“基于RflySim平台飞控底层算法开发”系列专题培训 (第三期)
>> RflySim平台系列专题培训
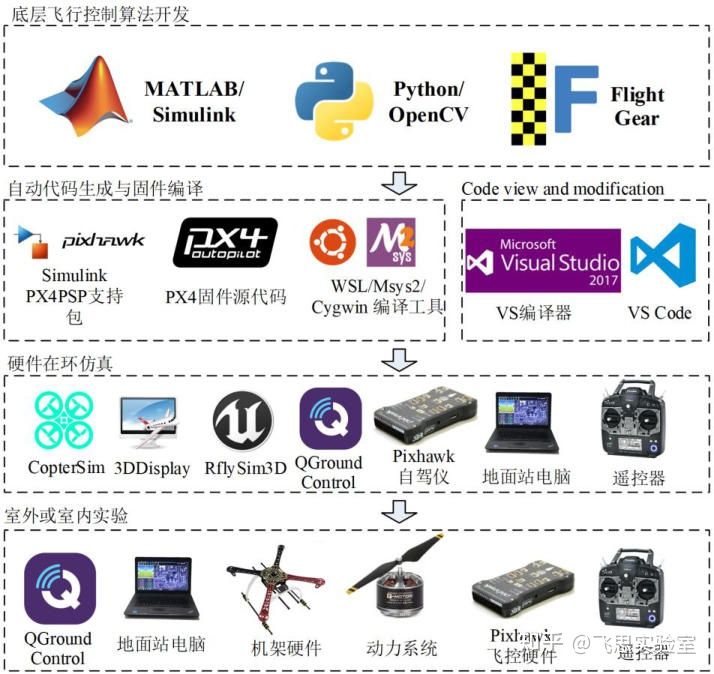
RflySim平台是一个生态系统或工具链(官网:https://doc.rflysim.com),发起于北航可靠飞行控制研究组,主要用于遵循基于模型设计的思想进行无人系统的控制和安全测试。本平台选择MATLAB/Simulink作为控制核心编程平台,将基于模型的设计(Model-Based Design, MBD)理念中的需求追溯、充分仿真验证与自动代码生成等技术,应用到控制系统的底层控制、中层安全决策和顶层视觉集群与人工智能等算法开发过程中。
本次培训的主题为“基于RflySim平台飞控底层算法开发”,后续此类培训课程会1~2月开展一次,敬请各位持续关注!!!
往期RflySim平台飞控底层控制开发培训宣传视频
一. 可学到的技能
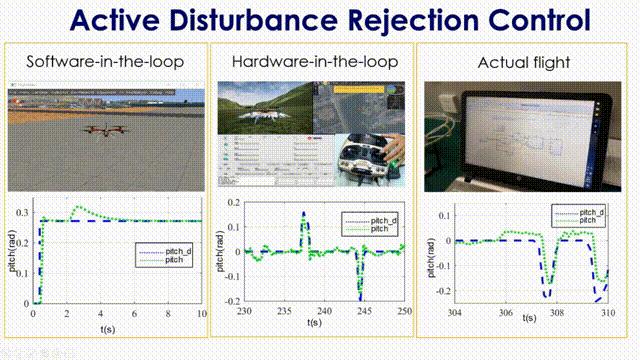
• RflySim平台的使用技能,包含(不限于)软件在环仿真、硬件在环仿真以及真机实飞算法迁移等;
• 掌握运用MATLAB/Simulink进行基于模型设计的完整流程和快速开发技能;
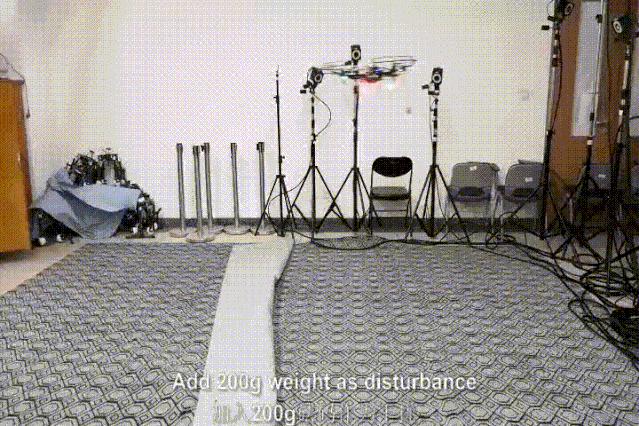
• 通过学习多旋翼无人机控制器设计相关理论知识,掌握飞行控制中的滤波器设计、多旋翼无人机控制器设计、半自主模式设计等实验。
• 结合理论知识学习和控制算法开发,完成无人机真机算法迁移、部署和调试,掌握Sim2Real的多旋翼无人机开发理念。





