STM32F103C8T6第三天:pwm、sg90、超声波、距离感应按键开盖震动开盖蜂鸣器
1. 定时器介绍1(317.21)
- 软件定时(之前的定时方法)(软件延时)
- 缺点:不精确、占用CPU资源
void Delay500ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 4;j = 129;k = 119;do{do{while (--k);} while (--j);} while (--i);
}
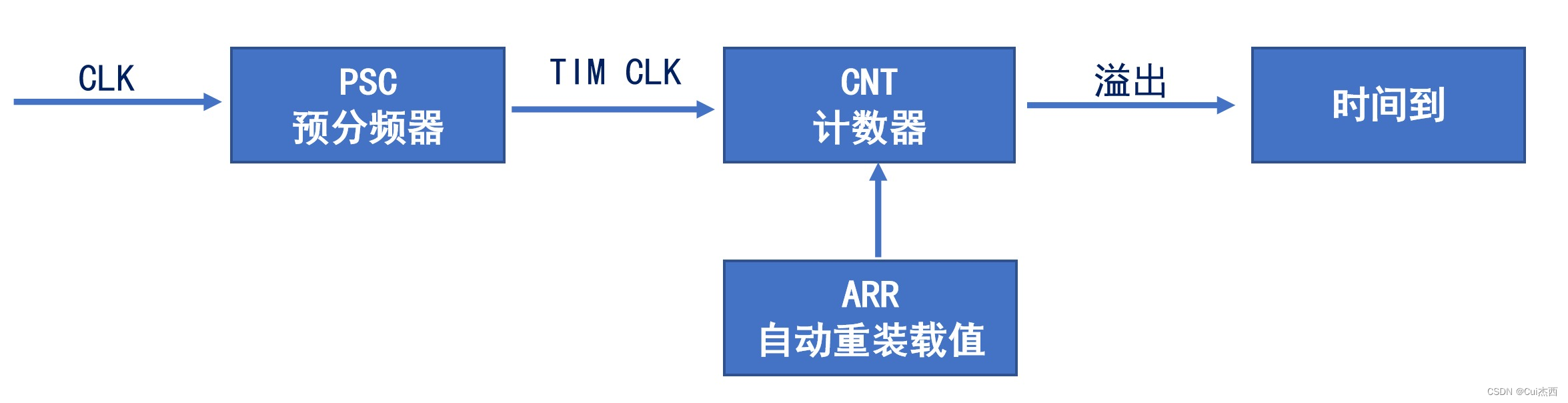
定时器工作原理:
- 使用精准的时基,通过硬件的方式,实现定时功能。定时器核心就是计数器。
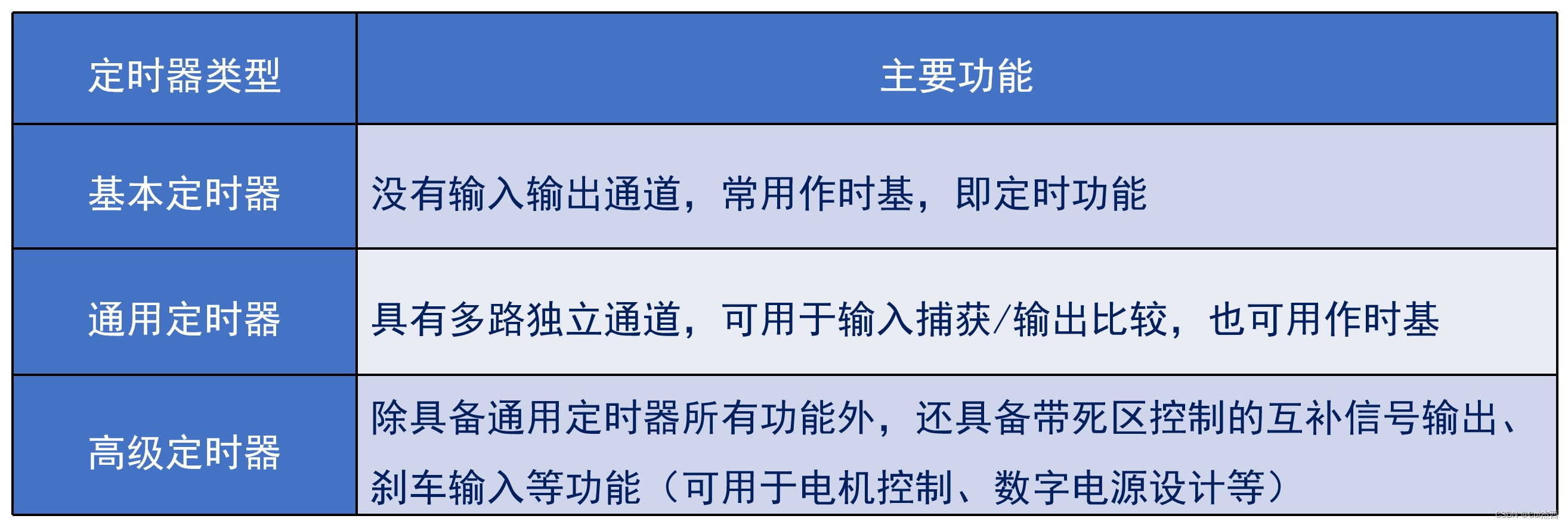
定时器分类:
- 基本定时器(TIM6 ~ TIM7)
- 通用定时器(TIM2 ~ TIM5)
- 高级定时器(TIM1 和 TIM8)
STM32F103C8T6定时器资源:

通用定时器介绍:
1) 16 位向上、向下、向上/向下自动装载计数器(TIMx_CNT)。
2) 16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为 1~65535 之间的任意数
值。
3)4 个独立通道(TIMx_CH1~4),这些通道可以用来作为:A.输入捕获B.输出比较C.PWM 生成(边缘或中间对齐模式)D.单脉冲模式输出
4)可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电
路。
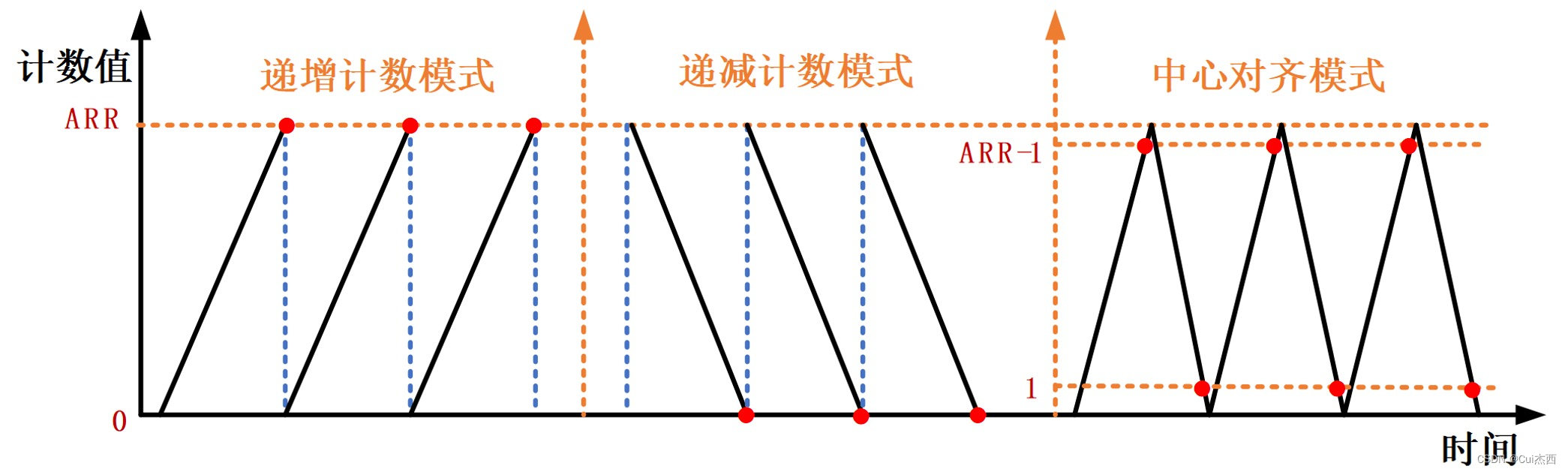
定时器计数模式:
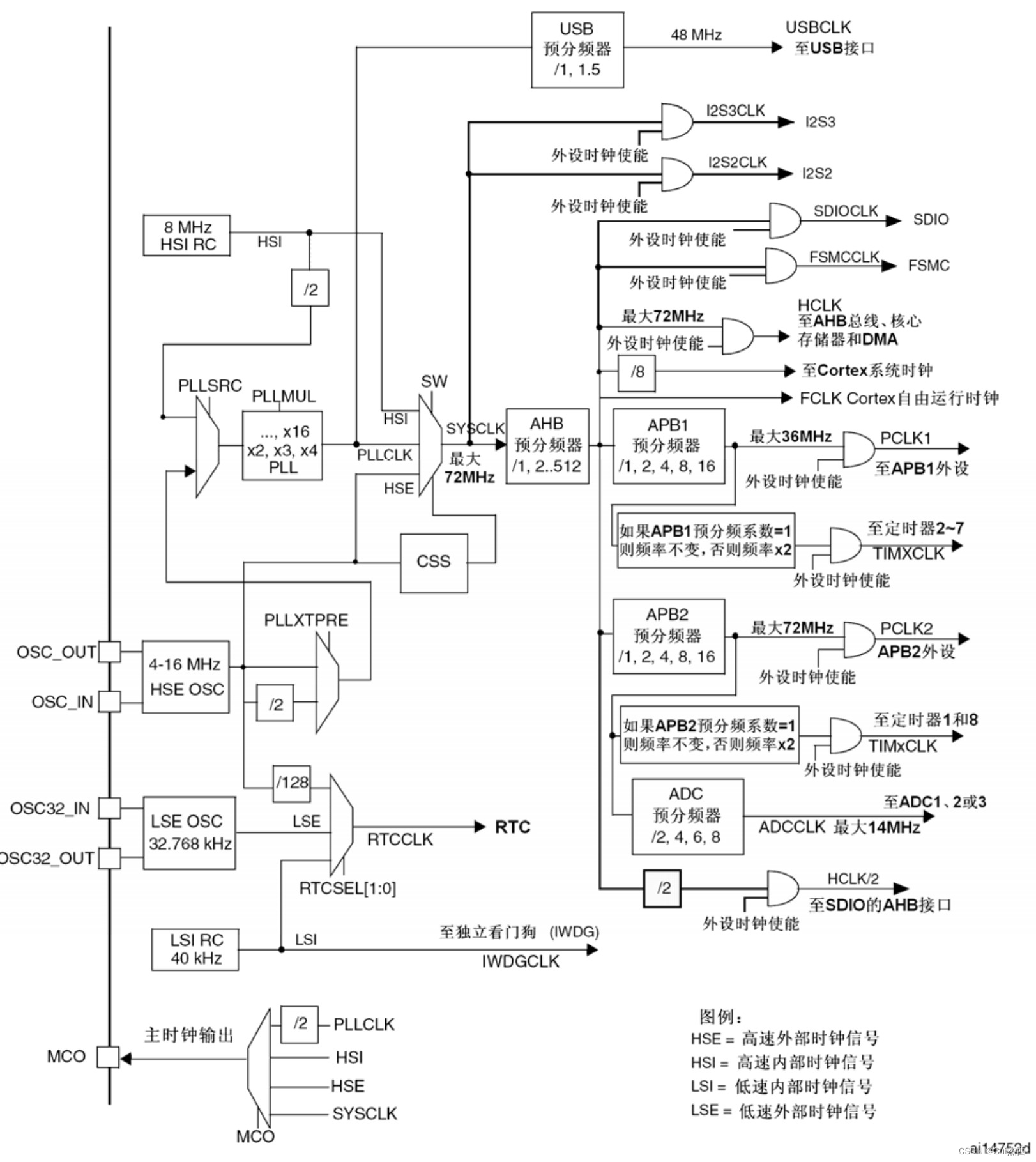
定时器时钟源:
5)如下事件发生时产生中断/DMA:A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)B.触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)C.输入捕获D.输出比较E.支持针对定位的增量(正交)编码器和霍尔传感器电路F.触发输入作为外部时钟或者按周期的
2. 定时器介绍1(318.22)
定时器计数模式:

定时器时钟源:
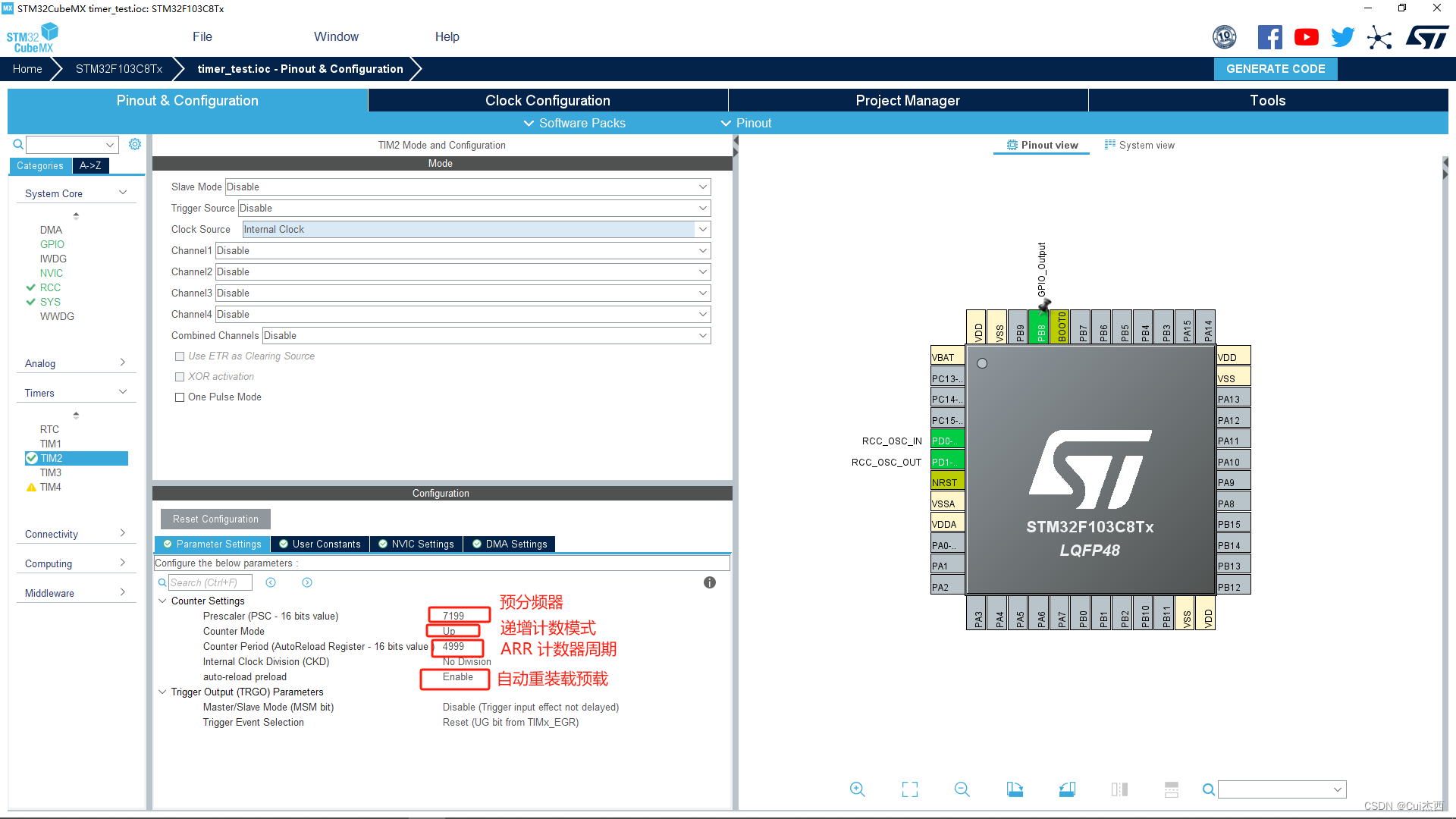
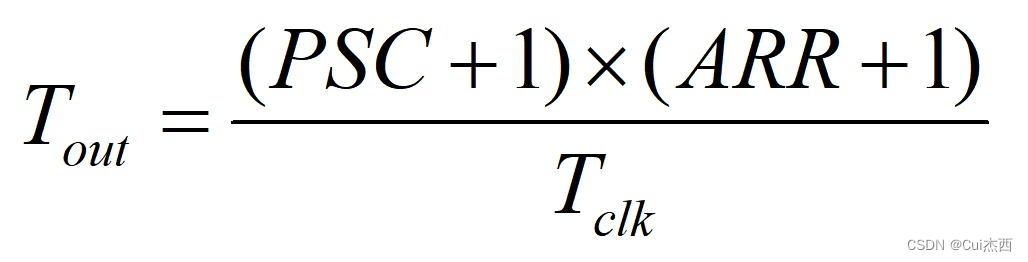
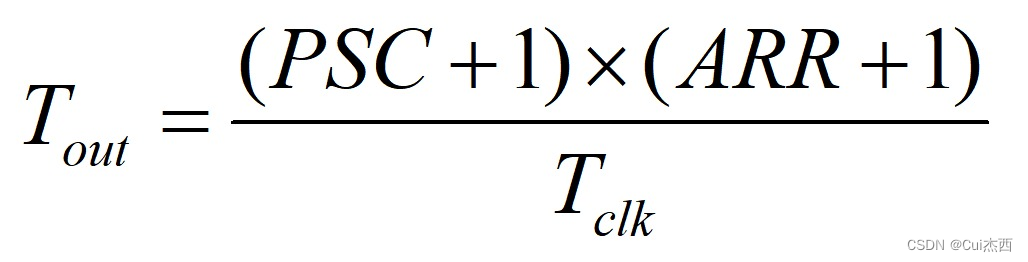
定时器溢出时间计算公式:(加一是因为计算机是从0开始计数的)
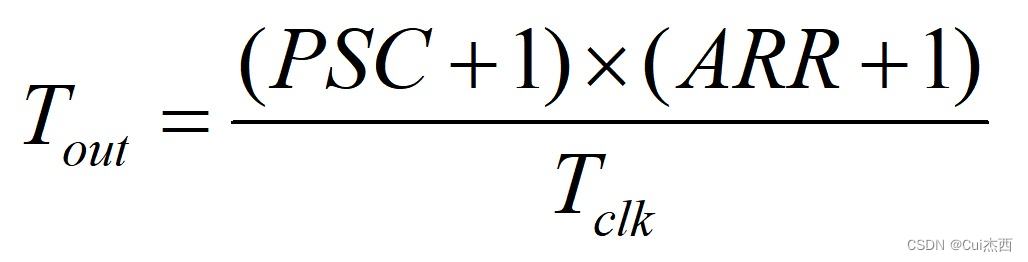
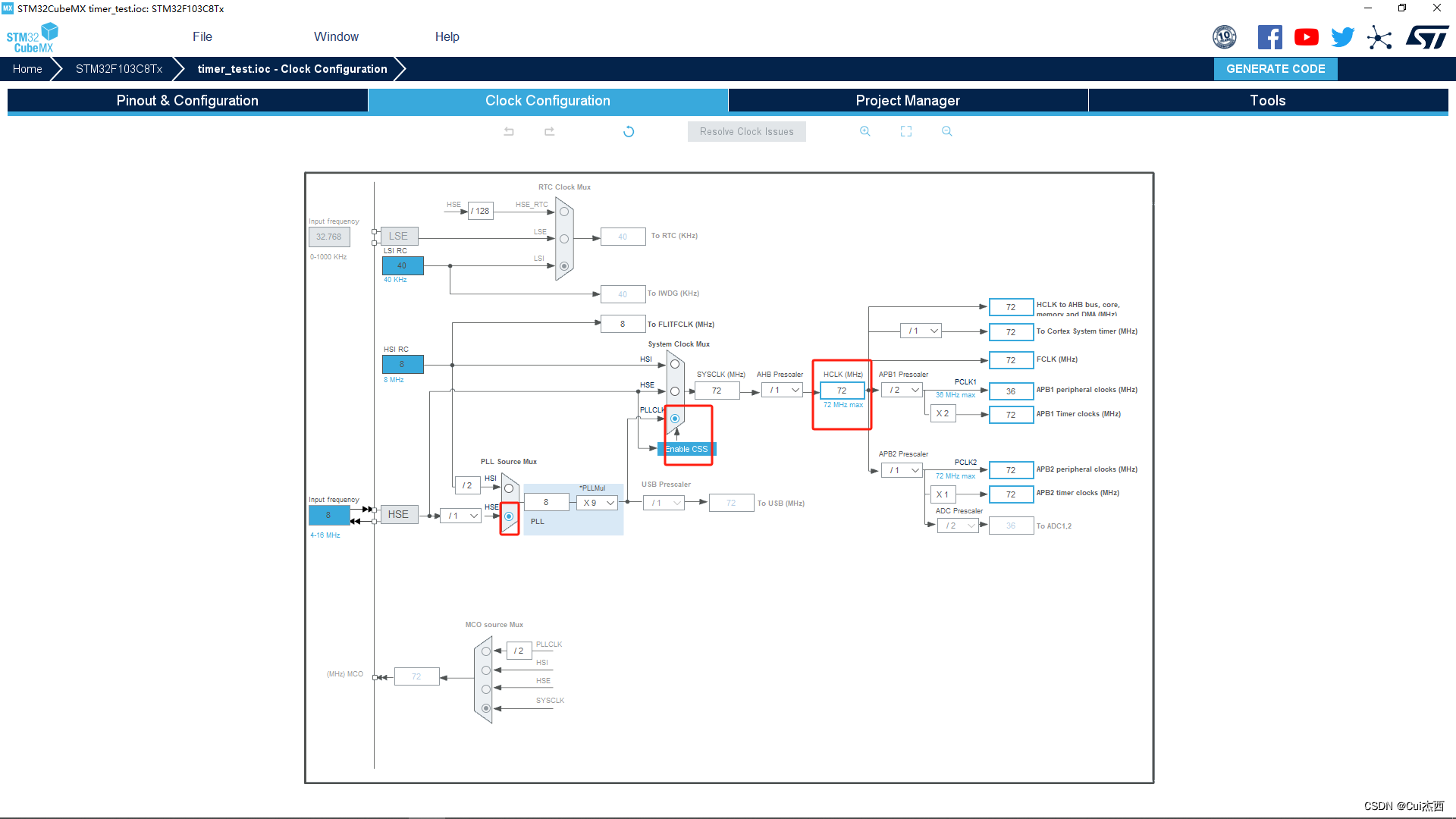
- 例如,要定时500ms(0.5s),则:PSC=7199,ARR=4999,Tclk=72M(72000000Hz)
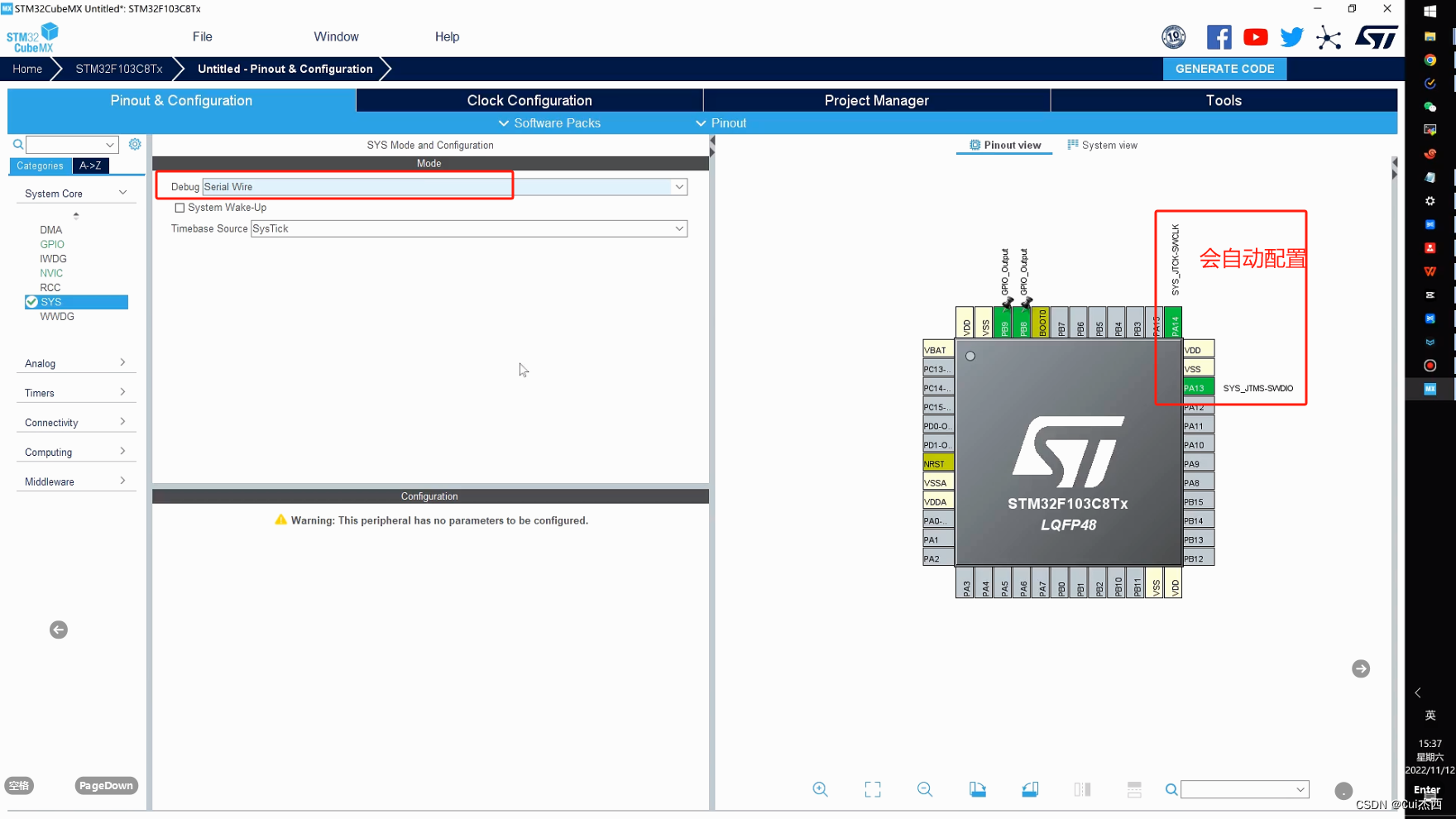
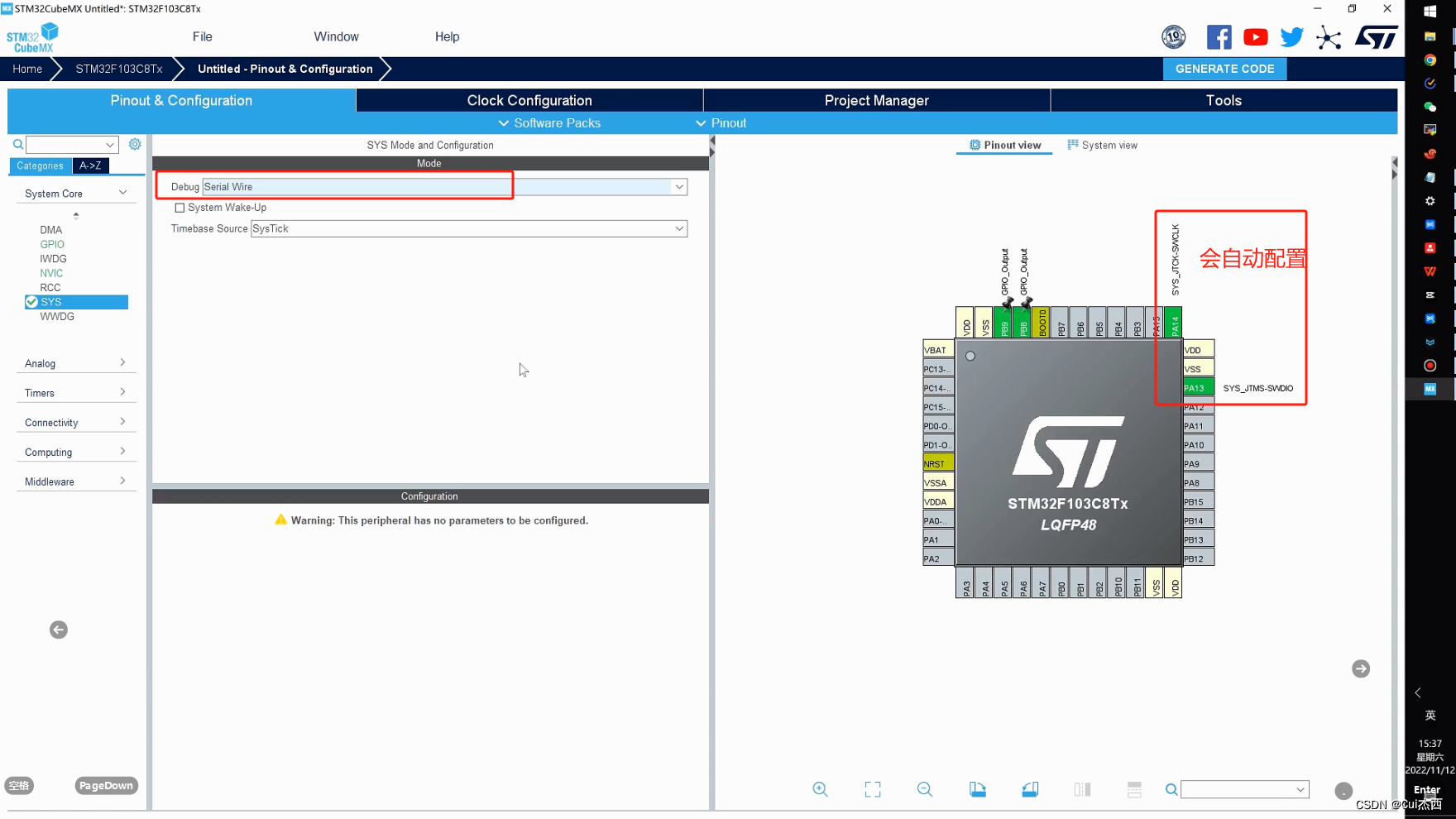
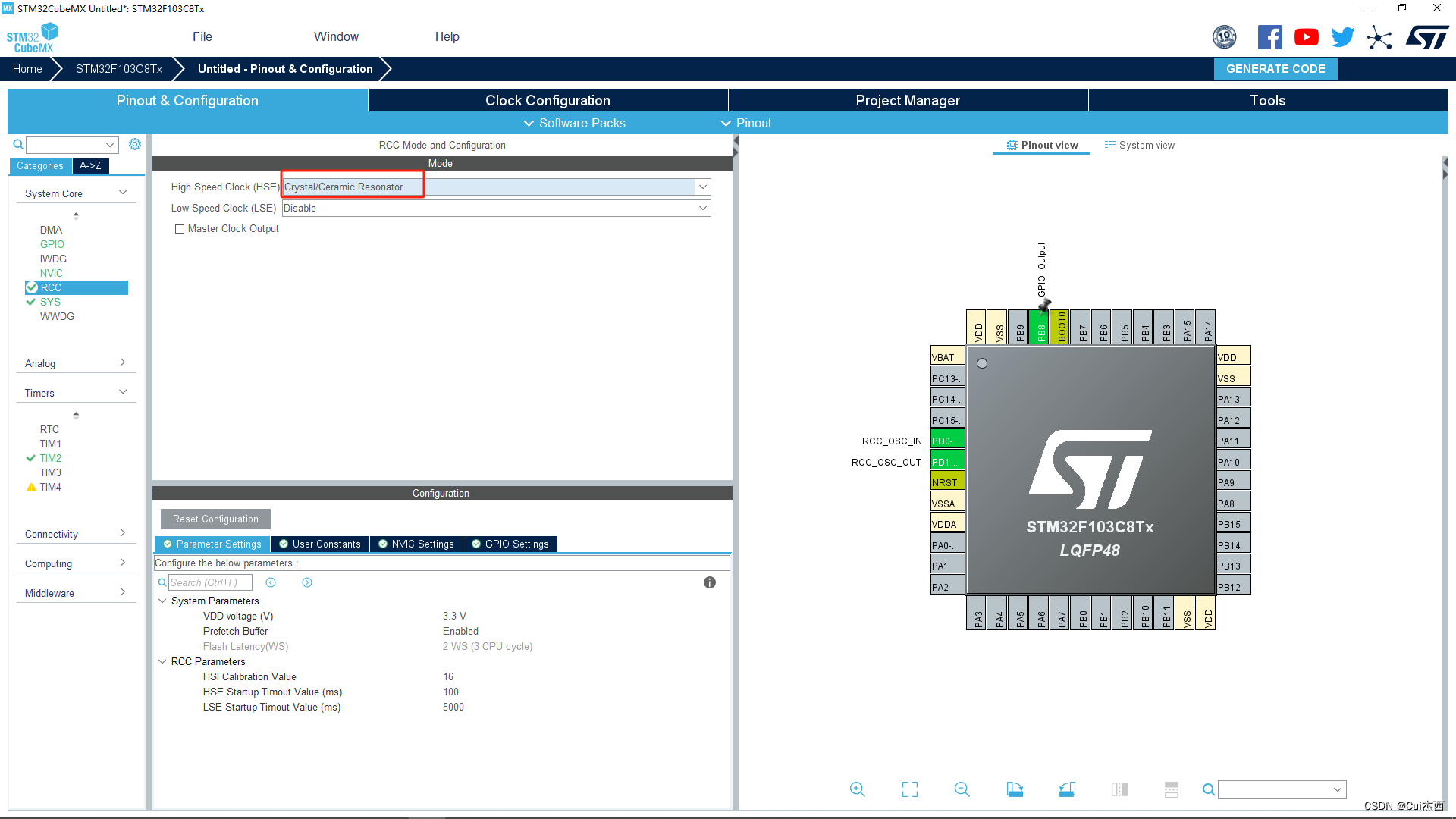
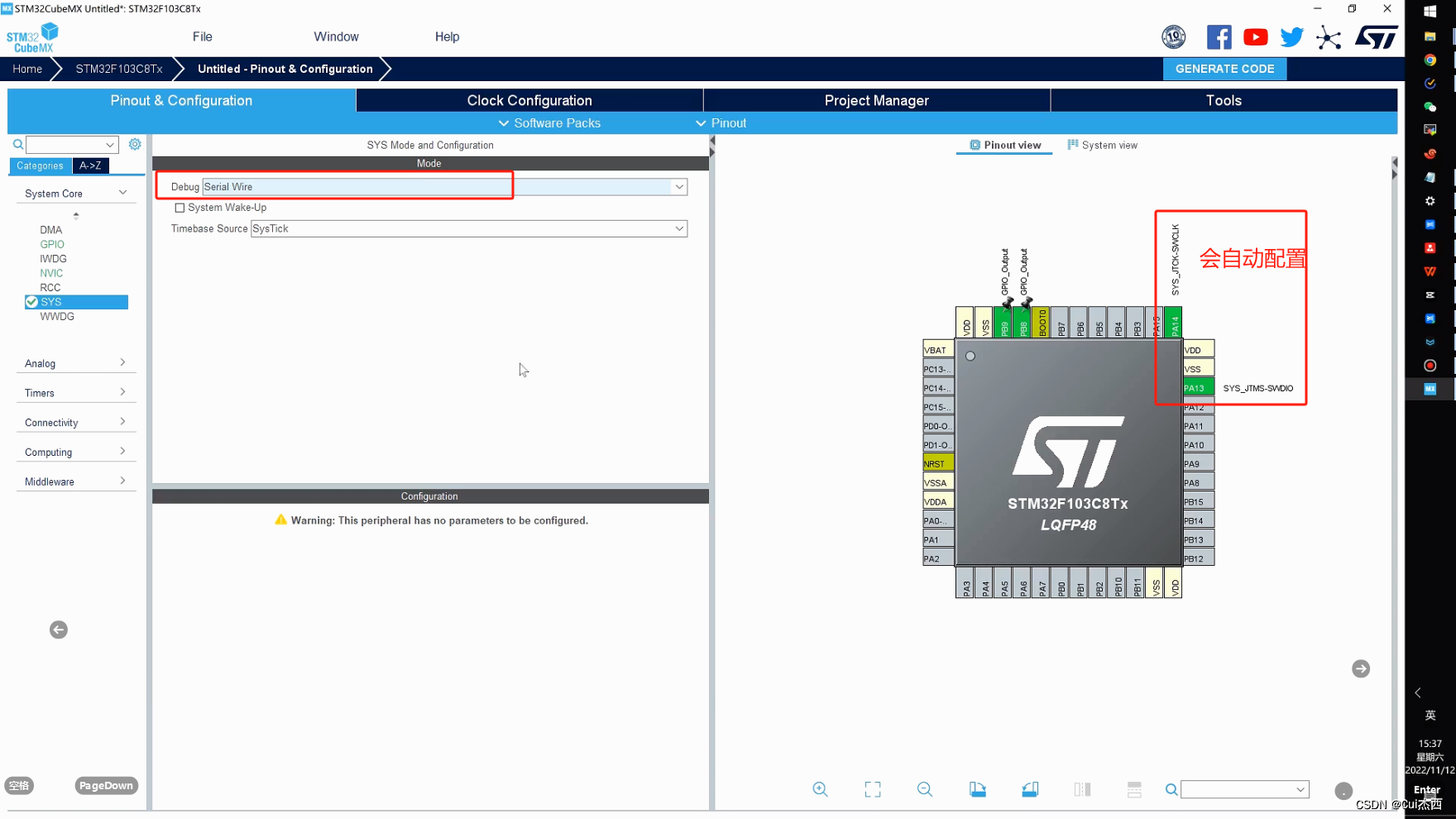
3. 使用定时器中断点亮LED灯(319.23)
- 需求:使用定时器中断方法,每500ms翻转一次LED1灯状态。
