图像相机-相机属性SDK汇总设置
文章目录
- 彩色相机设置
- 彩色分辨率设置(TY_ENUM_IMAGE_MODE)
- 彩色模拟增益(TY_INT_ANALOG_GAIN)
- 彩色曝光(TY_INT_EXPOSURE_TIME)
- 彩色增益
- 彩色畸变
- 深度相机
- 设置深度分辨率(TY_ENUM_IMAGE_MODE)
- 红外
- 红外畸变
- 设备
- 激光自动开关
- 激光强度
- 持续生存状态(TY_BOOL_KEEP_ALIVE_ONOFF)
- 秩序生存状态超时(TY_INT_KEEP_ALIVE_TIMEOUT)
- 触发状态(TY_STRUCT_TRIGGER_PARAM)
- RGBD异步(TY_ENUM_IMAGE_MODE)
- 触发沿设置(TY_ENUM_TRIGGER_POL)
- 获取采图超时时间(TY_INT_CAPTURE_TIME_US)
彩色相机设置
彩色分辨率设置(TY_ENUM_IMAGE_MODE)
//可基于相机的彩色类型、分辨率来确定 可变参数TY_IMAGE_MODE_BAYER8GB_1280x960
TYSetEnum(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, TY_IMAGE_MODE_BAYER8GB_1280x960);
彩色模拟增益(TY_INT_ANALOG_GAIN)
TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_ANALOG_GAIN, 4);
彩色曝光(TY_INT_EXPOSURE_TIME)
TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, value);
彩色增益
TYSetInt(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_INT_GAIN,value);
彩色畸变
TYSetBool(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_BOOL_UNDISTORTION, true);
深度相机
设置深度分辨率(TY_ENUM_IMAGE_MODE)
//基于相机分辨率来设定对应的
TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, TY_IMAGE_MODE_DEPTH16_640x480);
红外
红外畸变
TYSetBool(hDevice, TY_COMPONENT_IR_CAM_RIGHT, TY_BOOL_UNDISTORTION, true);
设备
激光自动开关
TYSetBool(hDevice, TY_COMPONENT_LASER, TY_BOOL_LASER_AUTO_CTRL, true);
激光强度
//设置前关闭自动开关
TYSetInt(hDevice, TY_COMPONENT_LASER, TY_INT_LASER_POWER, value);
持续生存状态(TY_BOOL_KEEP_ALIVE_ONOFF)
TYSetBool(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_KEEP_ALIVE_ONOFF, false);
秩序生存状态超时(TY_INT_KEEP_ALIVE_TIMEOUT)
//2000-30000,单位:毫秒。默认15s
TYSetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_KEEP_ALIVE_TIMEOUT, value);
触发状态(TY_STRUCT_TRIGGER_PARAM)
TY_TRIGGER_PARAM trigger;
trigger.mode = TY_TRIGGER_MODE_OFF;
ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger,sizeof(trigger)));
RGBD异步(TY_ENUM_IMAGE_MODE)
TYSetEnum(hDevice, TY_COMPONENT_DEVICE, TY_ENUM_STREAM_ASYNC, TY_STREAM_ASYNC_ALL);
触发沿设置(TY_ENUM_TRIGGER_POL)
//上升沿
TYSetEnum(hDevice, TY_COMPONENT_DEVICE, TY_ENUM_TRIGGER_POL, TY_TRIGGER_POL_RISINGEDGE);
//下降沿
TYSetEnum(hDevice, TY_COMPONENT_DEVICE, TY_ENUM_TRIGGER_POL, TY_TRIGGER_POL_FALLINGEDGE);
获取采图超时时间(TY_INT_CAPTURE_TIME_US)
TYGetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_CAPTURE_TIME_US, &capture_time)
相关文章:

图像相机-相机属性SDK汇总设置
文章目录 彩色相机设置彩色分辨率设置(TY_ENUM_IMAGE_MODE)彩色模拟增益(TY_INT_ANALOG_GAIN)彩色曝光(TY_INT_EXPOSURE_TIME)彩色增益彩色畸变 深度相机设置深度分辨率(TY_ENUM_IMAGE_MODE&…...
使用ffmpeg调用电脑自带的摄像头和扬声器录制音视频
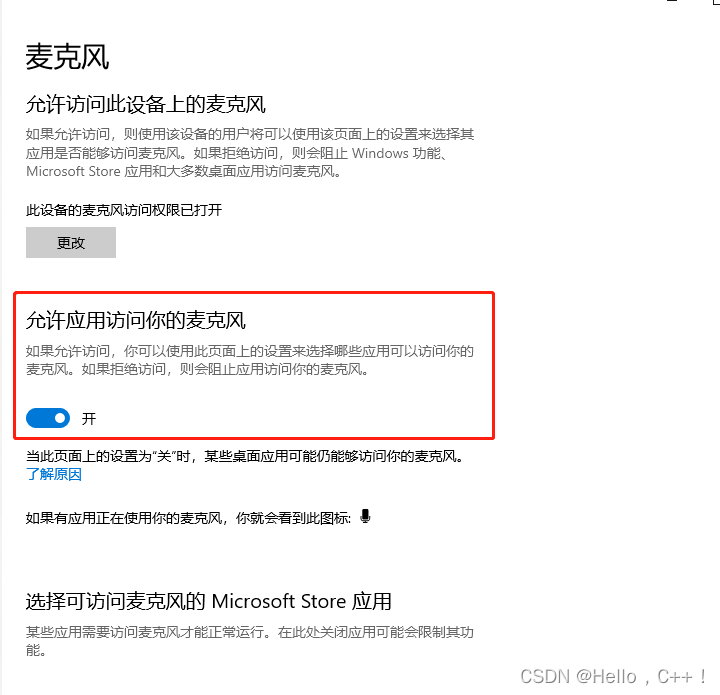
1、打开cmd,执行chcp 65001,修改cmd的编码格式为utf8,避免乱码 2、执行指令ffmpeg -list_devices true -f dshow -i dummy,查看当前window的音频和视频名称 3、打开windows系统的"打开声音设置"–“麦克风隐私设置”–"允许应用访问你…...
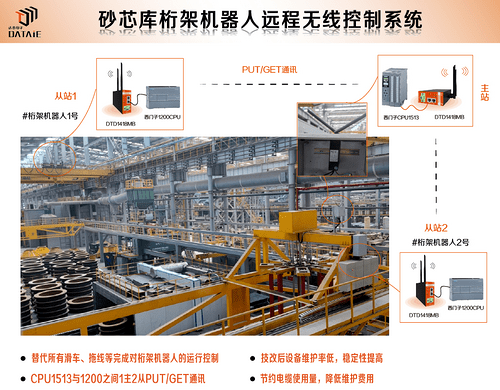
工业物联网模块应用之砂芯库桁架机器人远程无线控制
一、应用背景 在铸管车间无线技改项目中,客户需要构建智能化砂芯库,要求各库存的规格、数量、位置坐标等数据实时可显。此外,还需具备自动入库及出库功能,用于将出炉后的成摞砂芯及时码放至砂芯库的预设位置,当离心机…...

Ubuntu安装.Net SDK
参考微软文档:在 Linux 上安装 .NET选择自己对应系统版本的链接辅助即可。 我这里使用的是 Ubuntu 20.04,因为在这个版本.Net 在Ubuntu包源存储库中不可用,需要手动添加Microsoft包存储库。 使用 APT 进行安装可通过几个命令来完成。 安装 …...
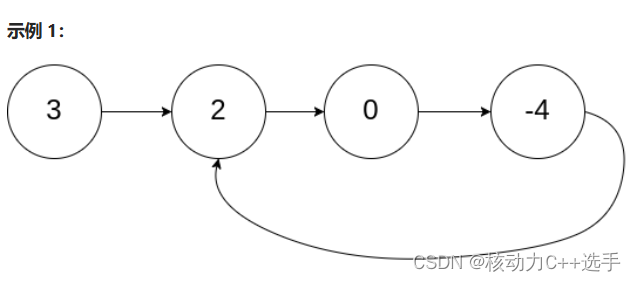
相交链表~
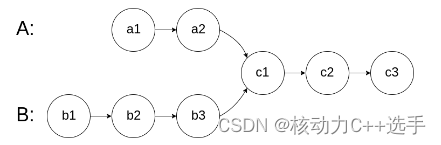
题目描述 给你两个单链表的头节点 headA和headB,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null。图示两个链表在节点 c1 开始相交: 题目数据保证整个链式结构中不存在环。注意,函数返回结果后&…...

