仿真实现lio_sam建图和ndt_matching定位
文章目录
- 一、仿真环境
- 二、lio_sam建图
- 1.修改配置文件
- 2.开始建图
- 三、ndt_matching定位
- 1.新建启动文件
- 2.启动
- 总结
一、仿真环境
使用现有开源的仿真环境—从零开始搭建一台ROS开源迷你无人车,作者已经配置好小车模型以及gazebo环境,imu频率已改为200HZ,文中也有详细的说明,这里就不再介绍。
启动仿真
roslaunch steer_mini_gazebo steer_mini_sim_sensors_VLP16_lio_sam.launch
 话题如下:
话题如下:
/ackermann_steering_controller/cmd_vel
/ackermann_steering_controller/odom
/clock
/gains/left_rear_joint/parameter_descriptions
/gains/left_rear_joint/parameter_updates
/gains/right_rear_joint/parameter_descriptions
/gains/right_rear_joint/parameter_updates
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/imu/data
/joint_states
/rosout
/rosout_agg
/tf
/tf_static
/velodyne_points控制小车移动,打开一个终端,录制所有话题(也可录制需要的话题),会自动在终端所在的文件夹下根据当前时间产生bag文件。
rosbag record -a
二、lio_sam建图
lio_sam的安装测试可参考Lego-LOAM和LIO_SAM的使用及地图的处理
1.修改配置文件
在LIO-SAM/config下的params.yaml文件中
修改为自己小车的话题
# TopicspointCloudTopic: "/velodyne_points" imuTopic: "/imu/data" odomTopic: "/odometry/imu" gpsTopic: "odometry/gpsz"
修改保存路径
# Export settingssavePCD: true savePCDDirectory: "/Downloads/"
修改imu到雷达的坐标变换
# Extrinsics: T_lb (lidar -> imu)extrinsicTrans: [0.0, 0.0, 0.0]extrinsicRot: [1, 0, 0,0, 1, 0,0, 0, 1]extrinsicRPY: [1, 0, 0,0, 1, 0,0, 0, 1]
其它的保持默认即可。
2.开始建图
roslaunch lio_sam run.launch rosbag play your.bag

