贰[2],OpenCV函数解析
1,imread:图片读取
CV_EXPORTS_W Mat imread( const String& filename, int flags = IMREAD_COLOR );//参数1(filename):文件地址
//参数2(flags):读取标志
注:ImreadModes,参数2(flags)枚举定义
enum ImreadModes {
IMREAD_UNCHANGED = -1, IMREAD_GRAYSCALE = 0, IMREAD_COLOR = 1, IMREAD_ANYDEPTH = 2, IMREAD_ANYCOLOR = 4, IMREAD_LOAD_GDAL = 8, IMREAD_REDUCED_GRAYSCALE_2 = 16, IMREAD_REDUCED_COLOR_2 = 17,IMREAD_REDUCED_GRAYSCALE_4 = 32, IMREAD_REDUCED_COLOR_4 = 33, IMREAD_REDUCED_GRAYSCALE_8 = 64, IMREAD_REDUCED_COLOR_8 = 65, IMREAD_IGNORE_ORIENTATION = 128 };/*
IMREAD_UNCHANGED: 如果设置,将加载的图像原样返回(如果有alpha通道,否则会被裁剪)。忽略EXIF方向。
IMREAD_GRAYSCALE: 如果设置,总是将图像转换为单通道灰度图像(编解码器内部转换)。
IMREAD_COLOR: 如果设置,总是将图像转换为3通道BGR彩色图像。
IMREAD_ANYDEPTH: 如果设置,当输入具有相应的深度时,返回16位/32位图像,否则将其转换为8位。
IMREAD_ANYCOLOR: 如果设置,图像以任何可能的颜色格式读取。
IMREAD_LOAD_GDAL: 如果设置,使用gdal驱动程序加载图像。
IMREAD_REDUCED_GRAYSCALE_2 到 IMREAD_REDUCED_GRAYSCALE_8: 这些标志将图像转换为单通道灰度图像,并将图像大小减少一半或四分之一或八分之一。
IMREAD_REDUCED_COLOR_2 到 IMREAD_REDUCED_COLOR_8: 这些标志将图像转换为3通道BGR彩色图像,并将图像大小减少一半或四分之一或八分之一。
IMREAD_IGNORE_ORIENTATION: 如果设置,不根据EXIF的方向标志旋转图像。
*/2,imwrite:图片保存
CV_EXPORTS_W bool imwrite( const String& filename, InputArray img,const std::vector<int>& params = std::vector<int>());//参数1(filename):文件地址
//参数2(img):图片数据
//参数3(params ):为特定格式保存的参数编码
注:**ImwriteFlags** ,参数3(params)枚举定义
enum ImwriteFlags {IMWRITE_JPEG_QUALITY = 1, IMWRITE_JPEG_PROGRESSIVE = 2, IMWRITE_JPEG_OPTIMIZE = 3, IMWRITE_JPEG_RST_INTERVAL = 4, IMWRITE_JPEG_LUMA_QUALITY = 5, IMWRITE_JPEG_CHROMA_QUALITY = 6, IMWRITE_JPEG_SAMPLING_FACTOR = 7, IMWRITE_PNG_COMPRESSION = 16, IMWRITE_PNG_STRATEGY = 17, IMWRITE_PNG_BILEVEL = 18, IMWRITE_PXM_BINARY = 32, IMWRITE_EXR_TYPE = (3 << 4) + 0, IMWRITE_EXR_COMPRESSION = (3 << 4) + 1, IMWRITE_EXR_DWA_COMPRESSION_LEVEL = (3 << 4) + 2, IMWRITE_WEBP_QUALITY = 64, /IMWRITE_HDR_COMPRESSION = (5 << 4) + 0, IMWRITE_PAM_TUPLETYPE = 128,IMWRITE_TIFF_RESUNIT = 256,IMWRITE_TIFF_XDPI = 257,IMWRITE_TIFF_YDPI = 258,IMWRITE_TIFF_COMPRESSION = 259,IMWRITE_JPEG2000_COMPRESSION_X1000 = 272,IMWRITE_AVIF_QUALITY = 512,IMWRITE_AVIF_DEPTH = 513,IMWRITE_AVIF_SPEED = 514 };/*
IMWRITE_JPEG_QUALITY:用于JPEG图像,表示质量等级,值范围从0到100,其中100表示最高质量。默认值为95。
IMWRITE_JPEG_PROGRESSIVE:启用JPEG渐进式扫描,值为0或1,默认值为False。
IMWRITE_JPEG_OPTIMIZE:优化JPEG图像,值为0或1,默认值为False。
IMWRITE_JPEG_RST_INTERVAL:JPEG图像中重新同步标记的间隔,值范围从0到65535,默认值为0(无重新同步)。
IMWRITE_JPEG_LUMA_QUALITY:单独的亮度质量级别,值范围从0到100,默认值为-1(不使用)。
IMWRITE_JPEG_CHROMA_QUALITY:单独的色度质量级别,值范围从0到100,默认值为-1(不使用)。
IMWRITE_JPEG_SAMPLING_FACTOR:用于JPEG的采样因子,参见cv::ImwriteJPEGSamplingFactorParams。
IMWRITE_PNG_COMPRESSION:用于PNG的压缩级别,值范围从0到9。较高的值表示较小的尺寸和更长的压缩时间。当指定此标志时,策略更改为IMWRITE_PNG_STRATEGY_DEFAULT(Z_DEFAULT_STRATEGY)。默认值为1(最佳速度设置)。
IMWRITE_PNG_STRATEGY:PNG的压缩策略,可以是cv::ImwritePNGFlags中的一个值,默认值为IMWRITE_PNG_STRATEGY_RLE。
IMWRITE_PNG_BILEVEL:二进制级别的PNG,值为0或1,默认值为0。
IMWRITE_PXM_BINARY:对于PPM、PGM或PBM,可以是一个二进制格式标志,值为0或1。默认值为1。
*/3,imshow:图片显示
CV_EXPORTS_W void imshow(const String& winname, InputArray mat);//参数1(winname):窗口名称
//参数2(img):图片数据4,cvtColor:颜色空间转换
实现**RGB**颜色空间转**HSV/HSI/灰度**等颜色空间。
CV_EXPORTS_W void cvtColor( InputArray src, OutputArray dst, int code, int dstCn = 0 );//参数1(src):原图
//参数2(dst):处理后的图
//参数3(code):颜色空间转换标识符
//参数4(dstCn):处理后图片的通道数,=0,则和原图相同。
注:**ColorConversionCodes** ,参数3(code)对应枚举定义
enum ColorConversionCodes {COLOR_BGR2BGRA = 0, //!< add alpha channel to RGB or BGR imageCOLOR_RGB2RGBA = COLOR_BGR2BGRA,......
};5,ellipse:画椭圆
两个重载函数
函数1:
CV_EXPORTS_W void ellipse(InputOutputArray img, Point center, Size axes,double angle, double startAngle, double endAngle,const Scalar& color, int thickness = 1,int lineType = LINE_8, int shift = 0);//参数1(img):待绘制的图像
//参数2(center):椭圆中心点
//参数3(axes):长短轴尺寸
//参数4(angle):角度
//参数5(startAngle) :弧度段起始角度
