STM32-HAL库09-CAN通讯(loopback模式)
一、所用材料:
STM32F103C6T6最小系统板
STM32CUBEMX(HAL库软件)
MDK5
串口调试助手
二、所学内容:
初步学习如何使用STM32的CAN通讯功能,在本章节主要达到板内CAN通讯的效果,即32发送CAN信息再在CAN接收中断中用串口打印出来。
三、CUBEMX配置:
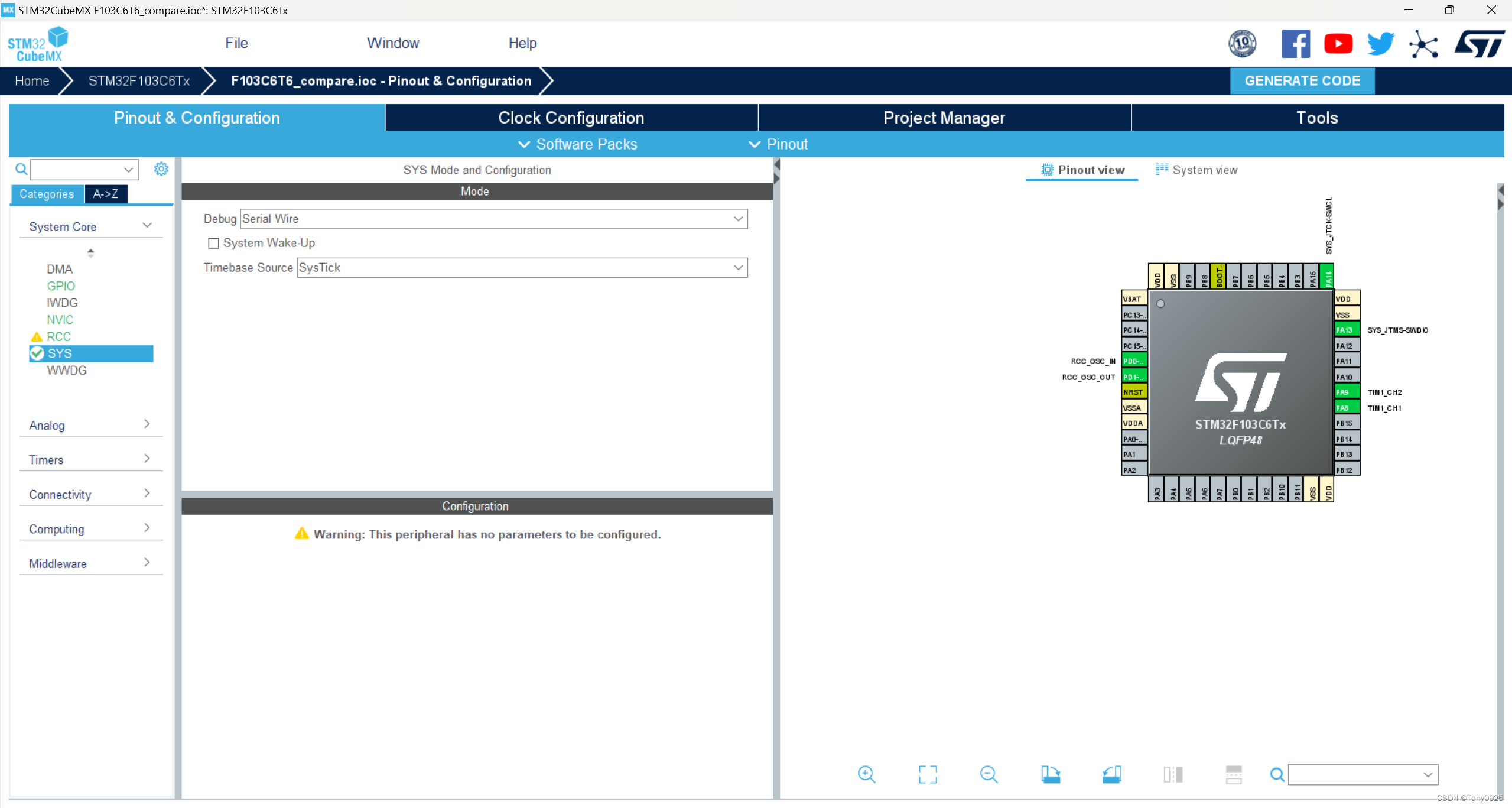
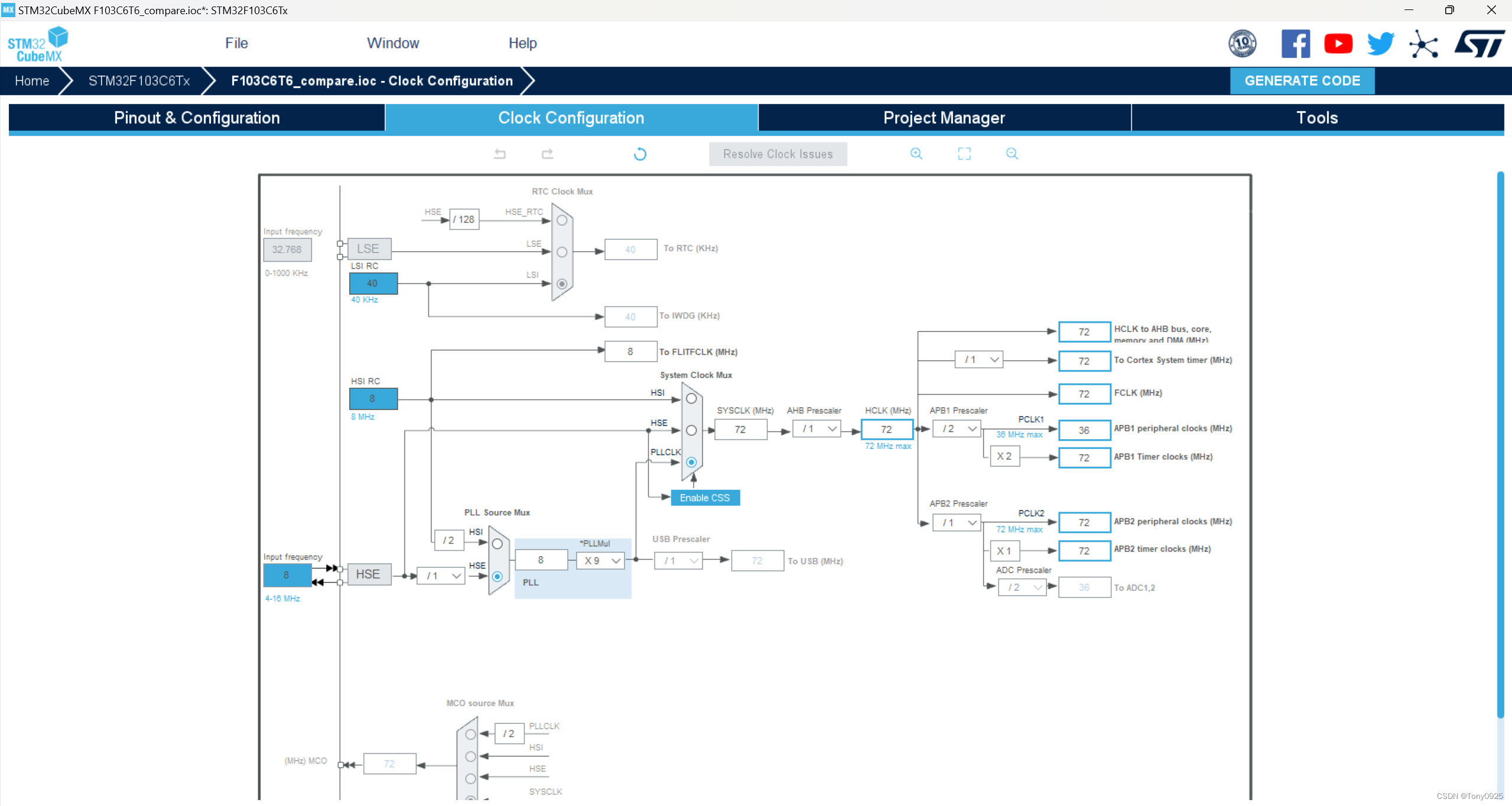
第一步:老三件套-RCC,SYS,时钟树配置

