3DMAX汽车绑定动画模拟插件MadCar疯狂汽车使用教程
3DMAX汽车绑定动画模拟插件MadCar疯狂的汽车,用于通过模拟控制来快速装配轮式车辆及其动画。这个新版本允许装配任何数量的车轮的车辆,以及包括摩托车在内的任何相互布置。还支持任意数量的拖车。
每个车轮和悬架都有简化的行为设置以及微调,这可以模拟赛车和重型卡车的运动。动画是在模拟过程中实时创建的。模拟可以通过键盘、操纵杆、游戏控制器或方向盘进行控制。还支持“跟随对象”模式。
该软件包还包括一个程序贴图,可在车辆行驶的表面上生成轮胎痕迹(仅限V-Ray)。
主要功能:
*任意数量的车轮,以及它们的任何相互布置
*包括摩托车索具
*新助手“力量”可以模拟任何外力
*新的助手“碰撞球体”有助于模拟地面和车辆任何部分之间的碰撞
*芒果管道支持
系统要求:
3ds Max2014 - 2024
3ds Max Design:全部
操作系统:Windows XP、Windows Vista、Windows 7、8、10、11 32位和64位均可。
轮胎标记需要V-Ray渲染引擎。
开始使用:
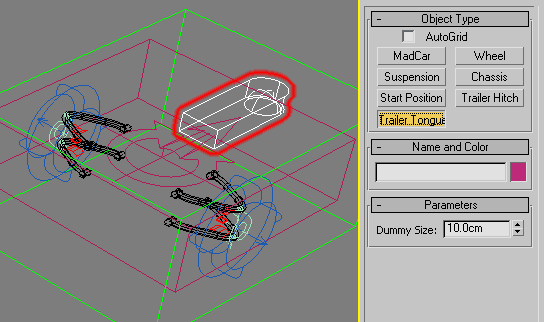
安装后,可以从3dMax命令面板创建 MadCar:
创建 > 帮助 > MadCar
插件包括以下对象类型:
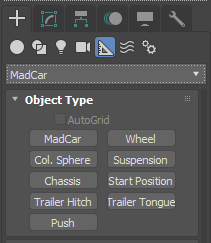
§底盘用于汽车框架。
§悬架用于减震器。
§轮子是汽车的轮子。
§MadCar正在管理皮肤。
§起始位置设置汽车的初始位置。
§用于连接车辆的拖车挂钩和拖车舌对象。
不要缩放和镜像这些对象。仅旋转和移动是可接受的。
所有对象都可以与几何图形链接
底盘可以与车架的几何形状连接。
悬架可以与制动块和悬架安装部件的几何形状相连接。
车轮可以与车轮几何形状关联。
底盘
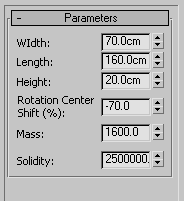

底盘决定了汽车的整体尺寸、质量以及车轮与表面突然碰撞时的坚固性。
§宽度等于汽车宽度的一半。
§长度等于汽车长度的一半。
§高度等于汽车高度的一半。
§质量是汽车的质量,以千克为单位。坚固性是汽车的结构刚度。
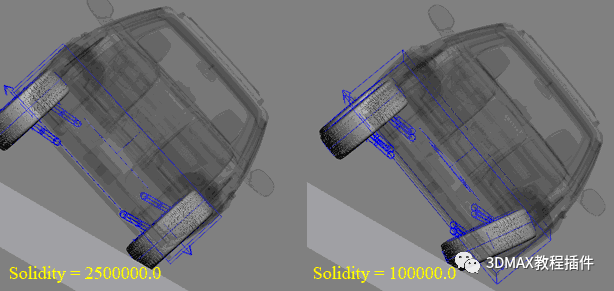
§坚固性是汽车的结构刚度
质量值决定了汽车的反应性/惰性。重量越重,悬架下垂得越厉害,汽车加速和停止的速度就越慢。
坚固性决定了变形抗力。当车轮与地面突然碰撞时,轮轴可能会弯曲并偏离初始位置。高硬度时发散较小。
旋转轴的位置影响方向盘的行为。以下是 -75%、0%、75% 值的示例。

悬架
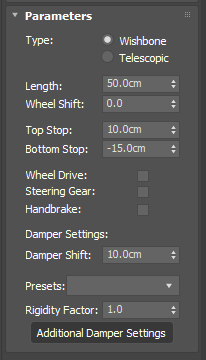
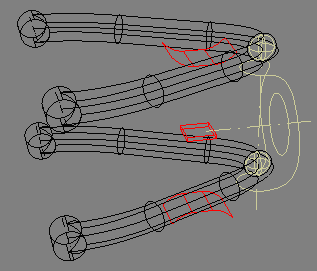
悬架部分控制汽车悬架设置,例如交叉悬架连杆的长度、弹簧刚度、油阻尼、缓冲气体张力、悬架限制、发动机驱动、转向和其他设置。
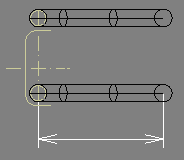
长度是交叉悬架连杆的长度。
顶部止动件和底部止动件是顶部和底部悬挂块止动件

轮驱动是发动机驱动。
转向装置是转向连杆机构。当方向盘转动时,车轮也会转动。
手刹通过手刹将车轮锁定。
阻尼器设置
Plug-in 展示了气油阻尼器的模型。
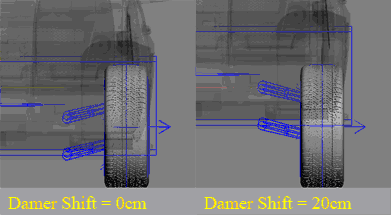
阻尼器移位是阻尼器顶部支架的移位
预设有助于快速设置,无需深入了解阻尼器功能 - 您有机会选择阻尼器参数预设。
刚性系数可让您校正所得的阻尼器电阻值,而无需一一固定多个参数。在大多数情况下,使用这些设置足以进行调节。
附加阻尼器设置用于阻尼器参数的详细设置。这些设置适用于能够微调阻尼器参数的高级用户。
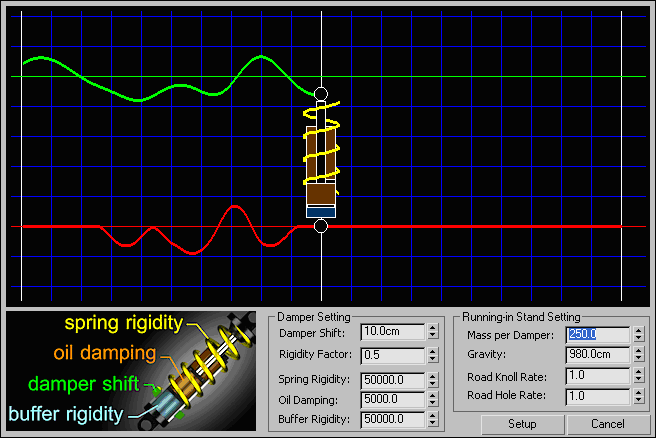
磨合测试模式下,系统实时生成道路不平整情况,并显示阻尼器对此的响应。
§阻尼器设置是阻尼器参数。
§弹簧刚度是弹簧的刚度。
§油阻尼就是耐油性。
§缓冲器刚度是缓冲器刚度。
§磨合台设置是测试台的参数。
§每个阻尼器的质量:它是落在阻尼器上的质量。例如,如果四轮汽车的质量为 1000 公斤,则每个阻尼器上将承受 250 公斤的重量。
§重力:它是自由落体的加速度/重力因子。它以厘米 - 980cm/s2、米 - 9.8m/s2 或英寸 - 386“/s2 表示。
§道路小丘率是指道路上小丘分布的频率。
§道路孔洞率是指道路上孔洞分布的频率。
车轮


