vscode + cmake + opencv example
nice try on macos
CMakeLists.txt
cmake_minimum_required(VERSION 3.20)
#添加OPENCV库
#指定OpenCV版本,代码如下
#find_package(OpenCV 3.3 REQUIRED)
#如果不需要指定OpenCV版本,代码如下
find_package(OpenCV REQUIRED)#添加OpenCV头文件
include_directories(${OpenCV_INCLUDE_DIRS})#显示OpenCV_INCLUDE_DIRS的值
message(${OpenCV_INCLUDE_DIRS})# 添加一个可执行程序
# 语法:add_executable( 程序名 源代码文件 )
add_executable( main main.cpp )# 将库文件链接到可执行程序上
target_link_libraries( main ${OpenCV_LIBS})
file(GLOB allCopyFiles "./*.jpg")
file(COPY ${allCopyFiles} DESTINATION .) #copy any .jpg file to <build> dir# 或者
# file(GLOB allCopyFiles "${NSF_HOME}/lib/*")
# execute_process(COMMAND cp ${allCopyFiles} ${LIB})
main.cpp
#include <iostream>#include "opencv2/imgproc.hpp"#include "opencv2/ximgproc.hpp"#include "opencv2/imgcodecs.hpp"#include "opencv2/highgui.hpp"using namespace std;using namespace cv;using namespace cv::ximgproc;int main(int argc, char **argv){string in;// 修改图片CommandLineParser parser(argc, argv, "{@input|me.jpg|input image}{help h||show help message}");if (parser.has("help")){parser.printMessage();return 0;}in = samples::findFile(parser.get<string>("@input"));Mat image = imread(in, IMREAD_GRAYSCALE);if (image.empty()){return -1;}// Create FLD detector// Param Default value Description// length_threshold 10 - Segments shorter than this will be discarded// distance_threshold 1.41421356 - A point placed from a hypothesis line// segment farther than this will be// regarded as an outlier// canny_th1 50 - First threshold for// hysteresis procedure in Canny()// canny_th2 50 - Second threshold for// hysteresis procedure in Canny()// canny_aperture_size 3 - Aperturesize for the sobel operator in Canny().// If zero, Canny() is not applied and the input// image is taken as an edge image.// do_merge false - If true, incremental merging of segments// will be performedint length_threshold = 10;float distance_threshold = 1.41421356f;double canny_th1 = 50.0;double canny_th2 = 50.0;int canny_aperture_size = 3;bool do_merge = false;Ptr<FastLineDetector> fld = createFastLineDetector(length_threshold,distance_threshold, canny_th1, canny_th2, canny_aperture_size,do_merge);vector<Vec4f> lines;// Because of some CPU's power strategy, it seems that the first running of// an algorithm takes much longer. So here we run the algorithm 10 times// to see the algorithm's processing time with sufficiently warmed-up// CPU performance.for (int run_count = 0; run_count < 5; run_count++){double freq = getTickFrequency();lines.clear();int64 start = getTickCount();// Detect the lines with FLDfld->detect(image, lines);double duration_ms = double(getTickCount() - start) * 1000 / freq;cout << "Elapsed time for FLD " << duration_ms << " ms." << endl;}// Show found lines with FLDMat line_image_fld(image);fld->drawSegments(line_image_fld, lines);imshow("FLD result", line_image_fld);waitKey(1);Ptr<EdgeDrawing> ed = createEdgeDrawing();ed->params.EdgeDetectionOperator = EdgeDrawing::SOBEL;ed->params.GradientThresholdValue = 38;ed->params.AnchorThresholdValue = 8;vector<Vec6d> ellipses;for (int run_count = 0; run_count < 5; run_count++){double freq = getTickFrequency();lines.clear();int64 start = getTickCount();// Detect edges// you should call this before detectLines() and detectEllipses()ed->detectEdges(image);// Detect linesed->detectLines(lines);double duration_ms = double(getTickCount() - start) * 1000 / freq;cout << "Elapsed time for EdgeDrawing detectLines " << duration_ms << " ms." << endl;start = getTickCount();// Detect circles and ellipsesed->detectEllipses(ellipses);duration_ms = double(getTickCount() - start) * 1000 / freq;cout << "Elapsed time for EdgeDrawing detectEllipses " << duration_ms << " ms." << endl;}Mat edge_image_ed = Mat::zeros(image.size(), CV_8UC3);vector<vector<Point>> segments = ed->getSegments();for (size_t i = 0; i < segments.size(); i++){const Point *pts = &segments[i][0];int n = (int)segments[i].size();polylines(edge_image_ed, &pts, &n, 1, false, Scalar((rand() & 255), (rand() & 255), (rand() & 255)), 1);}imshow("EdgeDrawing detected edges", edge_image_ed);Mat line_image_ed(image);fld->drawSegments(line_image_ed, lines);// Draw circles and ellipsesfor (size_t i = 0; i < ellipses.size(); i++){Point center((int)ellipses[i][0], (int)ellipses[i][1]);Size axes((int)ellipses[i][2] + (int)ellipses[i][3], (int)ellipses[i][2] + (int)ellipses[i][4]);double angle(ellipses[i][5]);Scalar color = ellipses[i][2] == 0 ? Scalar(255, 255, 0) : Scalar(0, 255, 0);ellipse(line_image_ed, center, axes, angle, 0, 360, color, 2, LINE_AA);}imshow("EdgeDrawing result", line_image_ed);waitKey();return 0;}
提供一张名叫me.jpg的文件到build文件夹下
REF LINKS:
- https://docs.opencv.org/3.4/d1/d9e/fld_lines_8cpp-example.html
- https://www.cnblogs.com/JoyPoint/p/11629521.html
相关文章:

vscode + cmake + opencv example
nice try on macos CMakeLists.txt cmake_minimum_required(VERSION 3.20) #添加OPENCV库 #指定OpenCV版本,代码如下 #find_package(OpenCV 3.3 REQUIRED) #如果不需要指定OpenCV版本,代码如下 find_package(OpenCV REQUIRED)#添加OpenCV头文件 includ…...

day57【动态规划】647.回文子串 516.最长回文子序列
文章目录 647. 回文子串516.最长回文子序列 647. 回文子串 力扣题目链接 代码随想录讲解 题意:给你一个字符串 s ,请你统计并返回这个字符串中 回文子串 的数目。 回文字符串 是正着读和倒过来读一样的字符串。 子字符串 是字符串中的由连续字符组成的…...
分享vmware和Oracle VM VirtualBox虚拟机的区别,简述哪一个更适合我?
VMware和Oracle VM VirtualBox虚拟机的区别主要体现在以下几个方面: 首先两种软件的安装使用教程如下: 1:VMware ESXI 安装使用教程 2:Oracle VM VirtualBox安装使用教程 商业模式:VMware是一家商业公司,而…...

YOLOV5模型运行
1安装包 如果已经有了torch-cuda环境直接在环境下 pip install -r requirements.txt 2解决报错代码 raise ImportError("Failed to initialize: {0}".format(exc)) from exc ImportError: Failed to initialize: Bad git executable. The git executable must be …...

@Autowired和@Resource注解的区别和联系
直接看原文 原文链接: 【精选】Autowired和Resource注解的区别和联系【精选】 ------------------------------------------------------------------------------------------------------------------------------- 先说联系 联系 Autowired和Resource注解都是作为bean…...

设计模式类型
创建型模式 创建型模式(Creational Pattern)对类的实例化过程进行了抽象,能够将软件模块中对象的创建和对象的使用分离。为了使软件的结构更加清晰,外界对于这些对象只需要知道它们共同的接口,而不清楚其具体的实现细节,使整个系…...

Android修行手册-实现利用POI将图片插入到Excel中(文末送书)
点击跳转>Unity3D特效百例点击跳转>案例项目实战源码点击跳转>游戏脚本-辅助自动化点击跳转>Android控件全解手册点击跳转>Scratch编程案例点击跳转>软考全系列 👉关于作者 专注于Android/Unity和各种游戏开发技巧,以及各种资源分享&…...

低功耗工业RFID设备应用
随着工业自动化的迅速发展,RFID技术也在工业领域得到了广泛的应用,在近距离非接触读写应用时,常常利用低功耗的工业RFID设备来进行识别,下面我们将详细介绍低功耗工业RFID设备的应用。 低功耗工业RFID设备具有功耗低、体积小、重量…...