保存的PCD—GlobalMap.pcd

三、ndt_matching定位
1.新建启动文件
使用Autoware.ai中的ndt_matching定位模块。为了适配前方,需要对应仿真的数据进行如下修改
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/config路径:
新建headless_setup_steer_mini.yaml 内容如下:
tf_x: 0
tf_y: 0
tf_z: 0.115
tf_yaw: 0
tf_pitch: 0
tf_roll: 0localizer: velodyne
use_sim_time: false
.autoware/data/tf 路径:
新建tf_steer_mini.launch
<launch>
<!-- worldからmapへのtf -->
<node pkg="tf2_ros" type="static_transform_publisher" name="world_to_map" args="0 0 0 0 0 0 /world /map" />
<!-- mapからmobilityへのtf -->
<!-- <node pkg="tf2_ros" type="static_transform_publisher" name="map_to_mobility" args="0 0 0 0 0 0 /map /mobility" />-->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_velodyne" args="0 0 0.115 0 0 0 /base_link /velodyne" />
</launch>
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo路径下:
新建my_map_steer_mini.launch内容如下
<launch><rosparam command="load" file="$(find autoware_quickstart_examples)/config/headless_setup_steer_mini.yaml" /><include file="$(env HOME)/.autoware/data/tf/tf_steer_mini.launch"/><node pkg="map_file" type="points_map_loader" name="points_map_loader" args="noupdate $(env HOME)/.autoware/data/map/pointcloud_map/GlobalMap.pcd"/></launch>
autoware.ai/src/autoware/core_perception/lidar_localizer/launch路径下:
新建ndt_matching_steer_mini.launch内容如下:
<launch><arg name="method_type" default="0" /> <!-- pcl_generic=0, pcl_anh=1, pcl_anh_gpu=2, pcl_openmp=3 --><arg name="use_gnss" default="0" /><arg name="use_odom" default="true" /><arg name="use_imu" default="true" /><arg name="imu_upside_down" default="false" /><arg name="imu_topic" default="/imu/data" /><arg name="queue_size" default="1" /><arg name="offset" default="linear" /><arg name="get_height" default="false" /><arg name="use_local_transform" default="false" /><arg name="sync" default="false" /><arg name="output_log_data" default="false" /><arg name="gnss_reinit_fitness" default="500.0" /><node pkg="lidar_localizer" type="ndt_matching" name="ndt_matching" output="log"><param name="method_type" value="$(arg method_type)" /><param name="use_gnss" value="$(arg use_gnss)" /><param name="use_odom" value="$(arg use_odom)" /><param name="use_imu" value="$(arg use_imu)" /><param name="imu_upside_down" value="$(arg imu_upside_down)" /><param name="imu_topic" value="$(arg imu_topic)" /><param name="queue_size" value="$(arg queue_size)" /><param name="offset" value="$(arg offset)" /><param name="get_height" value="$(arg get_height)" /><param name="use_local_transform" value="$(arg use_local_transform)" /><param name="output_log_data" value="$(arg output_log_data)" /><param name="gnss_reinit_fitness" value="$(arg gnss_reinit_fitness)" /><remap from="/points_raw" to="/sync_drivers/points_raw" if="$(arg sync)" /></node></launch>
同时修改ndt_matching.cpp中的里程计接收话题
// ros::Subscriber odom_sub = nh.subscribe("/vehicle/odom", _queue_size * 10, odom_callback); //defaultros::Subscriber odom_sub = nh.subscribe("/ackermann_steering_controller/odom", _queue_size * 10, odom_callback);
autoware.ai/src/autoware/core_perception/points_downsampler/launch路径下:
新建points_downsample_steer_mini.launch
<launch><arg name="sync" default="false" /><arg name="node_name" default="voxel_grid_filter" /><arg name="points_topic" default="/velodyne_points" /><arg name="output_log" default="false" /><arg name="measurement_range" default="200" /><node pkg="points_downsampler" name="$(arg node_name)" type="$(arg node_name)"><param name="points_topic" value="$(arg points_topic)" /><remap from="/points_raw" to="/sync_drivers/points_raw" if="$(arg sync)" /><param name="output_log" value="$(arg output_log)" /><param name="measurement_range" value="$(arg measurement_range)" /></node>
</launch>
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo路径下:
新建my_localization_steer_mini.launch
<launch><!-- setting path parameter --><arg name="get_height" value="true" /><!-- Setup <include file="$(find runtime_manager)/launch_files/setup_tf.launch"><arg name="x" value="1.2" /><arg name="y" value="0.0" /><arg name="z" value="2.0" /><arg name="yaw" value="0.0" /><arg name="pitch" value="0.0" /><arg name="roll" value="0.0" /><arg name="frame_id" value="/base_link" /><arg name="child_frame_id" value="/velodyne" /><arg name="period_in_ms" value="10"/></include>--><!-- <include file="$(find vehicle_description)/launch/vehicle_model.launch" /> --><!-- points downsampler --><include file="$(find points_downsampler)/launch/points_downsample_steer_mini.launch" /><!-- nmea2tfpose --><!-- <include file="$(find gnss_localizer)/launch/nmea2tfpose.launch"/> --><!-- ndt_matching --><include file="$(find lidar_localizer)/launch/ndt_matching_steer_mini.launch"><arg name="get_height" value="$(arg get_height)" /></include></launch>
2.启动
roslaunch autoware_quickstart_examples my_map_steer_mini.launch
roslaunch autoware_quickstart_examples my_localization_steer_mini.launch
rviz
给定初始位姿(必须)
rosbag play your.bag效果图:


总结
以上实现了仿真场景下使用lio_sam建图以及ndt_matching定位的过程,仅仅作为测试使用,存在仿真场景较小,没有在机器人模型中添加gps数据的问题,整体上达到定位的要求。
相关文章:
仿真实现lio_sam建图和ndt_matching定位
文章目录 一、仿真环境二、lio_sam建图1.修改配置文件2.开始建图 三、ndt_matching定位1.新建启动文件2.启动 总结 一、仿真环境 使用现有开源的仿真环境—从零开始搭建一台ROS开源迷你无人车,作者已经配置好小车模型以及gazebo环境,imu频率已改为200HZ…...
IDEA取消git对项目的版本控制
前言 前几天新建项目的时候不小心选了个git仓库,导致这个测试项目一直被git管理着。 解决办法 1 右键项目 选择打开资源目录 2 删除.git文件 把目录下的.git文件删掉 3 删除idea中的git管理 删除完.git文件后,进入idea,右下角会有这样的提…...