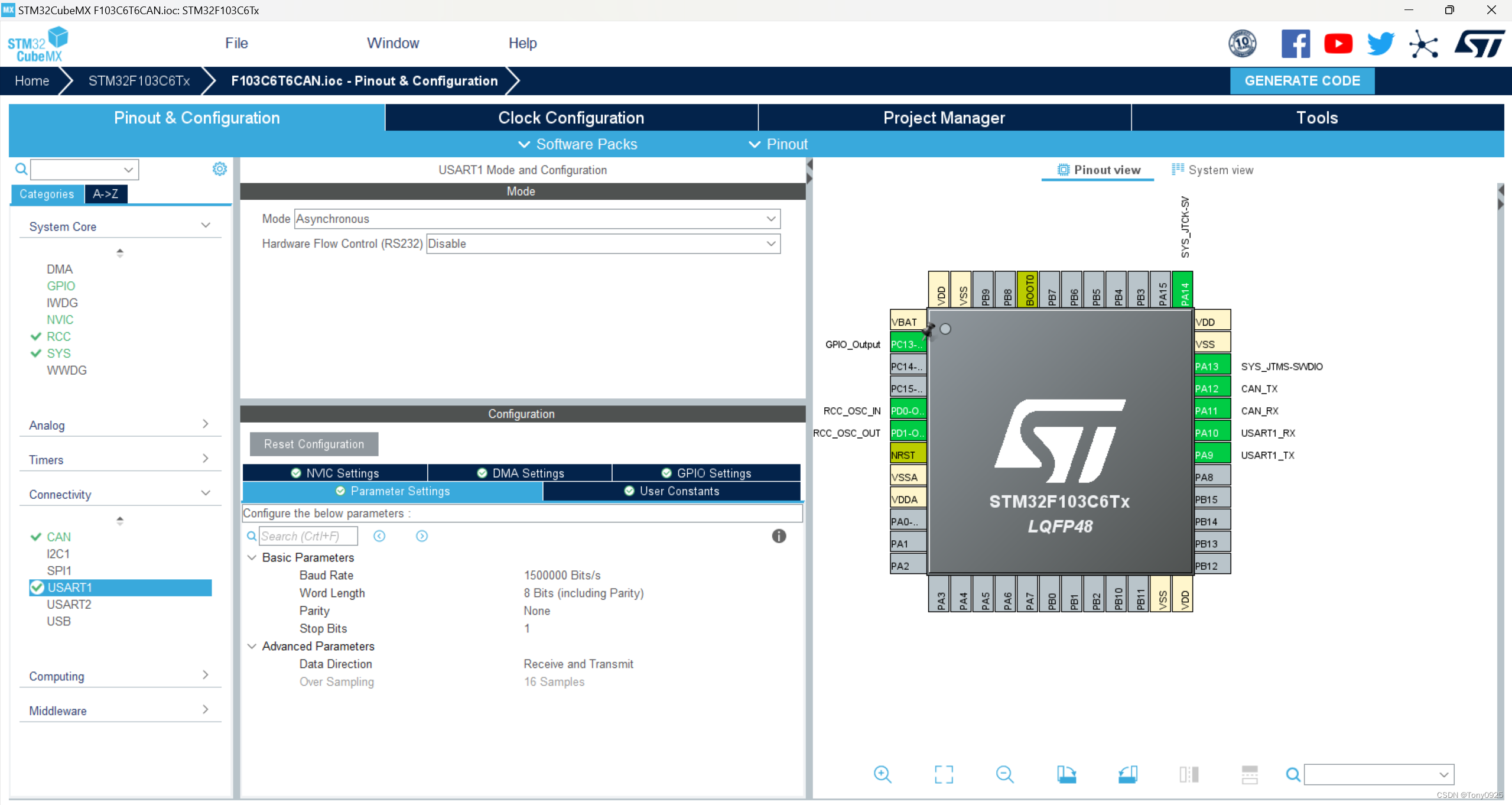
第二步:串口配置
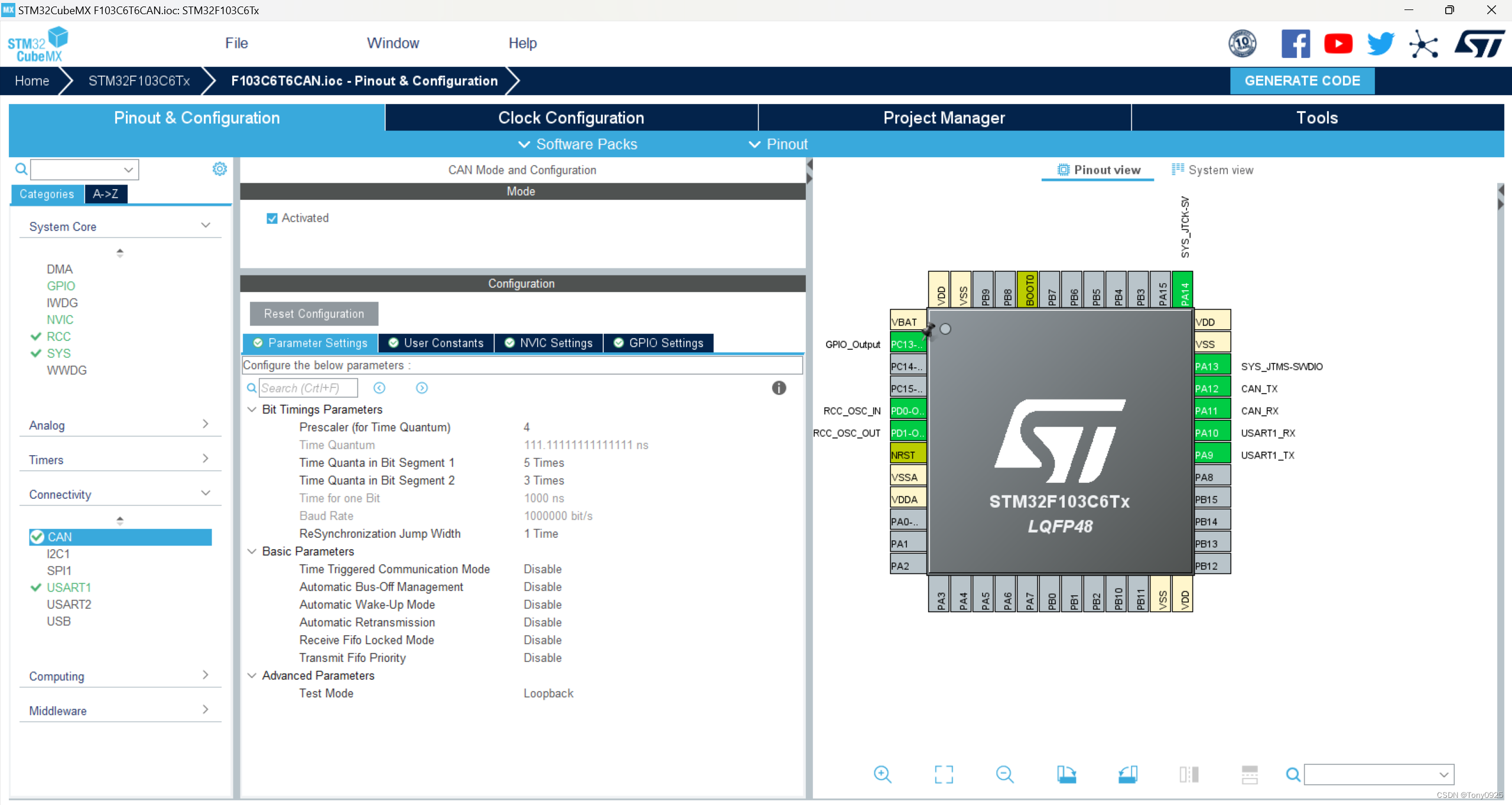
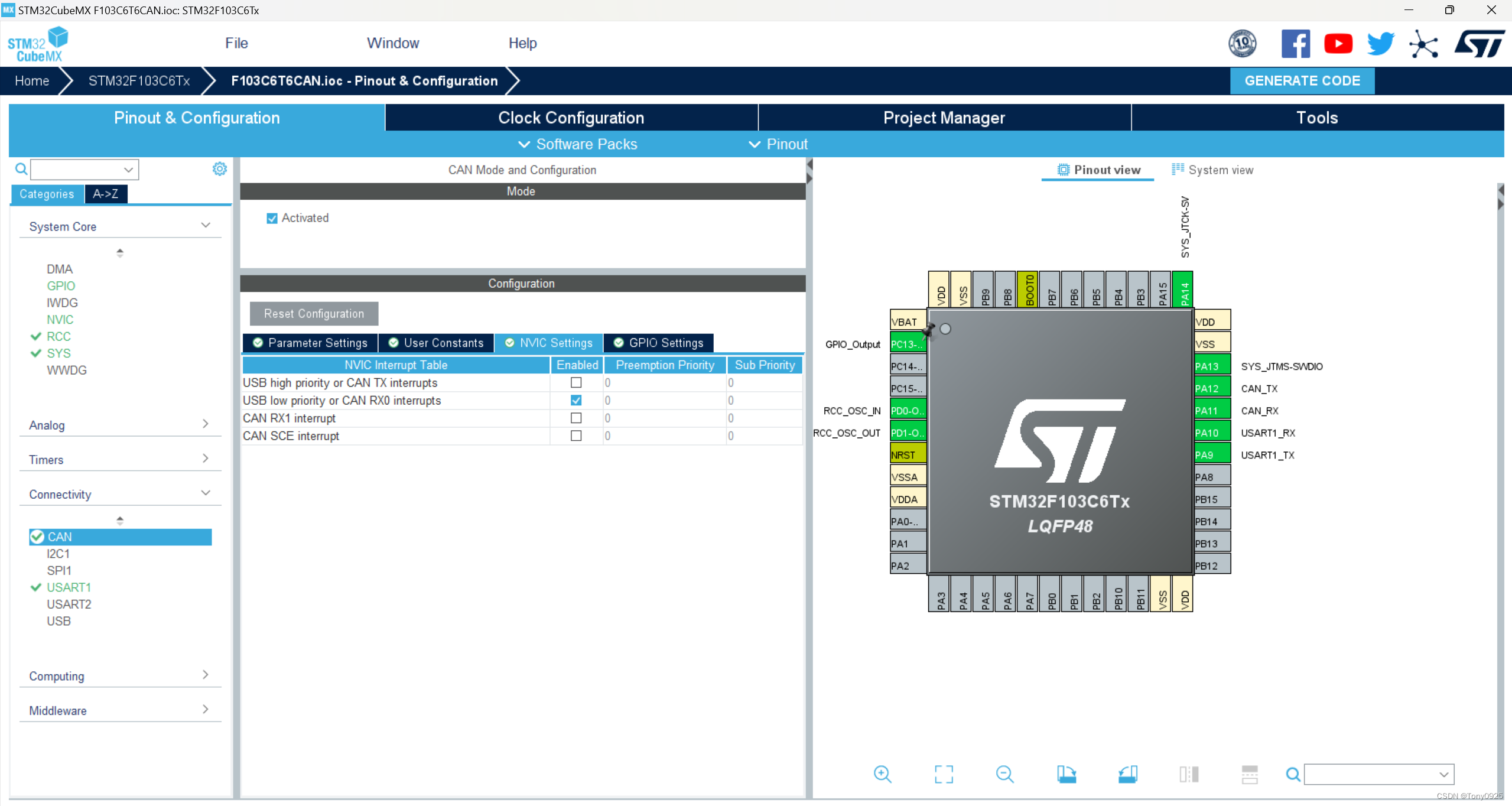
第三步:CAN配置
关键步骤:
- 波特率设置:1M bit/s,具体配置如下图
- TEST MODE - Loopback
- 打开接收中断RX0
四、MDK5配置:
一、can.h头文件配置
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __CAN_H__
#define __CAN_H__#ifdef __cplusplus
extern "C" {
#endif/* Includes ------------------------------------------------------------------*/
#include "main.h"/* USER CODE BEGIN Includes *//* USER CODE END Includes */extern CAN_HandleTypeDef hcan;/* USER CODE BEGIN Private defines *//* USER CODE END Private defines */void MX_CAN_Init(void);/* USER CODE BEGIN Prototypes */
void CANFilter_Config(void);
void CAN1_Send_Test(void);
void CAN_Start_Init(void);
void CAN1_Send(uint8_t* cdata);
/* USER CODE END Prototypes */#ifdef __cplusplus
}
#endif#endif /* __CAN_H__ */二、can.c源文件配置
/* Includes ------------------------------------------------------------------*/
#include "can.h"/* USER CODE BEGIN 0 */
#include "stdio.h"
#include "usart.h"
#include "main.h"
static CAN_TxHeaderTypeDef TxMessage; //CAN发送的消息的消息头
static CAN_RxHeaderTypeDef RxMessage; //CAN接收的消息的消息头
/* USER CODE END 0 */CAN_HandleTypeDef hcan;/* CAN init function */
void MX_CAN_Init(void)
{hcan.Instance = CAN1;hcan.Init.Prescaler = 4;hcan.Init.Mode = CAN_MODE_LOOPBACK;hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;hcan.Init.TimeSeg1 = CAN_BS1_5TQ;hcan.Init.TimeSeg2 = CAN_BS2_3TQ;hcan.Init.TimeTriggeredMode = DISABLE;hcan.Init.AutoBusOff = DISABLE;hcan.Init.AutoWakeUp = DISABLE;hcan.Init.AutoRetransmission = DISABLE;hcan.Init.ReceiveFifoLocked = DISABLE;hcan.Init.TransmitFifoPriority = DISABLE;if (HAL_CAN_Init(&hcan) != HAL_OK){Error_Handler();}/* USER CODE BEGIN CAN_Init 2 *//* USER CODE END CAN_Init 2 */}void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(canHandle->Instance==CAN1){/* USER CODE BEGIN CAN1_MspInit 0 *//* USER CODE END CAN1_MspInit 0 *//* CAN1 clock enable */__HAL_RCC_CAN1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/**CAN GPIO ConfigurationPA11 ------> CAN_RXPA12 ------> CAN_TX*/GPIO_InitStruct.Pin = GPIO_PIN_11;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_12;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* CAN1 interrupt Init */HAL_NVIC_SetPriority(USB_LP_CAN1_RX0_IRQn, 0, 0);HAL_NVIC_EnableIRQ(USB_LP_CAN1_RX0_IRQn);/* USER CODE BEGIN CAN1_MspInit 1 *//* USER CODE END CAN1_MspInit 1 */}