# Oracle 库常见问题排查
Oracle 库常见问题排查 文章目录 Oracle 库常见问题排查查询数据库的相关信息查看正在执行的语句杀掉正在执行的sql查看未提交的事务查看锁表 查询数据库的相关信息 查看正在执行的语句 SELECT s.sid, s.serial#, s.username, s.status, s.sql_id, s.sql_child_number, sq.sq…...
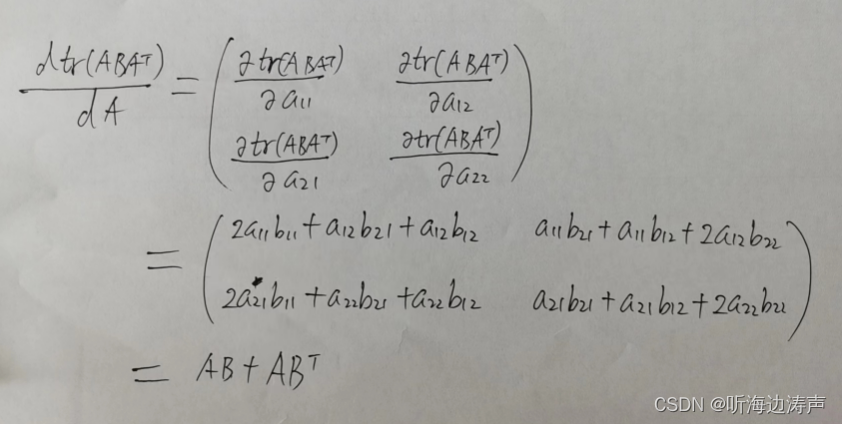
矩阵乘积的迹对矩阵求导
说明 有时候为了输入方便,B和都代表B的转置。 矩阵的在线计算有个网站可以参考:Matrix Calculus dtr(AB)/dAB 下面用一个例子来证明。 dtr(ABA)/dAABAB 下面用一个例子来证明: 因为我们要求ABA的迹,所以为了简便,我们…...

IP 地址冲突检测工具
IP 冲突是一个术语,用于表示同一网络或子网中尝试使用相同 IP 地址的两个或多个设备的状态,这可能会导致发往特定主机的通信与其他主机混淆,因为两者都使用相同的 IP,为了避免这种情况,某些主机在发生 IP 冲突时会失去…...
js树形数组遍历练习,扁平化、格式化、获取节点父级
1.树形数组扁平化 数组扁平化的方式很多,这里主要是用递归处理,除此之外还有正则、扩展运算符等等 const list [{name:1,id:1,children:[{name:11,id:11,children:[{name:111,id:111}]},{name:12},]},{name:2,id:2,children:[{name:21,id:21,children:…...
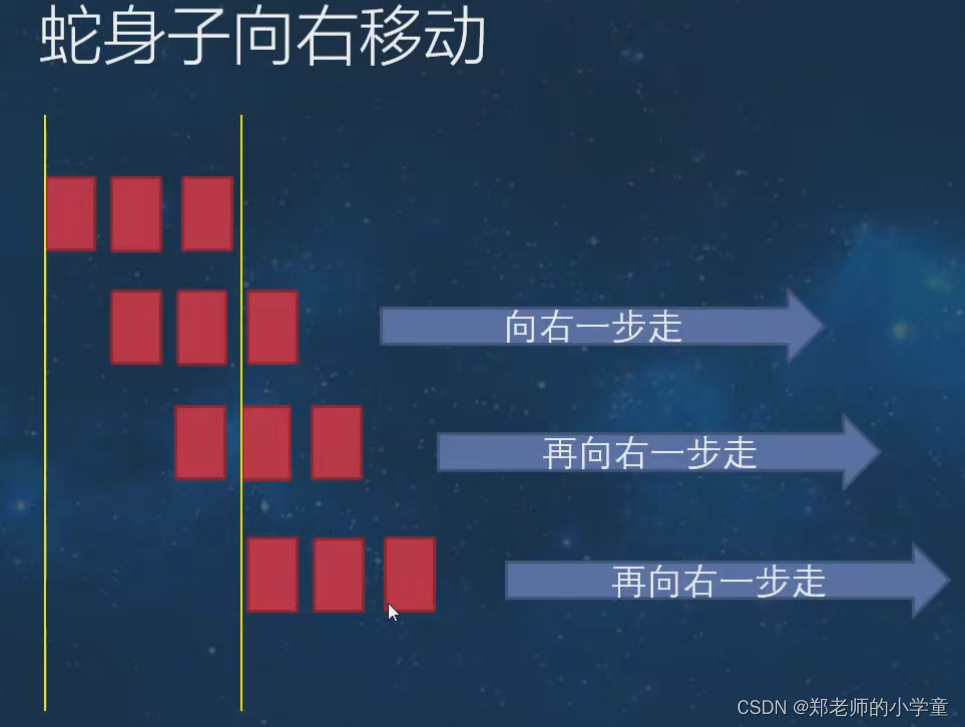
c语言贪吃蛇项目的实现
ncurse的引入 ncurse的概念 ncurse(new curses)是一套编程库,它提供了一系列的函数,以便使用者调用它们去生成基于文本的用户界面。 ncurses是一个能提供功能键定义(快捷键),屏幕绘制以及基于文本终端的图形互动功能的动态库。ncurses用得最多的地方是…...
IDEA运行前端vue项目,安装nodejs,以及配置
我在刚接手到一个项目的时候,不知道前端的代码的情况下,想要写后端代码,遇到问题 所以需要看前台代码,着手IDEA 开始 安装nodejs (为什么要安装nodejs呢,首先就是说需要npm, 而nodejs 内置npm) 1.从官网下载 nodej…...