二. 培训形式与内容
PART1. 培训形式
培训将采取“线上+线下”集中授课的形式进行。线上采用直播授课的形式,报名学员免费提供课程录播视频,发送全部案例代码,建立课程答疑群,群内常驻负责答疑的专业老师;线下采用现场式教学模式,由专业飞手带队,在飞行场地对线上课程中的实飞案例进行现场指导教学,实现Sim2Real的开发理念。
PART2. 培训内容
专题一:RflySim平台介绍篇
RflySim平台详细介绍包括平台组成和软硬件介绍,软、硬件使用说明,PSP代码生成与烧录工具箱介绍,软、硬件在环仿真流程教学等内容。帮助学员熟悉RflySim平台的特点、特色功能以及核心组件的使用方法;
专题二:仿真实验篇
首先通过基于RflySim平台的模型设计、软件在环仿真及硬件在环仿真案例,帮助学员深入熟悉基于RflySim平台的飞控底层算法的全套开发流程、实验步骤等。然后,重点讲解多旋翼动力系统设计和建模、滤波器设计实验、半自主控制模式设计等实验,帮助学员完成具体案例的开发,掌握基于模型设计的开发思路。
专题三:实飞调试篇
通过对线上课程的理论知识学习,掌握多旋翼无人机的姿态、位置控制器设计及半自主控制等模式开发。本篇将线上课程所开发的算例移植到真机,完成多旋翼无人机的真机部署、调试到真实飞行,实现Sim2Real的开发流程。

三. 培训讲师
戴训华副教授以及飞思实验室学生&工程师团队
四.培训费用
具体收费套餐如下:
套餐1:线上培训 3999元;
套餐2:线上培训+线下现场教学 6999元;
如上线下现场教学中的住宿费用不包含在收费套餐中,提供以下住宿收费标准,学员可自行选择性购买:
住宿费用明细 :

五. 增值服务
1. 凡报名学员将获得本次培训中的随堂电子资料(案例代码);
2. 凡报名学员遇到与课程相关的问题,均可在课程结束后得到老师的解答与指导(邮件、微信等);
3. 完成线上+线下教学内容的学员可获得由飞思实验室颁发的结业证书一份;
4. 凡购买套餐1课程的学员,均提供线上课程视频回放;
5. 凡飞思实验室前期课程报名成功学员,报名本期课程均享受半价优惠;
6. 四人组团报名,一人免费;三人组团报名,一人半价;两人组团报名,一人七折;
06课程前期咨询、报名及缴费
请各位有意向报名的学员,关注飞思实验室公众号底部“仿真平台”->“课程咨询”进行相关问题咨询。
七. 注意事项
1. 本次课程配套中,线上课程所涉及的的硬件有支持PX4系统的飞控、遥控器及遥控器接收机等硬件,推荐配套硬件的型号为:Pixhawk 6C(或Pixhawk 6C mini)、天地飞RF209S遥控器接收机、天地飞ET10遥控器、配套USB-C数据线、配套杜邦线等。线下课程中实飞可使用飞思实验室提供的飞机进行实验(若携带本人所使用的飞机请将飞机状态调试到正常实飞状态)。
2. 课程报名缴费提供普通发票,发票类型为培训费,具体费用支付方面问题请进入培训咨询群进行了解。
3. 本次课程中所使用的飞机型号为飞思X450模型设计版,需要购买的学员可咨询课程助教老师进行购买。飞思实验室(部分)其余四旋翼无人机如下图所示。

4. 本课程全程(线上+线下)需学员自行准备电脑,电脑配置及软件最低要求可见如下:
l 系统:Windows 10 x64系统(版本大于等于1809)
l CPU:Intel i5 十代处理器及以上,或同等性能AMD处理器
l 显卡:英特尔集成显卡UHD 630及以上,或同等性能AMD显卡
l 内存:容量16G及以上,频率DDR3 1600MHz及以上
l 硬盘:安装盘剩余容量40G及以上(推荐固态硬盘)
l 显示器:分辨率1080P(1920*1080)及以上
l 接口:至少有一个USB Type A接口(可用扩展线)
MATLAB:2017b或以上版本(推荐2017b版本)
注:电脑配置应该越高越好,低配电脑也可以运行本平台Demo,但是可能出现控制不稳定、实验效果不佳等问题,MATLAB请提前自行安装。
5.本次课程可在免费版上进行实验,可以在https://rflysim.com/download填写邮箱,从而获取云盘下载链接。
平台首次安装请参考安装教程:https://www.bilibili.com/video/BV1oM411V7XE/?spm_id_from=333.999.0.0 。
其他各版本下载链接和注册码请咨询 service@rflysim.com。
注:课程开始之前请务必完成RflySim平台免费版安装。
6. 本次课程中理论部分详细讲解请见书籍《多旋翼飞行器设计与控制》、《多旋翼飞行器设计与控制实践》,如下图所示。左侧的《多旋翼飞行器设计与控制实践》为2020年推出的针对飞行控制算法开发的实践课程,包含本课程理论知识与其他实验。右侧的《多旋翼飞行器设计与控制》为2017年推出的教程,主要针对多旋翼控制理论。