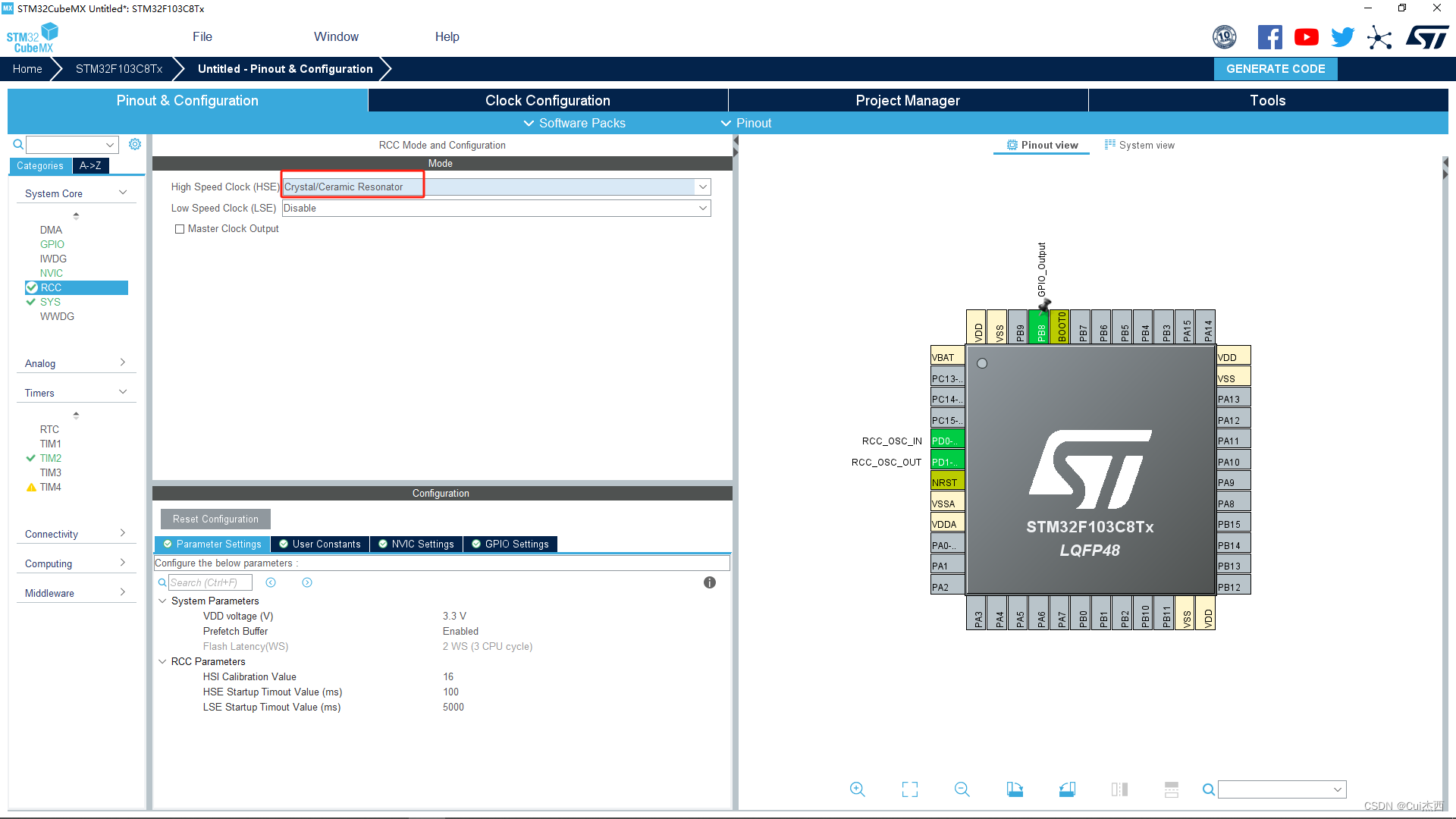
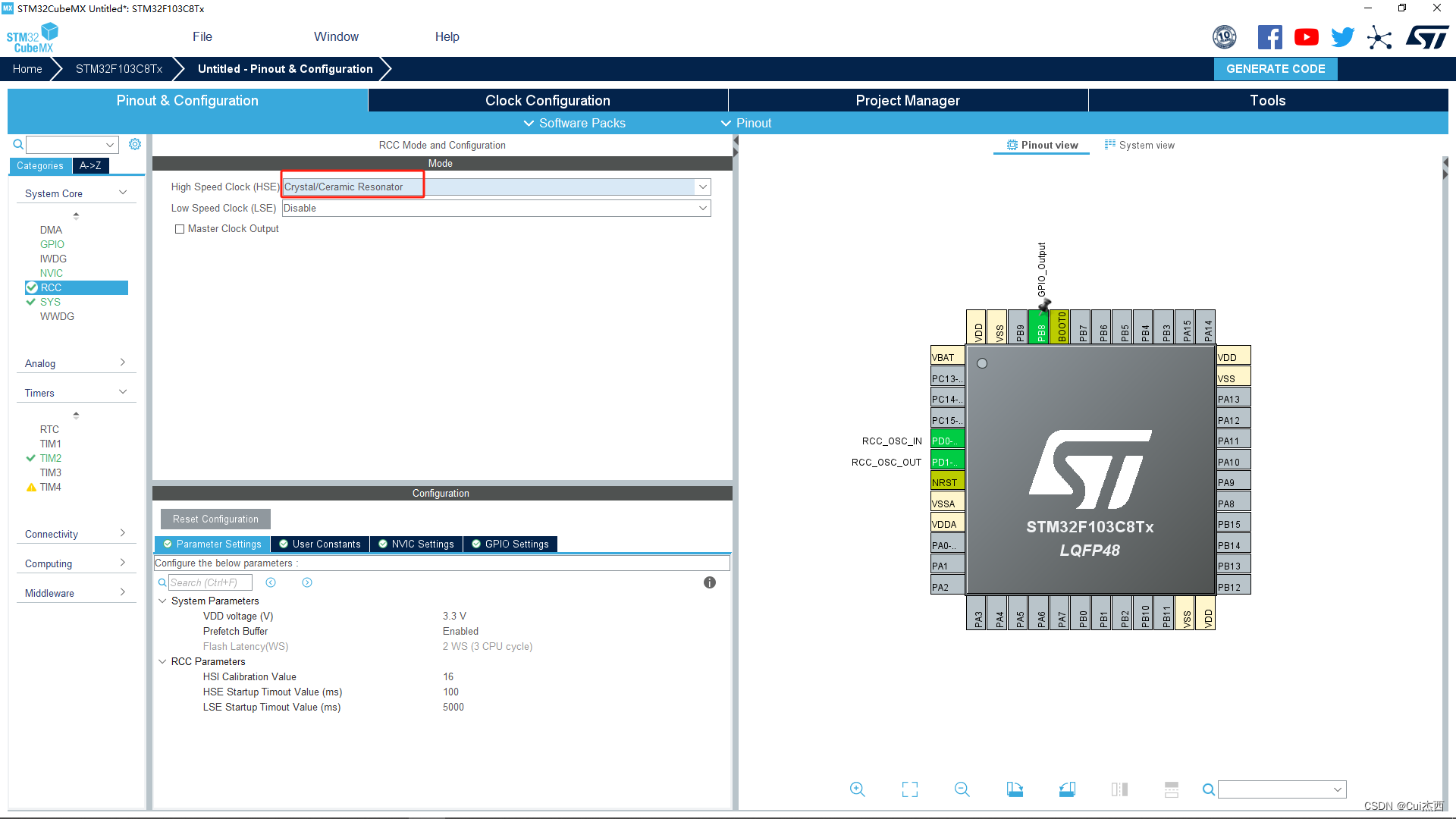
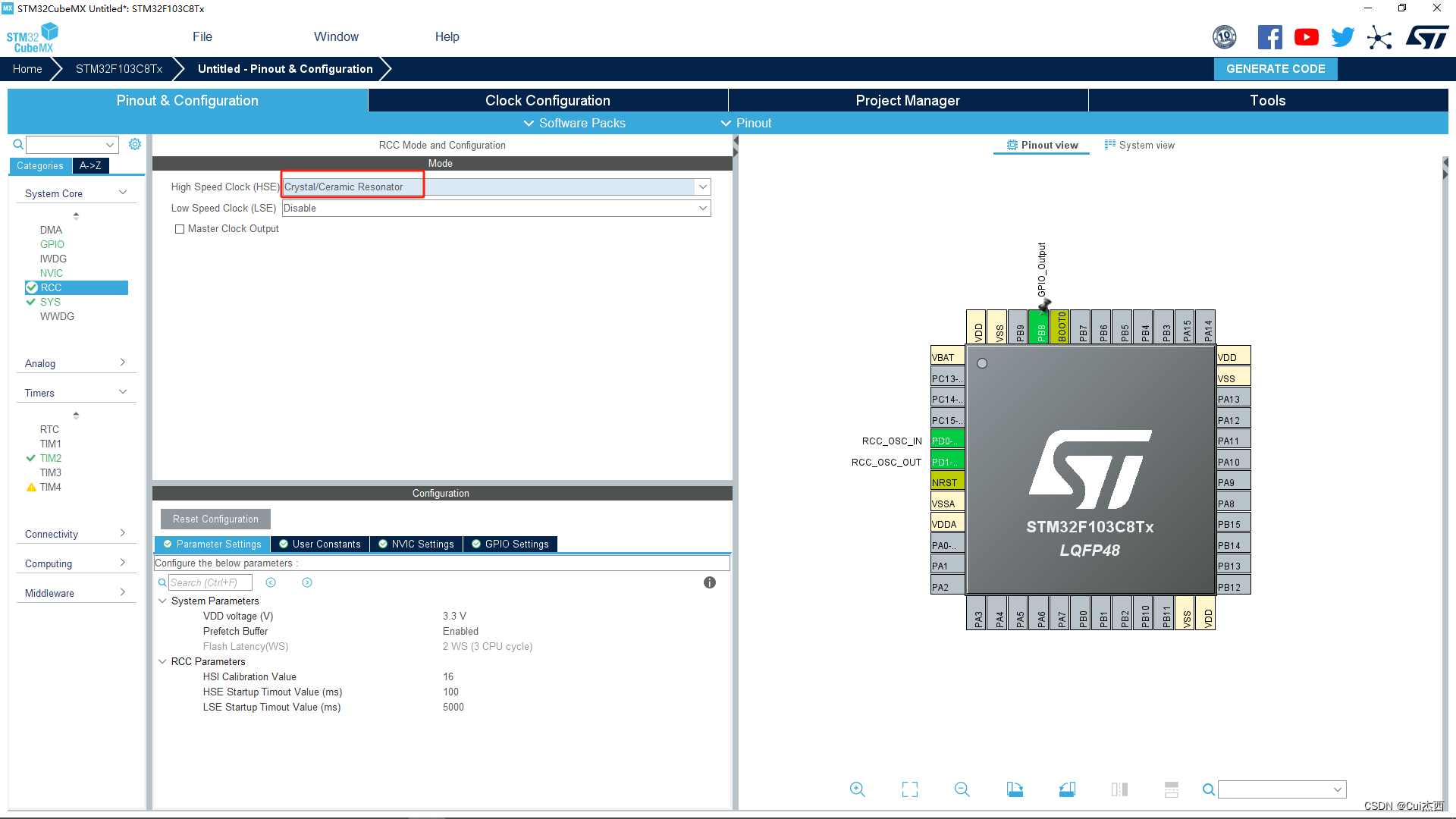
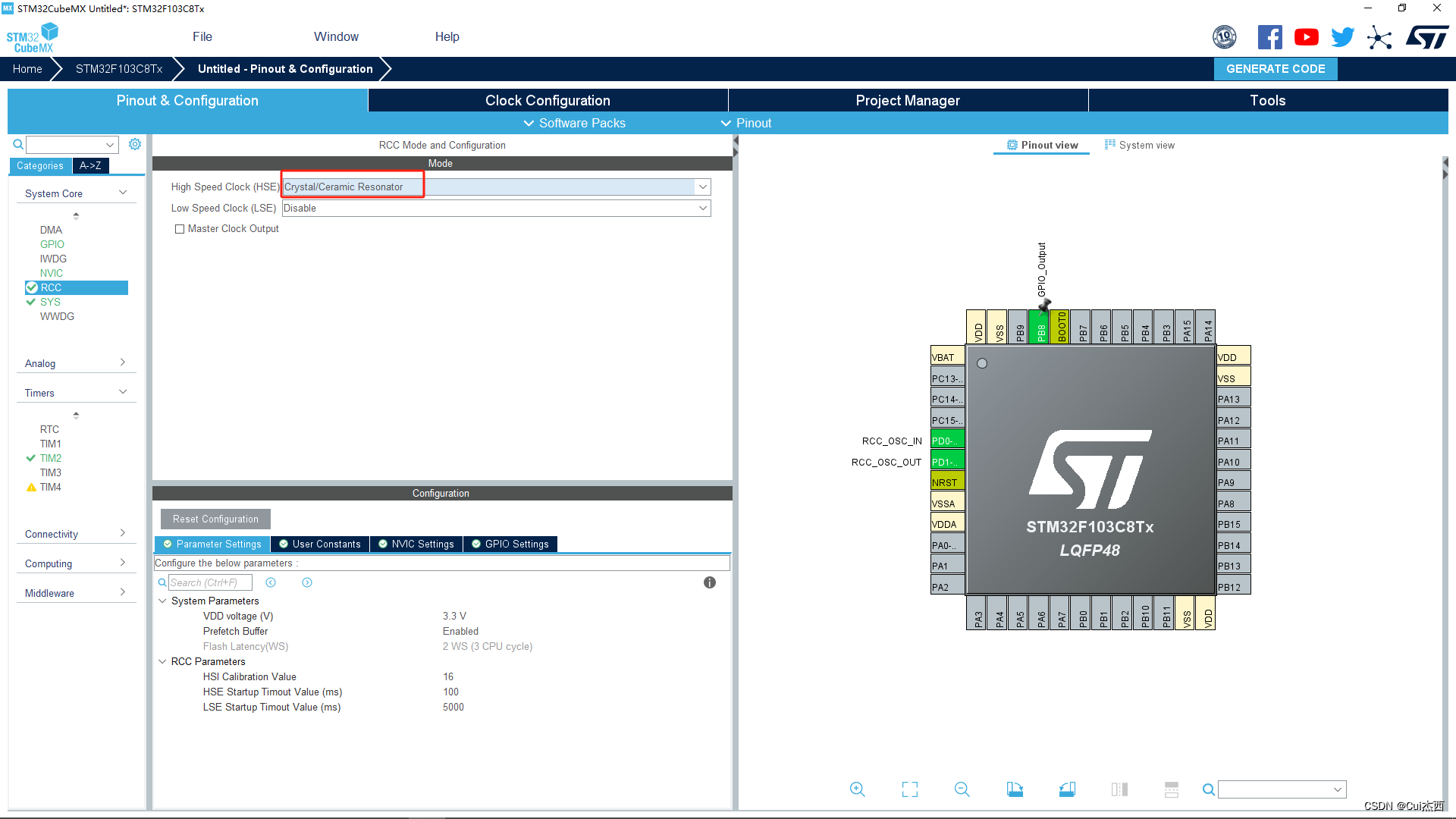
- RCC配置
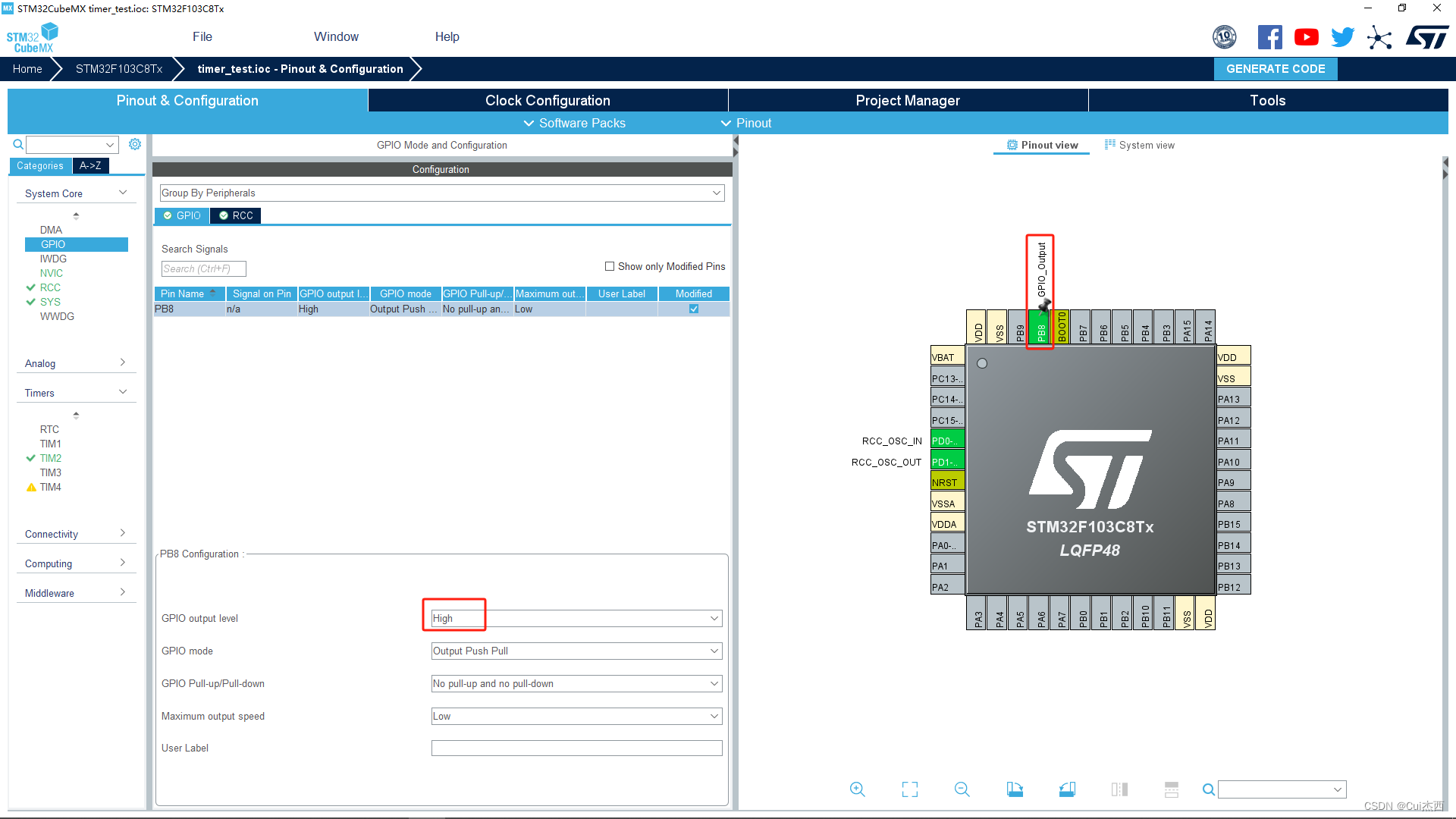
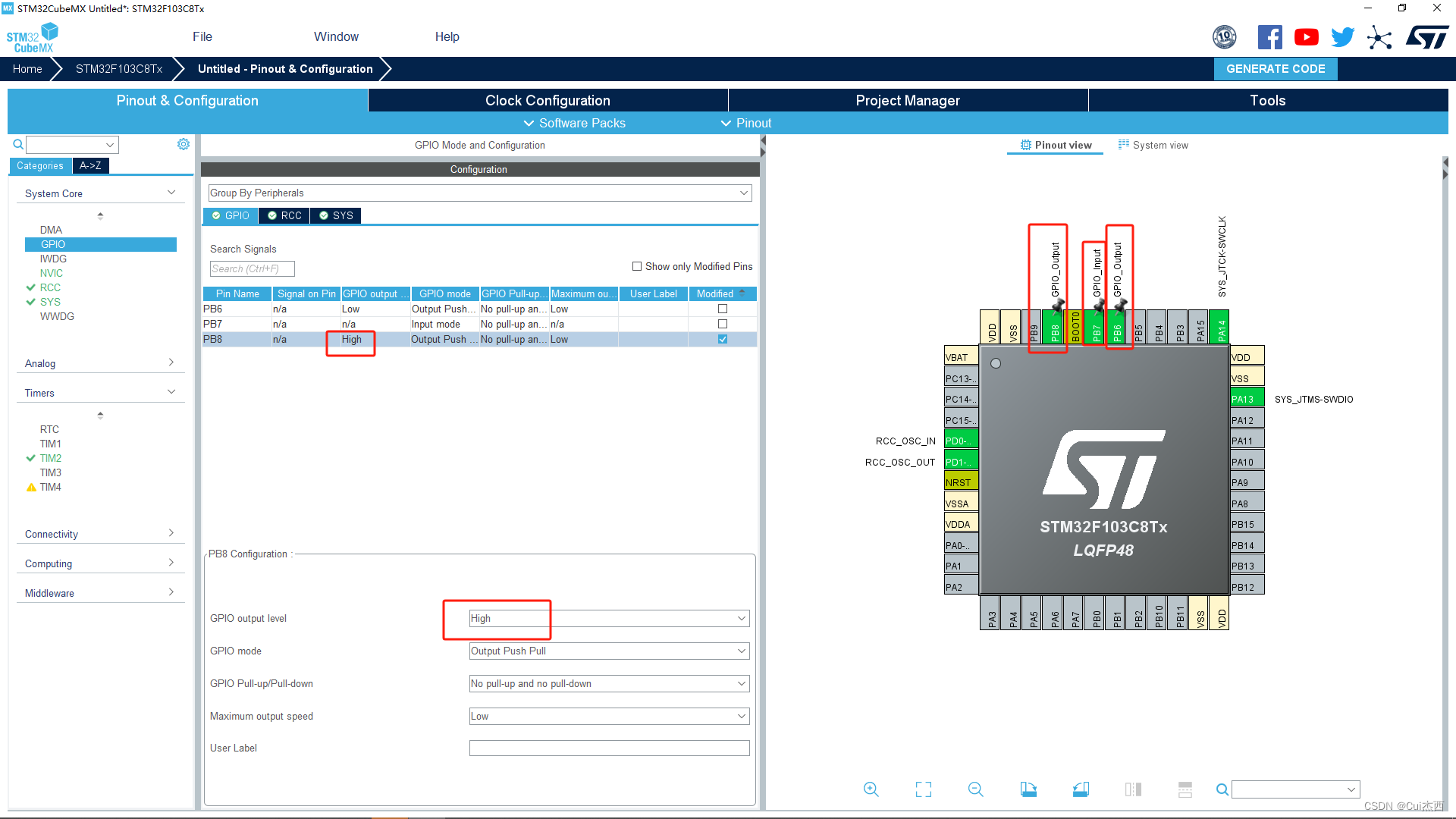
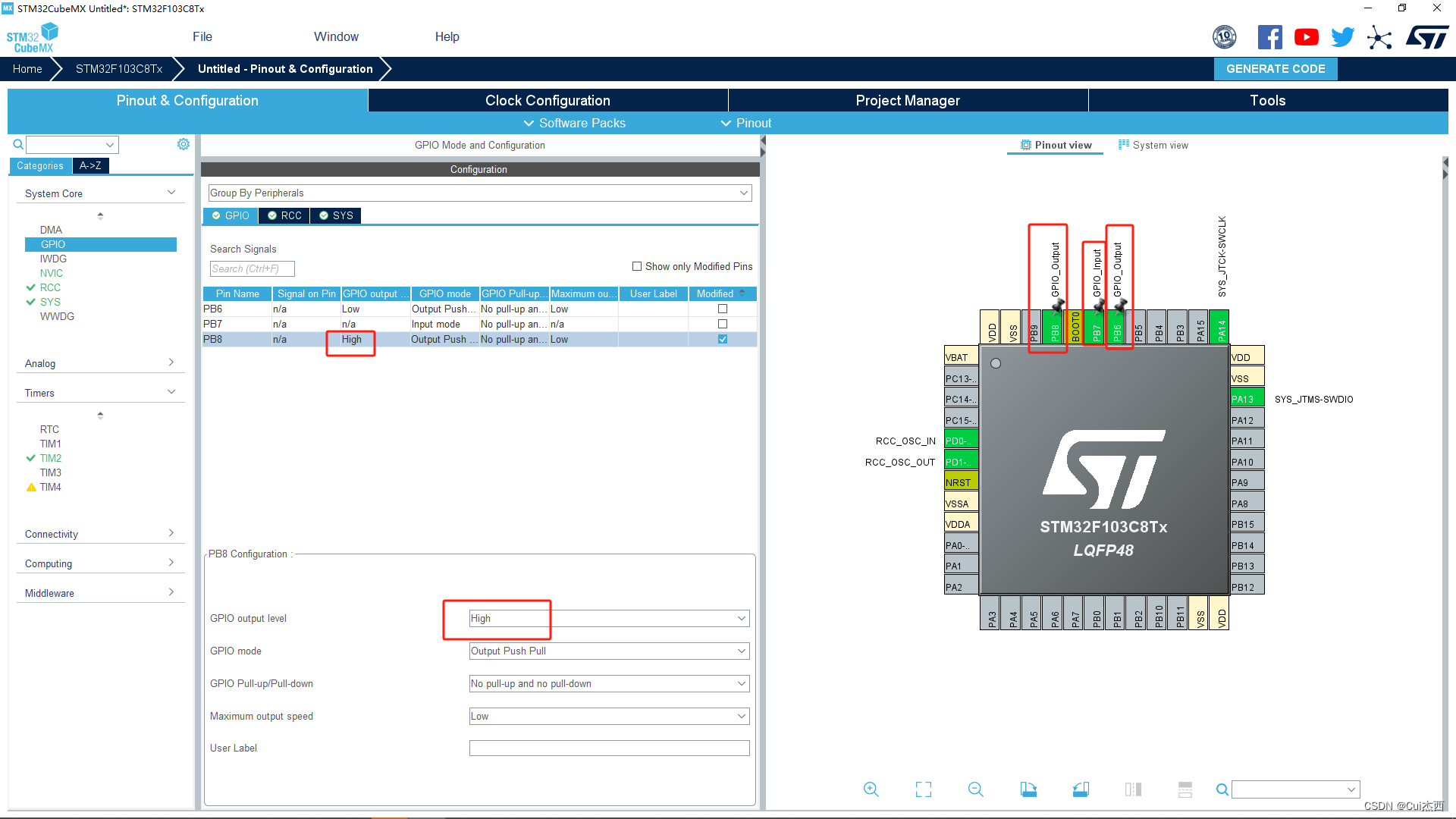
- LED1灯配置
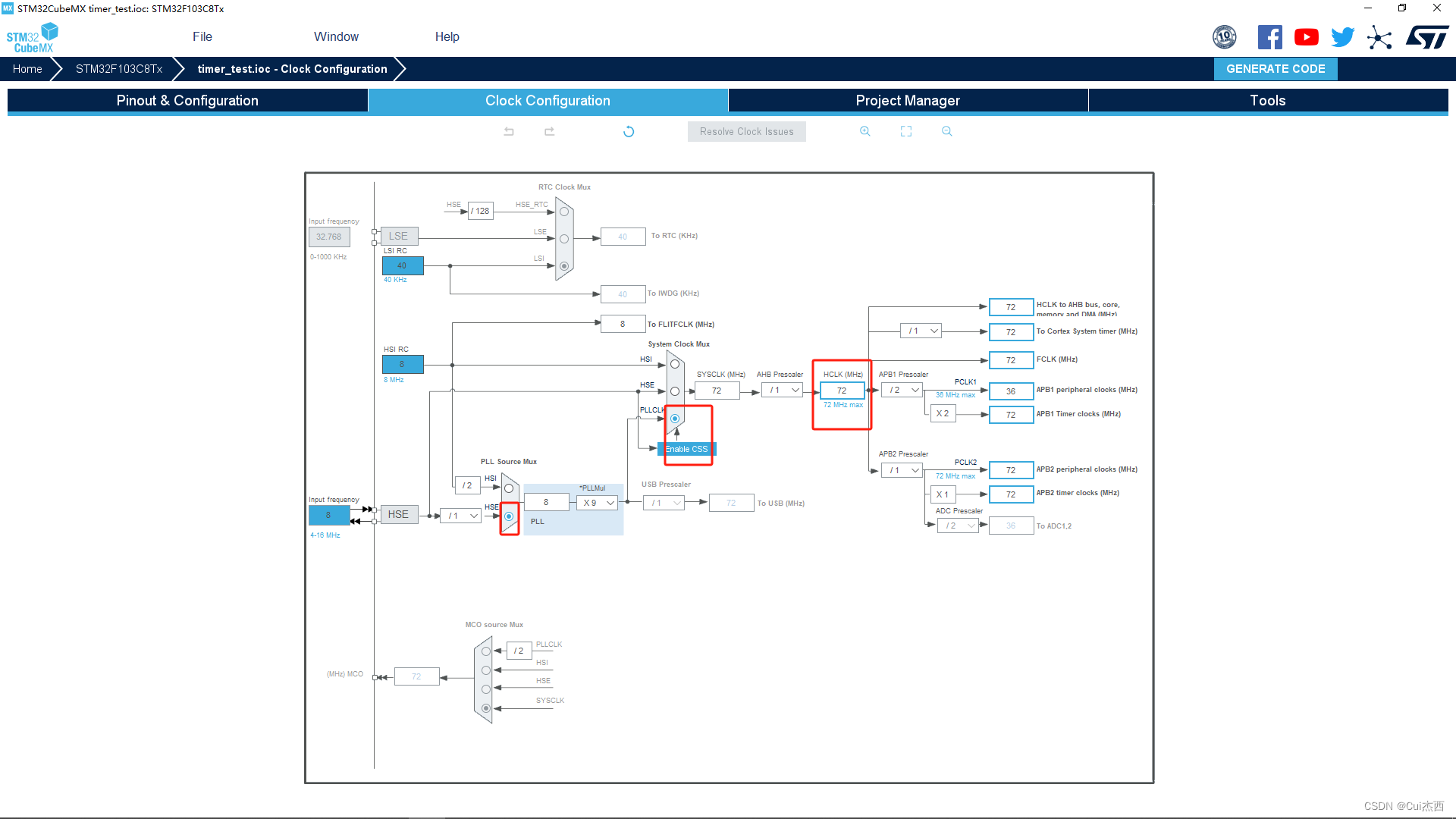
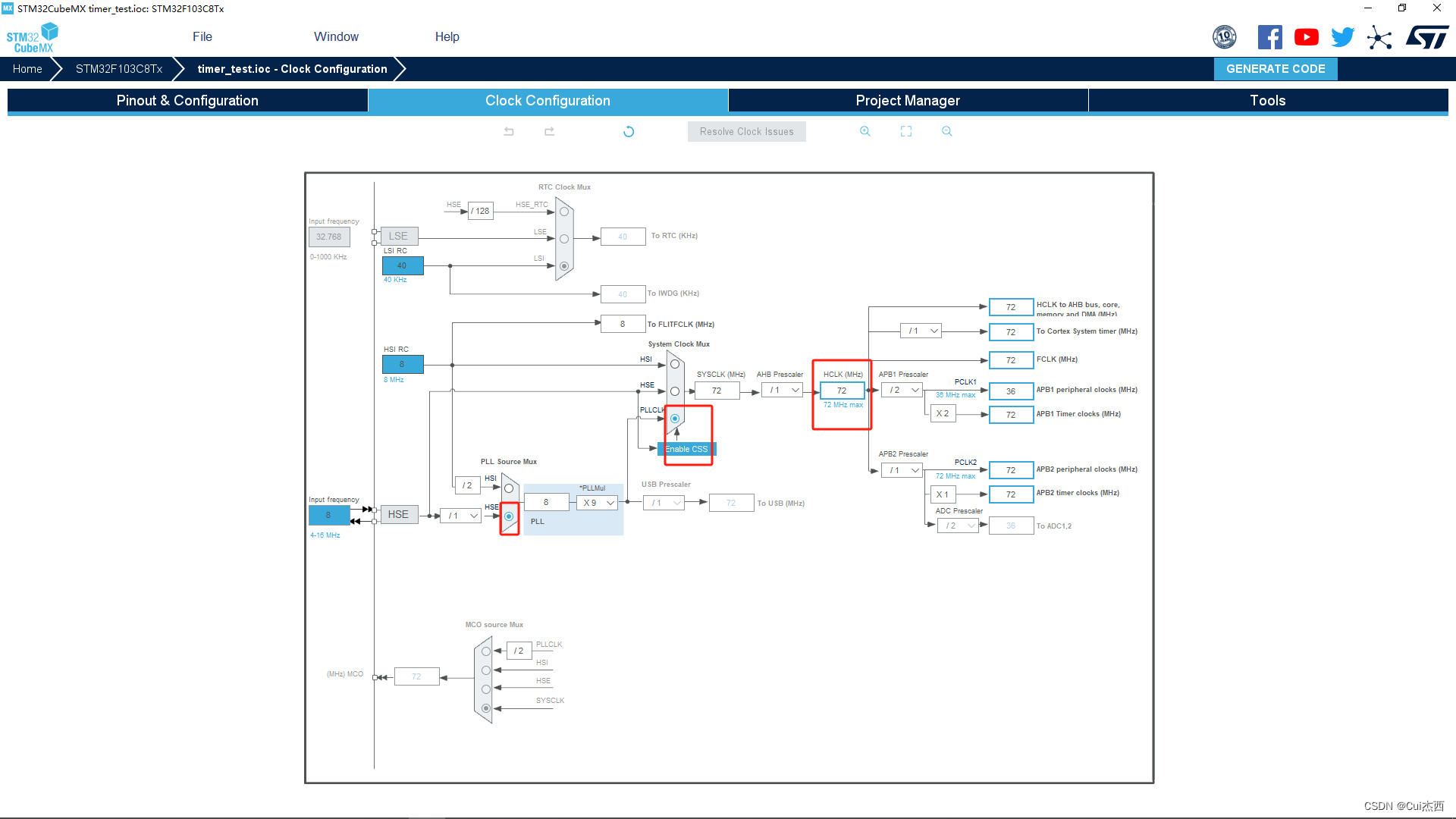
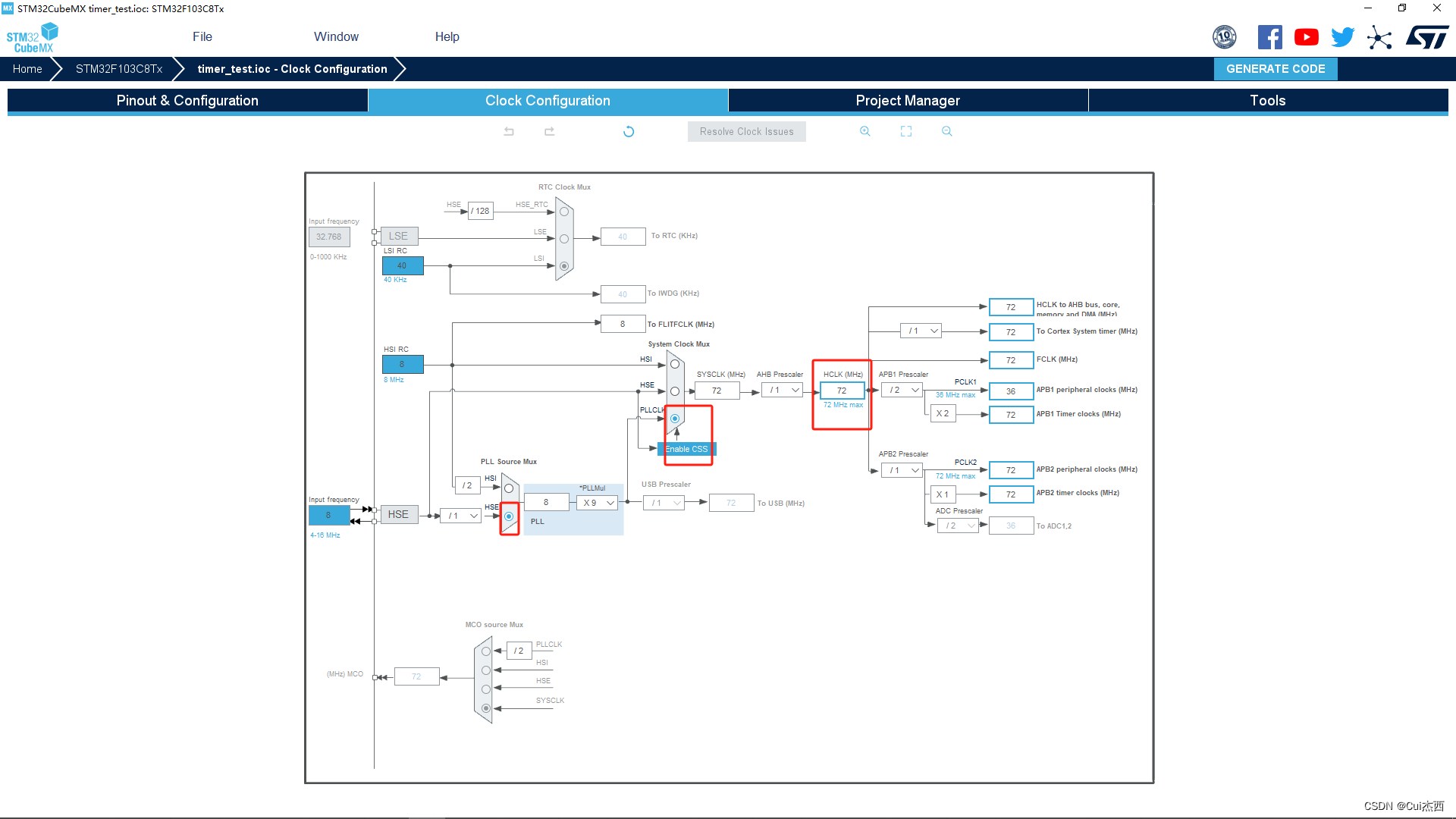
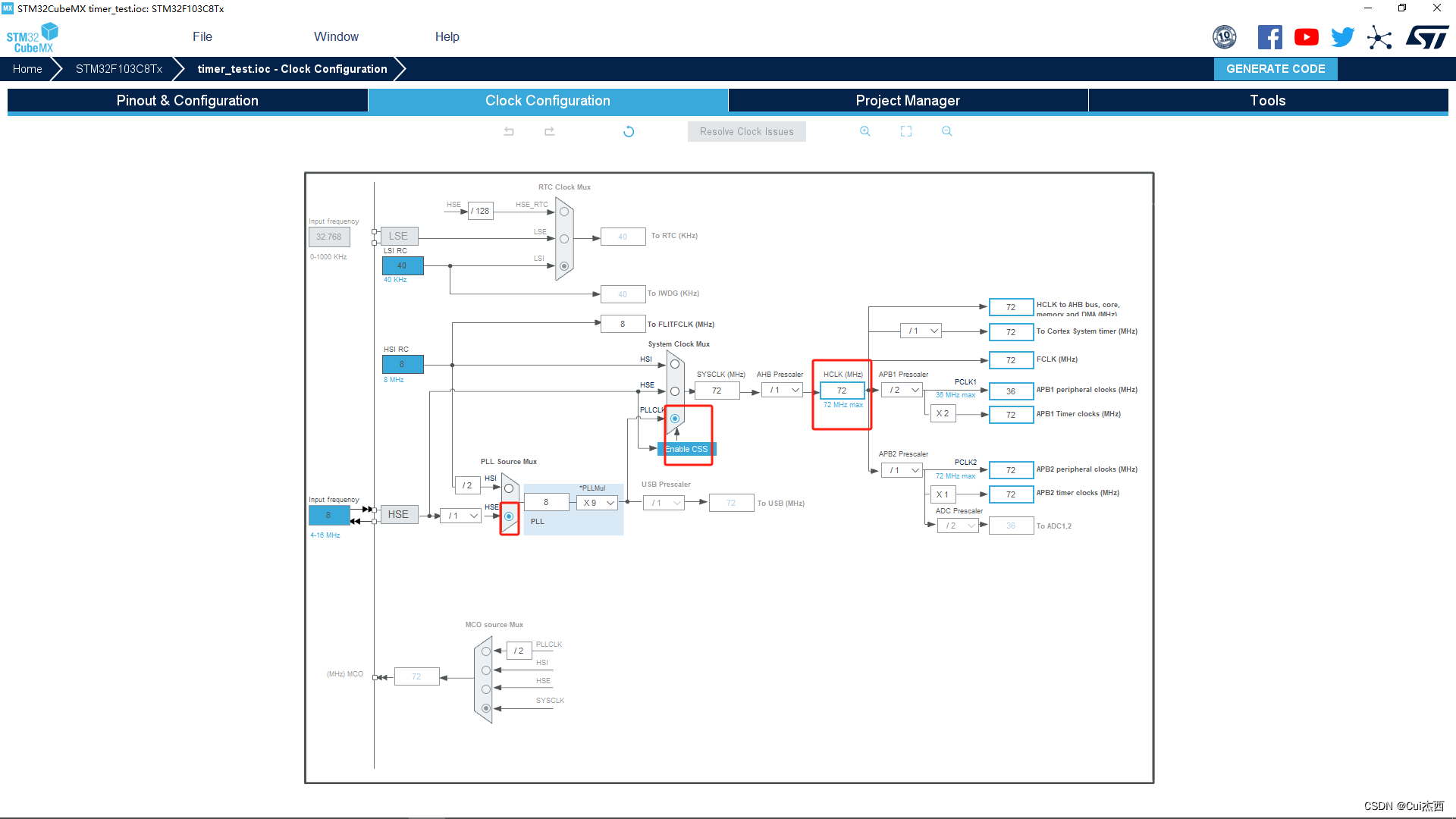
- 时钟数配置
- TIM2配置
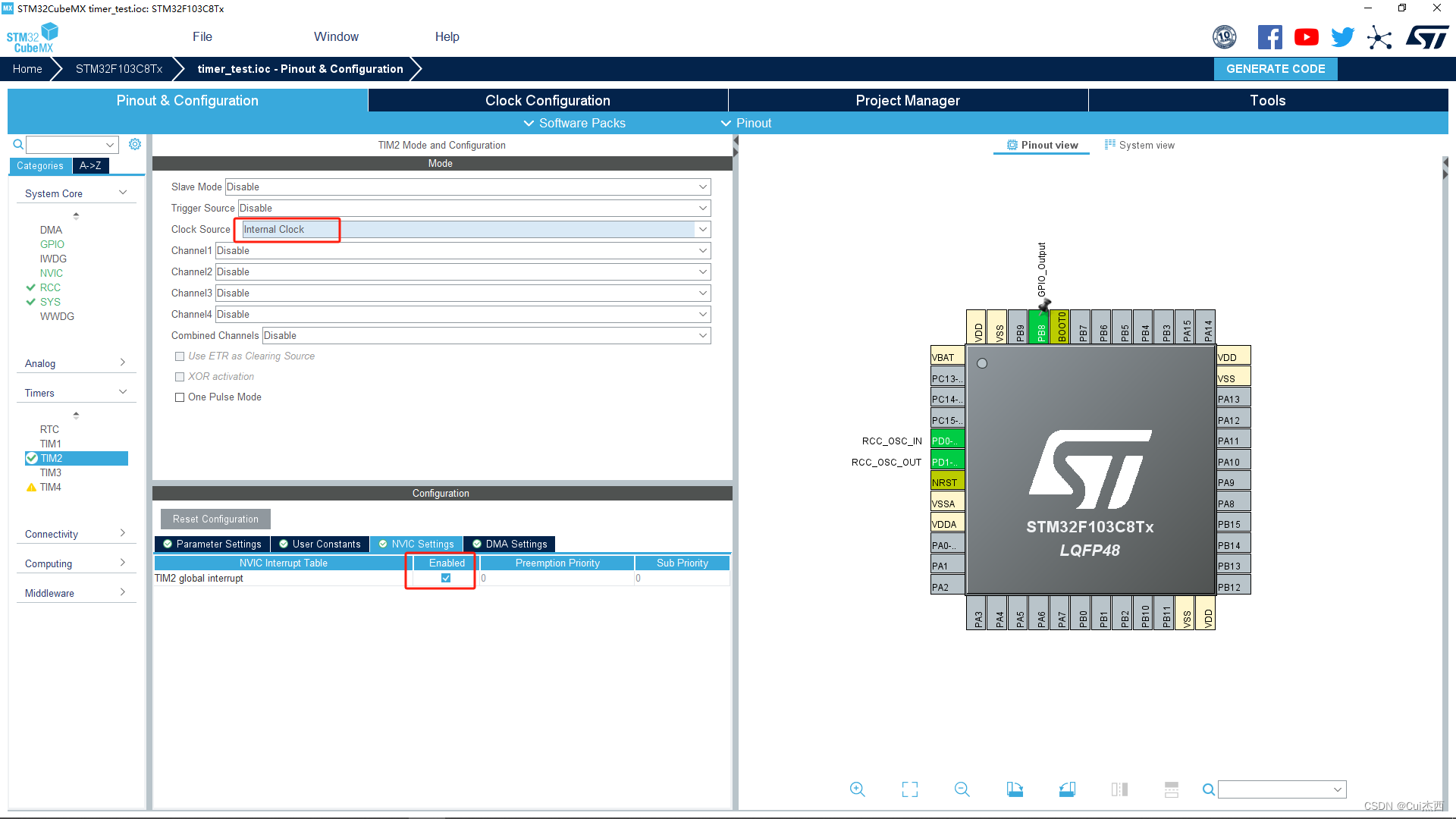
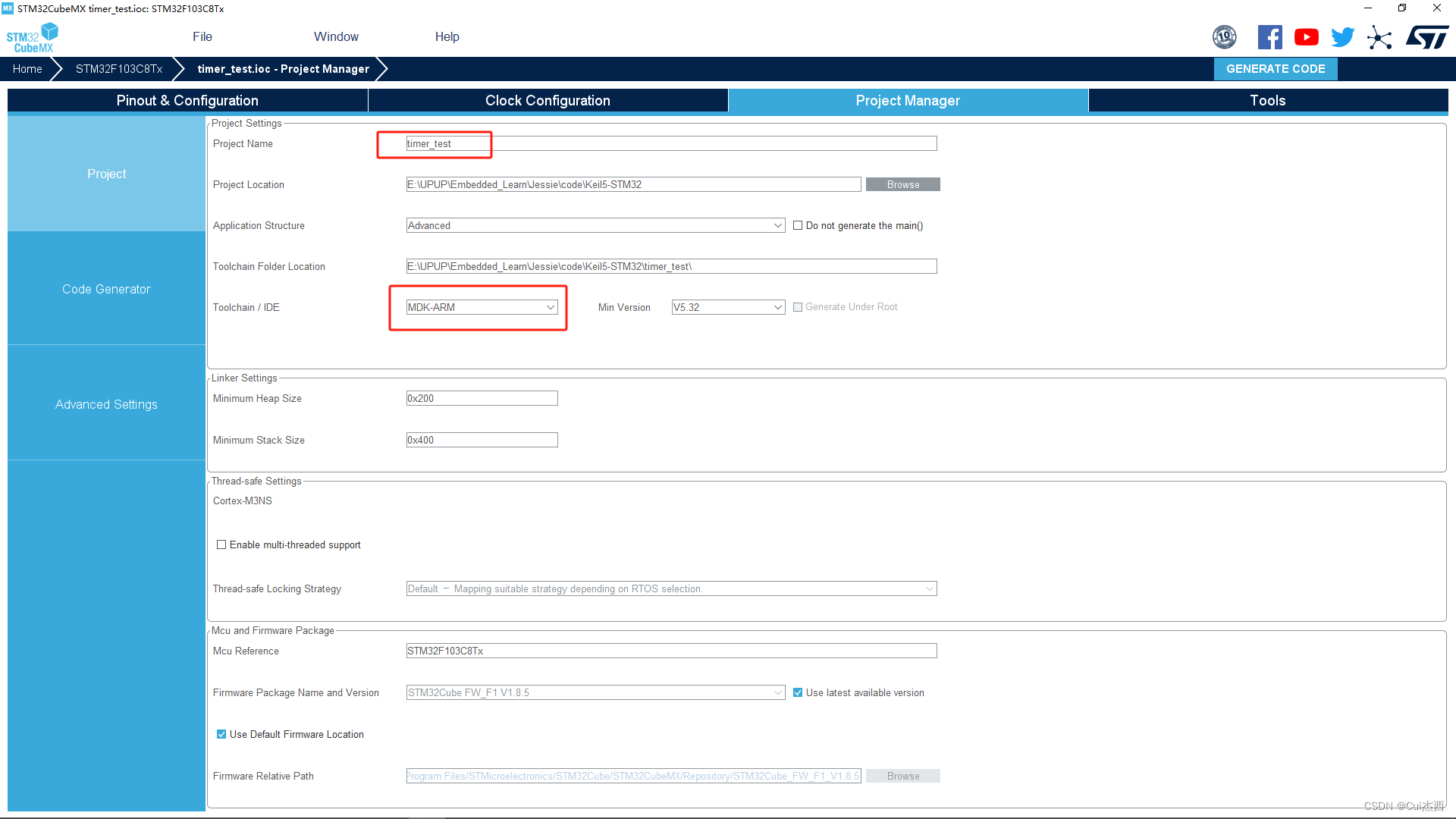