//参数6(endAngle) :弧度段结束角度
//参数7(color):椭圆颜色
//参数8(thickness ):画笔线宽
//参数9(lineType ):画笔线类型
//参数10(shift ):绘制精度,默认为0(单精度)
注:startAngle=0,endAngle=360,整个椭圆
函数2:
CV_EXPORTS_W void ellipse(InputOutputArray img, const RotatedRect& box, const Scalar& color,int thickness = 1, int lineType = LINE_8);//参数1(img):待绘制的图像
//参数2(center):椭圆的形状,RotatedRect,有三个属性:angle center size
//参数3(color):椭圆颜色
//参数4(thickness ):线宽
//参数5(lineType ):线类型
注:**LineTypes** 参数5(lineType)枚举定义
enum LineTypes {FILLED = -1,LINE_4 = 4, //!< 4-connected lineLINE_8 = 8, //!< 8-connected lineLINE_AA = 16 //!< antialiased line
};6,circle:画圆
CV_EXPORTS_W void circle(InputOutputArray img, Point center, int radius,const Scalar& color, int thickness = 1,int lineType = LINE_8, int shift = 0);//参数1(img):待绘制的图像
//参数2(center):圆心坐标
//参数3(color):圆的半径
//参数4(color):椭圆颜色
//参数5(thickness ):画笔线宽
//参数6(lineType ):画笔线类型
//参数7(shift ):绘制精度,默认为0(单精度)
注:thickness =-1,为实心圆
7,fillPoly:画多边形
两个重载函数
函数1:
CV_EXPORTS_W void fillPoly(InputOutputArray img, InputArrayOfArrays pts,const Scalar& color, int lineType = LINE_8, int shift = 0,Point offset = Point() );//参数1(img):待绘制的图像
//参数2(pts):顶点集
//参数3(color):椭圆颜色
//参数4(lineType ):画笔线类型
//参数5(shift ):绘制精度,默认为0(单精度)
//参数6(offset ):绘制的偏移量,默认为(0,0)函数2:
CV_EXPORTS void fillPoly(InputOutputArray img, const Point** pts,const int* npts, int ncontours,const Scalar& color, int lineType = LINE_8, int shift = 0,Point offset = Point() );//参数1(img):待绘制的图像
//参数2(pts):顶点集
//参数3(npts):多边形顶点数
//参数4(ncontours):多边形数量
//参数5(color):椭圆颜色
//参数6(lineType ):画笔线类型
//参数7(shift ):绘制精度,默认为0(单精度)
//参数8(offset ):绘制的偏移量,默认为(0,0)8,line:画线
CV_EXPORTS_W void line(InputOutputArray img, Point pt1, Point pt2, const Scalar& color,int thickness = 1, int lineType = LINE_8, int shift = 0);
//参数1(img):待绘制的图像
//参数2(pt1):线起点
//参数3(pt2):线终点
//参数4(color):线颜色
//参数5(thickness ):画笔线宽
//参数6(lineType ):画笔线类型
//参数7(shift ):绘制精度,默认为0(单精度)9,LUT:查表
查表变换,用于大数据图像的图元进行批量操作,牺牲空间换取时间
CV_EXPORTS_W void LUT(InputArray src, InputArray lut, OutputArray dst);
//参数1(src):原图
//参数2(lut):表
//参数3(dst):处理后的图10,getTickCount:获取电脑当前时钟数
CV_EXPORTS_W int64 getTickCount();11,getTickFrequency:获取CPU,1秒的走过的时钟周期
CV_EXPORTS_W double getTickFrequency();//double start = cv::getTickCount();
//double interval = cv::getTickCount() - start;
//double second=interval / cv::getTickFrequency(); // 结果单位:秒12,addWeighted:图像混合
CV_EXPORTS_W void addWeighted(InputArray src1, double alpha, InputArray src2,double beta, double gamma, OutputArray dst, int dtype = -1);
//参数1(src1):图像1
//参数2(alpha):图像1权重
//参数3(src2):图像2
//参数4(beta):图像2权重
//参数5(gamma):加到权重总和上的值
//参数6(dst):处理后图像
//参数7(dtype ):图像深度,-1和图像1的深度相同
//输出图像图元i,dst[i] = src1[i] * alpha + src2[i ] * beta + gamma;
注:图像1(src1)和图像2(src2)类型和尺寸需要相同
13,split:通道分离
CV_EXPORTS_W void split(InputArray m, OutputArrayOfArrays mv);//参数1(m):多通道图像
//参数2(mv):单通道图像数组14,merge:通道合并
CV_EXPORTS_W void merge(InputArrayOfArrays mv, OutputArray dst)//参数1(mv):单通道图像数组
//参数2(m):多通道图像15,dft:离散傅里叶变换
CV_EXPORTS_W void dft(InputArray src, OutputArray dst, int flags = 0, int nonzeroRows = 0);//参数1(src):原图
//参数2:处理图像
//参数3:转换标志
//参数4:非零行注:**DftFlags** 参数3(flags)枚举定义
enum DftFlags {DFT_INVERSE = 1,DFT_SCALE = 2,DFT_ROWS = 4,DFT_COMPLEX_OUTPUT = 16,DFT_REAL_OUTPUT = 32,DFT_COMPLEX_INPUT = 64,DCT_INVERSE = DFT_INVERSE,DCT_ROWS = DFT_ROWS
};/*
DFT_INVERSE: 这个值用于指示需要进行逆DFT变换,逆DFT变换是将频域表示转换回时域表示的过程。
DFT_SCALE: 这个值用于指示在进行DFT变换后需要对输出进行缩放。在某些情况下,为了保持数据的精度,需要在变换后对输出进行缩放,输出的结果都会以l/N进行缩放,通常会结合DFT_INVERSE一起使用。
DFT_ROWS: 这个值用于指示在进行DFT变换时,按行进行运算。对输入矩阵的每行进行正向或反向的变换,此标识符可以在处理多种矢量的时候用于减小资源开销,这些处理常常是三维或高维变换等复杂操作
DFT_COMPLEX_OUTPUT: 这个值用于指示DFT变换的输出结果是复数形式的。在频域变换中,输出通常可以是实数或复数形式。
DFT_REAL_OUTPUT: 这个值用于指示DFT变换的输出结果是实数形式的。在某些情况下,我们可能只关心频域表示的实部,而不需要虚部,这时可以使用这个选项。