八. 未来计划(部分)课程展示
多旋翼无人机视觉控制接口、通信、控制例程与实践。单目视觉撞击小球实验/单目视觉穿环完整任务实验/双目相机标定、人脸识别、跟踪实验/树莓派或NX(Linux/ROS环境)与飞控硬件同时在环的视觉仿真/真机视觉控制应用介绍与演示。


RflySim平台集群算法例程与接口详解。设计集群相关算法,在Simulink中实现算法,并连接UE4显示引擎,进行集群算法的软件在环仿真、硬件在环仿真、和真机实时通信与控制。Python控制无人机集群接口介绍与实验,带视觉的分布式集群功能介绍等等。


后续培训课程将每1~2个月进行一次,课程开发中,敬请期待!!!
相关文章:
“基于RflySim平台飞控底层算法开发”系列专题培训 (第三期)
>> RflySim平台系列专题培训 RflySim平台是一个生态系统或工具链(官网:https://doc.rflysim.com),发起于北航可靠飞行控制研究组,主要用于遵循基于模型设计的思想进行无人系统的控制和安全测试。本平台选择MATL…...
Leetcode刷题详解——全排列 II
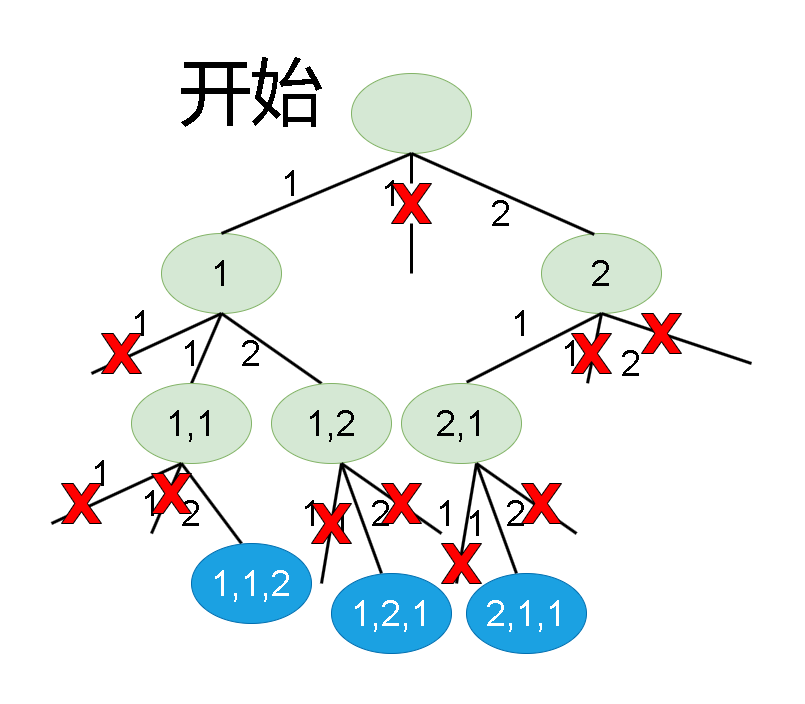
1. 题目链接:47. 全排列 II 2. 题目描述: 给定一个可包含重复数字的序列 nums ,按任意顺序 返回所有不重复的全排列。 示例 1: 输入:nums [1,1,2] 输出: [[1,1,2],[1,2,1],[2,1,1]]示例 2: 输…...
音频——解析 PCM 数据
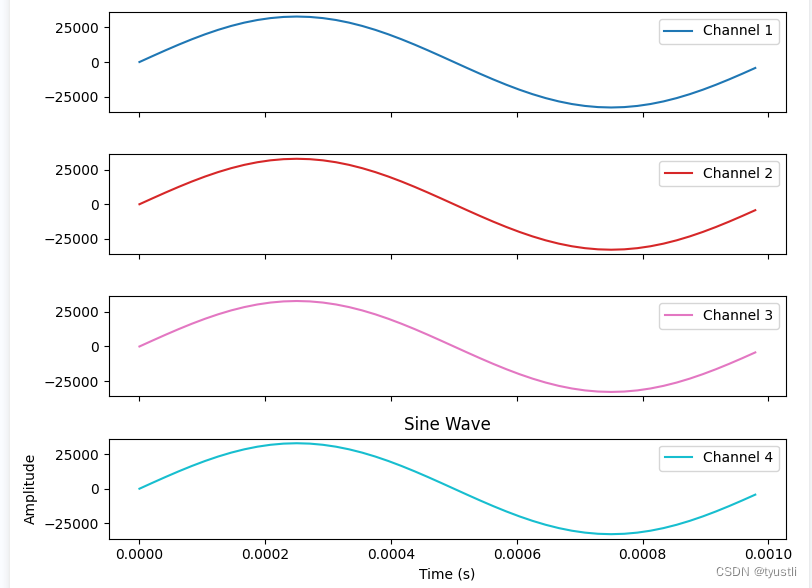
文章目录 生成 PCM 数据16bit16bit mono16bit stereo16bit 4 channel16bit 8 channel24bit解析 PCM 数据解析 24bit 数据程序源码生成 PCM 源码解析 PCM 源码生成 PCM 数据 16bit 16bit mono int 48k_16bit_modo[] = {0, 4276, 8480, 12539, 16383, 19947, 23169, 25995, 28…...
win10 下 ros + Qt 工程CMakeLists.txt
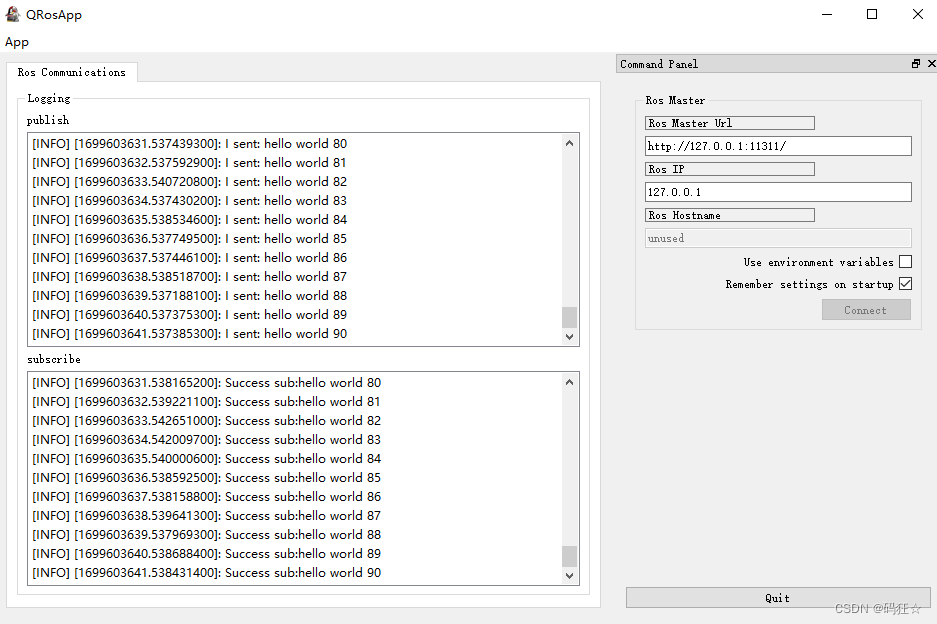
win10 下 ros Qt 工程CMakeLists.txt 系统:win10 ros: melodic Qt: 5.12.12 源码目录: D:\workspace\catkin_qt 示例代码 https://github.com/ncnynl/ros-qt.git 由于示例代码是Qt4 ,目前我是用QT5,所以CMakeLists.txt 修改如下 CMakeLists.txt #####…...
Scala中编写多线程爬虫程序并做可视化处理
目录 一、引言 二、Scala爬虫程序的实现 1、引入必要的库 2、定义爬虫类 3、可视化处理 三、案例分析:使用Scala爬取并可视化处理电影数据 1、定义爬虫类 2、实现爬虫程序的控制逻辑 3、可视化处理电影数据 四、总结 一、引言 随着互联网的快速发展&#…...