SAP S4后的一些注意点(一)(更新中)
SAP 此外,我们必须确保 P10 中所有新的 Unicore 代码都是云就绪的。因此,在 ATC 中增加了一项新的检查(自定义),以证明代码的云就绪性。此外,我们还在 ADT 中安装了一个名为 ABAP Cleaner 的新插件…...

Python高级语法----深入asyncio:构建异步应用
文章目录 异步I/O操作示例:异步网络请求异步任务管理示例:并发执行多个任务使用异步队列示例:生产者-消费者模式在现代软件开发中,异步编程已经成为提高应用性能和响应性的关键技术之一。Python的asyncio库为编写单线程并发代码提供了强大的支持。本文将深入探讨asyncio的三…...
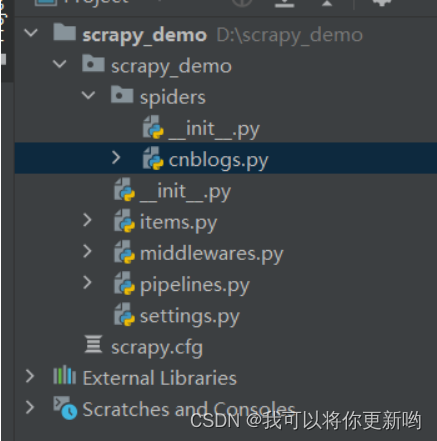
5-爬虫-打码平台、打码平台自动登录打码平台、selenium爬取京东商品信息、scrapy介绍安装、scrapy目录结构
1 打码平台 1.1 案例 2 打码平台自动登录打码平台 3 selenium爬取京东商品信息 4 scrapy介绍安装 5 scrapy目录结构 1 打码平台 # 1 登录某些网站,会有验证码---》想自动破解-数字字母:python模块:ddddocr-计算题,成语题…...

HTTPS 的工作原理是什么?
HTTPS(HyperText Transfer Protocol Secure)是一种通过加密和认证保护数据传输安全的通信协议。它是基于传统的 HTTP 协议,通过使用 SSL(Secure Sockets Layer)或 TLS(Transport Layer Security)…...
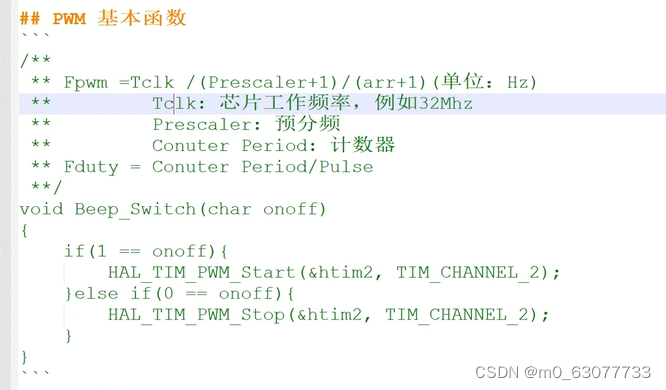
【STM32】TIM2的PWM:脉冲宽度调制
PWM是一种周期固定,脉宽可调整的输出波形。 0.通用寄存器输出 1.捕获/比较通道1的主电路--中间部分 2.捕获/比较通道的输出部分--输出 3.通用定时器输出PWM原理 PWM波周期或者频率由ARR(就是要进递增/递减的值)决定,PWM波占空比由…...