跨境电商API接口如何通过API数据接口进行选品
一、了解API及其重要性 API,即应用程序接口,是一种提供给开发者使用的工具,使他们能够通过编程方式访问和操作另一个应用程序的功能。在跨境电商领域,API通常被用于连接电商平台、支付系统、物流服务等,以实现数据的共…...
)
ArrayList集合方法(自写)
以下方法在使用时需要new一个新对象调用,输出时需要一个输出方法,否则输出的是地址 1.最后位置插入 //最后位置插入 public void add(int element){if (size>arr.length){capacity*factor;int[] tempnew int[capacity];for (int i 0; i <arr.le…...
sql注入学习笔记
sql注入原理 掌握sql注入漏洞的原理掌握sql注入漏洞的分类 万能用户名 777 or 11 #原句 select userid from cms_users where username ".$username." and password".md5 ( $password ) ."输入过后为 select userid from cms_users where username …...
企业涉密文件怎么加密?企业重要文件加密方法
对于一个企业来说,涉密文件的重要性不言而喻,我们需要使用专业的方法来保护企业重要文件。那么,企业涉密文件该怎么加密呢?下面我们来一起了解一下。 本地文件加密 针对在电脑本地保存的文件,我们可以使用超级加密300…...

经典猜数游戏(python类封装)
五次机会猜测100以内随机正整数,我用初通的python类封装了代码并清屏上一次猜测提示,难有所增加咯。 (笔记模板由python脚本于2023年11月09日 12:31:30创建,本篇笔记适合掌握python循环和条件分支语句用法,初通python类的coder翻阅…...
环形链表~
题目描述 给你一个链表的头节点 head ,判断链表中是否有环。如果链表中存在环,则返回true。否则,返回false 。 解题思路 采用快慢指针的思想,创建fast和slow一快一慢指针,slow一次走一步,fast一次走两步&…...
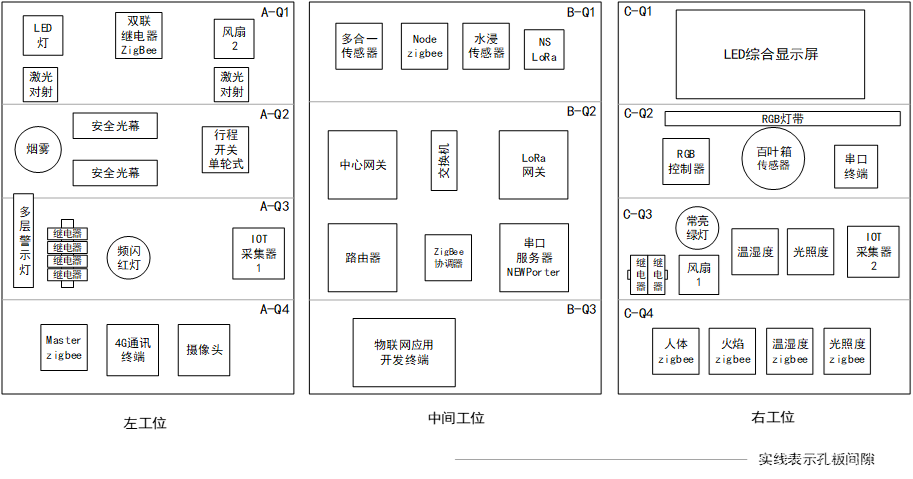
GZ038 物联网应用开发赛题第1套
2023年全国职业院校技能大赛 高职组 物联网应用开发 任 务 书 (第1套卷) 工位号:______________ 第一部分 竞赛须知 一、竞赛要求 1、正确使用工具,操作安全规范; 2、竞赛过程中如有异议,可向现场考评人员反映,不得扰乱赛场秩序; 3、遵守赛场纪律,尊重考评人员…...

