基于飞迪RTK/INS组合导航模组的里程计发布方法
文章目录
- 概要
- 解算过程
- 获取初始化点
- 经纬度坐标系转UTM
- 计算航向角
- 发布odom坐标
- 完整代码
概要
这篇博客主要介绍,如何将GPS_fix、磁偏角转成odom信息。
PS:官方的驱动包中是自带odom信息,但是对于原点的定义尚未找到出处,故自己另外写了一套发布odom信息。
解算过程
获取初始化点
第一个获取的GPS_fix点为初始点
initPose.latitude = gpsFix->latitude;
initPose.longitude = gpsFix->longitude;
initPose.altitude = 0;
init = true;
经纬度坐标系转UTM
/*原点经纬度转UTM*/
geographic_msgs::GeoPoint gpInit;
gpInit.latitude = initPose.latitude;
gpInit.longitude = initPose.longitude;
geodesy::UTMPoint ptInit(gpInit);
initX = ptInit.easting;
initY = ptInit.northing;
计算航向角
记得减去当地的磁偏角,在这个网站进行查询。
tf::Quaternion qua;
tf::quaternionMsgToTF(odomMsg->pose.pose.orientation, qua);
double roll, pitch, yaw;//定义存储roll,pitch and yaw的容器
tf::Matrix3x3(qua).getRPY(roll, pitch, yaw); //进行转换
yaw = yaw - 0.5 * M_PI + MagDec / 180.0 * M_PI;
发布odom坐标
/***publish gps_odom**/
nav_msgs::Odometry odom;
odom.header.stamp = ros::Time::now();
odom.header.frame_id = "odom";
odom.pose.pose.position.x = fixX - initX;
odom.pose.pose.position.y = fixY - initY;
odom.pose.pose.orientation.x=qua.x();
odom.pose.pose.orientation.y=qua.y();
odom.pose.pose.orientation.z=qua.z();
odom.pose.pose.orientation.w=qua.w();
gpsOdomPub.publish(odom);
完整代码
#include <ros/ros.h>
#include "turtlesim/Pose.h"
#include <sensor_msgs/NavSatFix.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/PolygonStamped.h>
#include <geometry_msgs/QuaternionStamped.h>
#include <geographic_msgs/GeoPoseStamped.h>
#include <geodesy/utm.h>
#include <nav_msgs/Odometry.h>
#include <nav_msgs/Path.h>
#include <math.h>
#include <message_filters/synchronizer.h>
#include <message_filters/subscriber.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/time_synchronizer.h>
#include <boost/thread/thread.hpp>
#include <iostream>//全局变量
static double EARTH_RADIUS = 6378.137;//地球半径class OdomPublisher
{public:OdomPublisher();void gpsCallback(const sensor_msgs::NavSatFixConstPtr& gpsFix,const nav_msgs::Odometry::ConstPtr& odomMsg);double rad(double d);private:ros::Publisher state_pub_, smallCarPub, gpsOdomPub;geometry_msgs::PolygonStamped carPolygon;nav_msgs::Path ros_path_;ros::NodeHandle n, nhPrivate;message_filters::Subscriber<sensor_msgs::NavSatFix> *subGPS;message_filters::Subscriber<nav_msgs::Odometry> *subOdom;typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::NavSatFix, nav_msgs::Odometry> syncPolicy;message_filters::Synchronizer<syncPolicy> *sync;bool init;struct my_pose{double latitude;double longitude;double altitude;};my_pose initPose, fixPose;double initX, initY, MagDec;std::string gpsFixTopic, gpsOdomTopic, gpsOdomPubTopic;
};OdomPublisher::OdomPublisher():nhPrivate("~")