使用 huggingface_hub 镜像下载 大模型
download.py 👇 import os # 配置 hf镜像 os.environ[HF_ENDPOINT] https://hf-mirror.com# 设置保存的路径 local_dir "XXXXXX"# 设置仓库id model_id "sensenova/piccolo-large-zh"cmd f"huggingface-cli download --resume-downlo…...
,剑指offer,力扣)
路径加密(替换空格),剑指offer,力扣
目录 我们直接看题解吧: 方法: 审题目事例提示: 解题思路: 法1: 代码(法1): 法2: 代码(法2): 原题解: 【剑指Offer】2、替…...
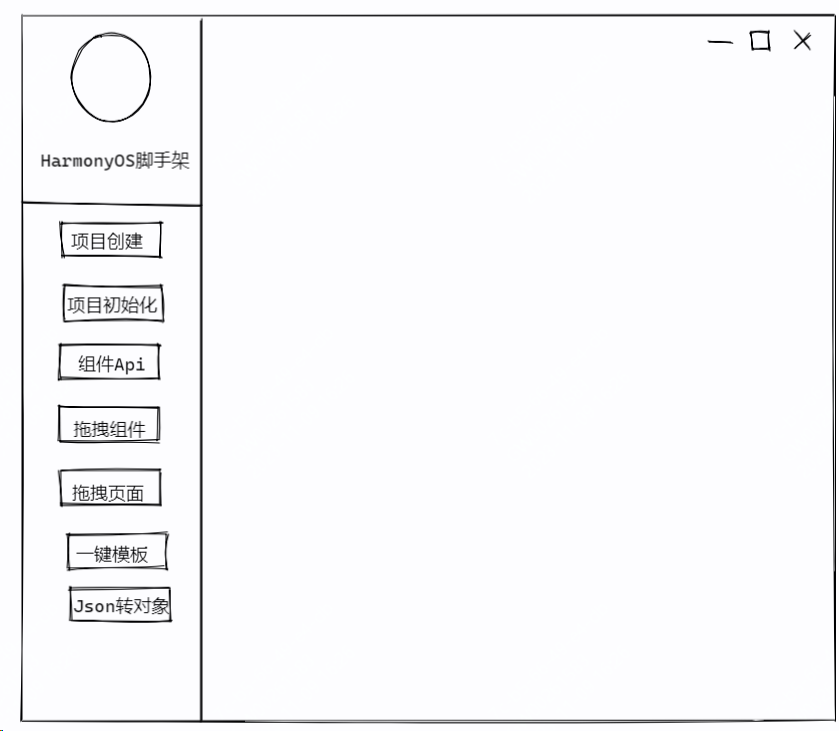
HarmonyOS开发:UI开展前的阶段总结
前言 关于HarmonyOS,陆陆续续总结了有14篇的文章,大家可以发现,没有一篇是关于UI相关的,不是自己没有分享的打算,而是对于这些UI而言,官方都有着一系列的文档输出,如果我再一一的分享࿰…...