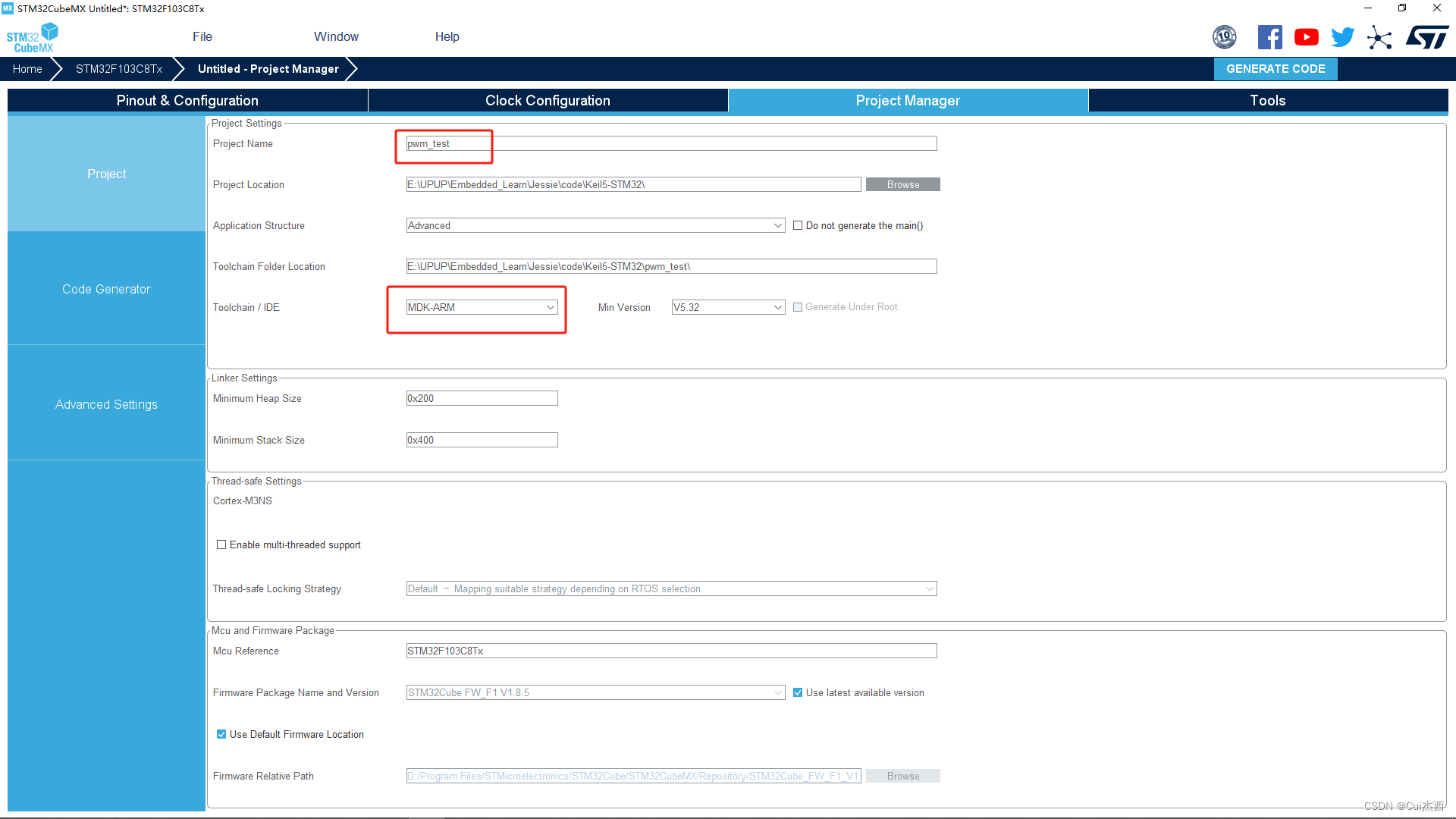
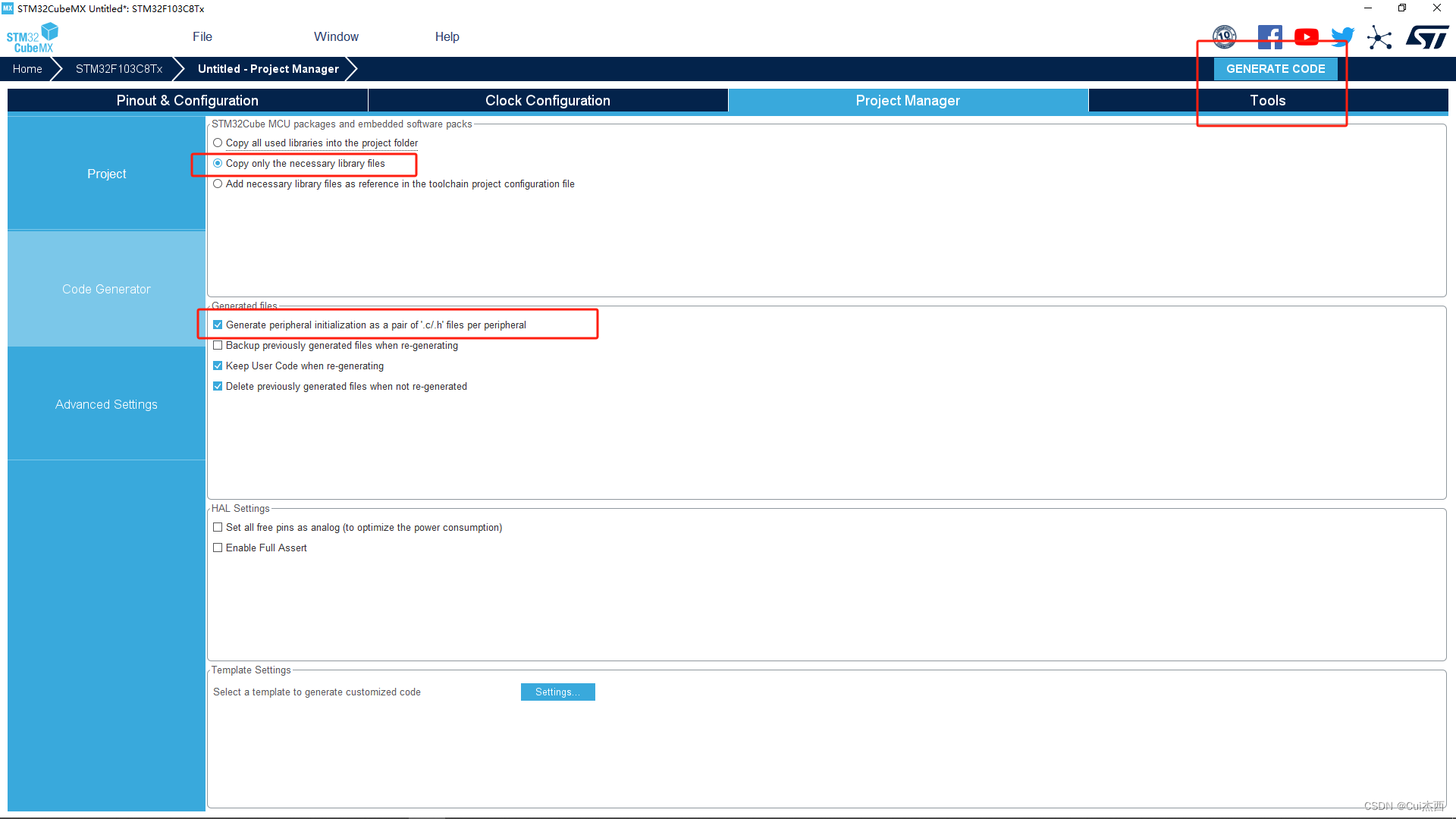
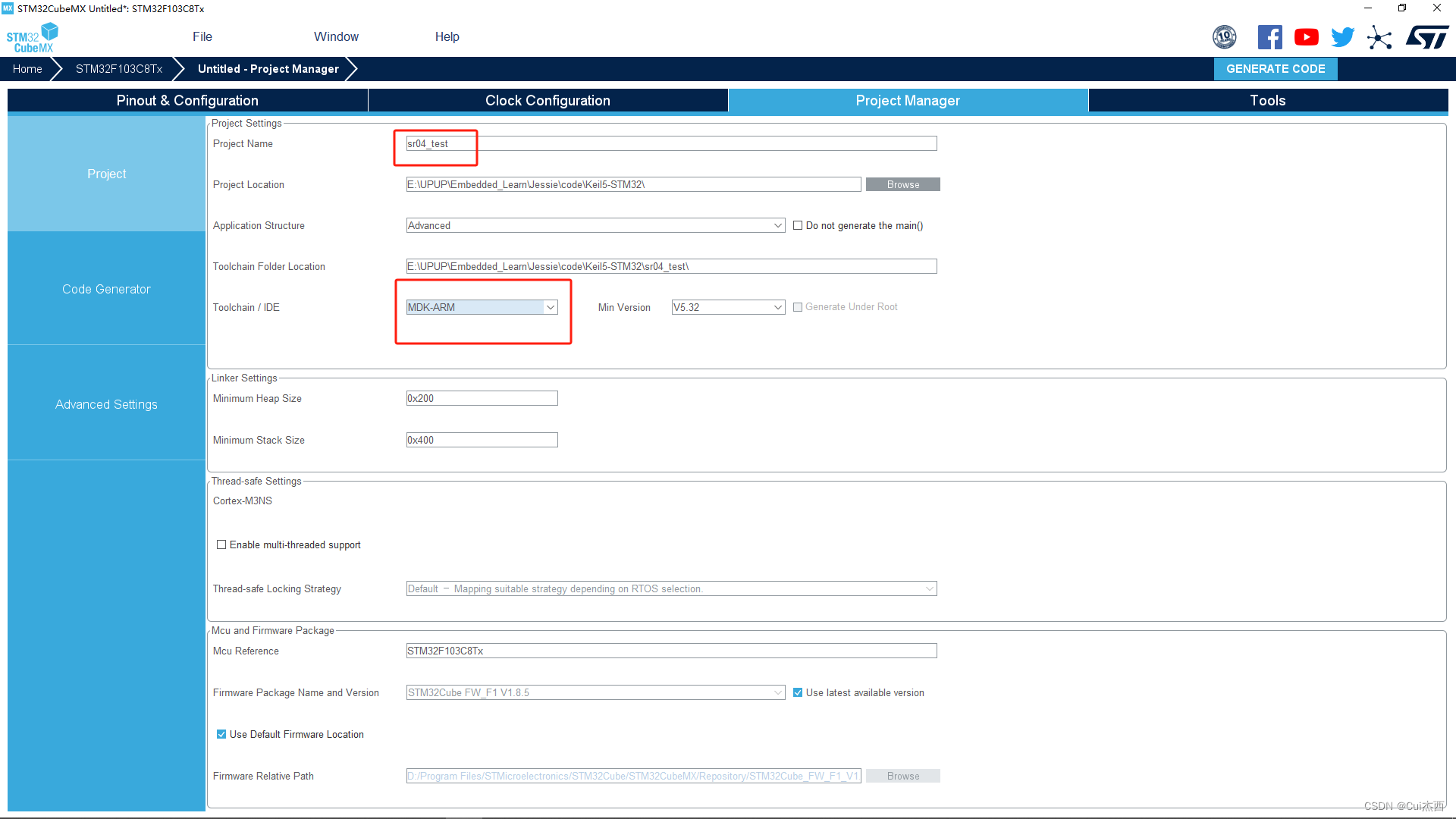
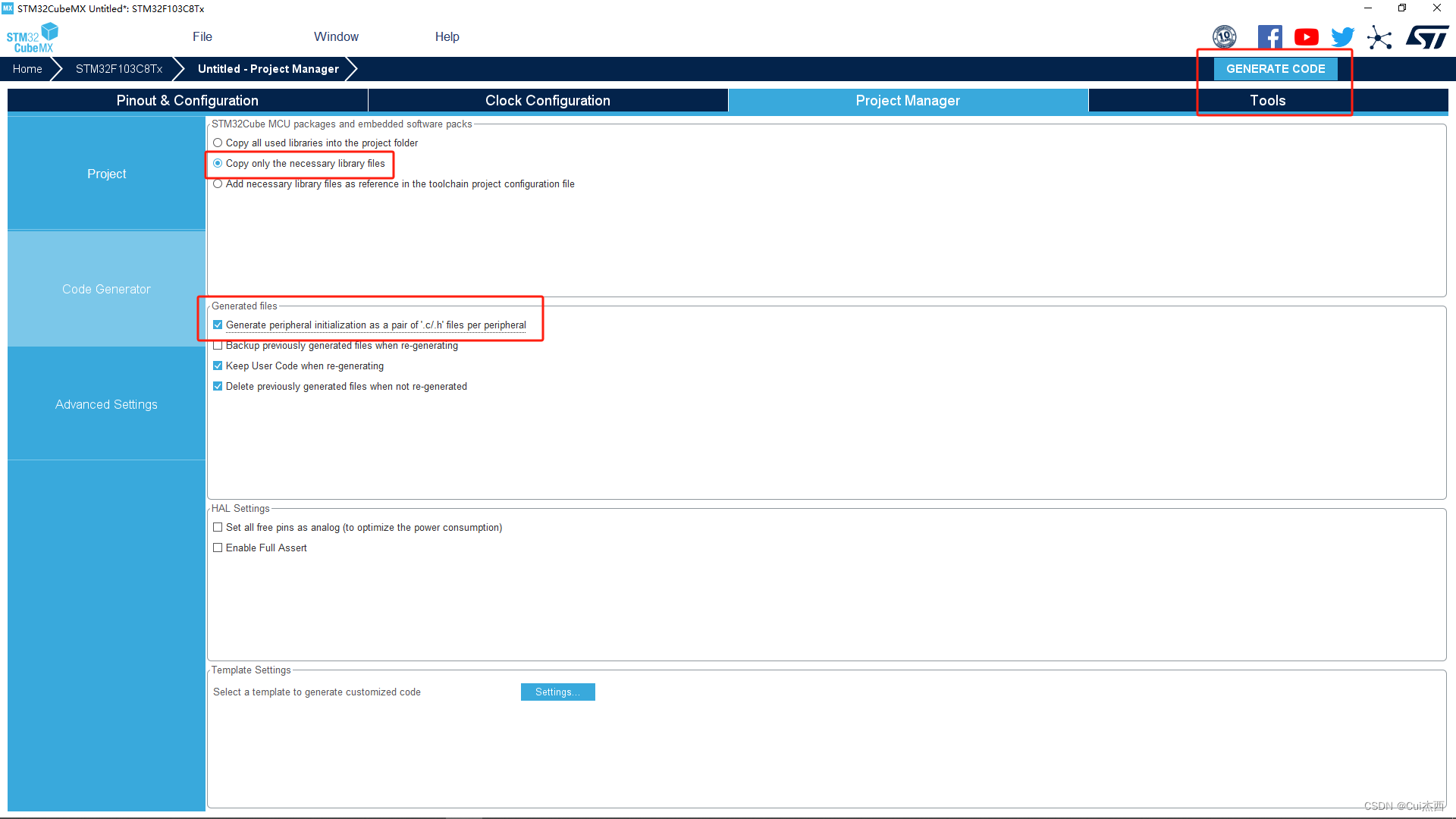
- 工程配置
- 重写更新中断回调函数
- 代码(6.timer_test/MDK-ARM)
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{//重写更新中断回调函数if(htim->Instance == TIM2)HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_8);//每过500ms翻转led1的状态
}
- 启动定时器
- 在main.c中,在定时器初始化命令之后加入以下代码:
HAL_TIM_Base_Start_IT(&htim2);
4. PWM概述(320.24)
STM32F103C8T6 PWM 资源:
- 高级定时器(TIM1):7路
- 通用定时器(TIM2~TIM4):各4路
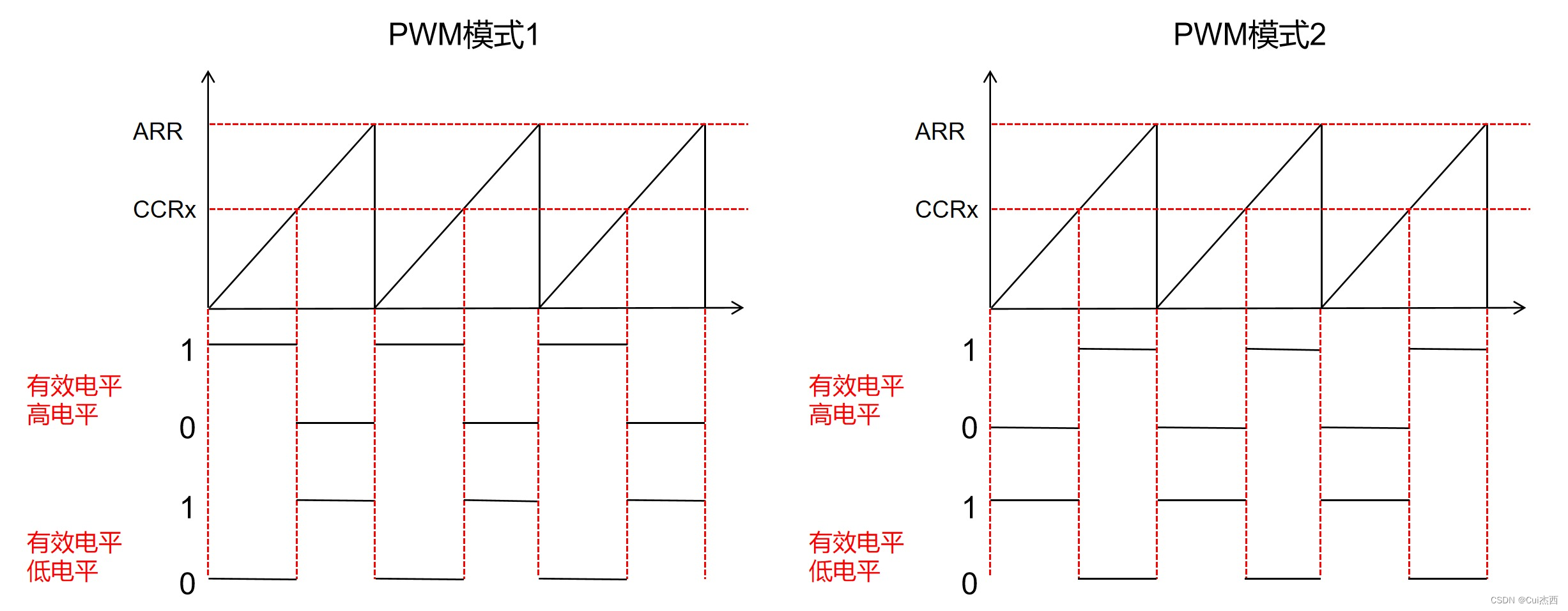
PWM 输出模式:
- PWM 模式1:在向上计数时,一旦 CNT < CCRx 时输出为有效电平,否则为无效电平; 在向下计数时,一旦 CNT > CCRx 时输出为无效电平,否则为有效电平。
- PWM 模式2:在向上计数时,一旦 CNT < CCRx 时输出为无效电平,否则为有效电平; 在向下计数时,一旦 CNT > CCRx 时输出为有效电平,否则为无效电平。
PWM 周期与频率:
PWM 占空比:
- 由 TIMx_CCRx 寄存器决定。
5. PWM实现呼吸灯效果(321.25)
- 需求:使用PWM点亮LED1实现呼吸灯效果。
LED灯为什么可以越来越亮,越来越暗?
- 这是由不同的占空比决定的。
如何计算周期/频率?
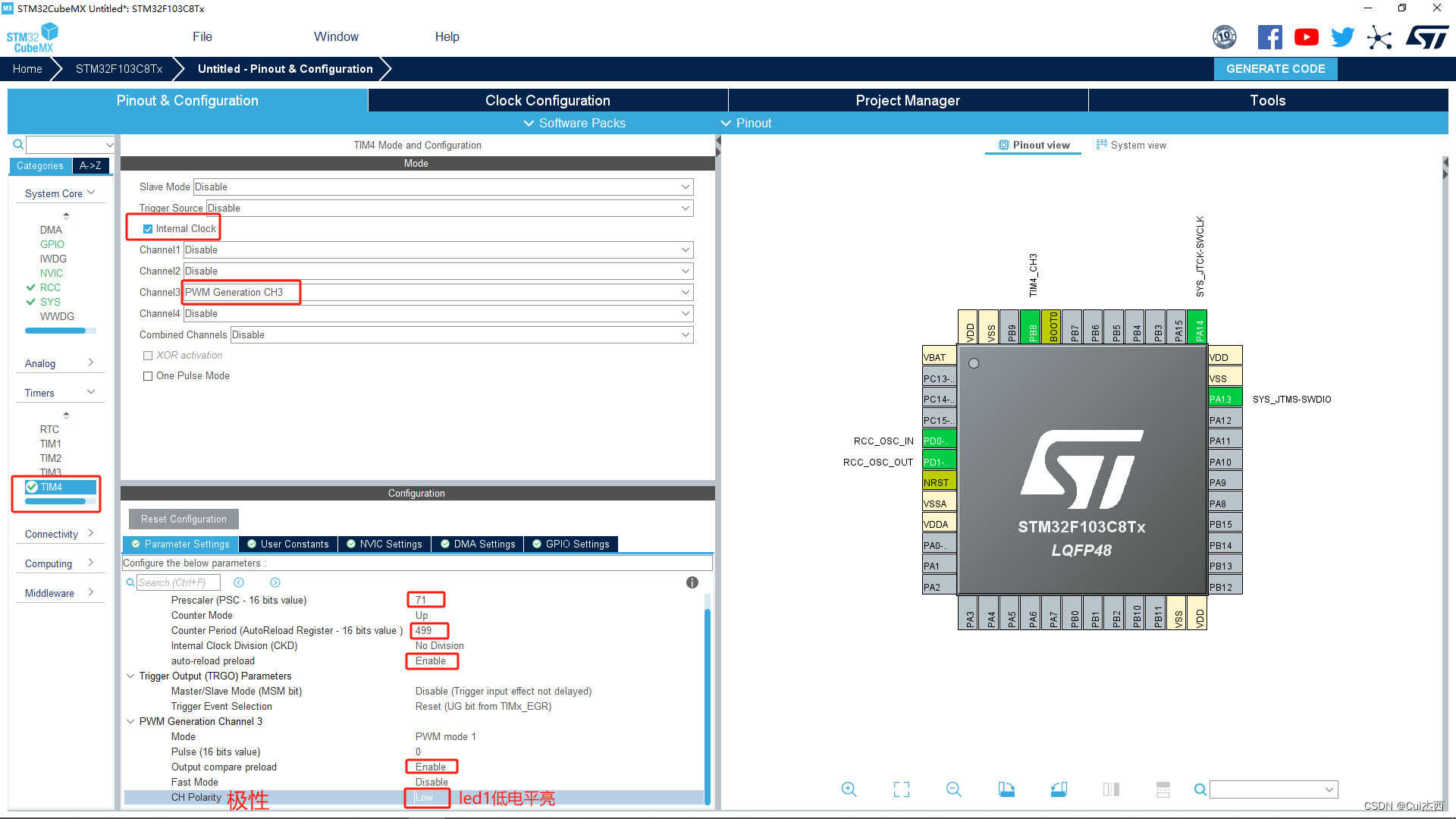
- 假如频率为 2kHz ,则:PSC=71,ARR=499
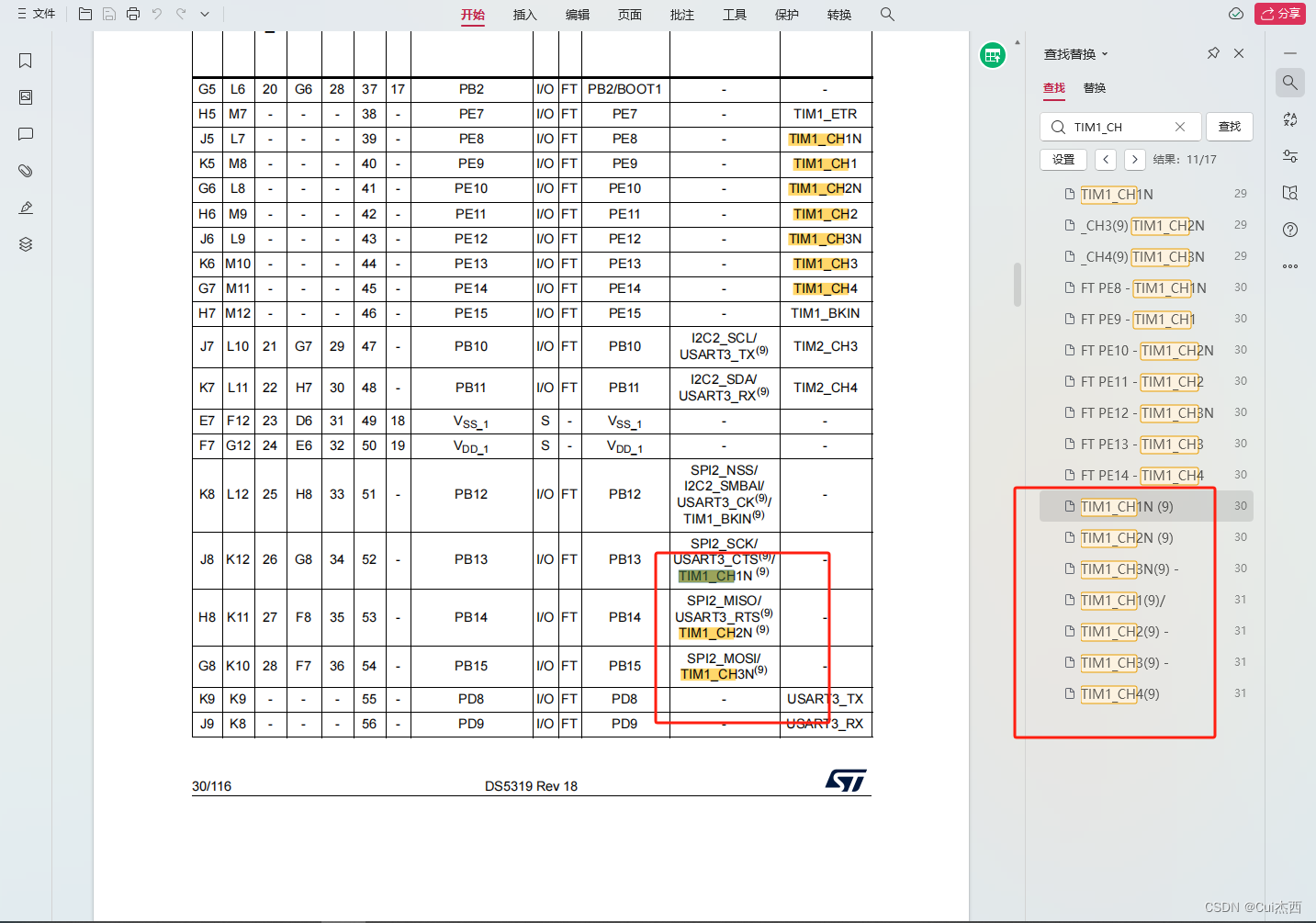
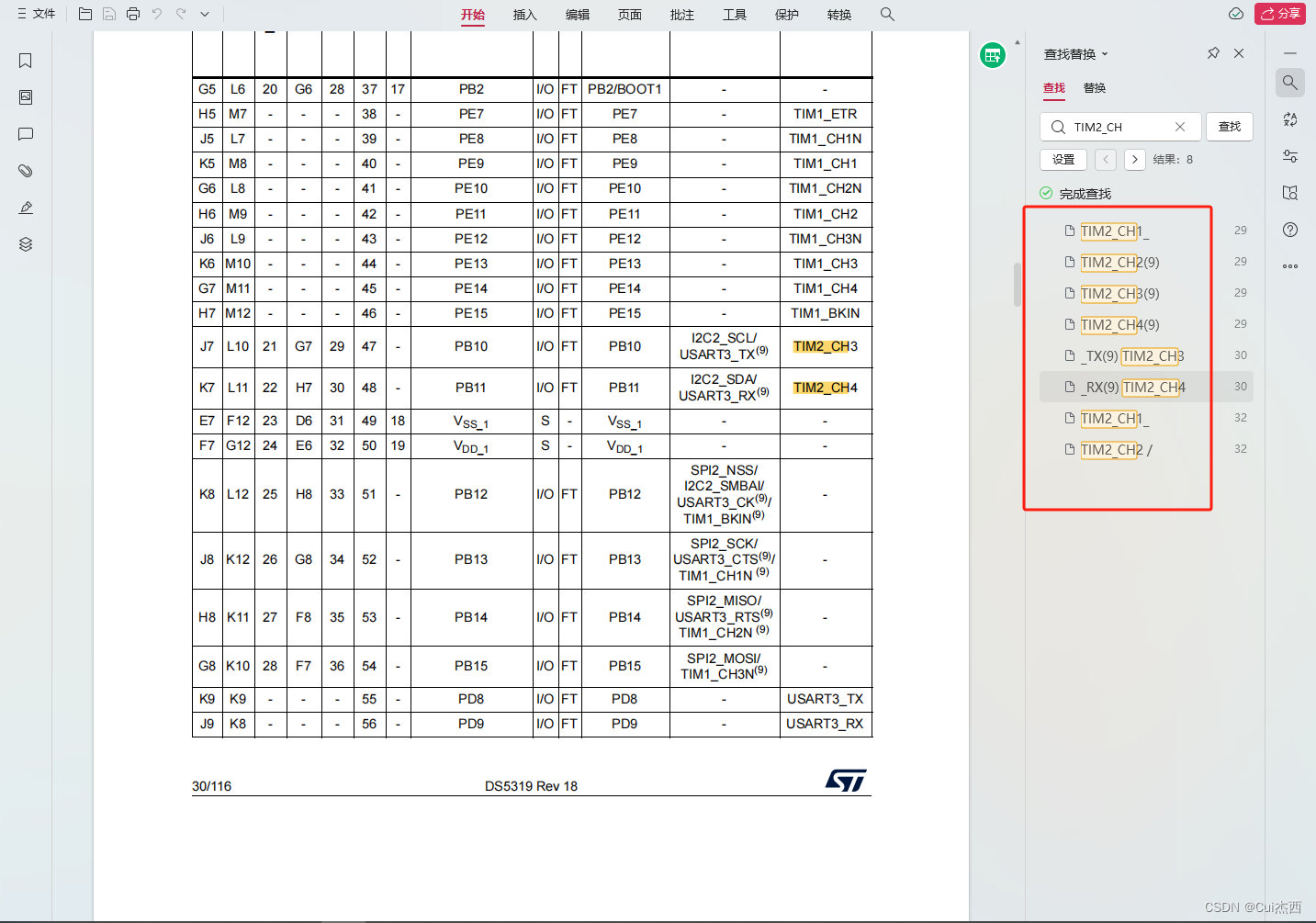
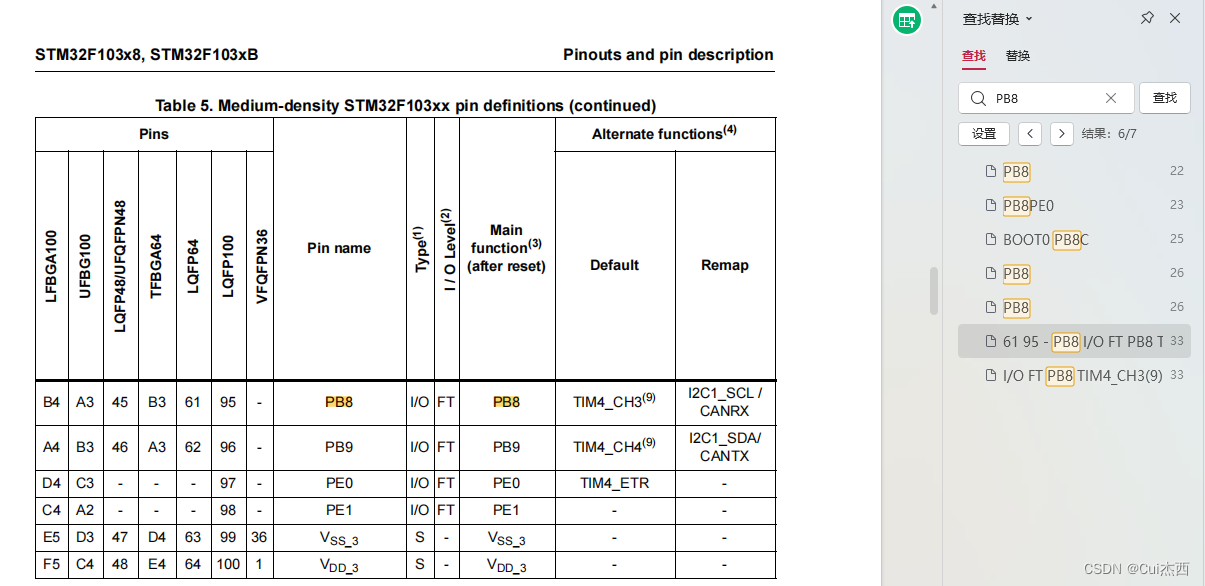
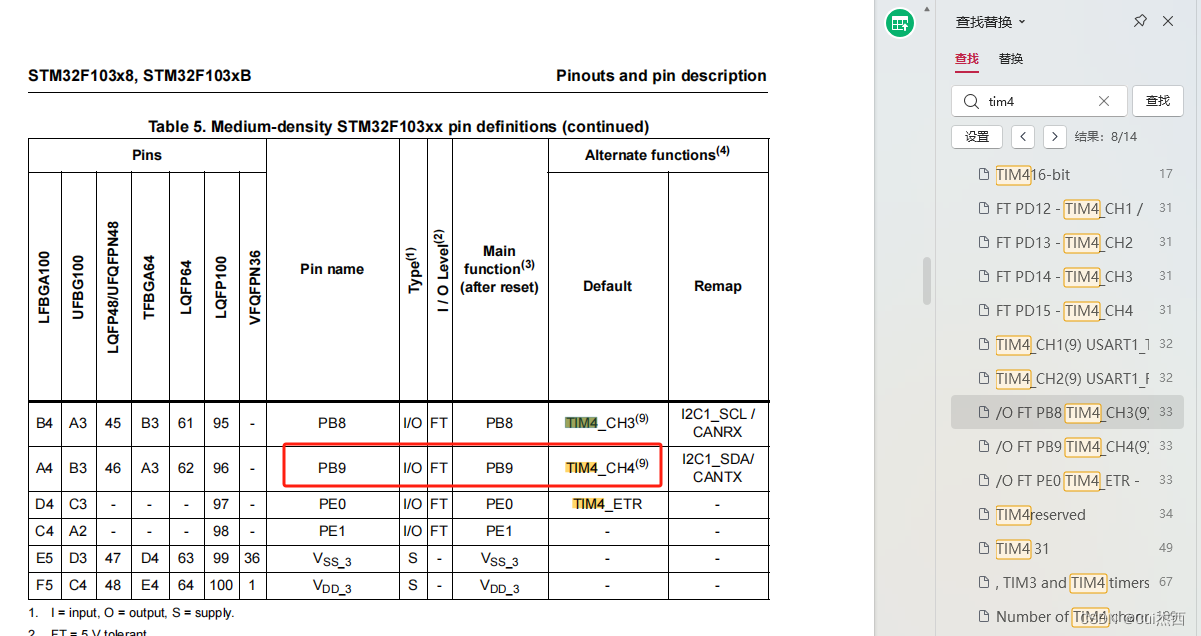
LED1连接到哪个定时器的哪一路?
- 学会看产品手册:
开始实战!
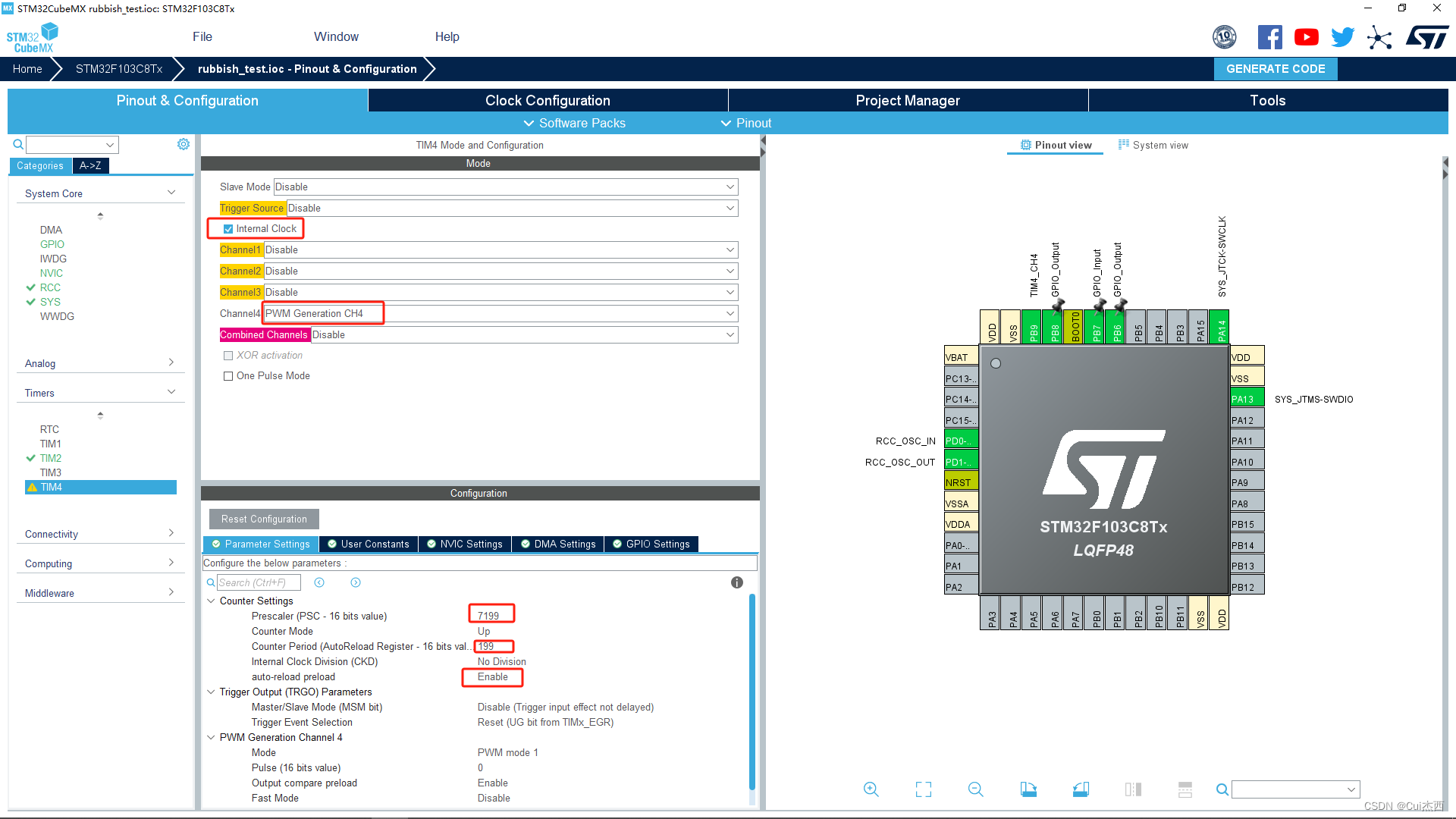
- 设置时钟
- 设置定时器
- 把极性设置为 Low,因为 LED 灯是低电平亮
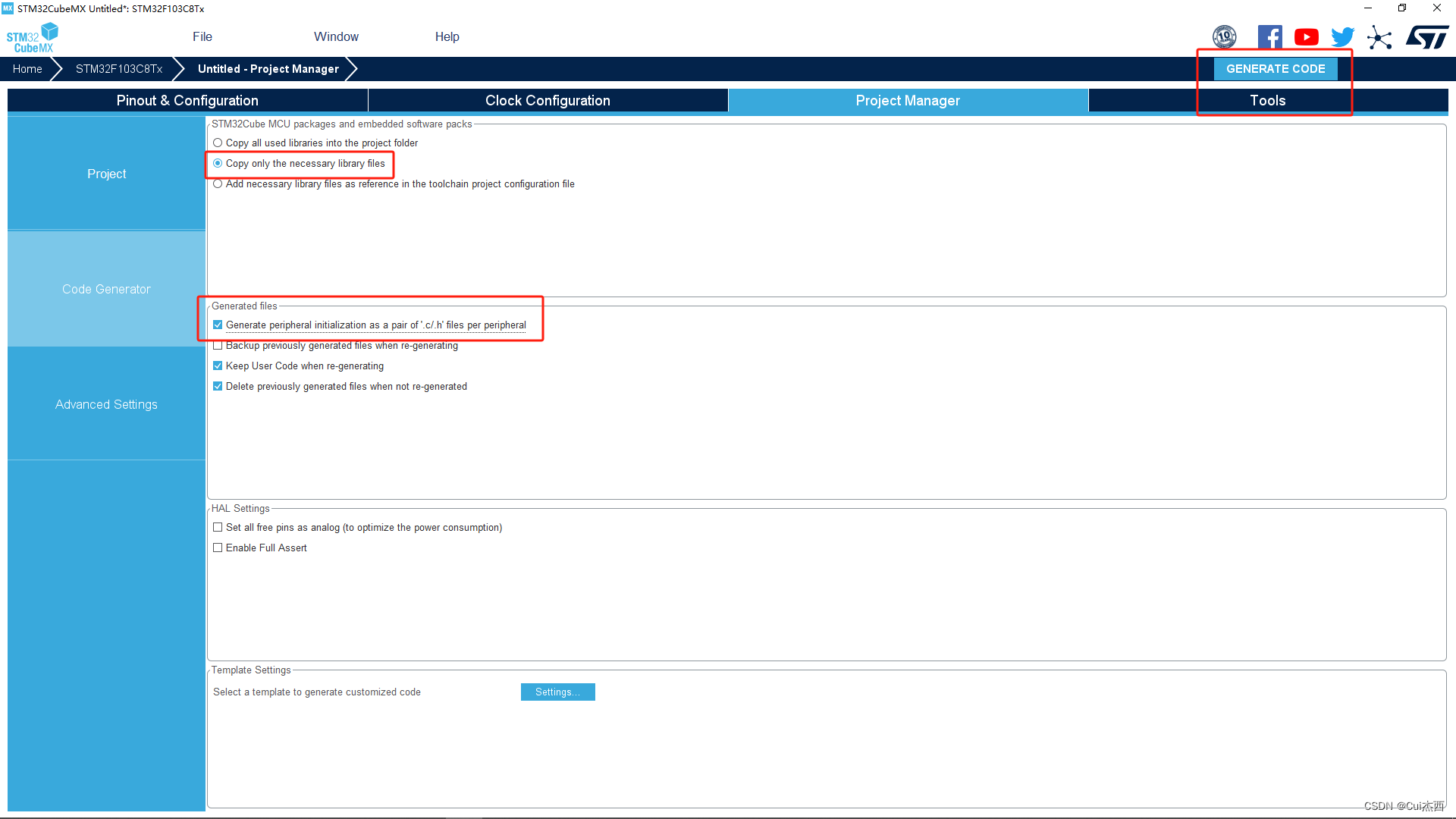
- 配置工程
- 业务代码
- 代码(7.pwm_test/MDK-ARM)
//main函数
// 定义变量