{ ROS_INFO("Initialization");nhPrivate.param("gpsFixTopic", gpsFixTopic, std::string("/gps/fix"));nhPrivate.param("gpsOdomTopic", gpsOdomTopic, std::string("/odom"));nhPrivate.param("gpsOdomPubTopic", gpsOdomPubTopic, std::string("/gps_fix/odom"));nhPrivate.getParam("MagDec", MagDec);subGPS = new message_filters::Subscriber<sensor_msgs::NavSatFix> (n, gpsFixTopic.c_str(), 1);subOdom = new message_filters::Subscriber<nav_msgs::Odometry> (n, gpsOdomTopic.c_str(), 1);sync = new message_filters::Synchronizer<syncPolicy> (syncPolicy(10), *subGPS, *subOdom);sync->registerCallback(boost::bind(&OdomPublisher::gpsCallback, this, _1, _2));state_pub_ = n.advertise<nav_msgs::Path>("/trajectory/gps", 10);smallCarPub = n.advertise<geometry_msgs::PolygonStamped>("/trajectory/car", 10);gpsOdomPub = n.advertise<nav_msgs::Odometry>(gpsOdomPubTopic.c_str(),10); init = false;
}//角度制转弧度制
double OdomPublisher::rad(double d)
{return d * 3.1415926 / 180.0;
}void OdomPublisher::gpsCallback(const sensor_msgs::NavSatFixConstPtr& gpsFix,const nav_msgs::Odometry::ConstPtr& odomMsg)
{// ROS_INFO_STREAM("Starting to work!!!");// std::cout << "Starting to work!!!" << std::endl;//初始化if(!init){initPose.latitude = gpsFix->latitude;initPose.longitude = gpsFix->longitude;initPose.altitude = 0;init = true;/*原点经纬度转UTM*/geographic_msgs::GeoPoint gpInit;gpInit.latitude = initPose.latitude;gpInit.longitude = initPose.longitude;geodesy::UTMPoint ptInit(gpInit);initX = ptInit.easting;initY = ptInit.northing;}else{geographic_msgs::GeoPoint gp;gp.latitude = gpsFix->latitude;gp.longitude = gpsFix->longitude;geodesy::UTMPoint pt(gp);double fixX = pt.easting;double fixY = pt.northing;tf::Quaternion qua;tf::quaternionMsgToTF(odomMsg->pose.pose.orientation, qua);double roll, pitch, yaw;//定义存储roll,pitch and yaw的容器tf::Matrix3x3(qua).getRPY(roll, pitch, yaw); //进行转换yaw = yaw - 0.5 * M_PI + MagDec / 180.0 * M_PI;qua.setRPY(0,0,yaw);// ROS_INFO("After optmized, yaw is %f", yaw);/***publish gps_odom**/nav_msgs::Odometry odom;odom.header.stamp = ros::Time::now();odom.header.frame_id = "odom";odom.pose.pose.position.x = fixX - initX;odom.pose.pose.position.y = fixY - initY;odom.pose.pose.orientation.x=qua.x();odom.pose.pose.orientation.y=qua.y();odom.pose.pose.orientation.z=qua.z();odom.pose.pose.orientation.w=qua.w(); gpsOdomPub.publish(odom);ros_path_.header.frame_id = "odom";ros_path_.header.stamp = ros::Time::now(); geometry_msgs::PoseStamped pose;pose.header = ros_path_.header;pose.pose.position = odom.pose.pose.position;ros_path_.poses.push_back(pose);state_pub_.publish(ros_path_);}
}int main(int argc,char **argv)
{ros::init(argc,argv,"gps_fix");OdomPublisher op;ros::spin();return 0;
}相关文章:

基于飞迪RTK/INS组合导航模组的里程计发布方法
文章目录 概要解算过程获取初始化点经纬度坐标系转UTM计算航向角发布odom坐标 完整代码 概要 这篇博客主要介绍,如何将GPS_fix、磁偏角转成odom信息。 PS:官方的驱动包中是自带odom信息,但是对于原点的定义尚未找到出处,故自己另外写了一套发…...

无mac电脑获取app的公钥的方法
在腾讯云或阿里云进行ios的app备案的时候,它要求输入app的公钥 但是他们并没有提供mac电脑的获取工具,需要我们使用mac电脑去获取app的公钥 假如我们没有mac电脑怎么办呢? 网上很多教程是通过java代码去获取的,太麻烦了&#x…...

【Mybatis源码】反射 – TypeParameterResolver
反射在Java编程开发中具有很重要的地位,能够使用反射机制创建实例、获取或设置字段的值、调用方法等,但如果字段、方法中出现泛型类型时,我们在使用反射进行解析时,往往不能解析到实际的类型,只能解析到泛型参数。 在Mybatis中使用TypeParameterResovler类提供了对Type的封…...

Drogon源码剖析
一、Drogon介绍 Drogon是一个基于C的跨平台HTTP应用程序框架,它支持Linux,也支持macOS、FreeBSD,OpenBSD,HaikuOS,和Windows。项目地址:https://github.com/drogonframework/drogon。 它的主要特点如下&a…...
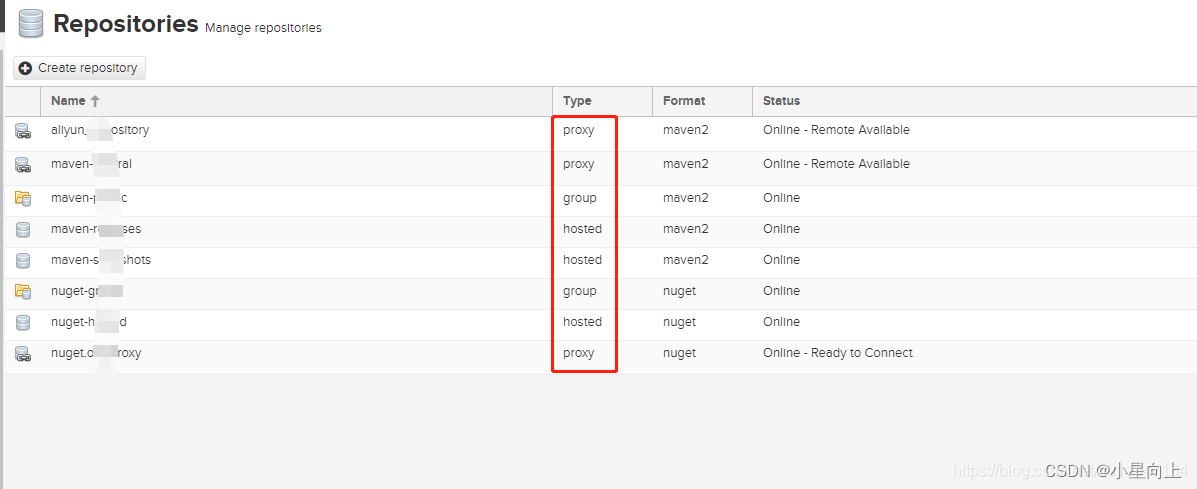
maven 上传本地jar包到nexus
maven上传命令 mvn deploy:deploy-file -DgroupIdcom.microsoft.sqlserver -DartifactIdsqljdbc4 -Dversion4.0 -Dpackagingjar -DfileC:\java\top-sdk-java-1.0.1-lib\lib\bcprov-jdk16-1.46.jar -Durlhttp://ip:port/repository/maven-releases/ -DrepositoryIdsnapshot…...

聊一聊,今年参加软考高级的一些总结
先上结论,系统架构设计师考题难度不高,总之多读书,多刷题,多写博客,多总结,有一定工作经验的基本上都非常容易过。但是我估计自己考不过,主要是论文这块没写好,思路不清晰࿰…...
】图像处理硬件加速,基于CNCVE)
【寒武纪(4)】图像处理硬件加速,基于CNCVE
基本概念 1、handle 句柄标识不同任务 2、对于调用上,支持阻塞和非阻塞。使用bInstant标识。 3、查询query可以确认调用是否完成 4、及时刷新cache。CNCVE 硬件的唯一数据来源是DDR,防止CPU访问导致cache内存干扰,需要调用cnsysMacheOperate…...

有关python库
官方库 #1、导入某模块 import os #2、导入OS模块中的system方法 from os import system #3、导入某模块中的孙子模块中的xx方法,并重命名 from module.xx.xx import xx as rename #4、导入OS中的所有模块 #不用进行OS.method(),直接method(࿰…...

java项目之电影网站(ssm框架)
项目简介 电影网站实现了以下功能: 登录模块用例中用户包括用户和管理员和二种角色,分别可以进行其对应的身份登录或取消登录,关闭系统。用户模块主要包括首页,电影信息,电影商城,社区交流,电…...