Linux安装Libreoffice
windos安装Libreoffice https://zh-cn.libreoffice.org/ C:\路径\LibreOffice\program\soffice.bin --help 看是否输出帮助命令 Linux安装Libreoffice 1、下载rpm包并解压https://mirrors.cloud.tencent.com/libreoffice/libreoffice/stable/ 2、安装: yum install…...
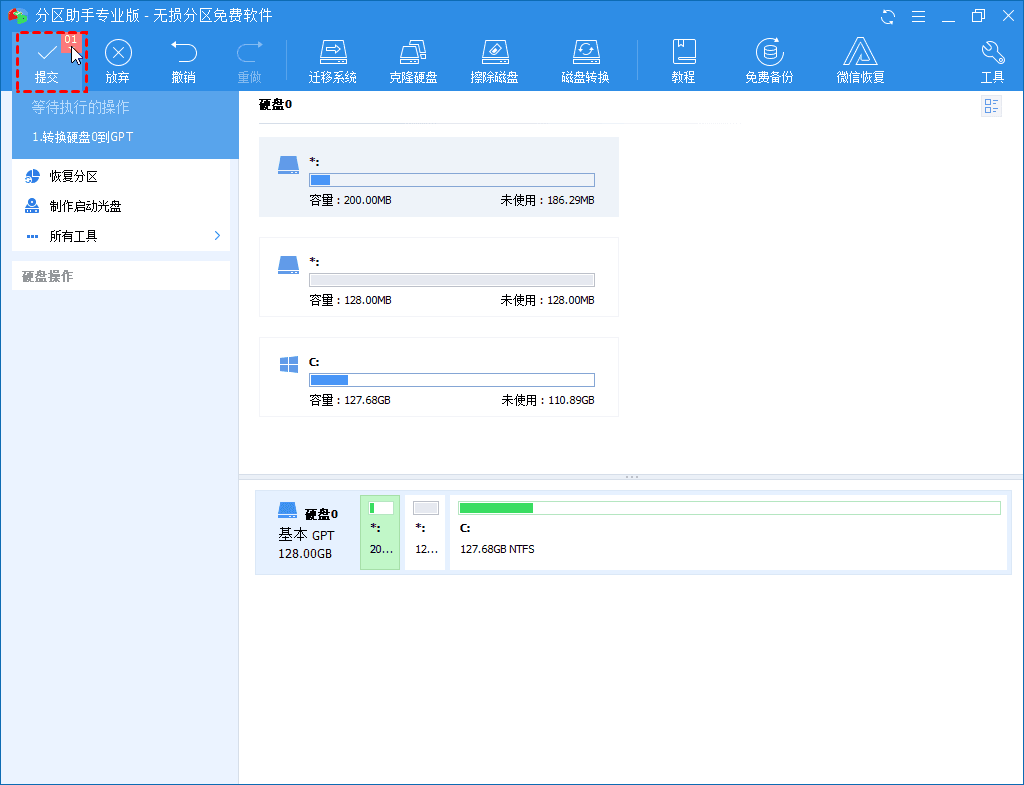
如何将系统盘MBR转GPT?无损教程分享!
什么是MBR和GPT? MBR和GPT是磁盘的两种分区形式:MBR(主引导记录)和GPT(GUID分区表)。 新硬盘不能直接用来保存数据。使用前应将其初始化为MBR或GPT分区形式。但是,如果您在MBR时需…...
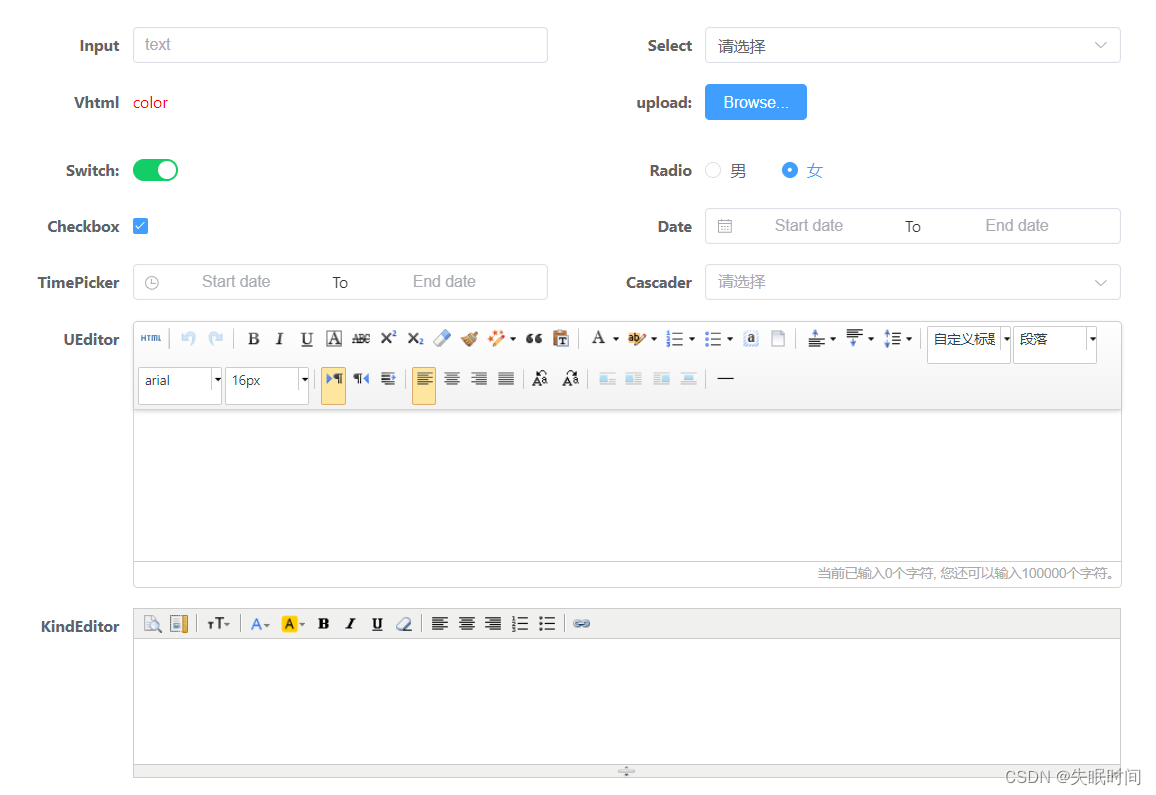
基于element-plus定义表单配置化
文章目录 前言一、配置化的前提二、配置的相关组件1、新建form.vue组件2、新建input.vue组件3、新建select.vue组件4、新建v-html.vue组件5、新建upload.vue组件6、新建switch.vue组件7、新建radio.vue组件8、新建checkbox.vue组件9、新建date.vue组件10、新建time-picker.vue组…...
|LeetCode122. 买卖股票的最佳时机 II、LeetCoed55. 跳跃游戏、LeetCode45. 跳跃游戏 II)
LeetCode算法题解(贪心)|LeetCode122. 买卖股票的最佳时机 II、LeetCoed55. 跳跃游戏、LeetCode45. 跳跃游戏 II
一、LeetCode122. 买卖股票的最佳时机 II 题目链接:122. 买卖股票的最佳时机 II 题目描述: 给你一个整数数组 prices ,其中 prices[i] 表示某支股票第 i 天的价格。 在每一天,你可以决定是否购买和/或出售股票。你在任何时候 …...