如何聪明地编写测试
作者|Maxim Schepelin Booking公司软件开发工程师 编译整理|TesterHome 以下为作者观点: 在我(作者)的职业生涯中,我多次看到团队如何开始自动化测试,当然并非所有尝试都成功。在这篇文章中…...

CF1866M Mighty Rock Tower
CF题面 luogu题面 期望题。 题目大意:一个人在搭积木,每次堆叠可能成功或失败,失败可能导致其下面连续的若干块掉落。给定搭每一块时失败的概率,求堆叠完成的期望次数。 具体的,假设当前正在堆叠第 i 块,…...
【漏洞复现】Apache_Tomcat7+ 弱口令 后台getshell漏洞
感谢互联网提供分享知识与智慧,在法治的社会里,请遵守有关法律法规 文章目录 1.1、漏洞描述1.2、漏洞等级1.3、影响版本1.4、漏洞复现1、基础环境2、漏洞扫描3、漏洞验证 说明内容漏洞编号漏洞名称Tomcat7 弱口令 && 后台getshell漏洞漏洞评级高…...
2023-11-7 OpenAI 45 分钟发布会:演示关于 GPT Store 构建 GPT、零代码创建 AI Agent
本心、输入输出、结果 文章目录 2023-11-7 OpenAI 45 分钟发布会:演示关于 GPT Store 构建 GPT、零代码创建 AI Agent前言Sam Altman 正在创建一个「创业导师 GPT」零代码创建 AI AgentAssistants API 封装的能力包括 Sam Altman 对发布会总结相关链接弘扬爱国精神 …...
嵌入式系统中的FPGA
举个栗子 假设你有一台智能家居系统,其中的FPGA可以被类比为智能家居中的中央控制器。 智能家居系统: 定制家居逻辑: 你希望智能家居系统能够根据你的生活习惯、时间表和喜好自动控制灯光、温度、窗帘等设备。就像FPGA中可以根据需求重新配置…...

String,StringBulider,StringBuffer的简单说明
目录 1.String 2.StringBuffer 3.StringBuilder 4.线程安全的验证 1.String String是声明在java.lang下的一个类。 String被定义为final,表示不能被继承。内部定义了final char value[]用于存储字符串数据,所以String对象的值是不可改变的。每次对S…...
)
Python编程题集(第一部分基本语法基础)
Demo01 摄氏温度转化为华氏温度 题目描述: 输入一个摄氏温度的值,将它转变为华氏温度,并将结果输出 转换的公式为如下:fahrenheit (9 / 5 ) * celsius 32 输入输出描述 输入一个值表示摄氏温度celsius 输出华氏温度fahren…...
手动关闭PS中的TopazStudio2的登录窗口
2021 adobe photoshop Topaz Studio 2 不是使用防火墙出站规则,是手动关闭的解决方案 点击社区-切换用户,登录窗口会出现X,可以手动关闭...

[elastic 8.x]java客户端连接elasticsearch与操作索引与文档
初始化客户端 引入相关依赖 <dependency><groupId>co.elastic.clients</groupId><artifactId>elasticsearch-java</artifactId><version>8.10.2</version> </dependency>初始化客户端 为了方便演示,我关闭了ela…...

接口测试总结
本文主要分为两个部分: 第一部分:主要从问题出发,引入接口测试的相关内容并与前端测试进行简单对比,总结两者之前的区别与联系。但该部分只交代了怎么做和如何做?并没有解释为什么要做? 第二部分࿱…...