车轮部分设置车轮的尺寸和属性。
§半径是轮子的半径。
§宽度是车轮的宽度。
§质量是车轮的质量,以千克为单位。
§坚固性是指车轮的刚度。粗糙度越小,车轮表面的弹性变形越深。
§抓地力是表面摩擦力的常数。摩擦常数越大,汽车打滑越少,但急转弯时翻车的可能性也越高。安装车轮时,确保车轮箭头指向车外方向,而不是车内方向。
胎面花纹——轮胎痕迹。用于生成轮胎痕迹的纹理。胎面方向的示例。

设置车轮时,车轮箭头必须指向车外而不是车内。
MadCar
这个对象代表将所有汽车部件组合成一个整体的皮肤。


汽车安装是将汽车组装成一个单元。
虚拟尺寸设置皮肤的尺寸。
皮肤内部发生的所有组件都会自动应用。
对于汽车的组装,蒙皮内 应有一个 底盘对象以及相同数量的车轮和 悬架对象。
每对悬架和车轮应具有相同的位置,如下所示:

根据所需配置放置所有汽车部件。如下,例如:
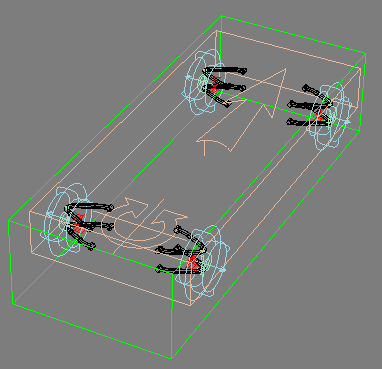
然后按更新(锁定组件)
如果组装成功,组件应被锁定(无法移动它们)并呈蓝色,如下所示。此后对组件的任何更改都不会影响整个装置。要更新参数,您需要再次 按更新(锁定组件) 。
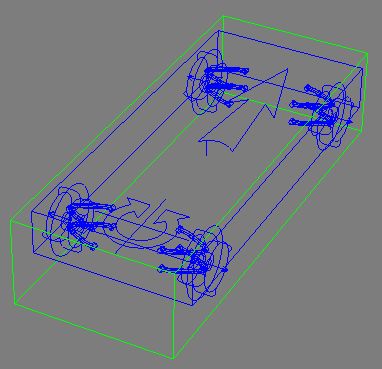
如果您想解锁组件并更改其位置,请按重置(解锁组件)。
参数
参数为通用参数。
重力是自由落体的加速度/重力因子。它以厘米 - 980cm/s2、米 - 9.8m/s2 或英寸 - 386”/s2 表示。
表面是汽车将在其上移动的表面对象。选择和更改对象以及加载场景后, 必须按“更新表面”。它与车轮与地面相互作用的算法相联系,该算法使用射线追踪加速器 ,合理地加快了计数过程,并使计数时间几乎与表面内的多边形数量无关。
起始位置定义了将作为汽车起始位置的对象位置。如果选择了该对象,则按更新(锁定组件)后,汽车将自动替换到起始位置。
动画
动画包括计数和动画设置:
步骤/帧固定帧的关键点数量。此设置值较高会提高计数精度,但会降低计数速度;它还导致HDD上场景大小的增加。该设置值过低可能会导致高速行驶时车轮运行不均匀。
样本固定每个步骤的计数/估算样本数。该设置值较高会提高计数精度,但会降低计数速度。
上述设置值过低可能会导致车轮振动,车辆在制动状态下在斜坡上滑行。
驱动参数
驾驶参数是汽车驾驶设置。
舵灵敏度是方向盘的响应。值越低,舵的反应就越小。将此设置固定为较低值以使车轮平滑/缓慢转动,较高值将导致车轮快速转动。
舵角是终极转向锁。
自行车驾驶打开摩托车控制系统
AutoBalance帮助摩托车保持平衡并防止摔倒
摩托车装备视频教程:
差速驱动灵敏度- 转弯时车轮的多向运动。例如,右转时,右轮将向后旋转,向左向前旋转。
油门灵敏度是加速踏板的响应。该值越高,给予驱动轮的冲力就越大。
制动灵敏度是制动踏板的反应。高值使制动更加主动/强烈。
最大漂移速度- 车轮的最大滑动速度高于此速度,自动释放油门和制动器。这个参数越小,机器的行为就越可预测,但极端驾驶的可能性就越小。低值(1-3公里/小时)建议初学者使用。
Time Delay是帧之间的时间延迟,以毫秒为单位设置。为了区分鼠标和键盘反应所需的CPU时间,需要时间延迟。如果该值太小,驱动控制可能会反应迟缓,甚至被阻塞。在这种情况下,应延长延迟时间。
驾驶类型是驾驶控制的类型。可能有以下变体:
鼠标是用鼠标进行驾驶控制。鼠标向左或向右移动使轮子分别转动。鼠标的上下移动对应于加速和减速。车轮向前运转即进入前进档。车轮向后转动进入倒档。鼠标右键负责手刹。
键盘是通过键盘进行驱动控制。“A”键用于向左转。“D”键是向右转。“W”键是加速器。“S”键是刹车键。空格键用于手刹。 PAGE UP进入前进档。 PAGE DOWN进入倒档。
操纵杆 驾驶控制装置为: 4为前进档。 2是倒档。 3是手刹。

方向盘 驾驶控制:变速箱手柄负责换档(前进档/倒档),标记按钮为手刹。

目标是目标对象/要遵循的对象。预测帧表示汽车预测物体运动以进行轨迹计算的帧数。
驾驶
它激活汽车驾驶窗。
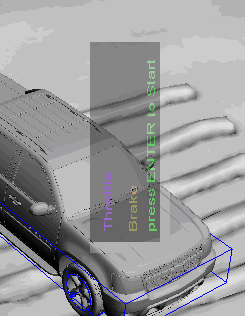
要开始/停止驾驶,请按ENTER。
拖车
为了连接两辆车,将拖车挂钩添加到轨道上将连接拖车的位置。