DFT_COMPLEX_INPUT: 这个值用于指示输入给DFT变换的数据是复数形式的。在频域变换中,输入数据可以是实数或复数形式。
DCT_INVERSE: 这个值与DFT_INVERSE相同,用于指示需要进行逆DCT变换。逆DCT变换是将频域表示转换回时域表示的过程。
DCT_ROWS: 这个值与DFT_ROWS相同,用于指示在进行DCT变换时,按行进行运算。
*/16,getOptimalDFTSize:获取傅里叶最佳尺寸
CV_EXPORTS_W int getOptimalDFTSize(int vecsize);//参数1(vecsize):尺寸,即图片的rows,cols
//离散傅里叶变换的运行速度与图片的尺寸有很大关系。当图像的尺寸是 2、 3、 5的整数倍时,计算速度最快。17,copyMakeBorder:扩展图像边界
CV_EXPORTS_W void copyMakeBorder(InputArray src, OutputArray dst,int top, int bottom, int left, int right,int borderType, const Scalar& value = Scalar() );//参数1(src):原图
//参数2(dst):处理后图
//参数3(top):原图像上方扩充的像素
//参数4(bottom):原图像下方扩充的像素
//参数5(left):原图像左方扩充的像素
//参数6(right):原图像右方扩充的像素
//参数7(borderType):边界类型
//参数8(value):当 borderType取值为 BORDER CONSTANT时,这个参数表示边界值18,magnitude:计算二位矢量幅值
CV_EXPORTS_W void magnitude(InputArray x, InputArray y, OutputArray magnitude);//参数1(x):矢量浮点型X坐标值,实部
//参数1(y):矢量浮点型Y坐标值,虚部
//参数1(magnitude):输出的幅值19,normalize:矩阵归一化
normalize函数的作用是将数据归一化到指定的范围,将数据的分布变得更加集中,减少数据的波动性,同时也可以提高模型的训练速度和准确性
CV_EXPORTS_W void normalize( InputArray src, InputOutputArray dst, double alpha = 1, double beta = 0,int norm_type = NORM_L2, int dtype = -1, InputArray mask = noArray());//参数1(src):原矩阵
//参数2(dst):处理后的矩阵
//参数3(alpha):归一化的参数
//参数4(beta):归一化的参数
//参数5(norm_type):归一化类型
//参数6(dtype):矩阵类型
//参数7(mask):掩膜enum NormTypes {NORM_INF = 1,NORM_L1 = 2,NORM_L2 = 4,NORM_L2SQR = 5,NORM_HAMMING = 6,NORM_HAMMING2 = 7,NORM_TYPE_MASK = 7, NORM_RELATIVE = 8, NORM_MINMAX = 32 };NORM_INF: 这可能是无穷范数(L-inf norm),在数学中常用于量化向量或矩阵的“大小”。对于向量,它计算的是向量元素绝对值的最大值;对于矩阵,它计算的是矩阵中所有子矩阵元素绝对值的最大值。
NORM_L1: 这可能是L1范数(L-1 norm),它计算的是向量元素绝对值的总和。
NORM_L2: 这是L2范数(L-2 norm),也称为欧几里得范数,它计算的是向量元素平方和的平方根。
NORM_L2SQR:这可能是L2平方范数(L-2 squared norm),它计算的是向量元素平方和。
NORM_HAMMING 和 NORM_HAMMING2:可能是某种类型的哈明范数(Hamming norm),它通常用于量化矢量或矩阵中非零元素的数量。
NORM_TYPE_MASK:这可能是一个位掩码,用于选择上述范数类型的一部分。
NORM_RELATIVE:这可能是一个标志,表示使用相对范数(relative norm),即根据向量的大小来计算范数。
NORM_MINMAX:这可能是最小最大范数(min-max norm),它把向量映射到0和1之间。20,blur:均值滤波
CV_EXPORTS_W void blur( InputArray src, OutputArray dst,Size ksize, Point anchor = Point(-1,-1),int borderType = BORDER_DEFAULT );//参数1(src):原图
//参数2(dst):处理后的图像
//参数3(ksize):核的尺寸,正奇数
//参数4(anchor):锚点,默认值 Point(-l-l)表示这个锚点在核的中心
//参数5(borderType):边框类型21,boxFilter:方框滤波
CV_EXPORTS_W void boxFilter( InputArray src, OutputArray dst, int ddepth,Size ksize, Point anchor = Point(-1,-1),bool normalize = true,int borderType = BORDER_DEFAULT );//参数1(src):原图
//参数2(dst):处理后的图像
//参数3(ddepth):处理后图像深度,-1代表使用原图深度
//参数4(ksize):核的尺寸,正奇数
//参数5(anchor):锚点,默认值 Point(-l-l)表示这个锚点在核的中心
//参数6(normalize):归一化处理
//参数7(borderType):边框类型
22,GaussianBlur:高斯滤波
CV_EXPORTS_W void GaussianBlur( InputArray src, OutputArray dst, Size ksize,double sigmaX, double sigmaY = 0,int borderType = BORDER_DEFAULT );//参数1(src):原图
//参数2(dst):处理后图像
//参数3(ksize):内核大小,正奇数
//参数4(sigmaX):X方向上的高斯核标准偏差
//参数5(sigmaY):Y方向上的高斯核标准偏差
//参数6(borderType ):边框类型23,medianBlur:中值滤波
CV_EXPORTS_W void medianBlur( InputArray src, OutputArray dst, int ksize );//参数1(src):原图
//参数2(dst):处理后图像
//参数3(ksize):内核大小,正奇数24,bilateralFilter:双边滤波
CV_EXPORTS_W void bilateralFilter( InputArray src, OutputArray dst, int d,double sigmaColor, double sigmaSpace,int borderType = BORDER_DEFAULT );//参数1(src):原图
//参数2(dst):处理后图像
//参数3(d):表示在过滤过程中每个像素邻域的直径
//参数4(sigmaColor):颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有越宽广的颜色会被混合到一起,产生较大的半相等颜色区域
//参数5(sigmaSpace):坐标空间中滤波器的sigma值,坐标空间的标注方差。它的数值越大,意味着越远的像素会相互影响,从而使更大的区域中足够相似的颜色获取相同的颜色。当 d>0时, d指定了邻域大小且与sigmaSpace无关。否则, d正比于sigmaSpace
//参数6(borderType):边框类型25,dilate:膨胀(形态学滤波)
CV_EXPORTS_W void dilate( InputArray src, OutputArray dst, InputArray kernel,Point anchor = Point(-1,-1), int iterations = 1,int borderType = BORDER_CONSTANT,const Scalar& borderValue = morphologyDefaultBorderValue() );//参数1(src):原图