技术分享 | app自动化测试(Android)--触屏操作自动化
导入TouchAction Python 版本 from appium.webdriver.common.touch_action import TouchAction Java 版本 import io.appium.java_client.TouchAction; 常用的手势操作 press 按下 TouchAction 提供的常用的手势操作有如下操作: press 按下 release 释放 …...
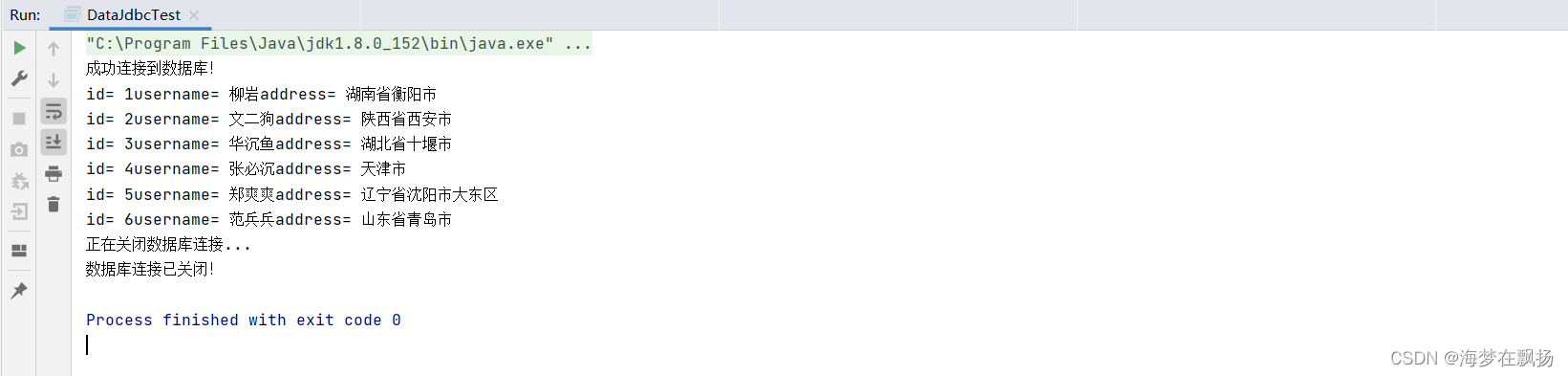
Java连接数据库并查询表中的全部数据
1、导入相关jar包 这里创建简单的maven项目,我们导入相关的jar包 相关依赖: <dependency><groupId>mysql</groupId><artifactId>mysql-connector-java</artifactId><version>5.1.47</version></dependenc…...
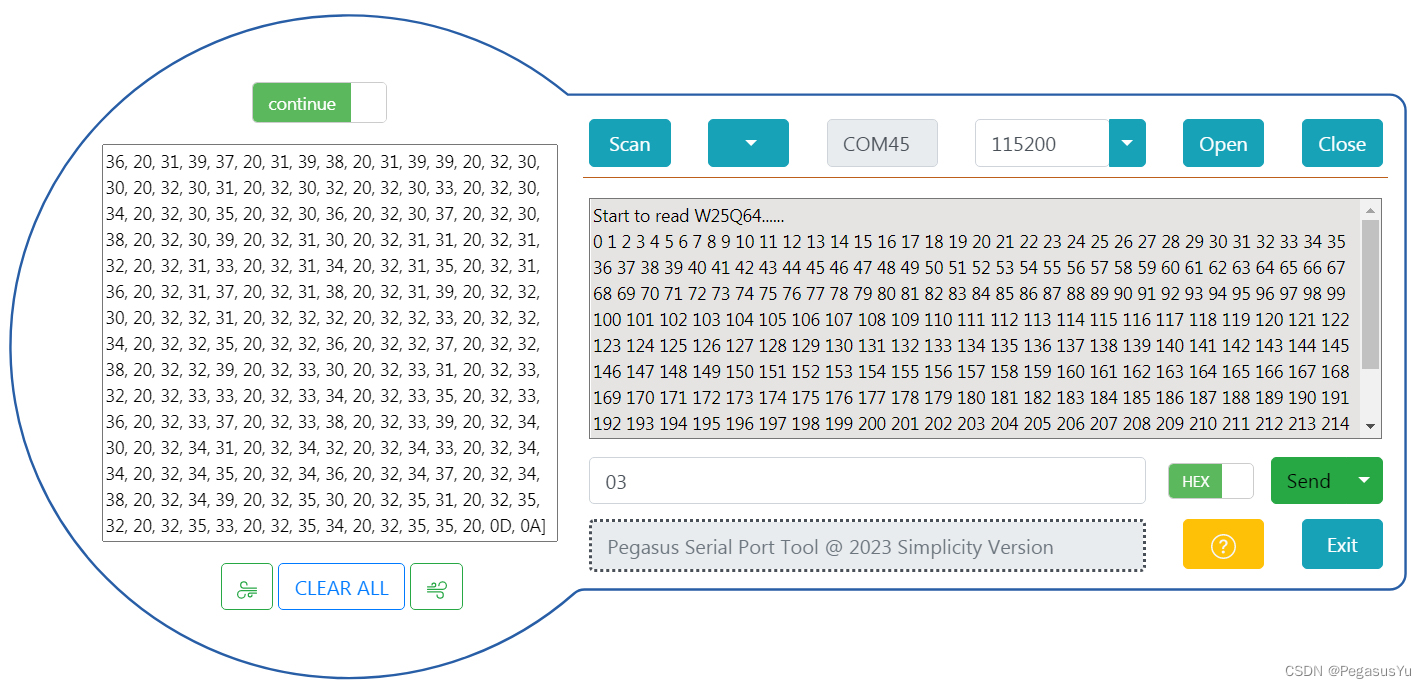
STM32存储左右互搏 SPI总线读写FLASH W25QXX
STM32存储左右互搏 SPI总线读写FLASH W25QXX FLASH是常用的一种非易失存储单元,W25QXX系列Flash有不同容量的型号,如W25Q64的容量为64Mbit,也就是8MByte。这里介绍STM32CUBEIDE开发平台HAL库操作W25Q各型号FLASH的例程。 W25QXX介绍 W25QX…...