计算机基础知识44
overflow溢出属性 visible:默认值,内容不会被修剪,会呈现在元素框之外。hidden:内容会被修剪,并且其余内容是不可见的。scroll:内容会被修剪,但是浏览器会显示滚动条以便查看其余的内容。auto: …...
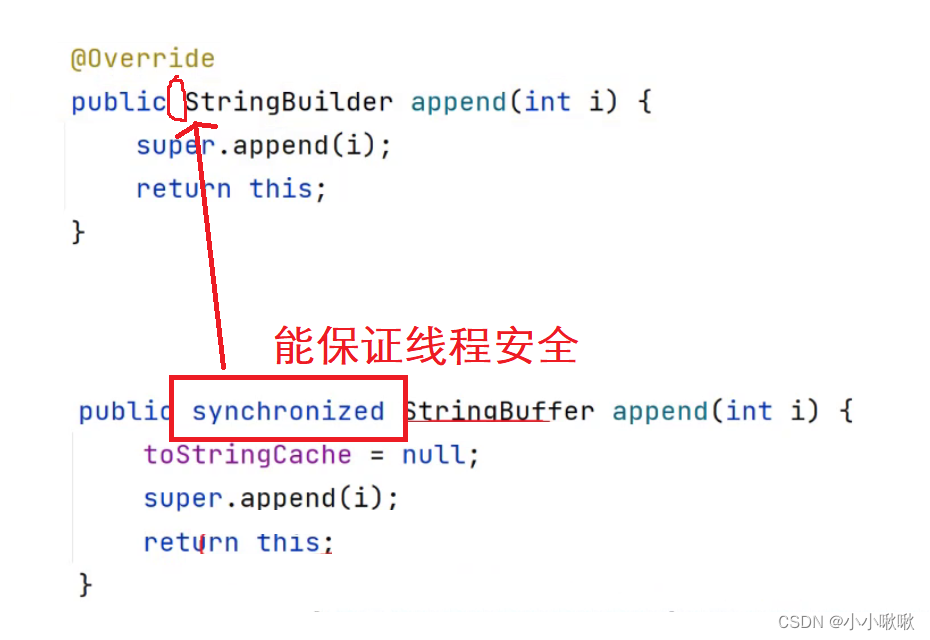
【StringBuilder和StringBuffer】
文章目录 StringBuilder和StringBufferString类、StringBuilder和StringBuffer的区别 StringBuilder和StringBuffer的区别StringBuilder 字符串逆置 StringBuilder和StringBuffer String类、StringBuilder和StringBuffer的区别 String类的特点是不可变性,所以Stri…...

用java代码实现security
Java中security的实现主要涉及到以下几个方面: 认证(Authentication) 认证是确认用户身份的过程,Java中提供了不同的认证机制来保护应用程序不被未授权的用户访问。常用的认证机制有以下几种: 基于口令的认证:要求用户输入用户名…...

【Java 进阶篇】Java Session 原理及快速入门
大家好,欢迎来到本篇博客。今天,我们将探讨Java Web开发中一个重要而令人兴奋的概念,即Session(会话)。Session是一种在Web应用程序中跟踪用户状态和数据的机制。我们将深入了解Session的原理,并通过示例来…...
MoveFunsDAO 星航计划|从Move入门Web3与深入实践「公益课堂」
Move 语言作为最安全的编程语言之一,在资产的安全性和保护方面有着显著优势,被寄予引领 Web3 世界的全新叙事的厚望。 随着 Sui 在今年五月主网上线,它为 Move 生态带来一股新的浪潮。上线以来,Sui 公链的开发活跃度持续数月位居…...
)
RabbitMQ常用命令(一)
启动和关闭 1、启动RabbitMQ rabbitmq-server start & 注意:这里可能会出现错误,错误原因是/var/lib/rabbitmq/.erlang.cookie文件权限不够。 解决方案对这个文件授权 chown rabbitmq:rabbitmq /var/lib/rabbitmq/.erlang.cookie chmod 400 /va…...

在教育领域,AI垂直大模型应用场景总结!
1. 智能教育助手: 这种模型可以通过语音或文本与学生进行交互,提供个性化的学习建议和答疑解惑。根据学生的学习习惯和知识水平,推荐适合的学习资源,并提供实时的辅导和反馈。 2. 智能作文批改助手: 这种模型可以对…...
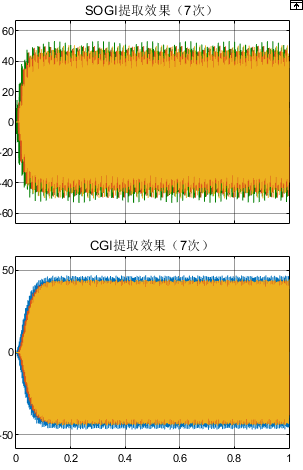
基于级联广义积分器(CGI)的谐波信号提取MATLAB仿真
微❤关注“电气仔推送”获得资料(专享优惠) 此方法可用于信号检测、虚拟阻抗合成、锁相环等方面。 在现有的信号提取方法中,众多学者采用了SOGI法、LPF法以及正交信号发生器等方法。当输入信号中不存在直流分量,只有谐波分量时&…...