DRF 学习
一、安装DRF 1、pip install djangorestframework -i https://pypi.douban.com/simple 2、pip install pymysql -i https://pypi.douban.com/simple 二、创建Django项目 1、django-admin startproject drfdemo 三、添加rest_framework应用 1、INSTALLED_APPS …...
)
别再硬编码了!用状态机重构你的STM32F4循迹小车代码(附HAL库例程)
用状态机重构STM32F4循迹小车:告别硬编码的工程化实践 在嵌入式开发中,处理多传感器输入和控制逻辑时,新手常陷入if-else或switch-case的硬编码陷阱。我曾见过一个典型的五路循迹小车项目,原始代码用超过20个条件判断处理传感器组…...

Free-NTFS-for-Mac:为Mac用户打破NTFS读写壁垒的开源解决方案
Free-NTFS-for-Mac:为Mac用户打破NTFS读写壁垒的开源解决方案 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and manage…...

C++类的定义与实现
一、类的定义根据C Primer中的描述,类的定义是一种将抽象转换为用户定义类型的C工具。也就是说类的实质是一种用户自定义类型,它可以将数目表示和操作数据的方法组合成一个整洁的包。在实际开发当中,想要实现一个类,并编写一个使用…...

从JTAG到AS:一文搞懂EP4CE10E22C8N的nCONFIG、nSTATUS、DATA0等配置引脚实战用法
从JTAG到AS:EP4CE10E22C8N配置引脚实战全解析 在嵌入式系统设计中,FPGA的配置流程往往是硬件工程师最容易忽视却又最关键的环节之一。EP4CE10E22C8N作为Cyclone IV系列中的经典型号,其灵活的配置选项和丰富的引脚功能,既带来了设计…...
)
告别角度模糊:手把手教你用三天线相位法提升雷达测角精度(附Matlab仿真)
三天线相位法实战:从多值性破解到毫米波雷达高精度测角 毫米波雷达在自动驾驶和工业检测中的核心价值,往往取决于其角度测量精度。当我在调试一款77GHz车载雷达时,发现双天线系统在30米外对相邻车道的车辆出现角度跳变——这正是经典的多值性…...

ChanlunX:当缠论技术分析遇上C++工程化实践
ChanlunX:当缠论技术分析遇上C工程化实践 【免费下载链接】ChanlunX 缠中说禅炒股缠论可视化插件 项目地址: https://gitcode.com/gh_mirrors/ch/ChanlunX 在技术分析领域,缠论以其严谨的数学结构和递归分析框架而闻名,但传统的手工绘…...

推荐一款创新的滚动视图库:PullScrollView
推荐一款创新的滚动视图库:PullScrollView 【免费下载链接】PullScrollView 1.仿照新浪微博Android客户端个人中心的ScrollView,下拉背景伸缩回弹效果。 2.ScrollView仿IOS回弹效果。 项目地址: https://gitcode.com/gh_mirrors/pu/PullScrollView …...

别再傻傻分不清了!从手机屏幕的‘尼特’到摄影的‘勒克斯’,一文搞懂光度学与辐射度学
从手机屏幕到摄影灯光:解密光度学与辐射度学的日常应用 每次选购手机时,我们总会被各种参数包围——"峰值亮度1500尼特"、"自动调节至1尼特"、"最低照度0.5勒克斯"。这些看似简单的数字背后,隐藏着两个关键学科…...

React Boilerplate接近检测与交互优化:构建现代化用户体验的终极指南
React Boilerplate接近检测与交互优化:构建现代化用户体验的终极指南 【免费下载链接】react-boilerplate 🔥 A highly scalable, offline-first foundation with the best developer experience and a focus on performance and best practices. 项目…...

用AutoJs脚本一键直达X书任意页面:从个人主页到商品搜索的Scheme实战
AutoJs与X书Scheme深度整合:打造安卓自动化效率神器 在移动互联网时代,我们每天要重复打开各种App、点击多层菜单才能到达目标页面。有没有想过,只需一个点击就能直达X书的商品搜索页、个人主页或消息中心?AutoJs作为安卓平台强大…...