uint16_t pwmVal=0; //调整PWM占空比
uint8_t dir=1; //设置改变方向。1:占空比越来越大;0:占空比越来越小HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM4_Init();// 使能 Timer4 第3通道 PWM 输出
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);//打开pwm
// while循环实现呼吸灯效果
while (1)
{HAL_Delay(1);//如果没有 可能会不亮if (dir)pwmVal++;//1:越来越亮elsepwmVal--;//0:越来越暗//pwmVal 达到 PWM 周期时,就会反向改变方向if(pwmVal >= htim4.Init.Period)//越来越亮到顶端后dir = 0;//变为越来越暗else if (pwmVal <= 0)//越来越暗到底端后dir = 1;//变为越来越亮//修改比较值(CCRx)即修改占空比__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal);
}
6. 感应开关盖垃圾桶项目概述(322.26)
项目需求
- 检测靠近时,垃圾桶自动开盖并伴随滴一声,2 秒后关盖
- 发生震动时,垃圾桶自动开盖并伴随滴一声,2 秒后关盖
- 按下按键时,垃圾桶自动开盖并伴随滴一声,2 秒后关盖
项目框图
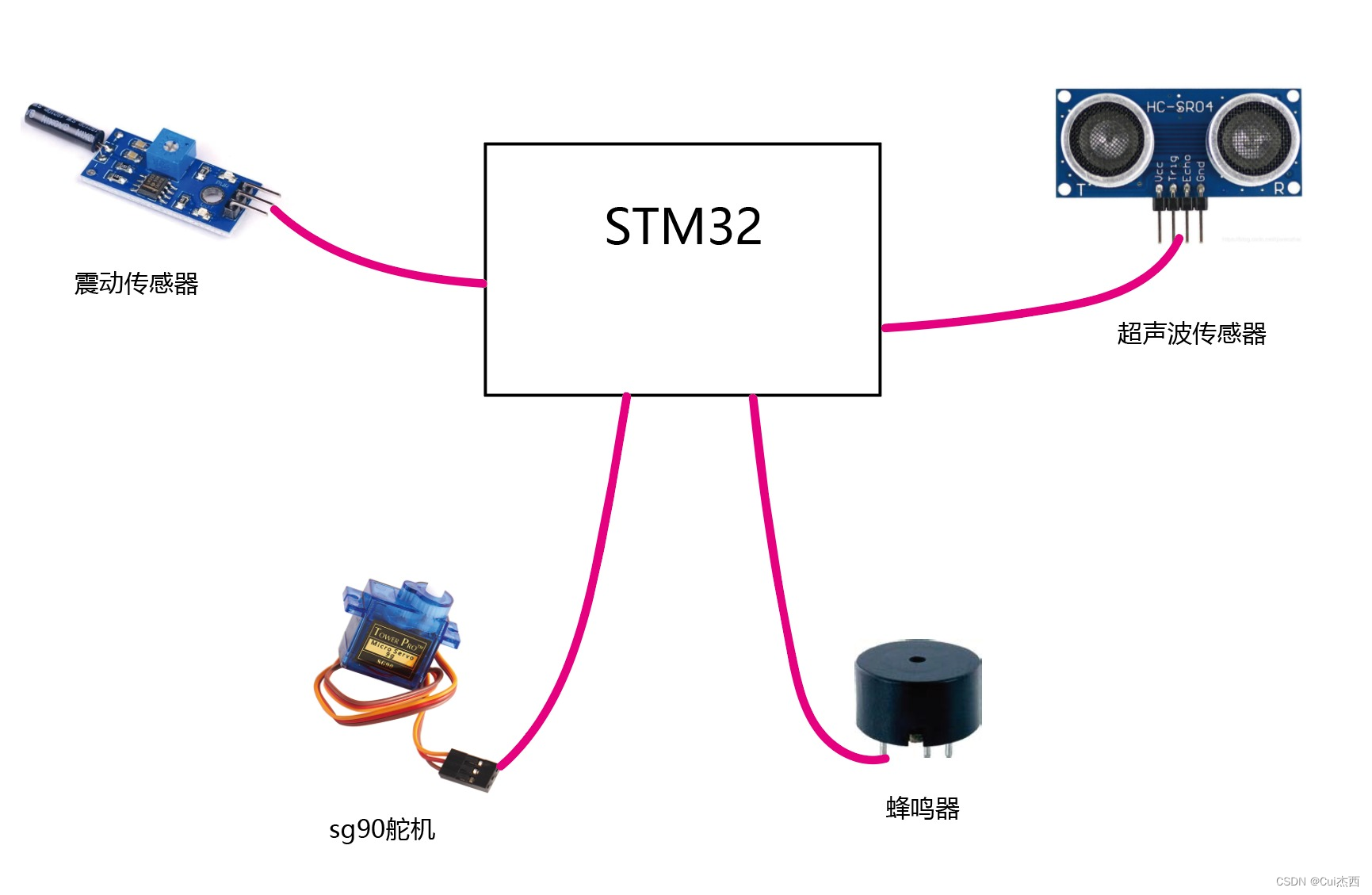
硬件清单
- SG90舵机,超声波模块,震动传感器,蜂鸣器
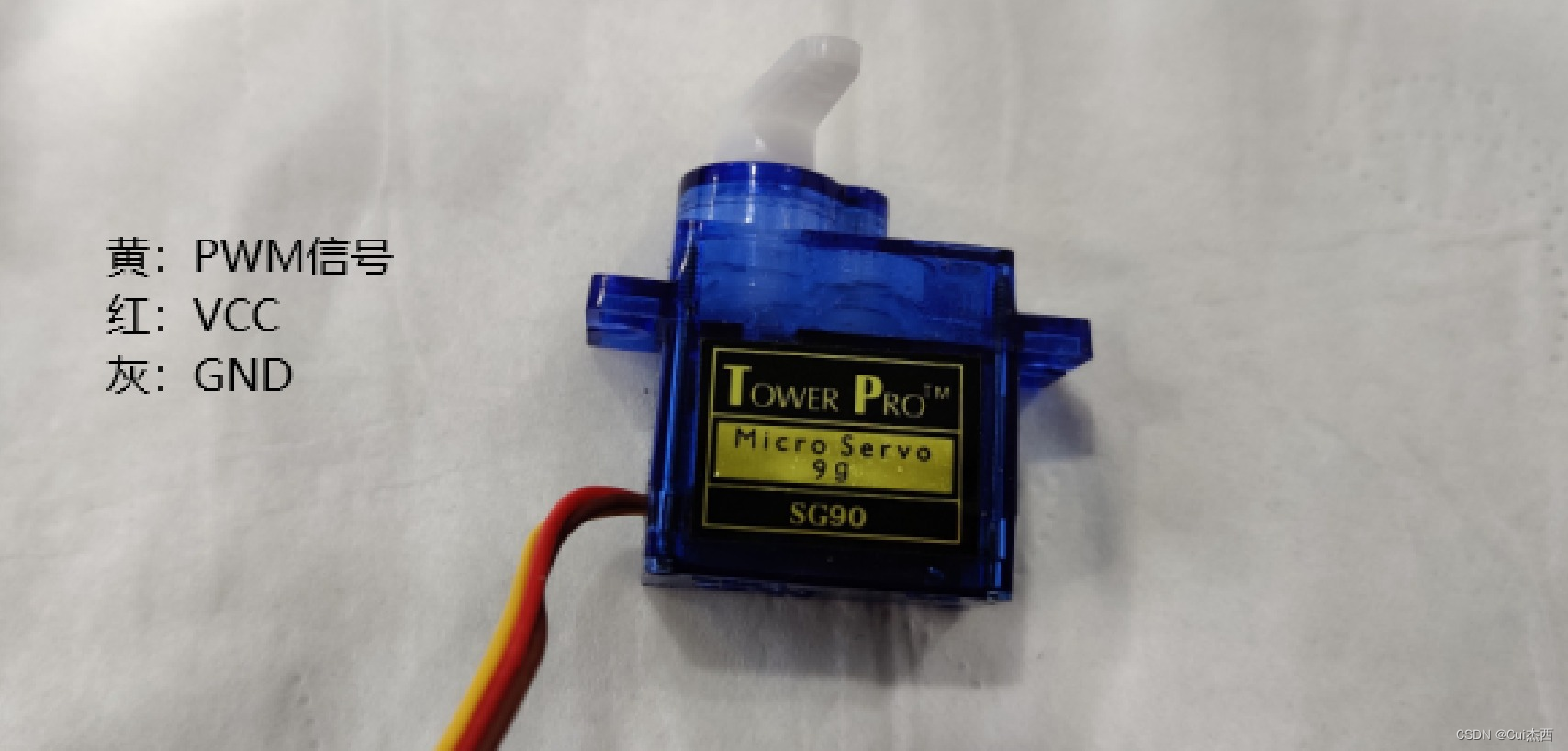
7. sg90舵机概述(324.28)
sg90舵机介绍
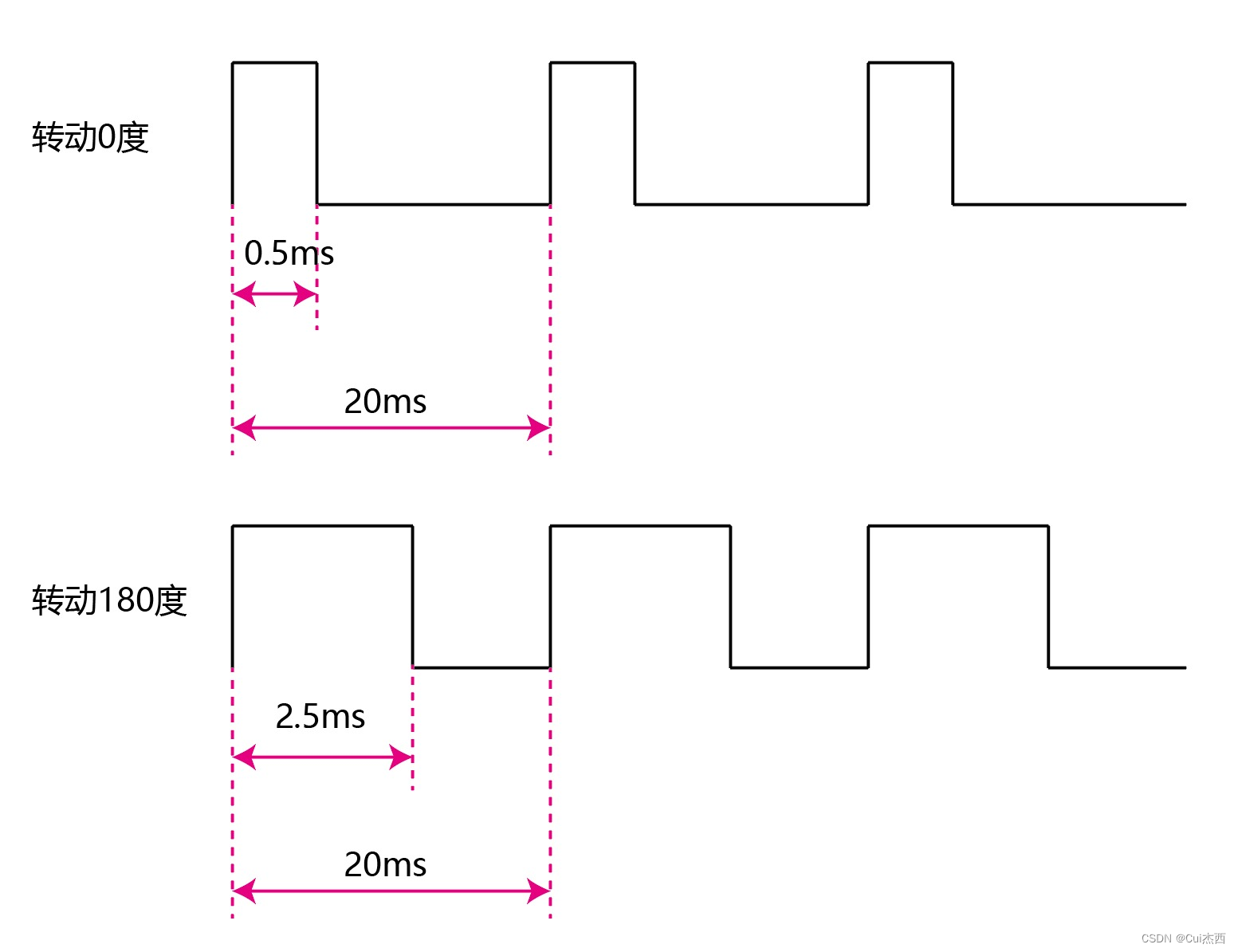
- PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右。
确定周期/频率
- 如果周期为20ms,则 PSC=7199,ARR=199
角度控制
- 0.5ms-------------0度;2.5% 对应函数中 CCRx 为 5
- 1.0ms------------45度;5.0% 对应函数中 CCRx 为 10
- 1.5ms------------90度;7.5% 对应函数中 CCRx 为 15
- 2.0ms-----------135度;10.0% 对应函数中 CCRx 为 20
- 2.5ms-----------180度;12.5% 对应函数中 CCRx 为 25
8. sg90舵机编程实战(323.27)
- 需求: 每隔1s,转动一个角度:0度 --> 45度 --> 90度 --> 135度 --> 180度 --> 0度
- 接线:
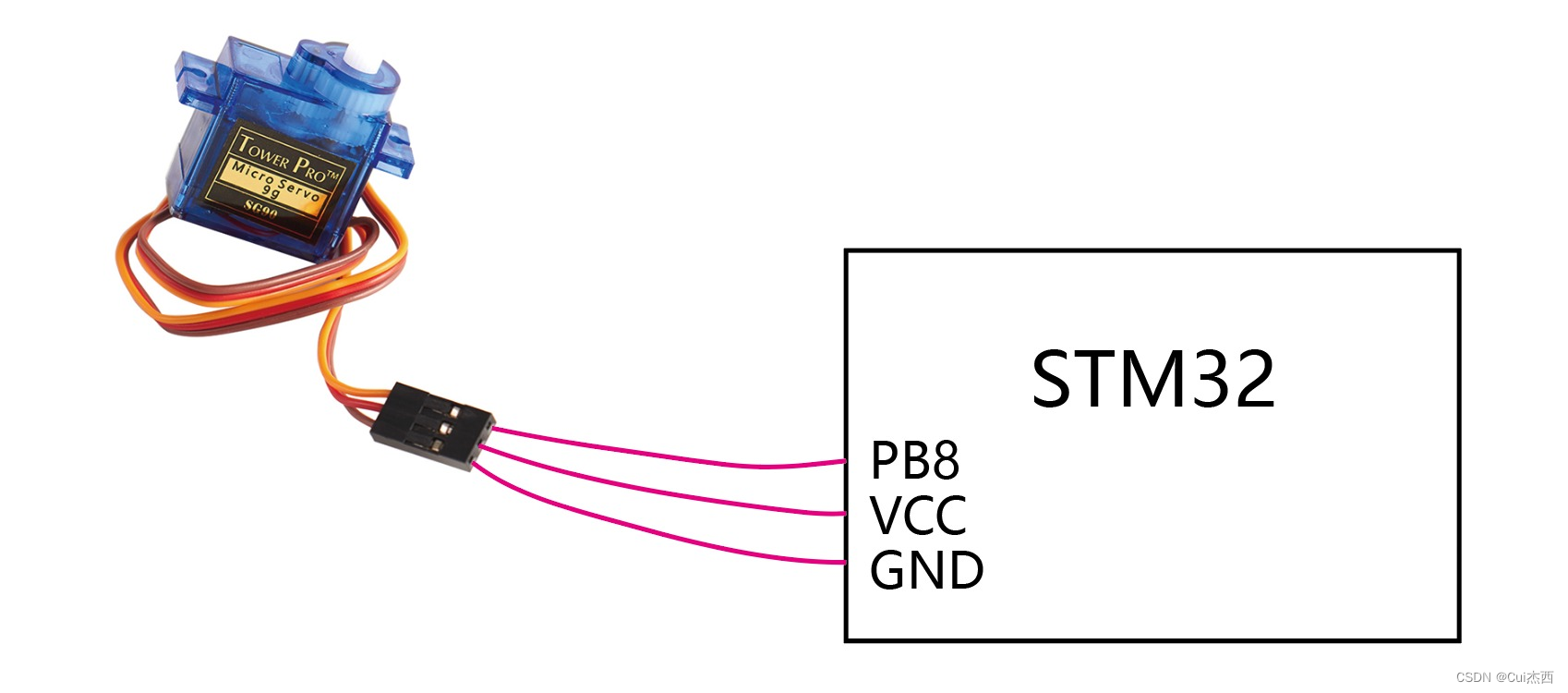
- STM32CubeMx工程配置
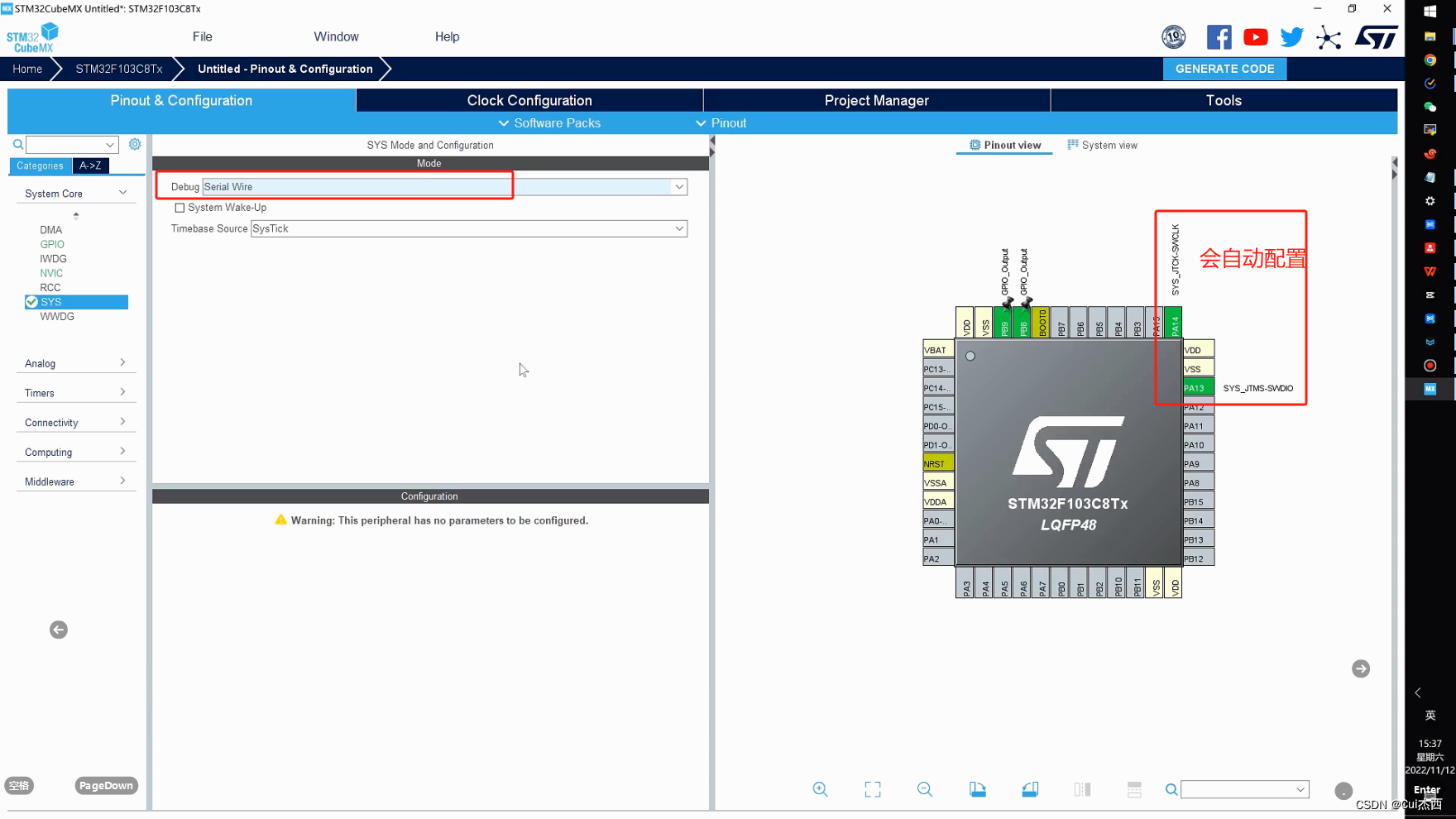