//参数2(dst):处理后图像
//参数3(kernel):内核,可以是正方向或者矩形,可以通过cv2.getStructuringElement()函数创建
//参数4(anchor ):锚点
//参数5(iterations):迭代次数,如连续膨胀几次
//参数6(borderType ):边框类型
//参数7(borderValue ):边界值26,getStructuringElement:获取内核
CV_EXPORTS_W Mat getStructuringElement(int shape, Size ksize, Point anchor = Point(-1,-1));//参数1(shape):设定卷积核的形状,有三个可选值:MORPH_RECT(返回矩形卷积核)、MORPH_CROSS(返回十字形卷积核)和MORPH_ELLIPSE(返回椭圆形卷积核)
//参数2(ksize):表示卷积核有x行,y列
//参数3(anchor ):设定锚点的位置,一般设为(-1,-1),表示锚点位于核中心。注:参数1(shape)枚举定义
enum MorphShapes {MORPH_RECT = 0, MORPH_CROSS = 1, MORPH_ELLIPSE = 2
};27,erode:腐蚀(形态学滤波)
CV_EXPORTS_W void erode( InputArray src, OutputArray dst, InputArray kernel,Point anchor = Point(-1,-1), int iterations = 1,int borderType = BORDER_CONSTANT,const Scalar& borderValue = morphologyDefaultBorderValue() );//参数1(src):原图
//参数2(dst):处理后图像
//参数3(kernel):内核,可以是正方向或者矩形,可以通过cv2.getStructuringElement()函数创建
//参数4(anchor ):锚点
//参数5(iterations):迭代次数,如连续腐蚀几次
//参数6(borderType ):边框类型
//参数7(borderValue ):边界值28,morphologyEx:形态学滤波
CV_EXPORTS_W void morphologyEx( InputArray src, OutputArray dst,int op, InputArray kernel,Point anchor = Point(-1,-1), int iterations = 1,int borderType = BORDER_CONSTANT,const Scalar& borderValue = morphologyDefaultBorderValue() );//参数1(src):原图
//参数2(dst):处理后图像
//参数3(op):形态学操作的类型,可以是腐蚀、膨胀、开运算、闭运算、顶帽、黑帽等
//参数4(kernel):内核,可以是正方向或者矩形,可以通过cv2.getStructuringElement()函数创建
//参数5(anchor ):锚点
//参数6(iterations):迭代次数
//参数7(borderType ):边框类型
//参数8(borderValue ):边界值
注:参数3(op)枚举定义
enum MorphTypes{MORPH_ERODE = 0, MORPH_DILATE = 1, MORPH_OPEN = 2, MORPH_CLOSE = 3, MORPH_GRADIENT = 4, MORPH_TOPHAT = 5, MORPH_BLACKHAT = 6, MORPH_HITMISS = 7
};/*MORPH_ERODE //腐蚀MORPH_DILATE //膨胀MORPH_OPEN //开运算MORPH_CLOSE //闭运算MORPH_GRADIENT //梯度MORPH_TOPHAT //顶帽MORPH_BLACKHAT //白帽MORPH_HITMISS //Hit-or-Miss 运算,是一种特殊的形态学运算,通常用于检测满足特定形状的物体
*/29,floodFill函数:水漫填充
两个重载
函数1
CV_EXPORTS_W int floodFill( InputOutputArray image, InputOutputArray mask,Point seedPoint, Scalar newVal, CV_OUT Rect* rect=0,Scalar loDiff = Scalar(), Scalar upDiff = Scalar(),int flags = 4 );//参数1(image):原图
//参数2(mask):掩膜
//参数3(seedPoint):漫水填充算法的起始点
//参数4(newVal):像素点被染色的值 即在重绘区域像素的新值
//参数5(rect):有默认值0,用于设函数将要重绘区域的最小边界矩形区域
//参数6(loDiff):有默认值Scalar(),表示当前观察像素值与其部件邻域像素值或者待加入该部件的种子像素之间亮度或颜色之负差(lower brightness/color difference)的最大值
//参数7(upDiff):有默认值Scalar(),表示当前观察像素值与其部件邻域像素值或者待加入该部件的种子像素之间亮度或颜色之正差(lower brightness/color difference)的最大值
//参数8(flags):操作标志符
//低八位 (第0-7位〉用于控制算法的连通性 可取4(4为默认值)或者8。如果设为 4,表示填充算法只考虑当前像素水平方向和垂直方向的相邻点;如果设为8,除上述相邻点外,还会包含对角线方向的相邻点。
//高八位,可通过枚举设置,FLOODFILL_FIXED_RANGE,如果设置为这个标识 ,就会考虑当前像素与种子像素之间的差, 否则就考虑当前像素与其相邻像素的差,这个范围是浮动的。FLOODFILL_MASK_ONLY,如果设置为这个标识 ,函数不会去填充改变原始图像(也就是忽略第 newVal) ,而是去填充掩模图像mask。函数2
CV_EXPORTS int floodFill( InputOutputArray image,Point seedPoint, Scalar newVal, CV_OUT Rect* rect = 0,Scalar loDiff = Scalar(), Scalar upDiff = Scalar(),int flags = 4 );//参数1(iamge):原图
//参数2(seedPoint):漫水填充算法的起始点
//参数3(newVal):像素点被染色的值 即在重绘区域像素的新值
//参数4(rect):有默认值0,用于设函数将要重绘区域的最小边界矩形区域
//参数5(loDiff):有默认值Scalar(),表示当前观察像素值与其部件邻域像素值或者待加入该部件的种子像素之间亮度或颜色之负差(lower brightness/color difference)的最大值
//参数6(upDiff):有默认值Scalar(),表示当前观察像素值与其部件邻域像素值或者待加入该部件的种子像素之间亮度或颜色之正差(lower brightness/color difference)的最大值
//参数7(flags):操作标志符
//低八位 (第0-7位〉用于控制算法的连通性 可取4(4为默认值)或者8。如果设为 4,表示填充算法只考虑当前像素水平方向和垂直方向的相邻点;如果设为8,除上述相邻点外,还会包含对角线方向的相邻点。
//高八位,可通过枚举设置,FLOODFILL_FIXED_RANGE,如果设置为这个标识 ,就会考虑当前像素与种子像素之间的差, 否则就考虑当前像素与其相邻像素的差,这个范围是浮动的。FLOODFILL_MASK_ONLY,如果设置为这个标识 ,函数不会去填充改变原始图像(也就是忽略第 newVal) ,而是去填充掩模图像mask。相关文章:
贰[2],OpenCV函数解析
1,imread:图片读取 CV_EXPORTS_W Mat imread( const String& filename, int flags IMREAD_COLOR );//参数1(filename):文件地址 //参数2(flags):读取标志 注:ImreadModes,参数2(flags)枚举定义 enum ImreadModes { IMREAD…...