将拖车舌 添加 到拖车上将连接卡车的位置。
用 拖车舌连接拖车挂钩,如下所示
车辆现已加入。
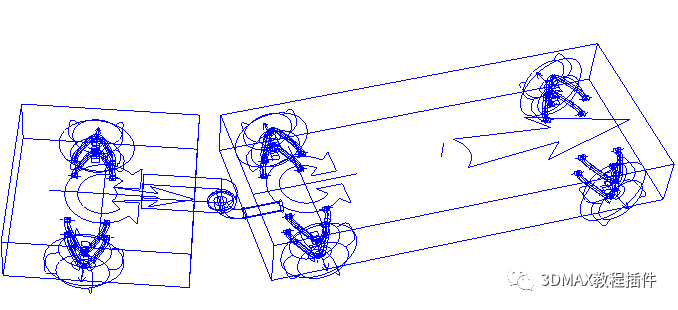
从现在开始,如果您移动卡车,拖车就会跟随它
轮胎痕迹(需要 V-Ray)
MadCarTrackTexture。用于制作轮胎标记。

MadCar 对象- 纹理生成轨迹的 MadCar 对象。
§一般强度- 车辆正常运动时痕迹的强度。
§制动强度- 车轮打滑时痕迹的强度。
§样品- 标记的质量。高值会减慢渲染速度。
§基础凹凸强度- 凹凸的总强度。
§花纹凹凸强度- 轮胎花纹的凹凸值。
MadcarTrackTexture 需要在 MadCar 行驶的对象的材质中使用。
它可以在任何插槽中使用(漫反射、凹凸、镜面反射等)。在纹理设置中,您需要指定它属于哪个 MadCar 对象。如果您需要多个 MadCar 的标记,则需要混合多个 MadcarTrackTexture
碰撞球
MadCar 中的碰撞。
MadCar 模拟中需要计算 2 种类型的碰撞 1. 车轮与地面之间的碰撞 2. “碰撞球”与地面之间的碰撞。
默认情况下,汽车的车身不会模拟翻车时可能与障碍物或地面发生的碰撞。如果你需要模拟这样的事件,你需要在MadCar rig中添加“Collision Spheres”。放置它们,使它们的组合体积重复您的车辆的形状。
尽量保持数量或球体尽可能少(最佳数量为 10-20),否则可能会减慢模拟过程。“Rigidness”参数控制碰撞的刚度,“Grip”参数控制摩擦力。您将要影响您的汽车的障碍物应包含在表面的几何形状中。
碰撞球使用示例:


烘焙到关键帧
我们最近发布了一个 烘焙脚本(VGMakeKey.ms)
将其放入场景后,您需要通过“自定义用户界面”添加到界面
烘烤时需要选择实际物体
常见问题:
MadCar 算法基于现实世界的物理原理,这需要真实世界的车辆尺寸和其他设置才能正确工作。
控制您的车辆
为了获得完美的车辆控制效果,请确保所有物理原理正确,并逐步进行模拟
开始驾驶,直到开始出错为止,停止,倒回到正常的点,然后从该点继续,这适用于您使用的任何控件
跟随目标或样条线
MadCar 基于现实生活物理特性的模拟 - 这并不总是可预测的。车辆的能力受到其物理参数、转弯半径、摩擦力、制动力、发动机功率等的限制。但目标的运动不受限制,因此车辆不能总是跟随目标,因为它有真实的目标人生体力有限,所以只能尽力而为。
许可证错误
如果出现许可证故障和错误,可能由磁盘重新格式化、重新安装操作系统或更换组件引起。
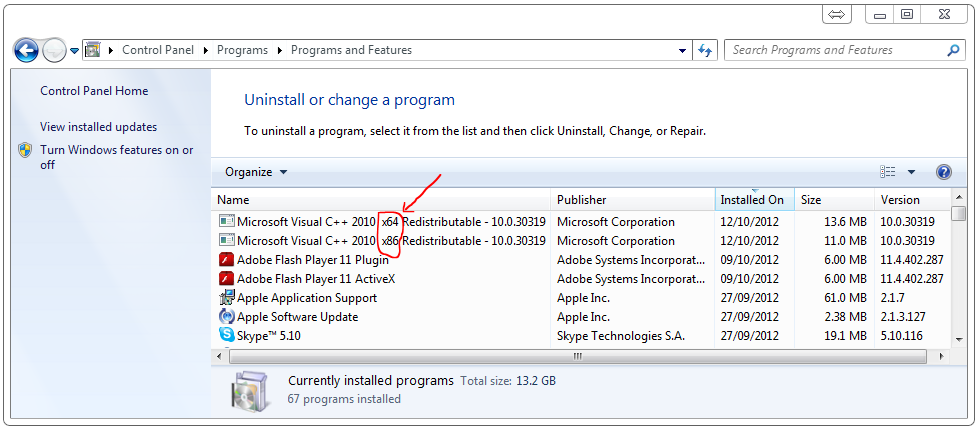
DLL 错误
§加载 Dll 时出错
§Dll 初始化失败
§错误代码 126 - 找不到指定的模块
§MadCar.dlo 初始化失败
请确保您安装了 Microsoft Visual C++ 2010 Redistributable Package 32 位或 64 位。
加载文件时出错
§MadCar.dlo 在 Windows Server 2012 上初始化失败
请注意,服务器操作系统通常不受支持,因为它可能会幸运某些组件,但 Windows Server 2012 有一个解决方法,检查 c:\windows\system32\XINPUT9_1_0.DLL 是否存在,这可以在 Windows 7 上找到
安装问题
确保 3dmax 未运行(也请在任务管理器中仔细检查)
确保您使用管理员权限进行安装(在 Windows 7 中,即使您以管理员身份登录,右键单击“以管理员身份运行” )
确保为您的 3dmax 版本选择正确的路径
其他错误
下载最新版本的MadCar插件。
相关文章:
3DMAX汽车绑定动画模拟插件MadCar疯狂汽车使用教程
3DMAX汽车绑定动画模拟插件MadCar疯狂的汽车,用于通过模拟控制来快速装配轮式车辆及其动画。这个新版本允许装配任何数量的车轮的车辆,以及包括摩托车在内的任何相互布置。还支持任意数量的拖车。 每个车轮和悬架都有简化的行为设置以及微调,…...