SQL关键字
SQL关键字包括以下内容: SELECT:从数据库表中查询数据 FROM:指定数据源表 WHERE:筛选满足条件的数据 GROUP BY:按照列或表达式将数据分组 HAVING:筛选分组后满足条件的数据 ORDER BY:按照列或表…...
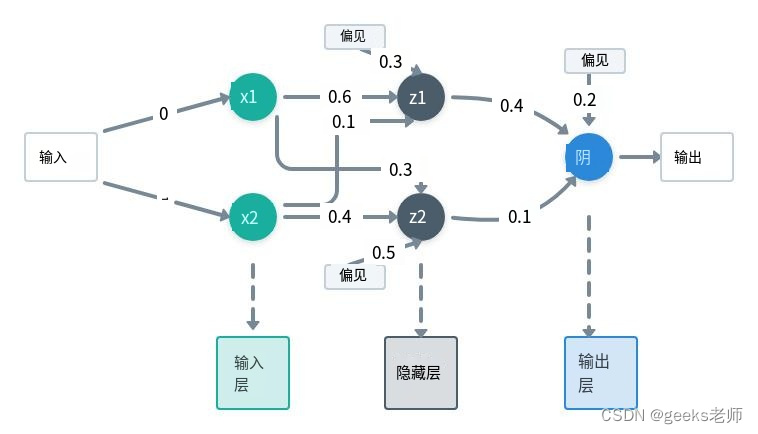
第三章:人工智能深度学习教程-基础神经网络(第五节-了解多层前馈网络)
让我们了解反向传播网络 (BPN) 中的误差是如何计算的以及权重是如何更新的。 考虑下图中的以下网络。 反向传播网络(BPN) 上图中的网络是一个简单的多层前馈网络或反向传播网络。它包含三层,输入层有两个神经元 x 1和 x 2,隐藏层有两个神经元 z 1和 z 2,输出层有一个神经…...
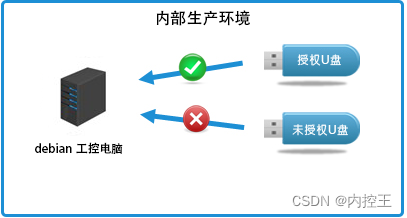
如何实现Debian工控电脑USB接口安全管控
Debian 作为工控电脑操作系统具有稳定性、安全性、自定义性和丰富的软件包等优势,适用于要求高度可靠性和安全性的工控应用。 Debian 作为工控电脑操作系统在工业控制领域有很大优势,包括: 稳定性:Debian 的发布版以其稳定性而闻…...

开源知识库软件xwiki在Windows下的安装
文章目录 开源知识库软件-xwiki在windows上的部署0、参考文档1、前置环境准备1.1、Windows版本及系统配置1.2、JDK11安装1.3、Tomcat9安装1.4、MySQL5.7数据库的安装 2、xwiki安装3、配置3.1、修改配置支持对文档内容进行搜索 4、问题解决4.1、附件无法上传问题4.1、附件无法下…...

学习c#的第一天
目录 C# 简介 C# 强大的编程功能 C# 开发环境 .Net 框架(.Net Framework) C# 的集成开发环境 C# 有用的网站 C# 程序结构 C# 简介 C# 是一种由微软开发的现代、通用的面向对象编程语言,它已经得到了Ecma和ISO的认可。 C#最初是在.NE…...

机器学习实战——《跟着迪哥学Python数据分析与机器学习实战》
跟着迪哥学Python数据分析与机器学习实战 一、基础部分二、信用卡欺诈检测实战 —— 监督学习2.1 下采样与过采样2.1.1 过采样数据生成策略SMOTE 2.2 逻辑回归2.3 分类结果混淆矩阵2.4 过采样实战2.5 实战总结2.6 版本依赖排错 三、知识加油站¥银行卡的分类 一、基础…...
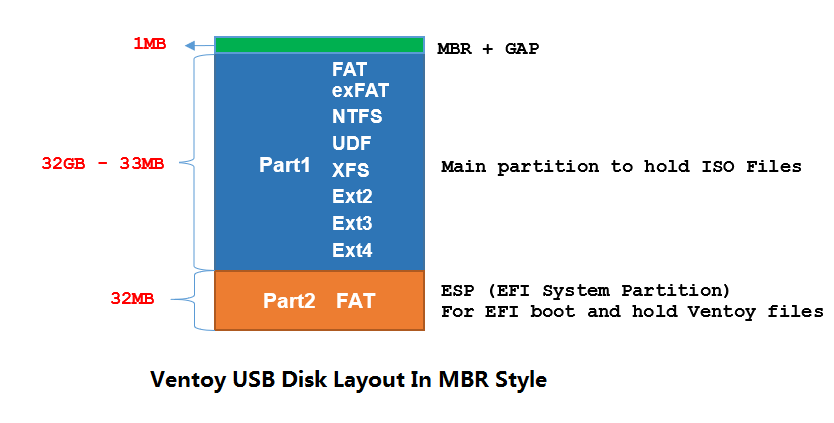
开源的全能维护 U 盘工具:Ventoy
开源的全能维护 U 盘工具:Ventoy 本篇文章聊聊迄今为止,我用着最舒服的一款开源 U 盘启动工具,Ventoy。 写在前面 好久不见,接下来计划写一个比较连续的内容,就先从最小的处着手吧。 经过长久的折腾,除…...