探秘Python闭包与作用域
文章目录 闭包的定义与作用LEGB规则nonlocal与global关键字在Python的世界里,理解闭包(Closure)和作用域(Scope)是提升编程技巧和深度的一大步。这篇文章将带你深入了解闭包的神秘面纱,掌握LEGB规则,并使用nonlocal与global关键字来巧妙控制变量作用域。 闭包的定义与作…...

GPT-4V:AI在教育领域的应用
OpenAI于9月25日发布了最新的GPT-4V模型,为ChatGPT引入了语音和图像功能,为用户提供更多元化的使用方式。这次更新将为用户带来更便捷、直观的交互体验,用户可以直接拍照上传并针对照片内容提出问题。OpenAI的最终目标是构建安全、有益的人工…...

自动化之Java面试
1.重写与重载的区别 重载规则: 方法名相同,参数个数或类型不同,与返回值类型无关,节约词汇,例如driver.switchTo().frame(index/nameOrId/frameElement) java的重载(overload) 最重要的应用场景就是构造器…...

Redis中的Zset类型
目录 Zset的相关命令 zadd zrange zcard zcount zrevrange zrangebyscore zpopmax bzpopmax zpopmin和bzpopmin zrank zrevrank zscore zrem zremrangebyrank zremrangebyscore 操作集合间的命令 zinterstore和zunionstore 内部编码 Zset的应用场景 Zset表…...