比较PID控制和神经网络控制在机器人臂上的应用
机器人臂是自动化领域中常见的机器人形式,其精确控制对于实现复杂任务具有重要意义。在机器人臂的控制中,PID控制和神经网络控制是两种常用的控制方法。本文将比较PID控制和神经网络控制在机器人臂控制方面的应用,包括控制原理、优缺点以及在…...

ubuntu16.04 交叉编译 mbedtls
在为客户交叉编译项目时需要依赖 mbedtls, 客户的机器是 arm64 的 ubuntu 16.04, 交叉编译过程中遇到几个问题。 首先, mbedtls 需要依赖 python, 在 cmake 的过程中, 如果不是使用系统默认的 cmake 可能会导致,mbedt…...
基于遗传算法优化的直流电机PID控制器设计
PID控制器是工业控制中常用的一种控制算法,通过不断调节比例、积分和微分部分来实现对系统的稳定控制。然而,在一些复杂系统中,传统的PID参数调节方法可能存在局限性。本文将介绍一种基于遗传算法优化的直流电机PID控制器设计方法,…...

大数据-之LibrA数据库系统告警处理(ALM-12036 license文件即将过期)
告警解释 系统每天零点检查一次当前系统中的license文件,如果当前时间距离过期时间不足60天,则license文件即将过期,产生该告警。 当重新导入一个正常license,告警恢复。 说明: 如果当前集群使用节点数小于等于10节…...
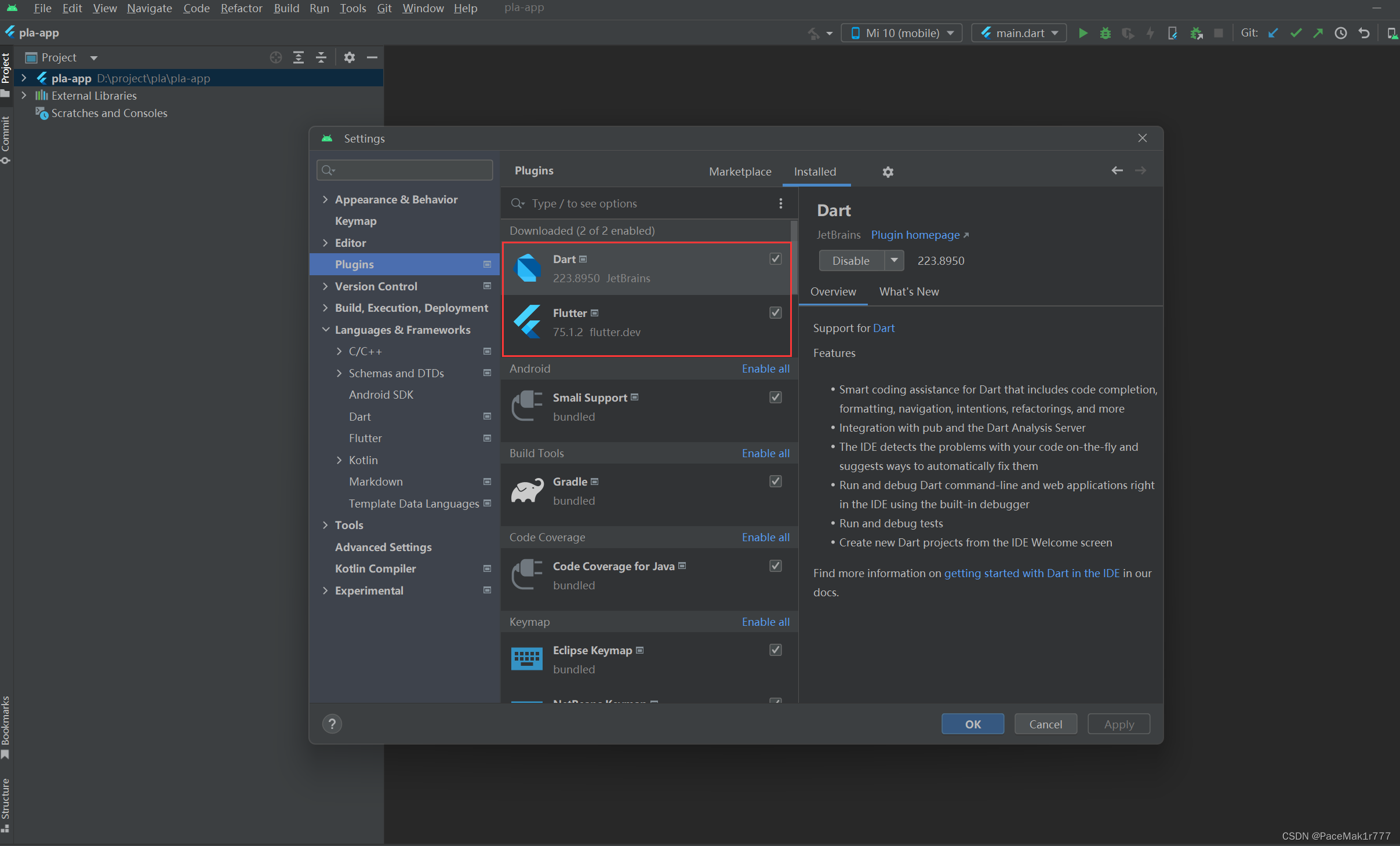
关于Android Studio中开发Flutter配置
配置系统环境变量:path下 ,flutter的bin目录下 File->Settings->Languages&Frameworks->FlutterFile->Settings->Languages&Frameworks->DartFile->Settings->Languages&Frameworks->Android SDK 确认是…...
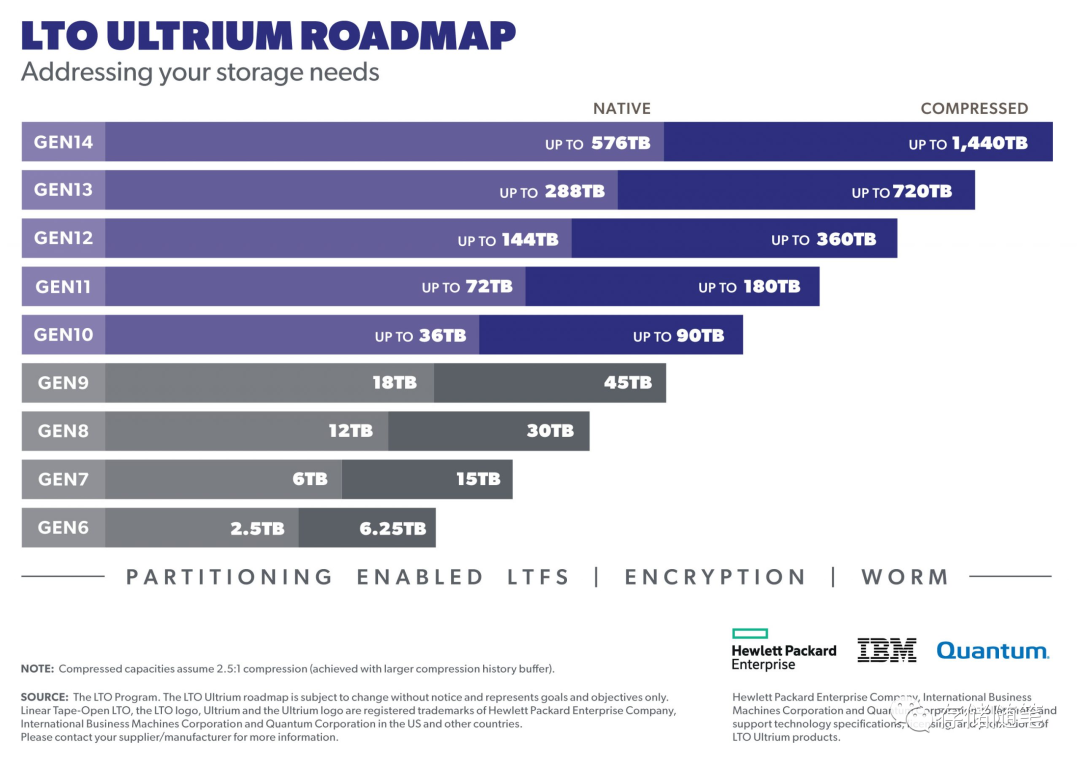
大容量疯了!居然想把磁带放到硬盘,100TB+是否可以实现?
1.引言 上一篇关于大容量硬盘的文章(HDD最后的冲刺:大容量硬盘的奋力一搏)中,我们针对大容量硬盘研发状态,小编最近又有了新发现。WDC希望可以通过HDD和磁带结合,把盘的容量提升到100TB。 2.数据大爆炸的…...