}void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{if(canHandle->Instance==CAN1){/* USER CODE BEGIN CAN1_MspDeInit 0 *//* USER CODE END CAN1_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_CAN1_CLK_DISABLE();/**CAN GPIO ConfigurationPA11 ------> CAN_RXPA12 ------> CAN_TX*/HAL_GPIO_DeInit(GPIOA, GPIO_PIN_11|GPIO_PIN_12);/* CAN1 interrupt Deinit */HAL_NVIC_DisableIRQ(USB_LP_CAN1_RX0_IRQn);/* USER CODE BEGIN CAN1_MspDeInit 1 *//* USER CODE END CAN1_MspDeInit 1 */}
}/* USER CODE BEGIN 1 */
/*******************
接受信息过滤器
*******************/void CANFilter_Config(void)
{CAN_FilterTypeDef sFilterConfig;sFilterConfig.FilterBank = 0; //CAN过滤器编号,范围0-27sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //CAN过滤器模式,掩码模式或列表模式sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; //CAN过滤器尺度,16位或32位sFilterConfig.FilterIdHigh = 0x000 << 5; //32位下,存储要过滤ID的高16位sFilterConfig.FilterIdLow = 0x0000; //32位下,存储要过滤ID的低16位sFilterConfig.FilterMaskIdHigh = 0x0000; //掩码模式下,存储的是掩码sFilterConfig.FilterMaskIdLow = 0x0000;sFilterConfig.FilterFIFOAssignment = 0; //报文通过过滤器的匹配后,存储到哪个FIFOsFilterConfig.FilterActivation = ENABLE; //激活过滤器sFilterConfig.SlaveStartFilterBank = 0;if (HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK) {Error_Handler();}else{ printf("HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) is HAL_OK\r\n"); }
}
/*******************
中断接受
*******************/
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
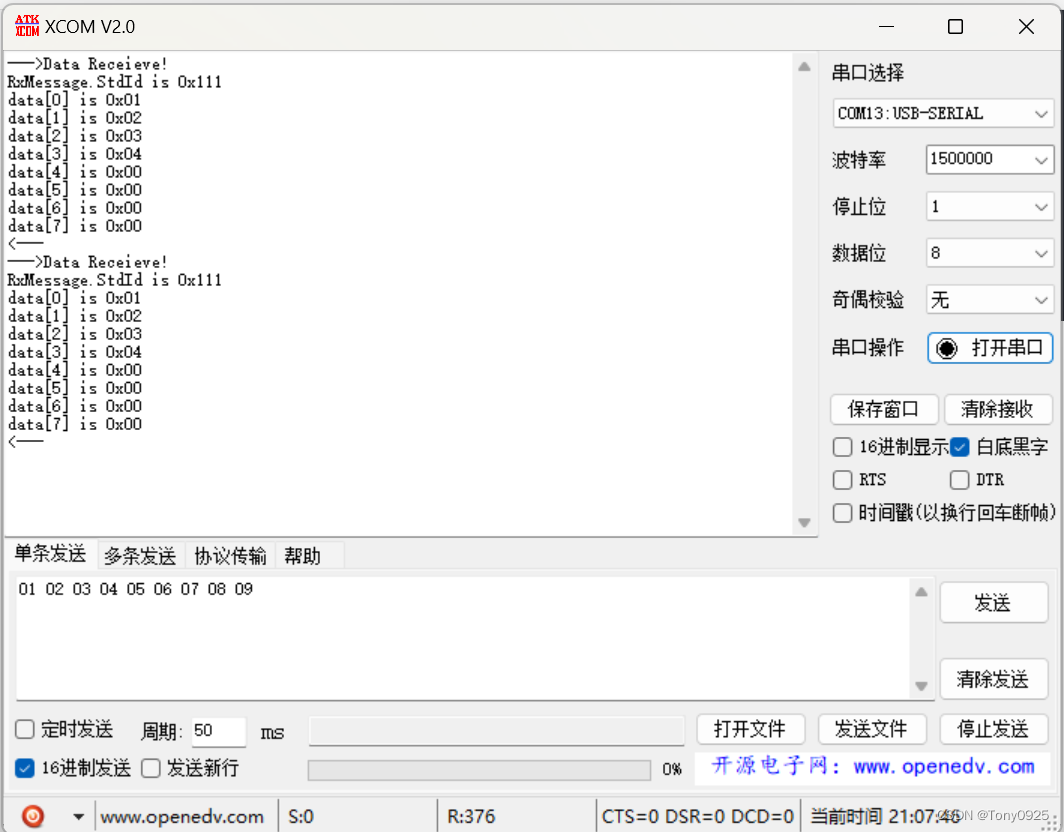
{uint8_t data[8];HAL_StatusTypeDef status;status = HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxMessage, data);if (HAL_OK == status){ printf("--->Data Receieve!\r\n");printf("RxMessage.StdId is %#x\r\n", RxMessage.StdId);printf("data[0] is 0x%02x\r\n", data[0]);printf("data[1] is 0x%02x\r\n", data[1]);printf("data[2] is 0x%02x\r\n", data[2]);printf("data[3] is 0x%02x\r\n", data[3]);printf("data[4] is 0x%02x\r\n", data[4]);printf("data[5] is 0x%02x\r\n", data[5]);printf("data[6] is 0x%02x\r\n", data[6]);printf("data[7] is 0x%02x\r\n", data[7]); printf("<---\r\n"); HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); }