Python行对齐工具difflib
1 用途 1.1 功能 对比两个字符串数组之间的差异,以第一个参数为基准,与第二个参数比较。 1.2 使用场景 一个原文件,一个改过的文件,对比差异;一个纯文本,一个带格式的,对比差异;…...

Flutter利用GridView创建网格布局实现优美布局
文章目录 简介使用详解导入依赖项创建一个基本的 GridView一些参数说明使用GridView.count来构造 其他控制总结 简介 GridView 是 Flutter 中用于创建网格布局的强大小部件。它允许你在行和列中排列子小部件,非常适合显示大量项目,例如图像、文本、卡片…...

IDEA 基本配置
IDEA 基本配置 1、基本样式2、环境参数3、基本插件4、参考 1、基本样式 设置全局字体大小 配置font 字体大小:15 配置类注释 /** ** Author: ${USER}* Date: ${YEAR}-${MONTH}-${DAY} ${HOUR}:${MINUTE}* Version: 1.0.0 */配置注释keymap 添加 注释 ccm&…...

计算机组成原理平时作业一
计算机组成原理平时作业一 1.单选题 1.1计算机中使用总线结构便于增减外设,同时(c )。 a.减少了信息传输量 b.提高了信息传输量 c.减少了信息传输量的条数 d.三者均正确 答案解析: 概念规定 1.2在定点补码运算器中,…...

iOS Crash 治理:淘宝VisionKitCore 问题修复
本文通过逆向系统,阅读汇编指令,逐步找到源码,定位到了 iOS 16.0.<iOS 16.2 WKWebView 的系统bug 。同时苹果已经在新版本修复了 Bug,对于巨大的存量用户,仍旧会造成日均 Crash pv 1200 uv 1000, 最终通…...

NSSM部署window服务
nssm 下载 安装服务:nssm install <servicename> 启动服务:nssm start <servicename> 停止服务:nssm stop <servicename> 重启服务: nssm restart <servicename> 删除创建的servername服务: nssm remove <service…...

Go语言数据类型
文章目录 Go语言数据类型一、布尔类型二、数字类型三、字符串类型四、派生类型 Go语言数据类型 在 Go 编程语言中,数据类型用于声明函数和变量。 数据类型的出现是为了把数据分成所需内存大小不同的数据,编程的时候需要用大数据的时候才需要申请大内存…...
Python爬取汽车之家二手车数据并作可视化
大家早好、午好、晚好吖 ❤ ~欢迎光临本文章 如果有什么疑惑/资料需要的可以点击文章末尾名片领取源码 课程亮点: 1、系统分析目标网页 2、html标签数据解析方法 3、海量数据一键保存 获取二手车数据 环境介绍: python 3.8 pycharm 2022.3专业版 requests >>>…...