C++之map的介绍
C之map的介绍 1。定义和初始化 map可以使用一对<key, value>来初始化,如下所示: std::map<int, std::string> my_map { {1, "one"}, {2, "two"}, {3, "three"} };这将创建一个map,其中键是整数&…...
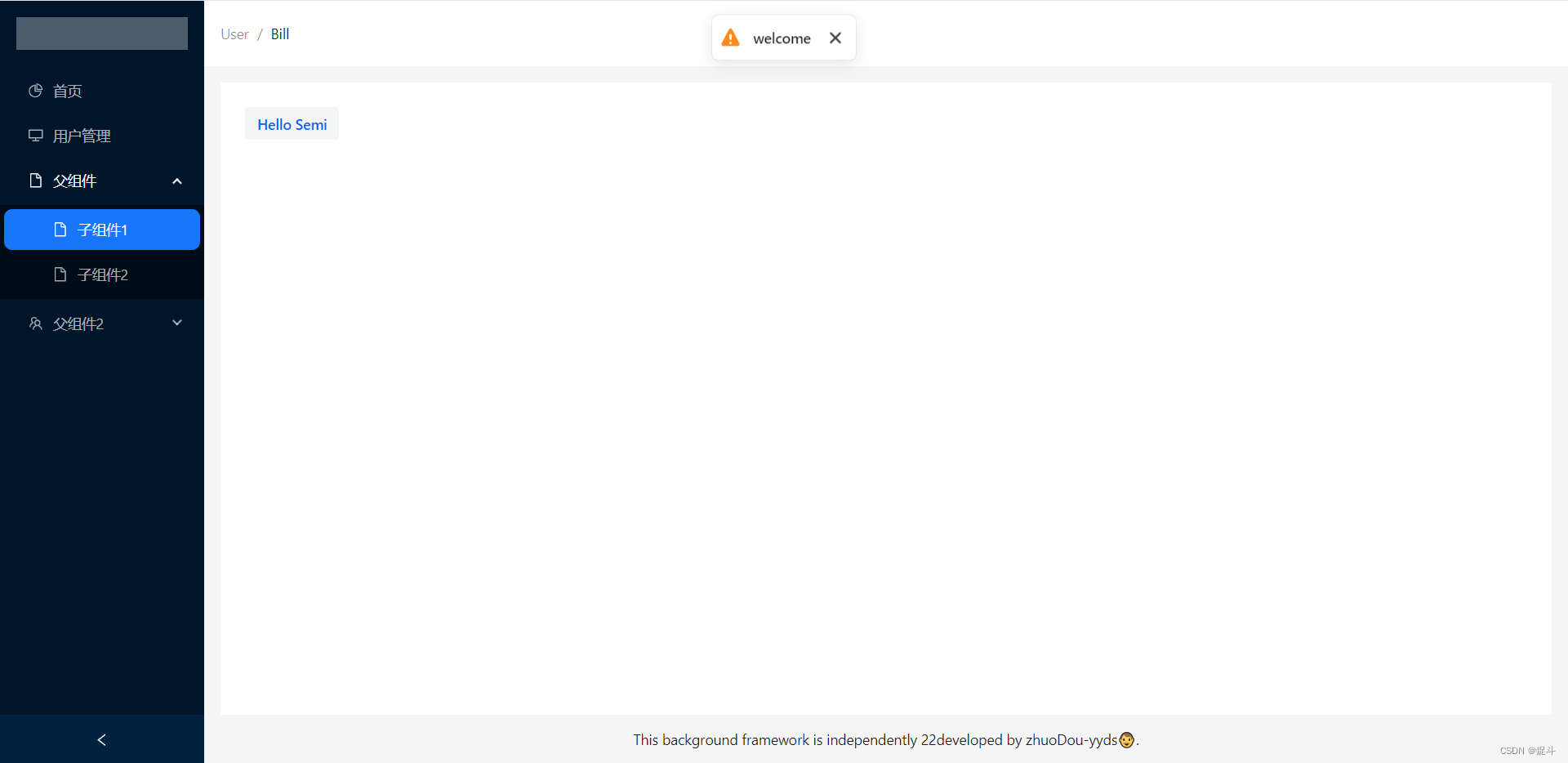
非常好用的组件库【semi.design】
文章目录 前言semi.design是什么?怎么使用?设计稿转代码后言 前言 hello world欢迎来到前端的新世界 😜当前文章系列专栏:前端系列文章 🐱👓博主在前端领域还有很多知识和技术需要掌握,正在不…...
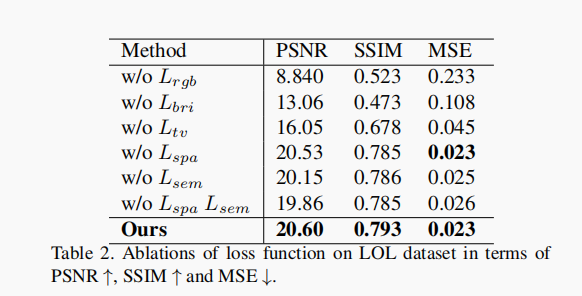
Semantic-Guided Zero-Shot Learning for Low-Light ImageVideo Enhancement
论文阅读之无监督低光照图像增强 Semantic-Guided Zero-Shot Learning for Low-Light Image/Video Enhancement 代码: https://github.com/ShenZheng2000/SemantiGuided-Low-Light-Image-Enhancement 在低光条件下增加亮度的一个可行方法是使用更高的ISO或更长时间…...