}/*******************
发送函数
*******************/
void CAN1_Send_Test(void)
{uint32_t TxMailbox;uint8_t data[4] = {0x01, 0x02, 0x03, 0x04};TxMessage.IDE = CAN_ID_STD; //设置ID类型TxMessage.StdId = 0x111; //设置ID号TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧TxMessage.DLC = 4; //设置数据长度if (HAL_CAN_AddTxMessage(&hcan, &TxMessage, data, &TxMailbox) != HAL_OK){Error_Handler();} // else{ printf("HAL_CAN_AddTxMessage(&hcan, &TxMessage, data, &TxMailbox) is HAL_OK\r\n"); }
}void CAN1_Send(uint8_t* cdata)
{uint32_t TxMailbox;TxMessage.IDE = CAN_ID_STD; //设置ID类型TxMessage.StdId = 0x111; //设置ID号TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧TxMessage.DLC = 8; //设置数据长度 if (HAL_CAN_AddTxMessage(&hcan, &TxMessage, cdata, &TxMailbox) != HAL_OK){Error_Handler();}
}
/*******************
CAN启动函数
*******************/
void CAN_Start_Init(void)
{if (HAL_CAN_Start(&hcan) != HAL_OK) {Error_Handler();}else{ printf("HAL_CAN_Start(&hcan) is HAL_OK\r\n"); }/* 3. Enable CAN RX Interrupt */if (HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK) {Error_Handler();}else{ printf("HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING) is HAL_OK\r\n"); }
}
/* USER CODE END 1 */三、main.c文件配置
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_CAN_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */CANFilter_Config();CAN_Start_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){CAN1_Send_Test();HAL_Delay(1000);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}
四、串口打印结果:
五、本文对应代码分享:
https://download.csdn.net/download/qq_45854134/88522530
相关文章:
STM32-HAL库09-CAN通讯(loopback模式)
一、所用材料: STM32F103C6T6最小系统板 STM32CUBEMX(HAL库软件) MDK5 串口调试助手 二、所学内容: 初步学习如何使用STM32的CAN通讯功能,在本章节主要达到板内CAN通讯的效果,即32发送CAN信息再在CAN接收…...
jsvascript使用dhtmlXTreeObject的loadJSONObject绘制目录树
文章目录 1,引入dhtmlXTreeObject的css和js文件2,创建一棵目录树2.1,let tree new dhtmlXTreeObject(id-dhtmltree-0, "100%", "100%", 0);2.2,设置图片根目录(后续使用到的图片都是相对于该目录…...
LeetCode 17. 电话号码的字母组合 中等
题目 - 点击直达 1. 17. 电话号码的字母组合 中等1. 题目详情1. 原题链接2. 题目要求3. 基础框架 2. 解题思路1. 思路分析2. 时间复杂度3. 代码实现 3. 知识与收获 1. 17. 电话号码的字母组合 中等 1. 题目详情 1. 原题链接 LeetCode 17. 电话号码的字母组合 中等 2. 题目要…...