Redis7学习笔记01
一百零七、redis高级篇之缓存双写一致性面试题概览...

10分钟掌握正则表达式:从入门到精通的完整指南
10分钟掌握正则表达式:从入门到精通的完整指南 【免费下载链接】learn-regex Learn regex the easy way 项目地址: https://gitcode.com/gh_mirrors/le/learn-regex 正则表达式(regex)是一种强大的文本模式匹配工具,广泛应…...

Windows触控板驱动终极指南:让苹果触控板在Windows上完美运行
Windows触控板驱动终极指南:让苹果触控板在Windows上完美运行 【免费下载链接】mac-precision-touchpad Windows Precision Touchpad Driver Implementation for Apple MacBook / Magic Trackpad 项目地址: https://gitcode.com/gh_mirrors/ma/mac-precision-touc…...

终极突破:howler.js空间音频完全指南
终极突破:howler.js空间音频完全指南 【免费下载链接】howler.js Javascript audio library for the modern web. 项目地址: https://gitcode.com/gh_mirrors/ho/howler.js howler.js是一款专为现代Web设计的JavaScript音频库,其空间音频功能为开…...

从AFLW到300W-LP:头部姿态估计数据集怎么选?实战避坑与数据预处理指南
从AFLW到300W-LP:头部姿态估计数据集实战选择与预处理全攻略 当你第一次打开AFLW2000-3D数据集时,可能会被那些夸张的头部角度震惊——从几乎90度的侧脸到夸张的俯仰,这些数据真的适合训练一个驾驶员监控模型吗?作为计算机视觉领域…...

别再只用random了!用Python模拟双色球,聊聊伪随机与算法效率那点事
从双色球模拟到算法优化:Python随机数生成的深层思考 当我们在Python中敲下random.randint(1,33)时,是否思考过这行简单代码背后的复杂性?双色球模拟程序看似是个入门级练习,实则暗藏算法效率、随机性质量、工程实践三大进阶议题。…...

egergergeeert效果可视化:从模糊初稿到清晰终稿的AI迭代过程
egergergeeert效果可视化:从模糊初稿到清晰终稿的AI迭代过程 1. 引言:AI图像生成的新体验 想象一下这样的场景:你脑海中有一个绝妙的创意画面,但苦于不会绘画或设计软件操作复杂。现在,通过egergergeeert文生图镜像&…...

【HALCON 实战入门】12. 边缘检测与轮廓提取
欢迎订阅【HALCON 实战入门】专栏: 1. HALCON 简介与安装 5. 相机接入与图像采集 10. 阈值分割与目标提取 11. 区域处理与分析 12. 边缘检测与轮廓提取 13. 轮廓分析与几何特征 【HALCON 实战入门】12. 边缘检测与轮廓提取一、什么是边缘与轮廓?二、边缘…...
)
AXI事务属性避坑指南:从Cache行为反推AxCACHE信号怎么设(附常见误区)
AXI事务属性实战解析:从异常现象到信号配置的深度诊断 在复杂的芯片设计验证过程中,AXI协议的事务属性配置往往是系统调试中最隐蔽却又最关键的一环。当工程师面对"明明配置了Write-Back却看不到数据及时更新"或"预期中的传输合并未能提升…...

SAMA7D65 MPU工业级优化与实时性能解析
1. SAMA7D65 MPU 核心架构解析Microchip最新推出的SAMA7D65 MPU采用单核Arm Cortex-A7架构,主频可达1GHz,这个看似传统的配置背后隐藏着针对工业场景的深度优化。与市面上常见的Cortex-A7方案不同,SAMA7D65在三个关键维度实现了差异化设计&am…...

APK安装器技术实现深度解析:Windows原生运行安卓应用实用指南
APK安装器技术实现深度解析:Windows原生运行安卓应用实用指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer APK安装器是一个专为Windows系统设计的Androi…...