分享Python的十大库,这你一定得知道!
文章目录 前言关于Python技术储备一、Python所有方向的学习路线二、Python基础学习视频三、精品Python学习书籍四、Python工具包项目源码合集①Python工具包②Python实战案例③Python小游戏源码五、面试资料六、Python兼职渠道 前言 Python为我们提供了非常完善的基础库&#…...

react: hooks
useState useState的作用是是变量具有响应式,改变值页面可以同步变化 import { useState, useEffect } from "react";// 当前状态和一个让你更新它的函数 ; 参数为状态初始值 const [initLoading, setInitLoading] useState(true);// 任意地…...
Flink(二)【Flink 部署模式】
前言 今天是Flink学习的第二天,我的心情异常的复杂哈哈哈(苦笑),学习上还是比较顺利的,感情上我并不擅长,所以心情波动大在所难免。害,至少还有学习让我不被各种糟糕琐碎的日常生活里的人和事所…...

在使用ubuntu18.04的时候使用阿里源或者清华源后安装mysql5.7时出现dpkg提示的错误信息
在使用ubuntu18.04的时候使用阿里源或者清华源后安装mysql5.7时出现dpkg提示的错误信息 经过排查发现该问题可能跟本地库依赖文件导致mysql安装不上。 清除刚下载保留的mysql,然后删除、清除在更新本地依赖库。 sudo apt purge mysql* sudo apt autoremove sudo …...
和指针的区别)
引用(类名后加符号)和指针的区别
它们的区别: ①从现象上看, 指针在运行时可以改变其所指向的值, 而引用一旦和某个对象绑定后就不再改变。 这句话可以理解为: 指针可以被重新赋值以指向另一个不同的对象。 但是引用则总是指向在初始化时被指定的对象&#x…...