《GPT与AI助手:技术进步与就业前景》
随着人工智能的迅速发展,像GPT(Generative Pre-trained Transformer)这样的自然语言处理技术已经广泛应用于各个领域,各个互联网公司也纷纷推出了自己的AI助手来帮助创作、交流和解决问题。这一技术的广泛应用引发了一系列关于就业…...
线性代数 | 矩阵运算 加减 数乘 矩阵的幂运算
文章目录 1 矩阵加减和数乘2 矩阵与矩阵的乘法2.1 相乘条件:看中间,取两头2.2 相乘计算方法 3 矩阵的幂3.1 观察归纳法3.2 邻项相消法3.3 化为对角 4 判断是否可逆(证明题或者要求求出逆矩阵)4.1 直接观察4.2 由定义式推得4.2.1 待…...

Linux---(五)三大工具yum、vim、gcc/g++
文章目录 一、yum工具1.Linux中安装软件的方法:2.什么是yum?3.yum源更新 二、Linux编辑器--vim1.IDE例子2.vim(1)vim的常用模式及切换模式(2)底层模式常用命令(3)插入模式常用命令(…...
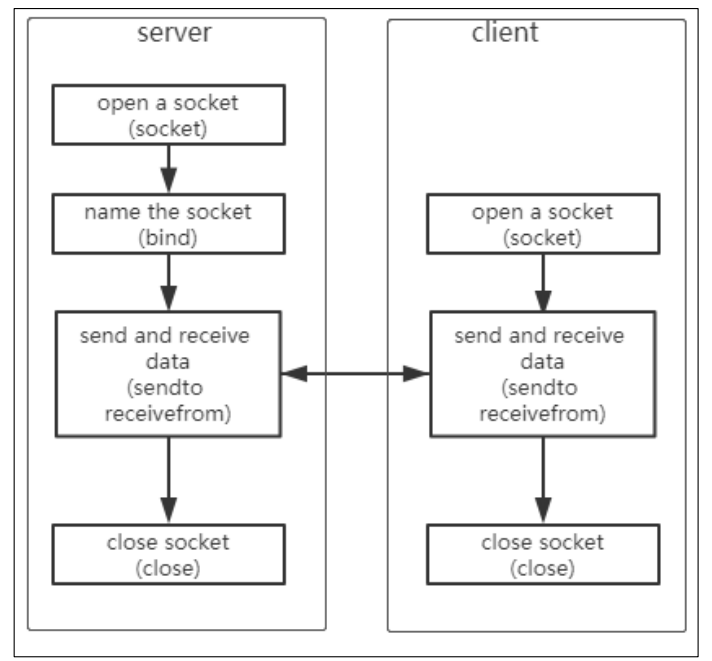
网络通信TCP、UDP详解
目录 IP 和端口 网络传输中的 2 个对象:server 和 client 两种传输方式:TCP/UDP TCP 和 UDP 原理上的区别 为何存在 UDP 协议 TCP/UDP 网络通信大概交互图 IP 和端口 所有的数据传输,都有三个要素 :源、目的、长度。 怎么表…...
Flutter笔记:绘图示例 - 一个简单的(Canvas )时钟应用
Flutter笔记 绘图示例 - 一个简单的(Canvas )时钟应用 作者:李俊才 (jcLee95):https://blog.csdn.net/qq_28550263 邮箱 :291148484163.com 本文地址:https://blog.csdn.net/qq_2855…...

