幕键盘
第三代软件开发-虚拟屏幕键盘 文章目录 第三代软件开发-虚拟屏幕键盘项目介绍虚拟屏幕键盘 关键字: Qt、 Qml、 虚拟键盘、 qtvirtualkeyboard、 自定义 项目介绍 欢迎来到我们的 QML & C 项目!这个项目结合了 QML(Qt Meta-Object L…...

MySQL主从搭建,实现读写分离(基于docker)
一 主从配置原理 mysql主从配置的流程大体如图: 1)master会将变动记录到二进制日志里面; 2)master有一个I/O线程将二进制日志发送到slave; 3) slave有一个I/O线程把master发送的二进制写入到relay日志里面; 4…...

uni-app android picker选择默认月份
微信小程序选中月份后下次再点开是上次的选中的月份,而编译的android应用只默认当前月份 <picker mode"date" ref"picker" :disabled"disabled" :value"date" fields"month" change"bindDateChange&quo…...

Unity安卓打包实战指南:从环境配置到APK生成全链路排错
1. 这不是“入门教程”,而是一份写给真实开发现场的生存指南你打开Unity,新建一个3D项目,拖进一个Cube,点击Play——它动了。你松了口气,觉得“Unity好像也没那么难”。但当你把APK打包发给测试同事,对方回…...

机器学习与深度学习在地球物理勘探中的应用:基于电阻率数据预测极化率模型
1. 项目概述与核心价值在花岗岩这类地质条件复杂的地区搞勘探,最头疼的就是地下情况“看不清”。传统的电阻率(ERT)和激发极化(IP)联合反演,就像用一把刻度模糊的尺子去量一块表面坑洼不平的石头——面对高…...

机器学习赋能6G近场通信:从信道估计到波束赋形的智能革命
1. 项目概述:当6G遇见近场,为何机器学习成为破局关键?如果你关注过5G到6G的技术演进路线,会发现一个核心趋势:天线阵列的规模正在从“大规模”走向“极大规模”。这不仅仅是数量的堆砌,更是通信物理原理的一…...

信息系统项目管理师核心知识点精讲
一、项目整合管理(重点:项目章程与项目管理计划) 知识点详解: 项目整体管理是项目管理知识体系的核心,它确保项目各要素协调统一。在考试中,特别要掌握项目章程和项目管理计划的区别与联系。 项目章程是项目的“出生证明”,由项目发起人发布。它正式授权项目,赋予项…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...

基于MaixCam的延时摄影系统:从硬件选型到Python编程全解析
1. 项目概述:用MaixCam打造你的专属延时摄影工坊延时摄影,这个听起来有点专业、甚至带点“魔法”色彩的词,其实离我们并不遥远。想想看,把一朵花从含苞到绽放的几天时间,压缩成十几秒的惊艳绽放;或者把一座…...

DragonBones与Godot集成:骨骼动画的可编程化实践
1. 为什么在Godot里用DragonBones不是“锦上添花”,而是“绕不开的刚需” 去年上线一个横版动作手游Demo时,美术团队交来一套20个角色、每个角色含8套动画(待机/跑动/跳跃/攻击/受击/死亡/闪避/必杀)的Spine资源。我兴冲冲导入God…...

TVA注意力层INT8量化配置技巧
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

3分钟告别英文恐惧:Android Studio中文界面轻松切换指南
3分钟告别英文恐惧:Android Studio中文界面轻松切换指南 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 你是否曾经因…...

从API调用成功率看Taotoken服务的稳定性与容灾表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从API调用成功率看Taotoken服务的稳定性与容灾表现 在将大模型能力集成到自动化流程或日常开发工具链时,服务的稳定性和…...