如何查看网站的https的数字证书
如题 打开Chrome浏览器,之后输入想要抓取https证书的网址,此处以知乎为例点击浏览器地址栏左侧的锁的按钮,如下图 点击“连接是安全的”选项,如下图 点击“证书有效”选项卡,如下图 查看基本信息和详细信息 点击详细信…...
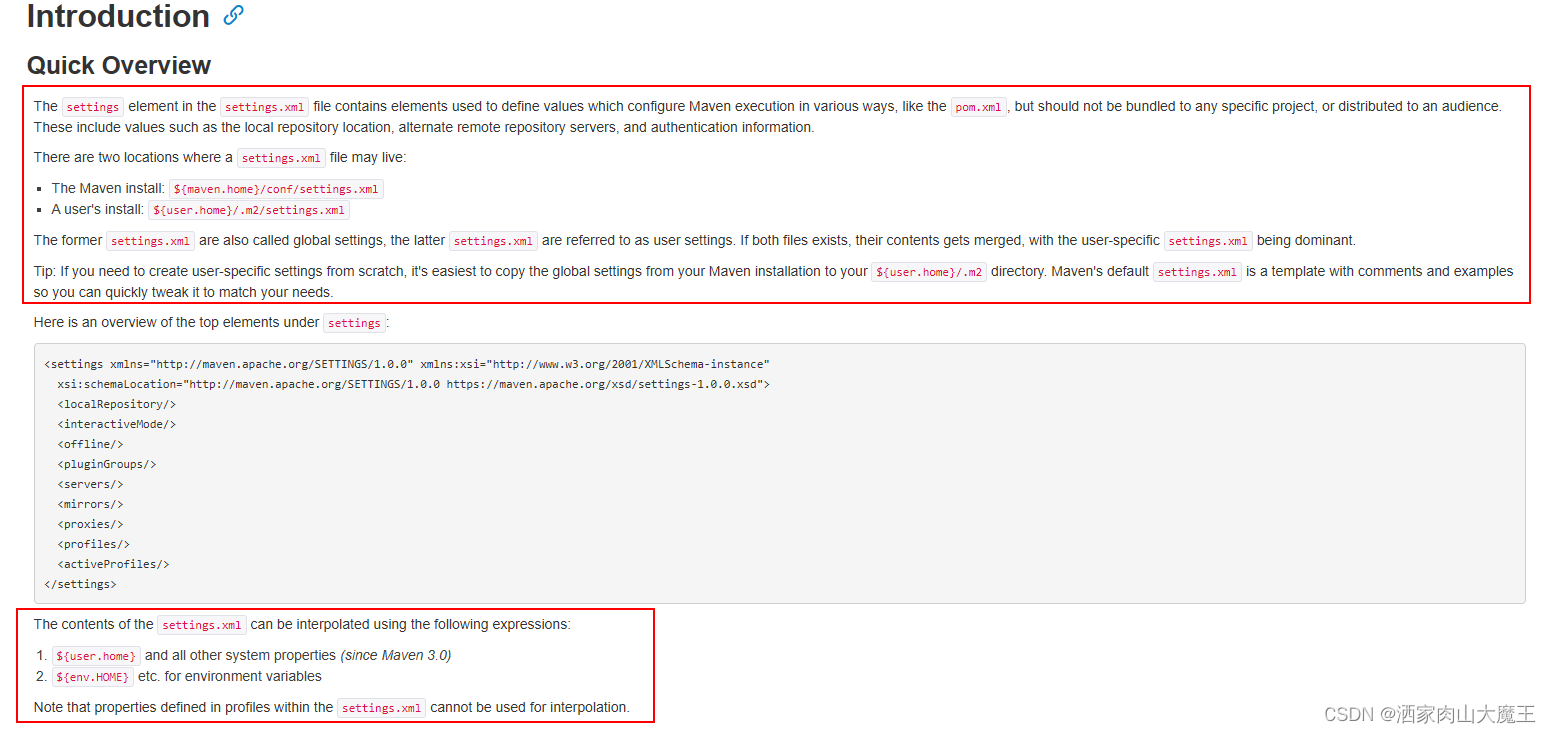
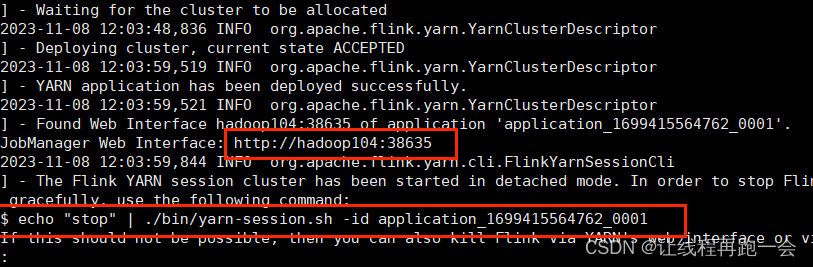
关于maven读取settings.xml文件的优先级问题
今天在IDEA中配置maven的setting.xml文件路径指向的.m2路径下的setting_a.xml文件,同时,我的maven3.6.3也放在.m2中。 [1] .m2文件夹 [2] apache-maven-3.6.3文件夹 然后,在IDEA中打包发布时发现,无论如何都读取不到指定的setti…...
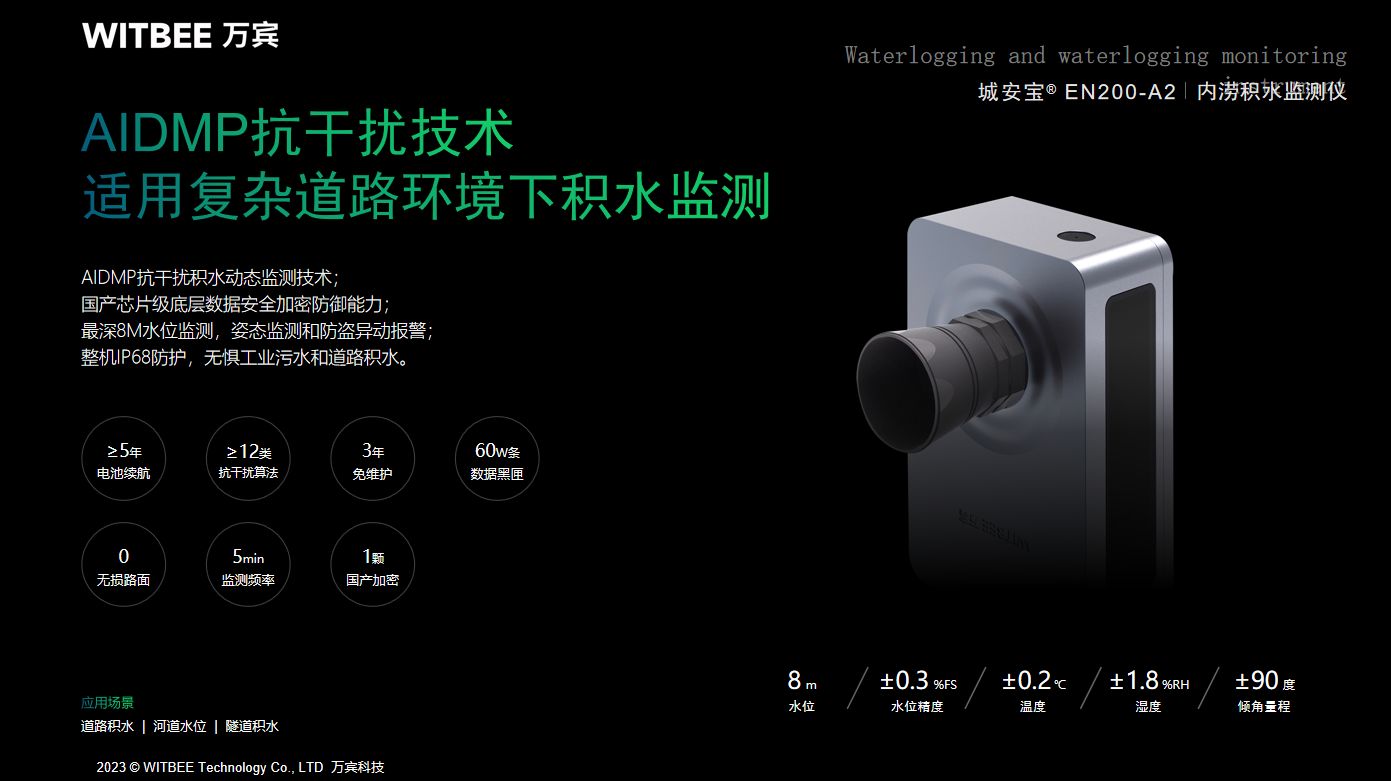
城市内涝积水监测,万宾科技内涝预警监测系统
每一个城市的排水体系都是一个复杂的网络系统,需要多个部分配合协调,预防城市排水管网带来安全隐患,也因此才能在一定程度上缓解城市内涝带来的安全问题。在海绵城市建设过程中不仅要解决大部分道路硬化导致的积水无法渗透等问题,…...
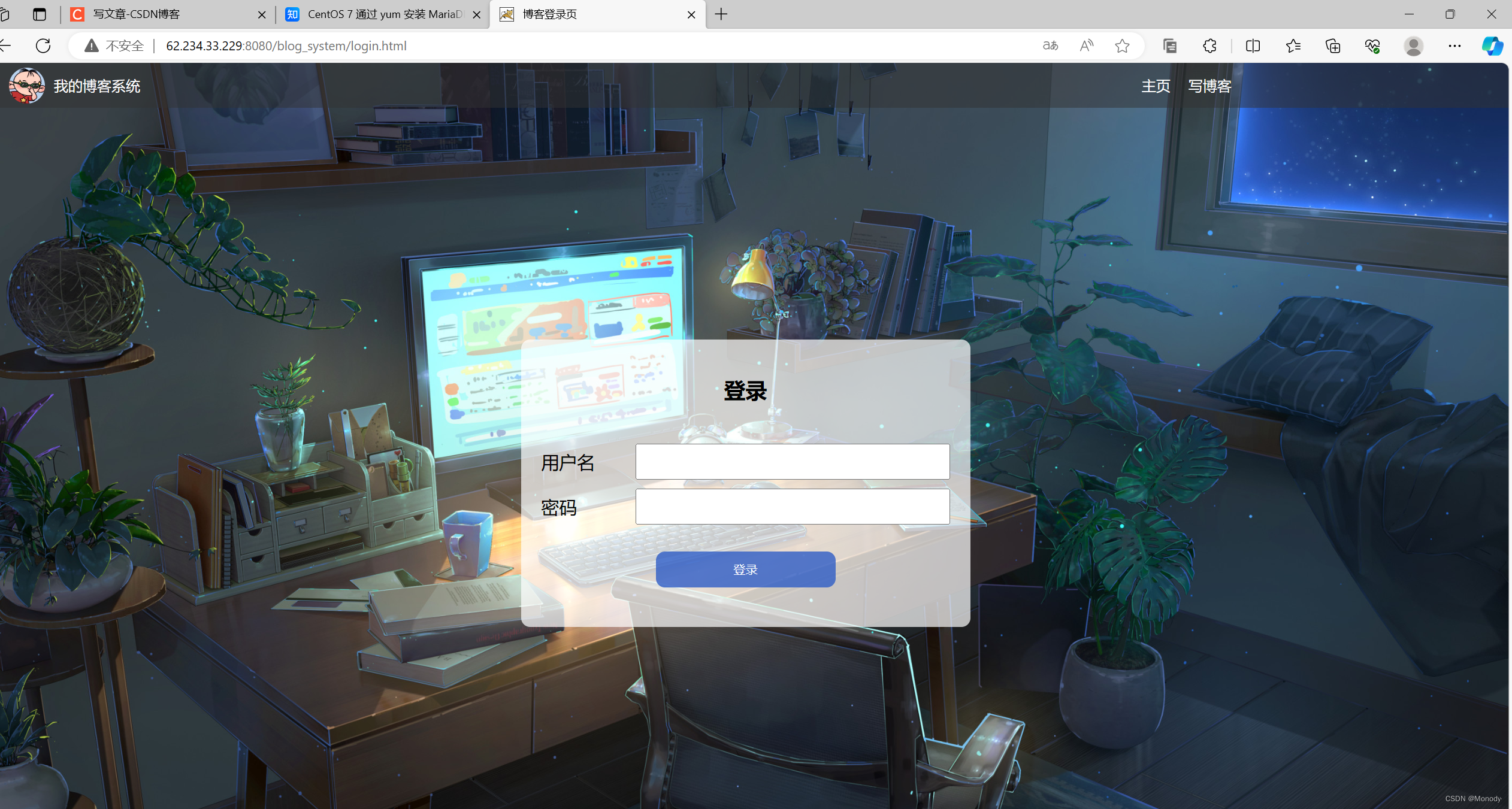
JavaEE初阶学习:Linux 基本使用和 web 程序部署
1.Linux的基本认识 Linux 是一个操作系统.(搞管理的系统) 和Windows都是同类产品~~ Linux 实际的场景: 1.服务器 2.嵌入式设备 3.移动端(手机)Android 其实就是Linux 1991年,还在读大学的 芬兰人 Linus Benedict Torvalds,搞了一个Linux 这样的系统0.01版,正式发布了~ 后…...
摔杯算法(要求用最少的测试次数找出恰巧会使杯子破碎的楼层。)
题目: 一种杯子,若在第N层被摔破,则在任何比N高的楼层均会破;若在第M层不破,则在任何比M低的楼层均不会破。给你两个这样的杯子,让你在100层高的楼层中测试,要求用最少的测试次数找出恰巧会使杯子破碎的楼层…...
)
如何在 Vite + React 项目中禁用自动热更新(HMR)
本文详解如何在 vite 开发服务器中彻底禁用热模块替换(hmr),避免长时间操作(如大文件上传、复杂计算)因页面自动刷新而中断进度,同时提供配置示例与关键注意事项。 本文详解如何在 vite 开发服务器中彻…...