Bard和ChatGPT的一些比较
Bard和ChatGPT的一些比较 2023.11.8版权声明:本文为博主chszs的原创文章,未经博主允许不得转载。 选择正确的自动文本生成工具对企业至关重要。本文将详细分析谷歌 Bard 和 ChatGPT 的优缺点,以帮助企业做出明智的选择。无论企业关注的是客…...
centos7安装Nexus(Maven私服)与配置使用教程
之前有位大佬问我,他说有个第三方的Jar包,在idea导出库中使用,现在要部署上线测试,要如何导进去打包。 我说,不用那么麻烦,搞个Nexus私服,将Jar上传上去,然后配置Maven的setting文件…...

Azure 机器学习 - 有关为 Azure 机器学习配置 Kubernetes 群集的参考
目录 受支持的 Kubernetes 版本和区域建议的资源计划ARO 或 OCP 群集的先决条件禁用安全增强型 Linux (SELinux)ARO 和 OCP 的特权设置 收集的日志详细信息Azure 机器学习作业与自定义数据存储连接支持的 Azure 机器学习排斥和容许最佳实践 通过 HTTP 或 HTTPS 将其他入口控制器…...
使用微信小程序控制蓝牙小车(微信小程序端)
目录 使用接口界面效果界面设计界面逻辑设计 使用接口 微信小程序官方开发文档 接口说明wx.openBluetoothAdapter初始化蓝牙模块wx.closeBluetoothAdapter关闭蓝牙模块(调用该方法将断开所有已建立的连接并释放系统资源)wx.startBluetoothDevicesDiscovery开始搜寻附近的蓝牙…...