- 代码(8.sg90_test/MDK-ARM)
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);//打开Time4 第3通道的 PWMwhile (1)
{HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 10);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 15);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 25);
}
9. 超声波传感器介绍及实战(325.29)
超声波传感器介绍

-
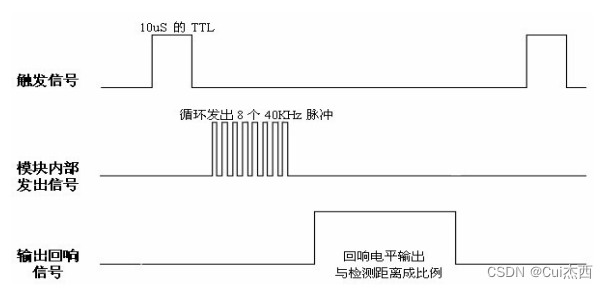
怎么让它发送波
- Trig ,给Trig端口至少10us的高电平
-
怎么知道它开始发送了
- Echo信号,由低电平跳转到高电平,表示开始发送波
-
怎么知道接收了返回波
- Echo,由高电平跳转回低电平,表示波回来了
-
怎么算时间
Echo引脚维持高电平的时间!- 波发出去的那一刻,开始启动定时器;
- 波返回来的拿一刻,开始停止定时器;
计算出中间经过多少时间。
-
怎么算距离
- 距离 = 速度 (340m/s)* 时间/2
- 距离 = 速度 (340m/s)* 时间/2
编程实战
- 需求: 使用超声波测距,当手离传感器距离小于5cm时,LED1点亮,否则保持不亮状态。
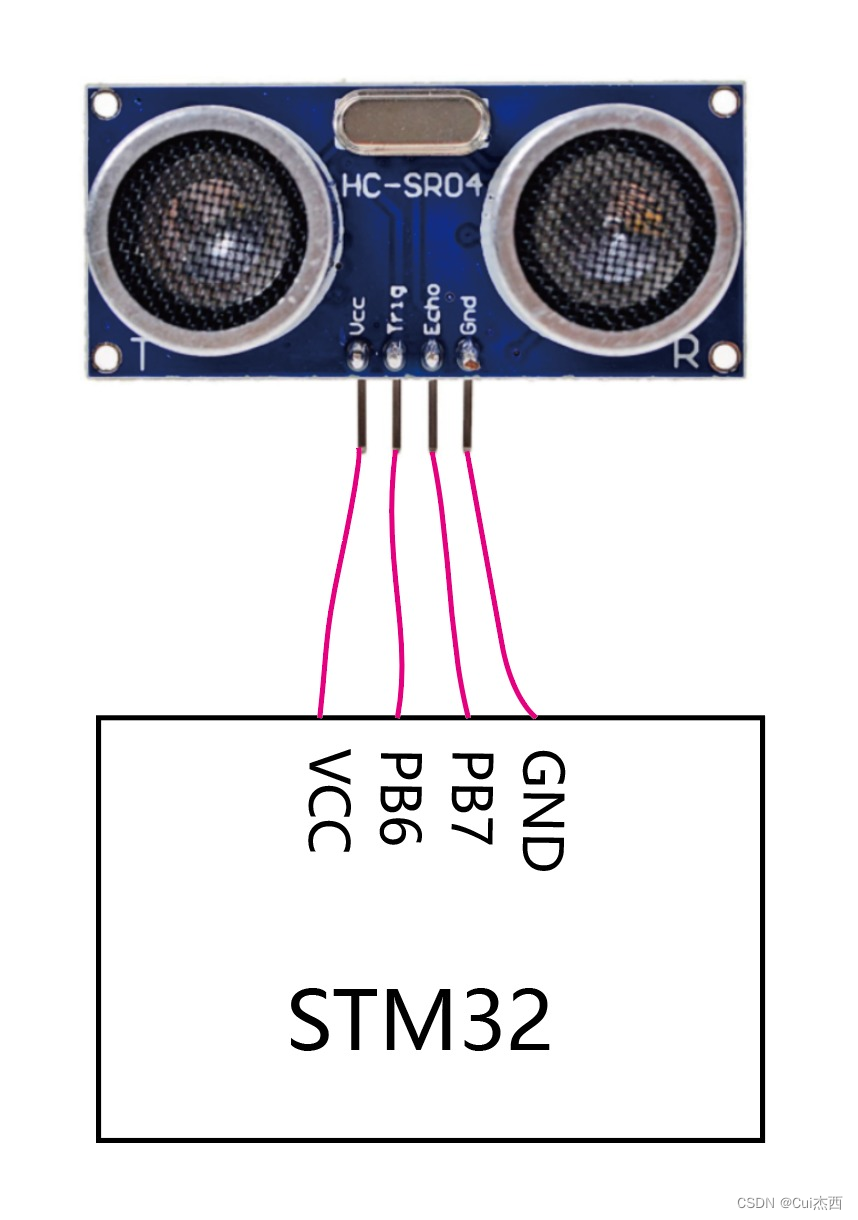
- 接线:
- Trig — PB6
- Echo — PB7
- LED1 — PB8
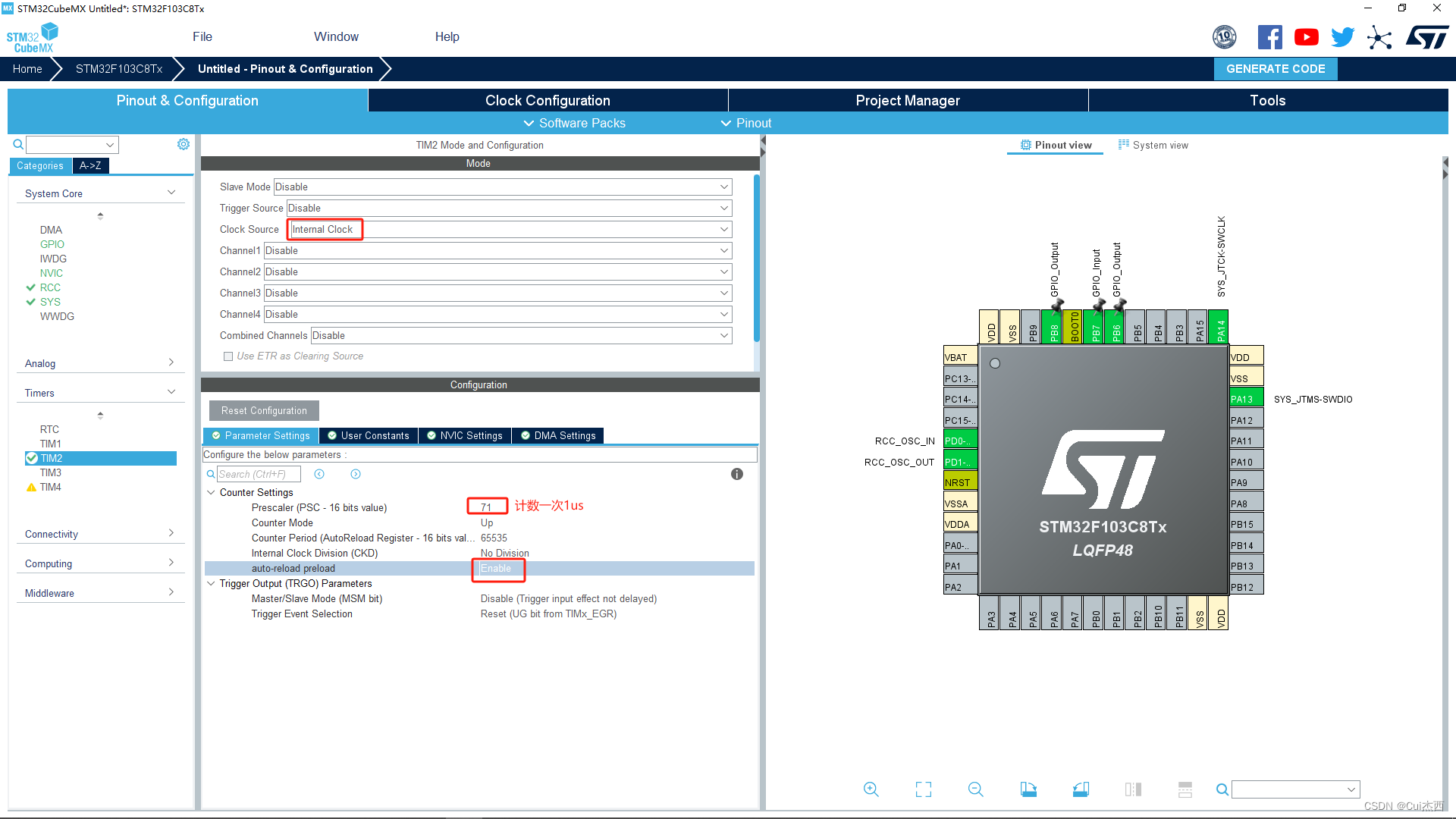
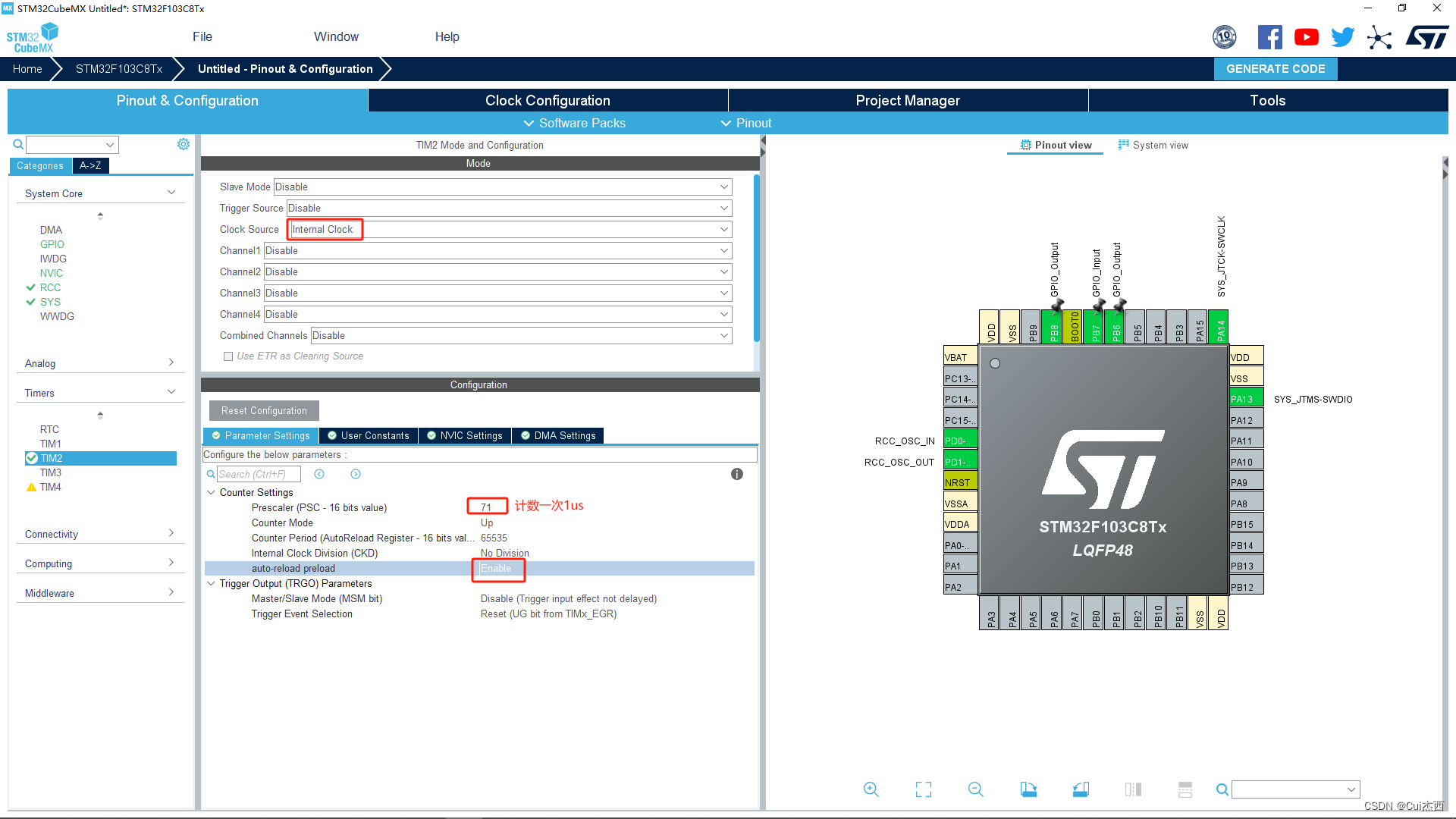
- 定时器配置:
- 使用 TIM2 ,只用作计数功能,不用作定时。
- 将 PSC 配置为 71,则计数 1 次代表 1us 。
- 编写微秒级函数:
//使用TIM2来做us级延时函数
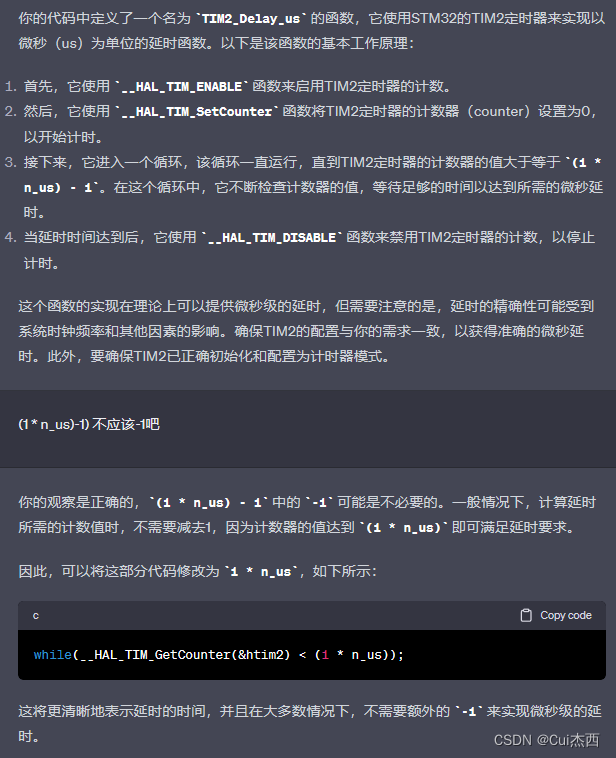
void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < (1 * n_us));/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}
- 主函数:
//1. Trig ,给Trig端口至少10us的高电平
//2. echo由低电平跳转到高电平,表示开始发送波
//波发出去的那一下,开始启动定时器
//3. 由高电平跳转回低电平,表示波回来了
//波回来的那一下,我们开始停止定时器
//4. 计算出中间经过多少时间
//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)
//每500毫秒测试一次距离
- 代码(9.sr_04_test/MDK-ARM)
int main()
{int cnt = 0;float distance = 0;HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_TIM2_Init();while (1){//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_RESET);HAL_TIM_Base_Start(&htim2);//启动定时器__HAL_TIM_SetCounter(&htim2,0);//从0开始计数//3. 由高电平跳转回低电平,表示波回来了//波回来的那一下,我们开始停止定时器while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_SET);HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)distance = 340*100*0.000001*cnt/2; //单位:cmif(distance < 5)HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);elseHAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);//每500毫秒测试一次距离HAL_Delay(500);}
}
10. 封装超声波测距代码(326.30)
- 工程配置