头歌操作系统课后作业2.1
关卡2:终端1:cd ~/os/linux-0.11-lan:~/os/linux-0.11-lab# ./rungdb终端2:cp /data/workspace/myshixun/exp1/1.tgz ~/os:cd ~/os/linux-0.11-lab:~/os/linux-0.11-lab# tar -zxvf .. /1.tgz 1:~/os/linux-0.11-lab# rm -rf cur:~/os/linux-0.11-lab# ln -s 1 …...

YOLOFuse功能体验:多种融合策略,满足不同精度需求
YOLOFuse功能体验:多种融合策略,满足不同精度需求 1. 多模态目标检测的价值与挑战 在智能安防和自动驾驶领域,单一传感器已经难以满足全天候、全场景的检测需求。传统RGB摄像头在低光照、烟雾、雨雪等复杂环境下表现不佳,而红外…...

SQL窗口函数性能瓶颈排查_执行计划中的关键点
WindowAgg节点cost高或width异常(>1000字节)是性能问题首要信号,因窗口函数需缓存整分区数据,width大加重内存与磁盘压力,cost高常反映排序或物化代价被低估。看懂执行计划里 WindowAgg 节点的 cost 和 widthPostgr…...
了!Spark 3.0+ 中这几个隐藏的执行计划模式更实用)
别光会explain()了!Spark 3.0+ 中这几个隐藏的执行计划模式更实用
解锁Spark执行计划的隐藏模式:超越explain()的高级调试技巧 当你在Spark作业遇到性能瓶颈时,是否还在反复查看基础explain()输出却找不到头绪?作为数据工程师,我们常常陷入这样的困境:明明知道执行计划很重要ÿ…...

【Spring Boot 4.0 Agent-Ready 架构终极指南】:20年架构师亲授生产级字节码增强实战秘技
第一章:Spring Boot 4.0 Agent-Ready 架构全景认知Spring Boot 4.0 首次将 JVM Agent 集成能力深度融入核心启动生命周期,标志着可观测性、安全增强与运行时治理从“可选插件”跃迁为“原生契约”。Agent-Ready 并非仅指支持 Java Agent 加载,…...
)
【会议征稿通知 | 中南大学主办 | IEEE出版 | EI 、Scopus稳定检索】第七届计算机视觉、图像与深度学习国际学术会议(CVIDL 2026)
第七届计算机视觉、图像与深度学习国际学术会议(CVIDL 2026) 2026 7th International Conference on Computer Vision, Image and Deep Learning 2026年5月22-24日 | 中国-长沙 大会官网 : www.cvidl.org 截稿时间:见官网&…...
)
TOOLS.md 机制详解( 代码级解析)
TOOLS.md 机制详解 基于 OpenClaw 源码分析 代码级解析 最后更新:2026-04-20 🎯 核心结论 TOOLS.md 不控制工具可用性,它只是用户指南。 在 src/agents/system-prompt.ts 中,系统明确标注: “TOOLS.md does not control tool availability; it is user guidance for how…...

如何构建层次化任务体系:Tasks子任务管理的终极指南
如何构建层次化任务体系:Tasks子任务管理的终极指南 【免费下载链接】tasks Bringing Astrid Tasks back from the dead 项目地址: https://gitcode.com/gh_mirrors/ta/tasks Tasks是一款开源任务管理应用,旨在帮助用户高效组织和管理日常任务。本…...
:在网络波动环境下维持 React 状态与服务端最终一致性)
React 乐观更新(Optimistic UI):在网络波动环境下维持 React 状态与服务端最终一致性
欢迎来到“乐观 UI”的游乐场:如何在网络波动中假装一切都很完美大家好,我是你们的老朋友,一个在 React 深渊里摸爬滚打多年的资深工程师。今天我们不聊那些虚头巴脑的架构图,也不谈什么微前端、Serverless,咱们来聊点…...