【react hook】react hook组件中,在forEach中使用async/awati进行异步操作,为什么后面代码没有等待直接同步运行了呢?
这是因为 forEach 方法不会等待 async/await 异步操作的完成。forEach 方法是一种同步的方法,它会在每个迭代内部同步执行一个回调函数。当遇到 await 时,会立即暂停执行,但是 forEach 方法不会等待回调函数中的 await 异步操作完成ÿ…...
高斯过程回归 | GPR高斯过程回归
高斯过程回归(Gaussian Process Regression, GPR)是一种强大的非参数回归方法,它通过假设数据是从一个高斯过程中生成的来预测新的数据点。 高斯过程是一种定义在连续输入空间上的随机过程,其中任何有限集合的观测值都呈多变量高斯分布。 实现GPR的Python代码import numpy …...
[autojs]逍遥模拟器和vscode对接
第一步:启动autojs服务 第二步:去cmd查看ip地址,输入ipconfig 第三步:打开逍遥模拟器中的sutojs-左上角- 连接电脑,然后输入WLAN或者其他ip也行,根据自己电脑实际情况确认 此时vscode显示连接成功。我们写…...

Docker 安装与优化
一、安装Docker 1、关闭防火墙 systemctl stop firewalld systemctl disable firewalld setenforce 02、安装依赖包 yum -y install yum-utils device-mapper-persistent-data lvm2#解释 yum-utils #提供了yum-config-manager工具 device mapper #是linux内核中支持逻辑卷…...
Wix使用velo添加Google ads tag并在form表单提交时向谷歌发送事件
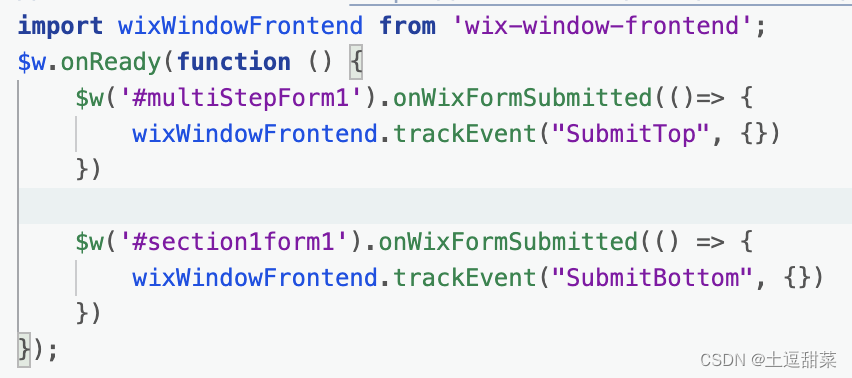
往head里加代码时,不能看谷歌的代码,要看wix的代码,不然必定踩坑 https://support.wix.com/en/article/tracking-google-ads-conversions-using-wix-custom-code 这里的代码才对,因为wix搞了个velo,这个velo很傻x&am…...
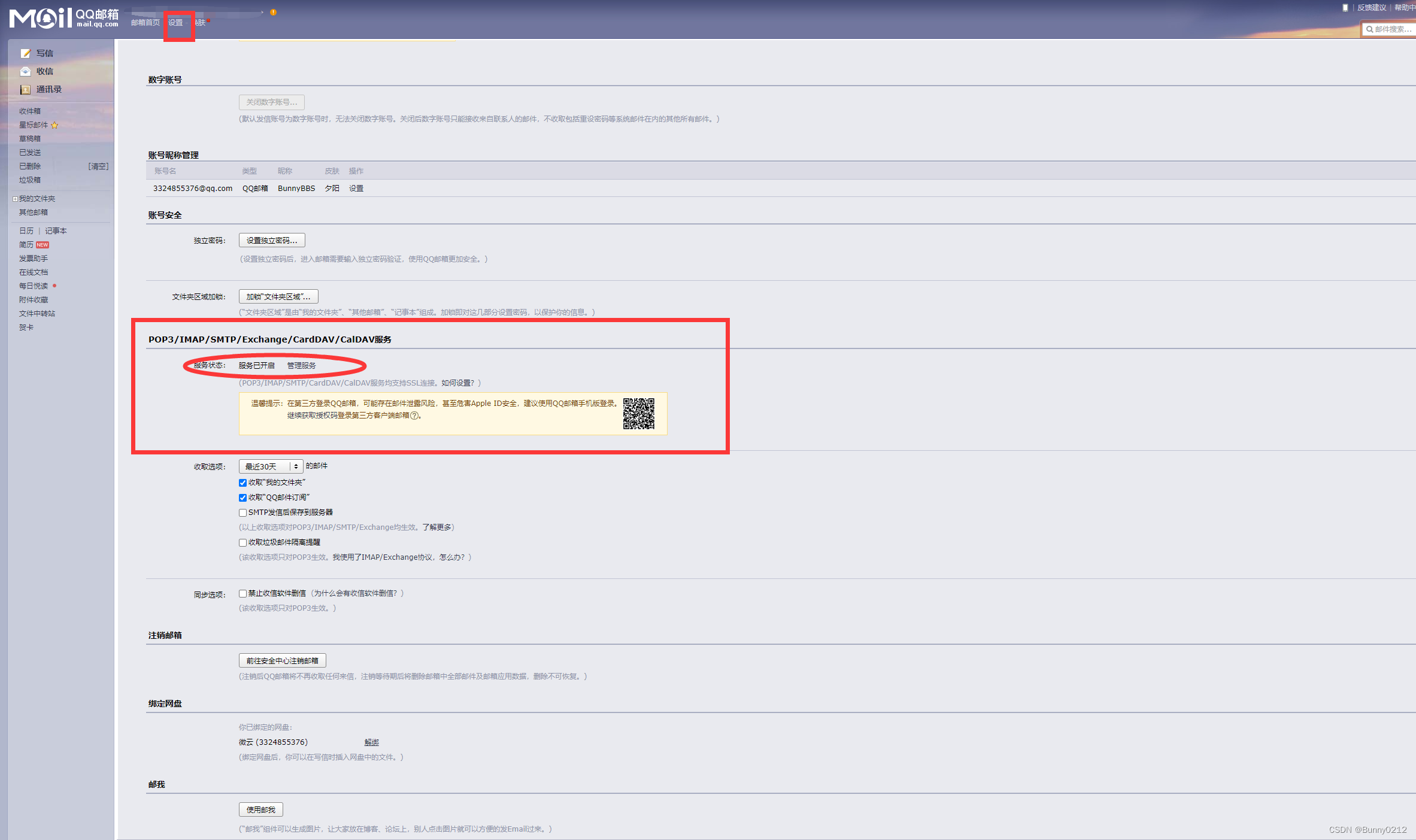
Centos配置邮件发送
在CentOS Linux上配置邮件发送 在这个指南中,我们将讨论如何配置CentOS Linux系统以通过外部邮件服务器发送电子邮件,使用自己的邮件账户进行发送。 第一步:开启SMTP授权码 首先,我们以QQ邮箱为例,需要开启SMTP授权…...