NeRF神经辐射场渲染过程详解,三维重建渲染过程基本原理_光线采样sample_pdf()和光线渲染render_rays ()代码详解
目录 1 神经辐射场 1.1 基本原理 1.2 基本流程 1.3 数学解释 2 三维场景图像渲染详解 2.1射线采样 2.2 NeRF 模型预测 2.3 体积渲染 3 采样与渲染代码详解 (rending.py) 3.1 神经体积渲染代码解析 3.2 sample_pdf 函数 3.3 render_rays 函数 …...
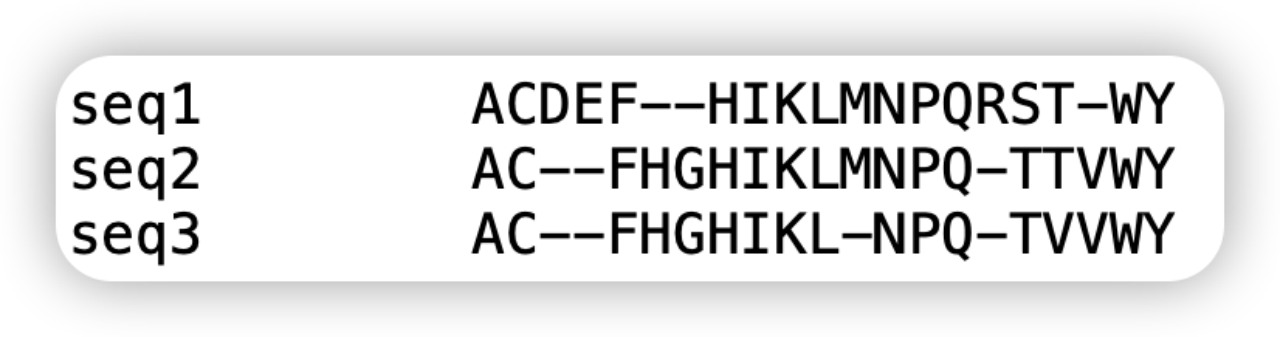
Msa类处理多序列比对数据
同源搜索,多序列比对等都是常用的方式,但是有很多的软件可以实现这些同源搜索和多序列比对,但是不同的软件输出的文件格式却是不完全一致,有熟悉的FASTA格式的,也有A2M, A3M,stockholm等格式。 详细介绍: …...

ChatGPT如何管理对话历史?
问题 由于现在开始大量使用ChatGPT对话功能,认识到他在提供启发方面具有一定价值。比如昨天我问他关于一个微习惯的想法,回答的内容还是很实在,而且能够通过他的表达理解自己的问题涉及到的领域是什么。 此外,ChatGPT能够总结对话…...
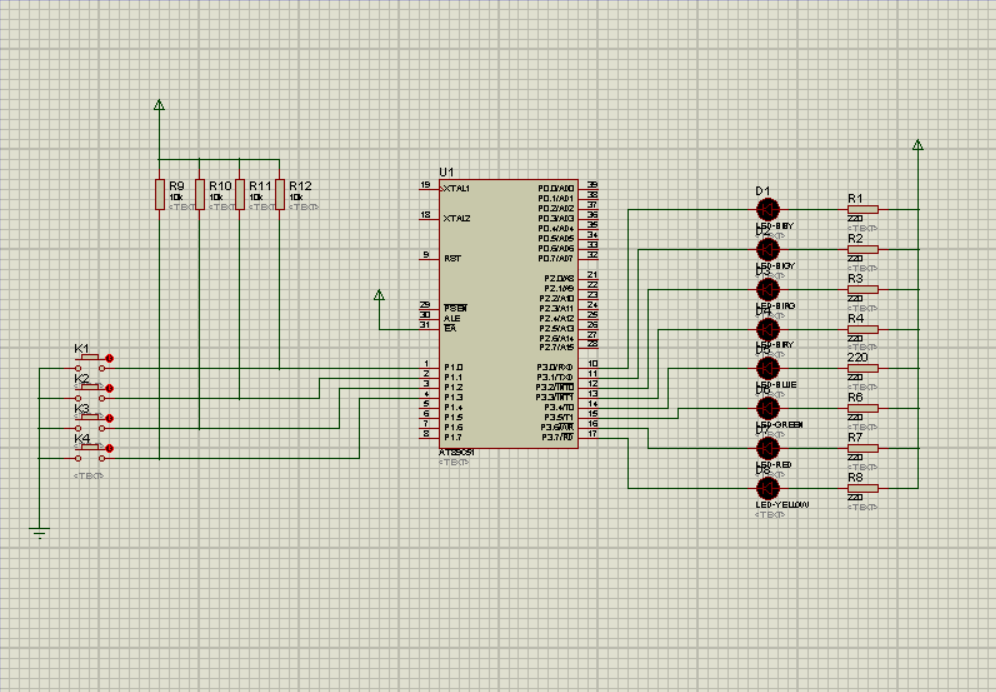
独立键盘接口设计(Keil+Proteus)
前言 软件的操作参考这篇博客。 LED数码管的静态显示与动态显示(KeilProteus)-CSDN博客https://blog.csdn.net/weixin_64066303/article/details/134101256?spm1001.2014.3001.5501实验:用4个独立按键控制8个LED指示灯。 按下k1键&#x…...

阿里云99元服务器2核2G3M带宽_4年396元_新老用户同享
阿里云99元服务器新老用户同享活动 aliyunfuwuqi.com/go/aliyun 首先要在2023年11月1日去阿里云活动页下单新购这个套餐,享受99元包1年。同天再续费1年又享受了99元包1年;等到明年2024年11月1日之后,又可以以99元续1年;最后等到20…...