- 代码(10.rubbish_test/MDK-ARM)
//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}
double get_distance()
{int cnt = 0;//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_RESET);HAL_TIM_Base_Start(&htim2);//启动定时器__HAL_TIM_SetCounter(&htim2,0);//从0开始计数//3. 由高电平跳转回低电平,表示波回来了//波回来的那一下,我们开始停止定时器while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_SET);HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)return (340*100*0.000001*cnt/2); //单位:cm
}
int main(void)
{float distance = 0; HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_TIM2_Init();while (1){distance = get_distance();if(distance < 5)HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);elseHAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);//每500毫秒测试一次距离HAL_Delay(500);}
}
11. 实现距离感应开关盖(327.31)
- 代码(10.rubbish_test/MDK-ARM)
void openStatusLight()
{//点亮LED1HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
}
void closeStatusLight()
{//熄灭LED1HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);HAL_Delay(150);每150毫秒测试一次距离
}void initSG90_0()
{HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4); //启动定时器4__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度
}void openDusbin()
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15); //将舵机置为90度HAL_Delay(100);
}
void closeDusbin()
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度HAL_Delay(150);//每150毫秒测一次距离
}
12. 添加按键开盖功能(328.32)
- STM32CubeMx工程配置
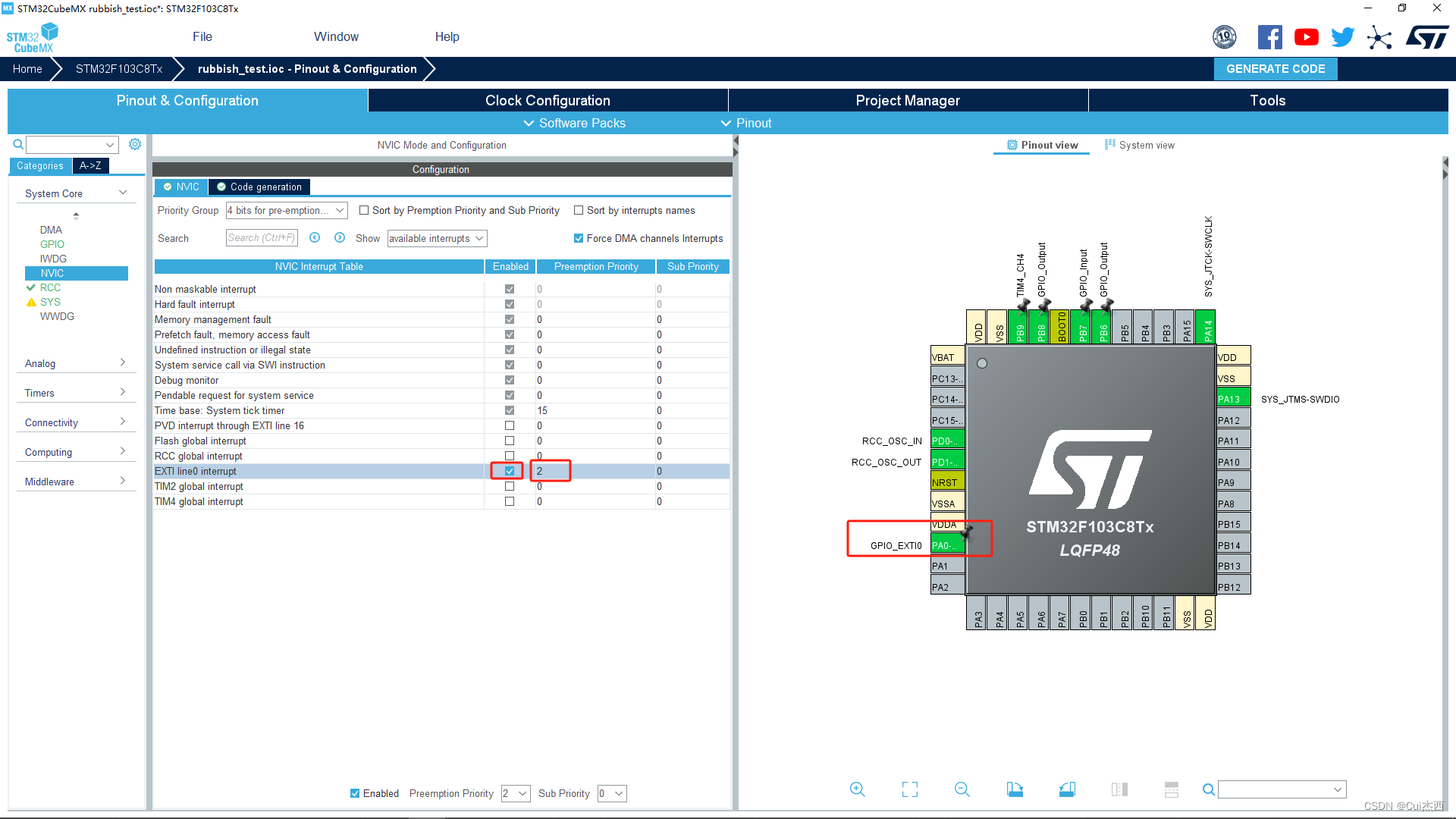
- 代码(10.rubbish_test/MDK-ARM)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == GPIO_PIN_0){openDusbin();}
}
13. 添加震动开盖功能(329.33)
- STM32CubeMx工程配置
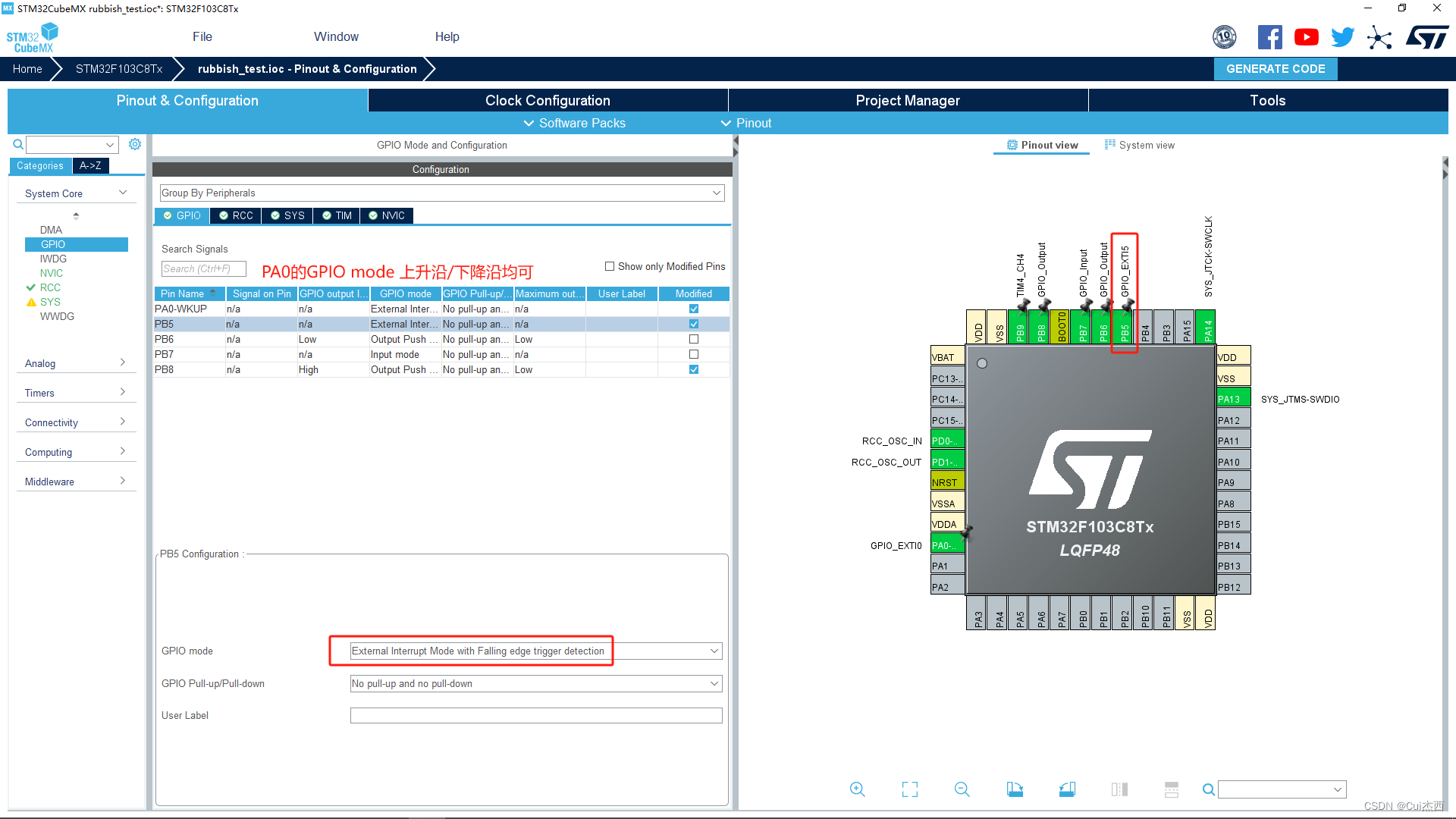
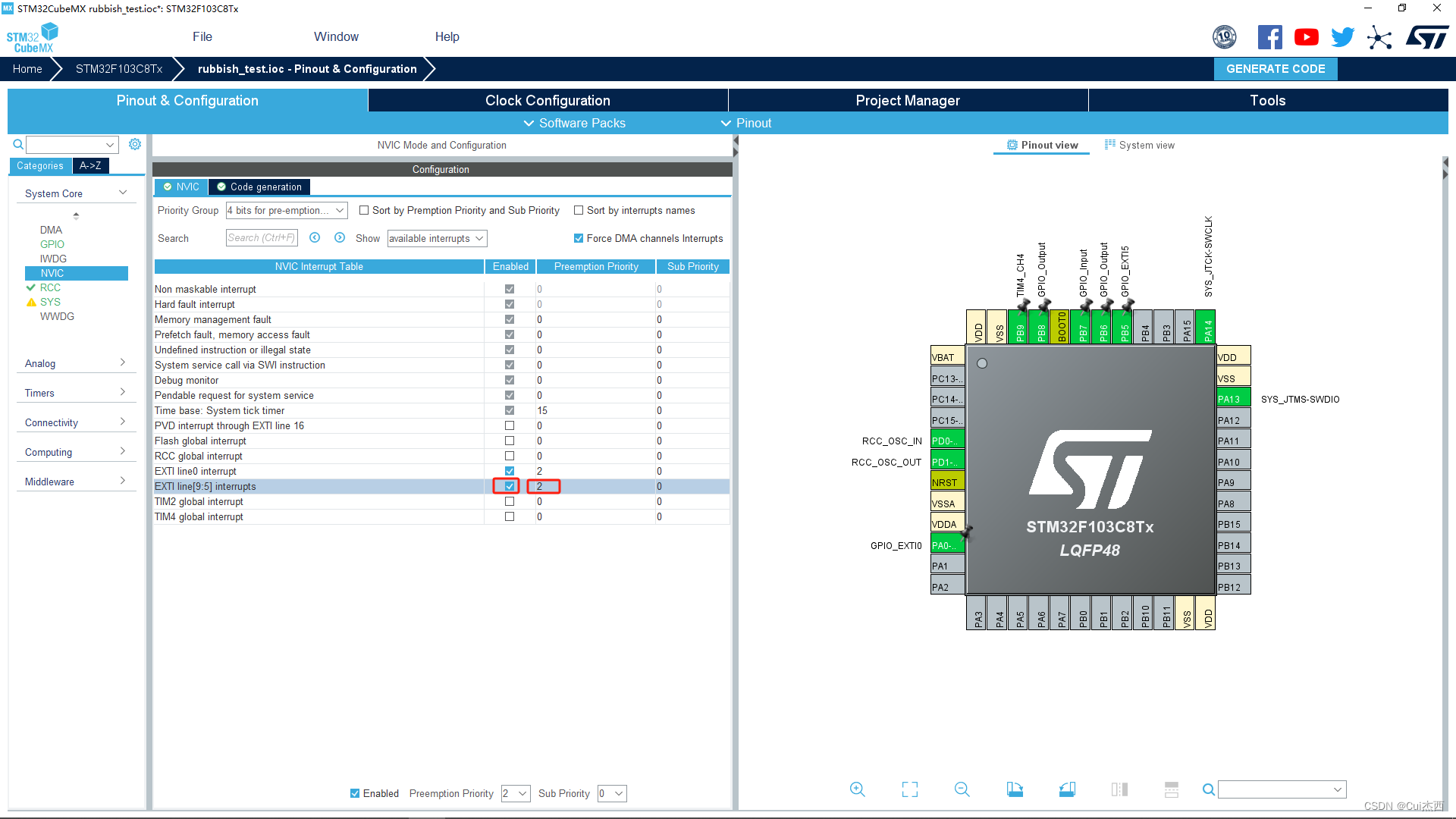
- 代码(10.rubbish_test/MDK-ARM)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == GPIO_PIN_0 || GPIO_Pin == GPIO_PIN_5){if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET || //按键HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_RESET) // 震动传感器{openStatusLight();//开灯openDusbin();//开盖}}
}
14. 添加蜂鸣器(330.34)
- STM32CubeMx工程配置
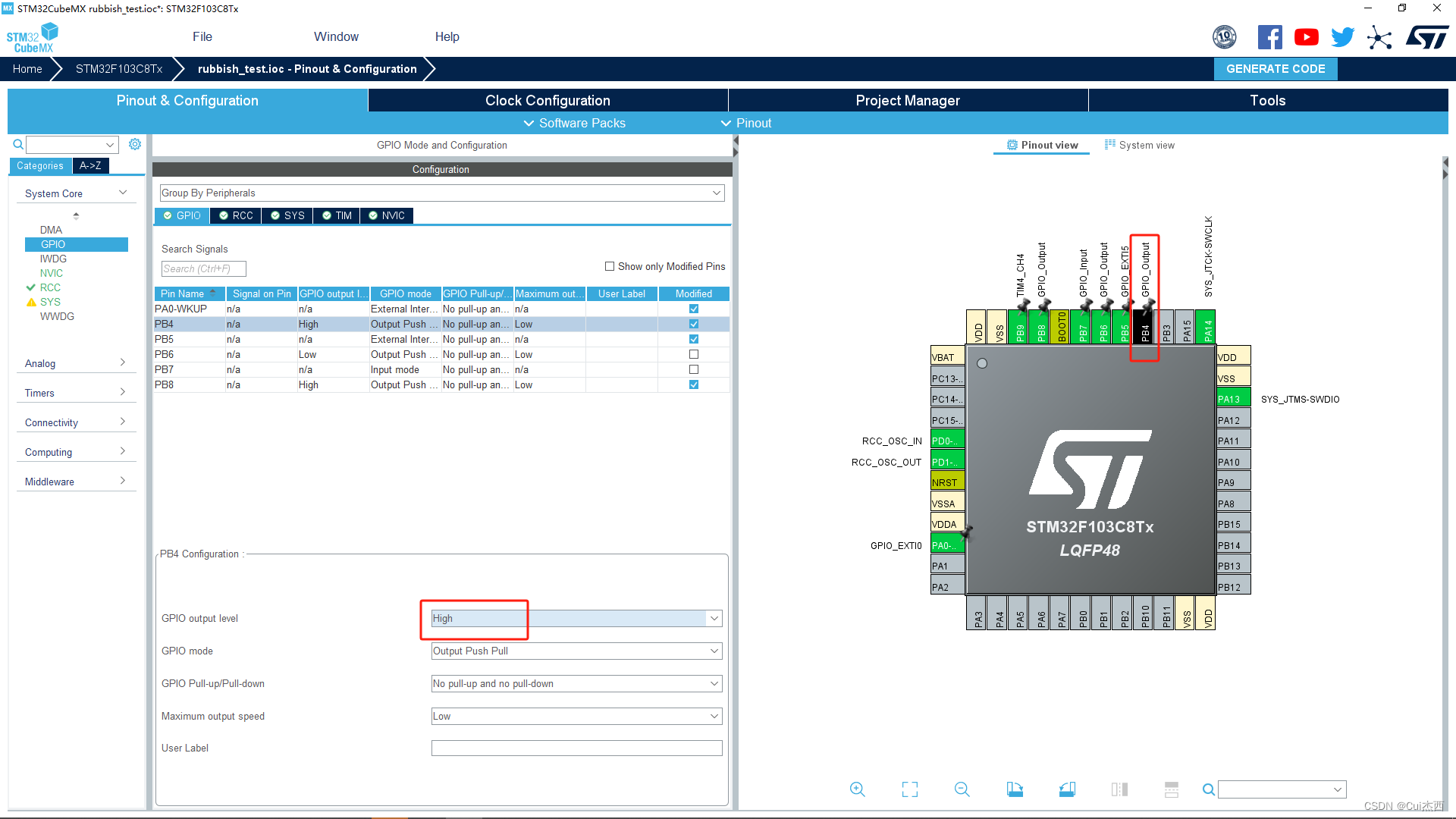
- 代码(10.rubbish_test/MDK-ARM)
void openDusbin()
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15); //将舵机置为90度HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);HAL_Delay(100);//蜂鸣器响100msHAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET);HAL_Delay(2000);//开盖两秒
}
15. 解决垃圾筒抽抽Bug(331.35)
- 代码(10.rubbish_test/MDK-ARM)
void openDusbin()
{if(flag == CLOSE){flag = OPEN;__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15); //将舵机置为90度HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);HAL_Delay(100);//蜂鸣器响100msHAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET);}HAL_Delay(2000);//开盖两秒
}
void closeDusbin()
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度flag = CLOSE;HAL_Delay(150);//每150毫秒测一次距离
}
相关文章:
STM32F103C8T6第三天:pwm、sg90、超声波、距离感应按键开盖震动开盖蜂鸣器
1. 定时器介绍1(317.21) 软件定时(之前的定时方法)(软件延时)缺点:不精确、占用CPU资源 void Delay500ms() //11.0592MHz {unsigned char i, j, k;_nop_();i 4;j 129;k 119;do{do{while (-…...
栈的顺序存储实现(C语言)(数据结构与算法)
栈的顺序存储实现通常使用数组来完成。实现方法包括定义一个固定大小的数组,以及一个指向栈顶的指针。当元素入栈时,指针加一并将元素存储在相应位置;当元素出栈时,指针减一并返回相应位置的元素。 1. 顺序栈定义 #define MaxSi…...