计蒜客详解合集(2)期
目录 T1126——单词倒排 T1617——地瓜烧 T1612——蒜头君的数字游戏 T1488——旋转单词 T1461——校验信用卡号码 T1437——最大值和次大值 T1126——单词倒排 超级水的一道题,和T1122类似但更简单,分割后逆序输出即可~ 编写程序,读入…...
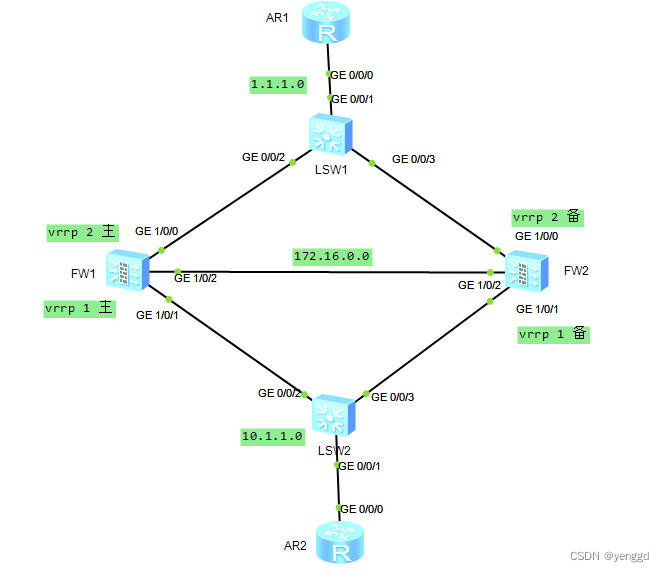
华为防火墙vrrp+hrp双机热备主备备份(两端为交换机)
默认上下来全两个vrrp主都是左边 工作原理: vrrp刚开机都是先initialize状态,然后切成active或standb状态。 hrp使用18514端口,且用的单播,要策略放行,由主设备发hrp心跳报文 如果设备为acitve状态时自动优先级为65…...
Angular 由一个bug说起之一:List / Grid的性能问题
在angular中,MatTable构建简单,使用范围广。但某些时候会出现卡顿 卡顿情景: 1:一次性请求太多的数据 2:一次性渲染太多数据,这会花费CPU很多时间 3:行内嵌套复杂的元素 4:使用过多的…...