【EI会议征稿】第四届计算机网络安全与软件工程国际学术会议(CNSSE 2024)
第四届计算机网络安全与软件工程国际学术会议(CNSSE 2024) 2024 4th International Conference on Computer Network Security and Software Engineering 第四届计算机网络安全与软件工程国际学术会议(CNSSE 2024)将于2024年2月…...

解决pip 安装 pyhash错误
1 pip 安装 pyhash错误 Collecting pyhash (from Calvin0.0.1) Using cached https://pypi.tuna.tsinghua.edu.cn/packages/f0/bf/4db9bed05d10824a17697f65063de19892ca2171a31a9c6854f9bbf55c02/pyhash-0.9.3.tar.gz (602 kB) Preparing metadata (setup.py) … error error:…...
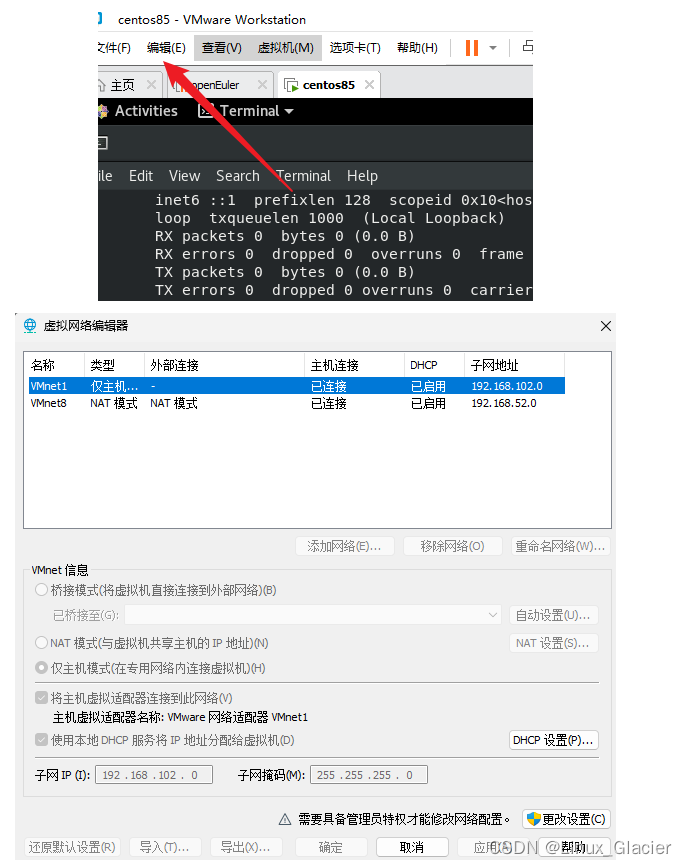
解决 win11 vmware 中centos 网络不能访问外网
解决 win11 vmware 中centos 网络不能访问外网 1、进入win11 高级设置,找到centos 虚拟机使用的网卡 2、看网卡的其他属性 3、按照红圈部分,配置成一样的就行 4、进入到虚拟机配置中,配置成如图一样的NAT模式 5、再进入编辑 -》虚拟网络编辑…...

Flutter vs 前端 杂谈:SliverAppBar、手动实现Appbar、前端Html+JS怎么实现滚动变化型Appbar - 比较
Flutter vs 前端 杂谈 SliverAppBar的弹性背景的显隐效果使用HtmlJS怎么实现 作者:李俊才 (jcLee95):https://blog.csdn.net/qq_28550263 邮箱 :291148484163.com 本文地址:https://blog.csdn.net/qq_28550…...
Qt 二维码生成与识别
1.简介 QZXing是一个基于Qt框架的二维码解码库,它是对ZXing(Zebra Crossing)开源项目的一个Qt封装。ZXing是一个功能强大的开源二维码解码库,支持多种类型的码,包括QR码、DataMatrix码、Aztec码等。 QZXing提供了一个…...
jacoco和sonar
目录 jacoco 引入依赖 构建配置修改 单元测试 生成报告 查看报告 报告说明 1. Instructions 2. Branches 3. Cyclomatic Complexity 4. Lines 5. Methods 6. Classes sonar7.7 基础环境 需要下载软件 解压文件并配置 运行启动 jacoco 引入依赖 <dep…...