设计模式 -- 观察者模式
说明 author blog.jellyfishmix.com / JellyfishMIX - githubLICENSE GPL-2.0 定义 观察者模式(Observer Design Pattern) 也被称为发布订阅模式(Publish-Subscribe Design Pattern)。在 GoF 的《设计模式》一书中,它的定义是这样的: Define a one-to-many depe…...

Go RabbitMQ简介 使用
RabbitMQ简介 RabbitMQ 是一个广泛使用的开源消息队列系统,它实现了高级消息队列协议(AMQP)标准,为分布式应用程序提供了强大的消息传递功能。RabbitMQ 是 Erlang 语言编写的,具有高度的可扩展性和可靠性,…...

【面经】Spring框架中用了哪些设计模式
在Spring框架中,主要运用了以下几种设计模式: 工厂模式: Spring beanFactory使用工厂模式在应用程序中管理对象的创建。 通过使用工厂模式,Spring可以将对象的创建与使用分离,降低耦合度。 单例模式: Spr…...
SpringBoot自动配置的原理篇,剖析自动配置原理;实现自定义启动类!附有代码及截图详细讲解
SpringBoot 自动配置 Condition Condition 是在Spring 4.0 增加的条件判断功能,通过这个可以功能可以实现选择性的创建 Bean 操作 思考:SpringBoot是如何知道要创建哪个Bean的?比如SpringBoot是如何知道要创建RedisTemplate的?…...

苹果Ios系统app应用程序开发者如何获取IPA文件签名证书时需要注意什么?
今天呢想和大家介绍介绍苹果App开发者如何获取IPA文件签名证书的步骤和注意事项。对于苹果应用程序开发者而言,获取IPA文件签名证书是发布应用程序至App Store的重要步骤之一。签名证书能够确保应用程序的安全性和可信度,并使其能够在设备上正确运行。 …...
算法通关村第七关-黄金挑战二叉树迭代遍历
大家好我是苏麟 , 今天带来二叉树的迭代遍历 . 二叉树的迭代遍历 前序编列 描述 : 给你二叉树的根节点 root ,返回它节点值的 前序 遍历。 题目 : LeetCode 二叉树的前序遍历 : 144. 二叉树的前序遍历 分析 : 前序遍历是中左右,如果还有左子树就一…...
2023-11-Rust
学习方案:Rust程序设计指南 1、变量和可变性 声明变量:let 变量、const 常量 rust 默认变量一旦声明,就不可变(immutable)。当想改变 加 mut(mutable) 。 const 不允许用mut ,只能声明常量,…...

iOS代码混淆----自动
先大致解释一下“编译"、"反编译": 编译:就是把千千万万行字符串(也叫代码,或者源文件),变成010101010101(机器码,也叫目标代码) 编译过程:预处理-编译-汇编-链接 我的脚本运行在预处理阶段。 反编…...
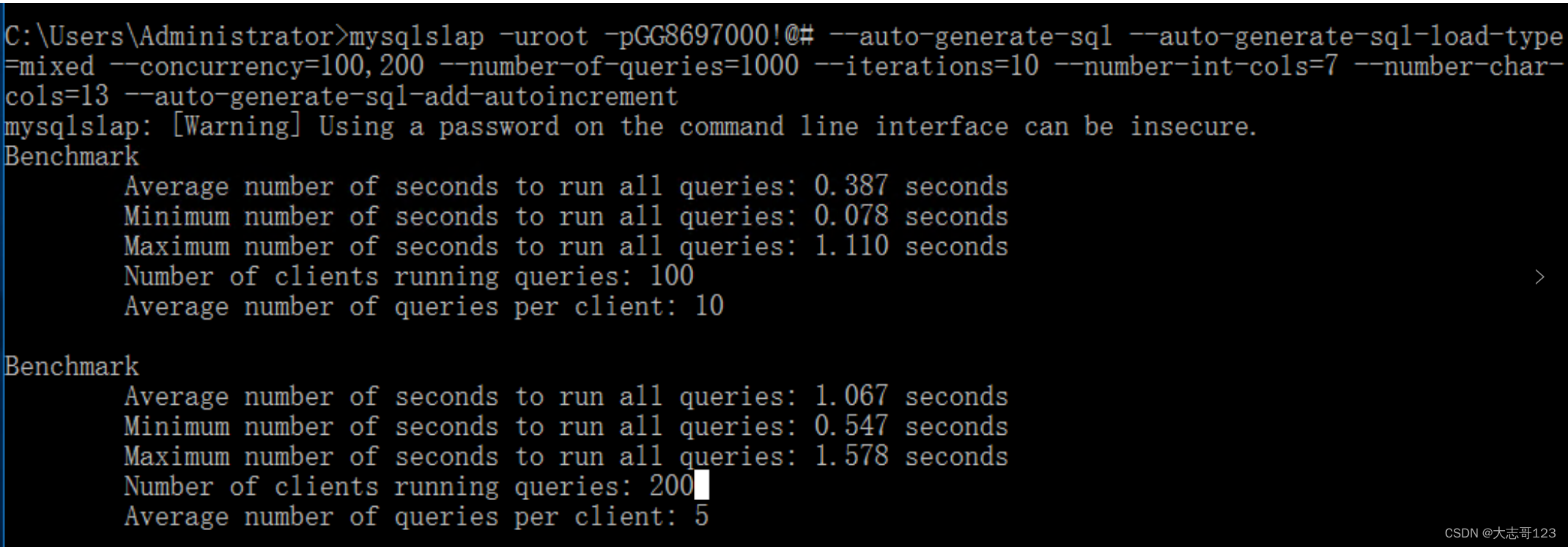
对Mysql和应用微服务做TPS压力测试
1.对Mysql 使用工具:mysqlslap工具 使用命令: mysqlslap -uroot pGG8697000!#--auto generate sql -auto generate sql-load typemixed-concurrency100,200 - number of queries1000-iterations10 - number-int-cols7 - number-charcols13auto genera…...
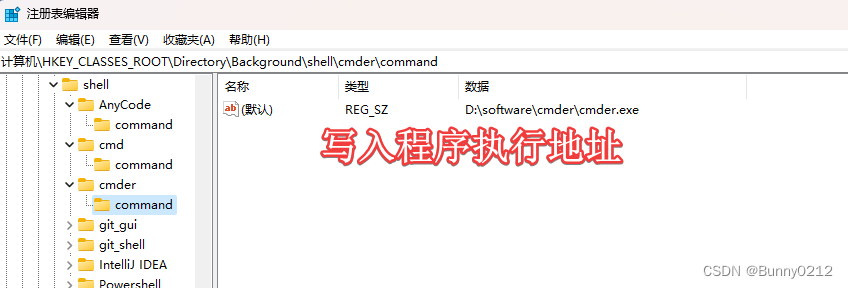
将程序添加至右键菜单
将程序添加至右键菜单 手动导入 如果要将cmder添加至右键菜单。可以通过编写reg注册表方式添加 也可以在路径HKEY_CLASSES_ROOT\Directory\Background\shell中右击添加 创建项commadn 编写reg注册表 [HKEY_CLASSES_ROOT\Directory\Background\shell\cmder]为注册表地址 Wi…...

三板斧的使用、全局配置文件、静态文件的配置、orm介绍
三板斧的使用 【1】HttpResponse 返回字符串类型 【2】render 返回html页面,并且在返回给浏览器之前还可以给html页面传值 【3】redirect 重定向页面 视图函数必须返回一个 HttpResponse 对象 def index(request):print(request)# return HttpResponse("r…...
【编程实践】黑框框里的打字小游戏,但是汇编语言
开始: 在学习王爽的《汇编语言》的过程中,我就真切地体会到编程实践对于理解的帮助。起初我没有安装书中的实验环境,看到100页左右就开始感觉无趣、吃力,看了后面忘前面,差点就要放弃这本书的学习。好在我后来还是装好…...
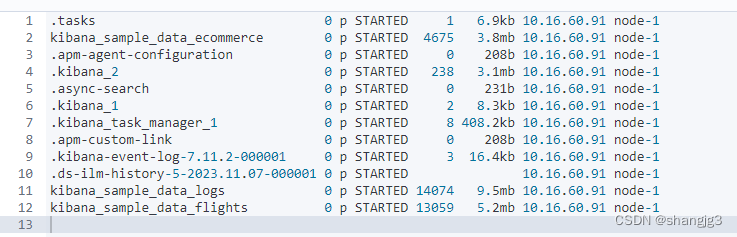
ElasticSearch的集群、节点、索引、分片和副本
Elasticsearch是面向文档型数据库,一条数据在这里就是一个文档。为了方便大家理解,我们将Elasticsearch里存储文档数据和关系型数据库MySQL存储数据的概念进行一个类比 ES里的Index可以看做一个库,而Types相当于表,Documents则相当…...

std::cout无法打印uint8_t类型的数据
std::cout在处理uint8_t变量类型的时候默认输出字符,刚好数字0-10对应的ascii字符都是不可打印的 解决: 使用static_cast std::cout << static_cast<int>(time) << std::endl;参考文章:https://blog.csdn.net/weixin_459…...
浅谈泛在电力物联网在智能配电系统应用
贾丽丽 安科瑞电气股份有限公司 上海嘉定 201801 摘要:在社会经济和科学技术不断发展中,配电网实现了角色转变,传统的单向供电服务形式已经被双向能流服务形式取代,社会多样化的用电需求也得以有效满足。随着物联网技术的发展&am…...

已解决:云原生领域的超时挂载Bug — Kubernetes深度剖析
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

概念解析 | 高光谱图像:揭开自然世界的神秘面纱
注1:本文系“概念解析”系列之一,致力于简洁清晰地解释、辨析复杂而专业的概念。本次辨析的概念是:高光谱图像 高光谱图像:揭开自然世界的神秘面纱 Hyperspectral imaging - Wikipedia 背景介绍 我们生活的世界充满了丰富多彩的颜色。这些颜色来源于各种物体反射或吸收不同波长…...
Java类和对象(1)
🐵本篇文章将会开始对类和对象的第一部分讲解 一、简单描述类和对象 对象可以理解为一个实体,在现实生活中,比如在创建一个建筑之前,要先有一个蓝图,这个蓝图用来描述这个建筑的各种属性;此时蓝图就是类&a…...

如何快速获取百度网盘直链:3步终极解决方案告别限速困扰
如何快速获取百度网盘直链:3步终极解决方案告别限速困扰 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 你是否曾因百度网盘的下载速度限制而倍感焦虑?…...

从《我的第一份工作》看技术面试:如何避免踩中那些‘令人沮丧的旅程’和‘最后一根稻草’
技术面试避坑指南:从经典文学拆解职场生存法则 伦敦郊外那所红砖学校的面试经历,放在今天的技术招聘场景中依然能引发强烈共鸣——不专业的面试官、模糊的岗位职责、糟糕的办公环境,以及最后那根压垮求职者的"稻草"。这些上世纪文学…...

ML:多项式回归的基本原理与实现
在机器学习中,回归任务关注的是“预测一个连续数值”。当输入特征与目标变量之间的关系近似线性时,线性回归往往可以取得不错效果;但在很多实际问题中,这种关系并不总是一条直线,而更可能呈现弯曲、拐点或增长速度变化…...

终极指南:如何使用League Akari免费提升英雄联盟游戏体验
终极指南:如何使用League Akari免费提升英雄联盟游戏体验 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League Akari是一款基于英…...

拉格朗日乘数法与KKT条件在优化问题中的应用
1. 拉格朗日乘数法基础回顾在深入探讨不等式约束之前,让我们先回顾一下拉格朗日乘数法的基本概念。这个方法由18世纪数学家约瑟夫路易斯拉格朗日提出,用于求解带有等式约束的优化问题。想象你是一位登山者,想要找到山脉的最高点,但…...

从传感器到屏幕:揭秘ISP图像处理流水线的核心算法与场景适配
1. ISP图像处理流水线的基础原理 当你用手机拍下一张照片时,从按下快门到最终成像,背后隐藏着一套精密的数字暗房工艺。这就是ISP(图像信号处理器)的工作流程,它像一条全自动流水线,把传感器捕捉到的原始电…...

边缘节点的PHP应用部署、数据同步、算力调度标准化方案=hyperf最
针对边缘节点场景,按三个维度给你整理最实用的 Hyperf 方案:---一、应用部署标准化 容器化 & 打包 …...

Logstash配置避坑指南:手把手教你解析华为、H3C、Cisco交换机日志的Grok正则怎么写
Logstash配置避坑指南:手把手教你解析华为、H3C、Cisco交换机日志的Grok正则怎么写 当你第一次尝试用Logstash解析网络设备日志时,可能会遇到这样的情况:配置文件看起来一切正常,但日志字段就是解析不出来,或者解析结…...
)
1.2 VMware部署Rocky Linux 9 (MBR分区表,图形化安装)
1.如图网站下载Rocky Linux 9镜像 Download - Rocky Linux 2.创建新的虚拟机 3.自定义下一步 4.默认下一步 5.稍后安装操作系统,下一步 6.选择合适的版本,下一步 7.自定义虚拟机名称和存储位置 8.自定义内核数 9.自定义内存大小 10.自定义虚拟机网络连接…...