SWF逆向工程认证培训师手册:基于JPEXS Free Flash Decompiler的教学指南
SWF逆向工程认证培训师手册:基于JPEXS Free Flash Decompiler的教学指南 【免费下载链接】jpexs-decompiler JPEXS Free Flash Decompiler 项目地址: https://gitcode.com/gh_mirrors/jp/jpexs-decompiler JPEXS Free Flash Decompiler是一款开源的Flash SWF…...

人工智能毕业设计2026方向集合
0 选题推荐 - 人工智能篇 毕业设计是大家学习生涯的最重要的里程碑,它不仅是对四年所学知识的综合运用,更是展示个人技术能力和创新思维的重要过程。选择一个合适的毕业设计题目至关重要,它应该既能体现你的专业能力,又能满足实际…...
)
别再让AI失忆了!手把手教你用Mem0为ChatGPT添加长期记忆(附Next.js实战代码)
为Next.js聊天应用注入长期记忆:Mem0集成实战指南 当你的AI助手开始记住用户的咖啡偏好和生日祝福时,整个交互体验会发生质的变化。本文将带你从零开始,在Next.js应用中实现这种"记忆魔法"。 1. 环境准备与Mem0初始化 首先创建一个…...

java自动带注释
...

告别树莓派溢价!Radxa ROCK 5A 8GB版开箱实测,652元真香体验与避坑指南
652元平替树莓派4B?Radxa ROCK 5A深度体验与实战避坑手册 当树莓派4B的价格突破900元大关时,许多开发者开始寻找更具性价比的替代方案。Radxa ROCK 5A的出现恰逢其时——这款搭载RK3588S芯片的单板计算机不仅性能翻倍,价格却仅为652元&#…...

GitHub访问加速终极指南:5分钟告别龟速访问的完整解决方案
GitHub访问加速终极指南:5分钟告别龟速访问的完整解决方案 【免费下载链接】fetch-github-hosts 🌏 同步github的hosts工具,支持多平台的图形化和命令行,内置客户端和服务端两种模式~ | Synchronize GitHub hosts tool, support m…...
)
Excel双坐标折线图保姆级教程:用散点图搞定多组数据对比(附详细步骤图)
Excel双坐标折线图进阶指南:用散点图实现精准数据可视化 在数据分析的日常工作中,我们经常遇到需要同时展示两组量纲差异巨大的数据——比如销售额(百万级)和增长率(百分比)。传统的双坐标折线图虽然能解决…...

Qwen2.5-VL-7B-Instruct实操手册:对话历史自动保存+一键清空功能详解
Qwen2.5-VL-7B-Instruct实操手册:对话历史自动保存一键清空功能详解 1. 开篇:你的全能视觉助手来了 今天给大家介绍一个特别实用的工具——基于Qwen2.5-VL-7B-Instruct多模态大模型的视觉交互工具。这个工具专门为RTX 4090显卡优化过,用上了…...

番茄矮砧密植:水肥一体化系统铺设全指南
大棚里,老周的番茄挂果累累,红绿相间。“这套系统让我的番茄产量翻了一番,”他指着地里的滴灌设备说,“不仅省工省力,品质还特别稳定。”认识番茄矮砧密植番茄矮砧密植,简单来说就是选用矮生品种࿰…...
)
【Python多解释器隔离终极指南】:20年CTO亲授GIL绕过术、内存隔离与并发安全实战(附可运行代码库)
第一章:Python多解释器隔离的核心概念与演进脉络Python长期以来以全局解释器锁(GIL)为标志性设计,单进程内仅能存在一个活跃的CPython解释器状态(PyInterpreterState),这使得“多解释器”长期处…...