Django系列之Serializer的source参数使用、自定义序列化方法
数据准备 models.py from django.contrib.auth.models import AbstractUser from django.db import modelsclass Publish(models.Model):name models.CharField(max_length32)city models.CharField(max_length8)email models.CharField(max_length32)def __str__(self):r…...

Java从入门到精通
Java从入门到精通 1. Java概述1.1 Java是什么1.2 为什么用Java1.3 Java能做什么1.4 Java技术体系平台2. Java快速入门2.1 Java开发环境的准备:JDK简介、安装、常用命令如何使用JavaJDK产品的发展史获取JDK如何验证能用javac和java其他常用命令行命令2.2 Java入门程序-HelloWor…...

设备管理系统是什么?如何建立设备管理体系?
在现代企业的运转中,生产设备无疑是核心资产。无论是制造业的数控机床,还是建筑工地的重型机械,甚至是医疗机构的精密仪器,设备的稳定运行直接决定了企业的生产效率、产品质量和成本控制。然而,许多企业在设备管理上仍…...
)
别再死记硬背了!用C++/Java手把手实现线索二叉树(附完整代码与避坑指南)
从零实现线索二叉树:C/Java双语言实战与陷阱全解析 第一次在面试白板上遇到线索二叉树的实现题时,我的手心全是汗。教科书上的递归图示看起来清晰,但真正要写出无bug的线索化代码时,那些ltag和rtag就像捉迷藏的孩子,总…...

BI 项目交付 SOP
...

Cursor Pro完整解锁方案:一站式解决AI编程助手使用限制的终极指南
Cursor Pro完整解锁方案:一站式解决AI编程助手使用限制的终极指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reach…...
Pixel Dream Workshop 快速上手:Python 零基础入门到生成第一幅AI画作
Pixel Dream Workshop 快速上手:Python 零基础入门到生成第一幅AI画作 1. 前言:为什么选择Pixel Dream Workshop 如果你对AI绘画感兴趣但苦于没有编程基础,这篇教程就是为你量身定制的。Pixel Dream Workshop是一个对新手极其友好的AI绘画工…...

投资分析太复杂?用TradingAgents-CN实现零代码智能分析的3个方案
投资分析太复杂?用TradingAgents-CN实现零代码智能分析的3个方案 【免费下载链接】TradingAgents-CN 基于多智能体LLM的中文金融交易框架 - TradingAgents中文增强版 项目地址: https://gitcode.com/GitHub_Trending/tr/TradingAgents-CN TradingAgents-CN作…...

FRCRN处理长音频文件实战:切片、批处理与结果合并
FRCRN处理长音频文件实战:切片、批处理与结果合并 你是不是遇到过这样的问题?手头有一段长达数小时的会议录音、访谈素材或者播客音频,背景噪音让人头疼,想用FRCRN这样的降噪模型处理一下,结果发现模型一次只能处理几…...

面试题-Mysql篇
什么是存储过程存储过程是一组SQL语句的集合,它们在数据库中预先编译并存储。它们用于封装一组操作,提高性能、减少网络流量,并提供可重用的代码逻辑。存储过程还可以实现数据安全性和数据完整性。mysql如何查询最后一条数据使用ORDER BY根据…...
)
Doris集群部署避坑指南:3FE+3BE配置全流程(含Java环境配置与常见问题解决)
Doris集群部署实战:3FE3BE高可用架构搭建与深度调优 在企业级数据分析场景中,Doris凭借其出色的实时分析性能和高并发处理能力,已成为众多企业的首选OLAP引擎。本文将基于3FE(Frontend)3BE(Backend…...

突破内容采集瓶颈:XHS-Downloader的5大行业解决方案与效率提升指南
突破内容采集瓶颈:XHS-Downloader的5大行业解决方案与效率提升指南 【免费下载链接】XHS-Downloader 小红书(XiaoHongShu、RedNote)链接提取/作品采集工具:提取账号发布、收藏、点赞、专辑作品链接;提取搜索结果作品、…...