第12章 PyTorch图像分割代码框架-3:推理与部署
推理模块 模型训练完成后,需要单独再写一个推理模块来供用户测试或者使用,该模块可以命名为test.py或者inference.py,导入训练好的模型文件和待测试的图像,输出该图像的分割结果。inference.py主体部分如代码11-7所示。 代码11-7 …...

MYSQL---基础篇
一、数据库操作 1.创建数据库:CREATE DATABASE db_test1; 2.使用数据库:use 数据库名; 3.删除数据库:DROP DATABASE [IF EXISTS] db_name; 4.创建表:CREATE TABLE table_name ( field1 datatype, field2…...
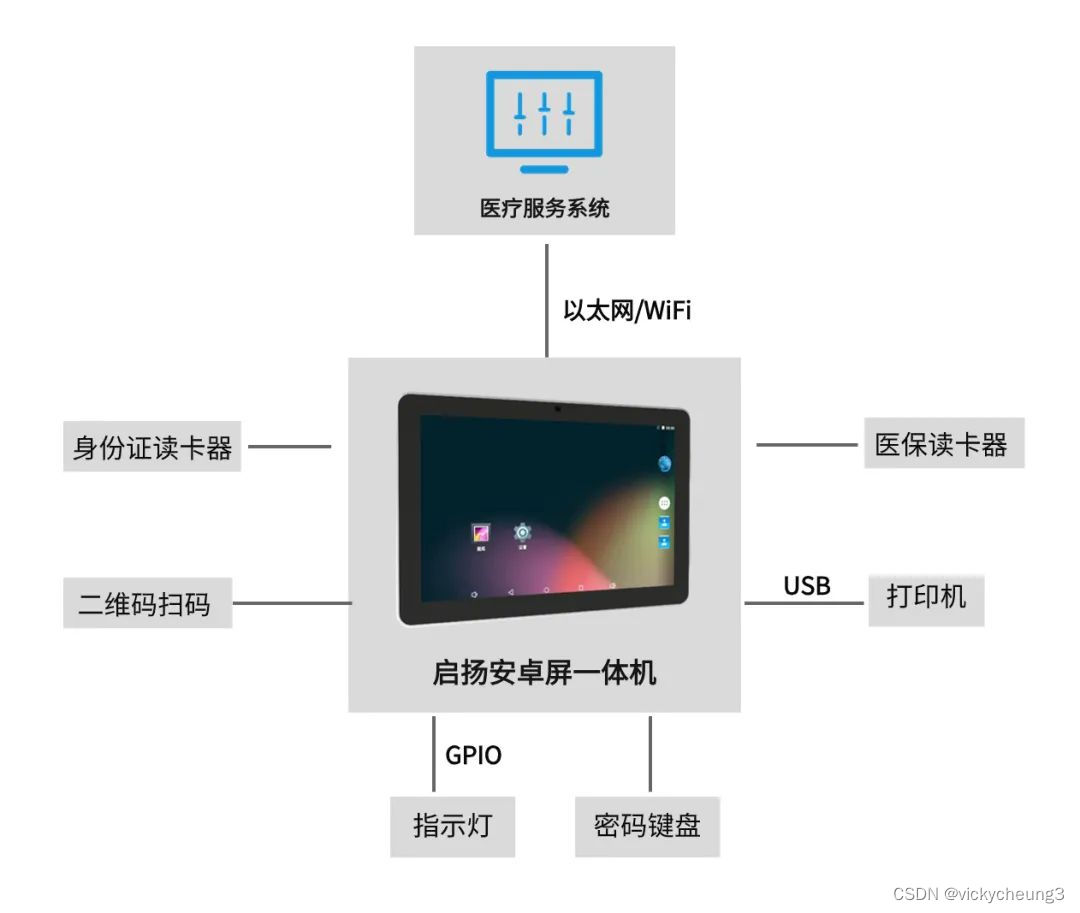
【启扬方案】启扬安卓屏一体机在医疗自助服务终端上的应用解决方案
为了解决传统医疗模式下的“看病难、看病慢”等问题,提高医疗品质、效率与效益,自助服务业务的推广成为智慧医疗领域实现信息化建设、高效运作的重要环节。 医疗自助服务终端是智慧医疗应用场景中最常见的智能设备之一,它通过与医院信息化系统…...