数据库实验:SQL的数据控制
目录 数据控制实验目的实验内容实验要求实验过程实验内容提纲实验过程 数据控制 数据控制SQL语句(DCL)是一类可对用户数据访问权进行控制的操作语句,可以控制特定用户或角色对数据表、视图、存储过程、触发器等数据对象的访问权限。主要有GRANT、REVOKE、DENY语句操…...
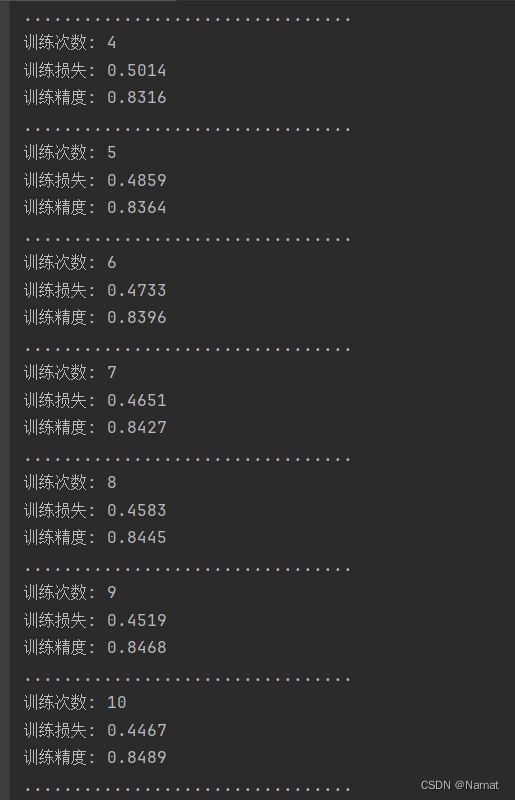
深度学习_10_softmax_实战
由于网上代码的画图功能是基于jupyter记事本,而我用的是pycham,这导致画图代码不兼容pycharm,所以删去部分代码,以便能更好的在pycharm上运行 完整代码: import torch from d2l import torch as d2l"创建训练集&创建检测集合"…...

土地利用变化分析实战:用Python处理40年CNLUCC数据集
土地利用变化分析实战:用Python处理40年CNLUCC数据集 1972年至今的中国土地利用变化数据,如同一部记录国土变迁的"生态相册"。对于区域规划师、生态研究者而言,这套CNLUCC数据集的价值不亚于考古学家手中的碳14检测仪。本文将带您用…...
)
CASS11.0再升级:新增实用功能与BUG修复全解析(2022.5.11版)
1. CASS11.0版本升级概览 作为测绘行业的老牌软件,CASS11.0这次更新又带来了不少惊喜。记得去年11月刚发布时,我就第一时间安装体验过,当时就被它的3D建模能力和土方计算优化惊艳到了。没想到短短半年时间,研发团队又连续推出了三…...

Win10下MobSF安装避坑指南:从Python版本冲突到环境变量配置全解析
Win10下MobSF安装避坑指南:从Python版本冲突到环境变量配置全解析 移动应用安全测试已成为开发流程中不可或缺的一环。作为一款强大的开源工具,MobSF(Mobile Security Framework)因其全面的自动化分析能力备受开发者青睐。然而在…...

nli-distilroberta-base实际项目:新闻摘要与原文蕴含关系自动评估
nli-distilroberta-base实际项目:新闻摘要与原文蕴含关系自动评估 1. 项目概述 在新闻媒体和内容创作领域,如何快速评估一篇摘要是否准确反映了原文内容一直是个挑战。传统的人工审核方式效率低下且成本高昂。nli-distilroberta-base项目正是为解决这一…...

中小企业如何选择适合自己的SEO软件
了解SEO软件的基本概念 在当今数字化营销时代,中小企业如何选择适合自己的SEO软件是一个至关重要的问题。SEO(搜索引擎优化)软件的核心功能是帮助企业提升在搜索引擎上的排名,从而增加网站的曝光率和流量。但是,市面上…...

别再死记硬背MVC了!通过Unity连连看实战,我搞懂了数据与UI分离的5个真实好处
从连连看实战看数据与UI分离的五大工程化收益 在游戏开发领域,设计模式常常被视为"高级概念"而被初学者敬而远之。但当我真正在Unity中实现一个简单的连连看游戏时,才深刻体会到MVC模式中数据与UI分离带来的实际价值。这不是教科书上的理论说教…...

电源管理入门-12 clock驱动
电源管理的两个大方面就是电压和时钟。 Clock 时钟就是 SoC 中的脉搏,由它来控制各个部件按各自的节奏跳动。比如,CPU主频设置,串口的波特率设置,I2S的采样率设置,I2C的速率设置等等。这些不同的clock设置,…...

向量化计算落地难?揭秘阿里/腾讯内部正在用的7个Java Vector API高危避坑场景
第一章:Java Vector API向量化计算落地的现实困境Java Vector API(JEP 338、414、426、448)虽在JDK 16起逐步成熟,但实际工程化部署仍面临多重结构性约束。其核心矛盾在于:API设计高度抽象,而底层硬件适配、…...
)
别再手动标图了!用CVAT和YOLOv5搭建半自动标注流水线(保姆级避坑指南)
从零构建CVATYOLOv5半自动标注系统:工程化实践与效率革命 标注数据是AI开发中最耗时却无法绕过的环节。我曾为一个客户项目标注3万张工业零件图像,团队3人整整耗费两周——直到发现CVAT与训练好的YOLOv5模型结合,能将效率提升400%。本文将分…...

算法部署设计,Sm3国密算法的硬件ip设计,纯v手写代码,图一为ip接口,图二为资源消耗
算法部署设计,Sm3国密算法的硬件ip设计,纯v手写代码,图一为ip接口,图二为资源消耗,图三四为封装为axilite接口并在开发版下板测试,图五为开发版实测结果 直接联系内容包括:sm3的软件python实现代码…...