Ubuntu系统使用apt-get管理软件工具
记录一下使用Ubuntu系统的apt-get管理软件工具 先查看一下系统的版本,可以看到这里使用的是Ubuntu20.04版本,版本代号focal rootmyw:~# uname -a Linux myw 5.4.0-70-generic #78-Ubuntu SMP Fri Mar 19 13:29:52 UTC 2021 x86_64 x86_64 x86_64 GNU/L…...
带你走进Cflow (三)·控制符号类型分析
目录 编辑 1、控制符号类型 1.1 语法类 1.2 符号别名 1.3 GCC 初始化 1、控制符号类型 有人也许注意到了输出中奇怪的现象:函数_exit 丢失了,虽然它在源文件中被printdir 调用了两次。这是因为默认情况下 cflow 忽略所有的一下划线开头的符号…...

2026指纹浏览器性能优化实战:多开稳定性与资源占用控制全解析
在 2026 年多账号规模化运营场景中,指纹浏览器的多开稳定性与资源占用控制,已成为影响运营效率的核心因素。无论是跨境电商的数十个店铺同步运营,还是社媒矩阵的上百个账号日常维护,抑或是数据采集的批量环境部署,都对…...

海思3516a OSD水印进阶:动态更新、多区域叠加与性能优化心得
海思3516a OSD水印进阶:动态更新、多区域叠加与性能优化实战 在嵌入式视频处理领域,OSD(On-Screen Display)水印功能早已超越简单的静态文字叠加,成为智能设备中不可或缺的信息交互层。当我们面对安防摄像头需要实时更…...

Bruno Simon Folio 2019音效设计:终极空间音频与交互反馈指南
Bruno Simon Folio 2019音效设计:终极空间音频与交互反馈指南 【免费下载链接】folio-2019 项目地址: https://gitcode.com/gh_mirrors/fo/folio-2019 Bruno Simon Folio 2019是一个融合视觉与听觉体验的创新项目,其音效设计系统通过精准的交互反…...
)
别再死磕理论了!用PCL+KinectFusion手把手教你从照片到3D模型(保姆级避坑指南)
从零实现3D建模:基于PCL与KinectFusion的实战避坑手册 当我在研究生实验室第一次尝试用Kinect扫描物体生成3D模型时,连续三天的环境配置失败几乎让我放弃。直到发现那个被埋没在GitHub issue里的OpenCL驱动解决方案,才明白三维重建的入门门槛…...

Dify合规问答配置失效真相:3家持牌机构被罚案例背后的2个底层配置逻辑漏洞
第一章:Dify合规问答配置失效真相:3家持牌机构被罚案例背后的2个底层配置逻辑漏洞近期,银保监会通报的三起AI问答系统违规事件中,涉事机构均使用Dify搭建面向公众的金融知识问答服务,但其“敏感词拦截”与“答案溯源强…...

百度网盘下载加速全攻略:3步解锁满速下载的免费开源方案
百度网盘下载加速全攻略:3步解锁满速下载的免费开源方案 【免费下载链接】baidupcs-web 项目地址: https://gitcode.com/gh_mirrors/ba/baidupcs-web 还在为百度网盘下载速度慢如蜗牛而烦恼吗?每次下载大文件都需要花费数小时甚至更长时间&#…...

如何用Audio Slicer让音频智能分段变得简单高效
如何用Audio Slicer让音频智能分段变得简单高效 【免费下载链接】audio-slicer A simple GUI application that slices audio with silence detection 项目地址: https://gitcode.com/gh_mirrors/aud/audio-slicer 你是否曾经面对长达数小时的音频文件,需要手…...

如何在网页中实现BIM模型可视化:web-ifc-three项目实战指南
如何在网页中实现BIM模型可视化:web-ifc-three项目实战指南 【免费下载链接】web-ifc-three The official IFC Loader for Three.js. 项目地址: https://gitcode.com/gh_mirrors/we/web-ifc-three 当建筑设计师、工程师或项目经理需要在网页端查看和交互BIM模…...

终极鼠标增强方案:Mac Mouse Fix让你的普通鼠标在macOS上超越苹果触控板
终极鼠标增强方案:Mac Mouse Fix让你的普通鼠标在macOS上超越苹果触控板 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 还在为macO…...

Display Driver Uninstaller终极指南:5分钟彻底解决显卡驱动冲突问题
Display Driver Uninstaller终极指南:5分钟彻底解决显卡驱动冲突问题 【免费下载链接】display-drivers-uninstaller Display Driver Uninstaller (DDU) a driver removal utility / cleaner utility 项目地址: https://gitcode.com/gh_mirrors/di/display-driver…...