收藏!7个国内「小众」的程序员社区
技术社区是大量开发者的集聚地,在技术社区可以了解到行业的最新进展,学习最前沿的技术,认识有相同爱好的朋友,在一起学习和交流。 国内知名的技术社区有CSDN、博客园、开源中国、51CTO,还有近两年火热的掘金ÿ…...

LeetCode(4)删除有序数组中的重复项 II【数组/字符串】【中等】
目录 1.题目2.答案3.提交结果截图 链接: 80. 删除有序数组中的重复项 II 1.题目 给你一个有序数组 nums ,请你** 原地** 删除重复出现的元素,使得出现次数超过两次的元素只出现两次 ,返回删除后数组的新长度。 不要使用额外的数…...

2024年最新IntelliJ IDEA插件安装避坑指南:从MybatisCodeHelper到Rainbow Brackets
2024年IntelliJ IDEA插件深度配置指南:从效率工具到代码美学 1. 插件生态与开发效率的共生关系 在当代Java开发领域,IntelliJ IDEA已成为事实上的标准IDE,其强大的插件系统则是提升开发体验的核心引擎。根据JetBrains官方统计,超过…...

QwQ-32B开源模型入门:ollama中RMSNorm层稳定性调优指南
QwQ-32B开源模型入门:ollama中RMSNorm层稳定性调优指南 1. 引言:为什么需要关注RMSNorm的稳定性? 如果你用过QwQ-32B或者其他大语言模型,可能遇到过这样的情况:模型运行得好好的,突然就“崩了”——要么输…...

GitHub中文界面完整指南:3分钟让你的GitHub说中文
GitHub中文界面完整指南:3分钟让你的GitHub说中文 【免费下载链接】github-chinese GitHub 汉化插件,GitHub 中文化界面。 (GitHub Translation To Chinese) 项目地址: https://gitcode.com/gh_mirrors/gi/github-chinese 还在为GitHub的英文界面…...

DAMOYOLO-S案例分享:古建筑图像中斗拱/飞檐/彩画构件自动识别
DAMOYOLO-S案例分享:古建筑图像中斗拱/飞檐/彩画构件自动识别 1. 引言 如果你是一位古建筑爱好者、文物保护工作者,或者是一名建筑专业的学生,你可能会遇到一个共同的难题:面对一张复杂的古建筑照片,如何快速、准确地…...
)
腾讯综合素质测试--2026年版(两个项目)
本文分享我收集到的题目,大家有需要可自行下载,第一轮主要是看这个文件夹前言猜测问题可能和应聘的岗位有关,我是收到有两个项目的邮件,在网络上有人说是三个题目类型--两个项目的根据我个人情况,其实AI总结࿰…...
)
别再只用yum了!CentOS 7上源码编译安装Tinyproxy 1.11.1,开启账号密码验证(附一键脚本)
从源码到安全代理:CentOS 7深度部署Tinyproxy 1.11.1全指南 在Linux生态中,yum安装的便捷性往往掩盖了源码编译的价值。当我们需要特定功能、定制化路径或最新版本时,从源码构建才是真正的高手之道。今天要探讨的Tinyproxy 1.11.1正是一个典型…...

Layui tab选项卡如何动态根据ID值进行程序化切换
element.tabChange() 是 Layui 官方唯一支持的程序化 tab 切换方式,需严格匹配 lay-filter 和 lay-id,且必须在 tab 渲染完成后调用,动态添加时须等 tabAdd() 回调执行完毕。element.tabChange() 是唯一可靠的切换入口直接调用 element.tabch…...

番茄小说下载器:一键将番茄小说转为EPUB和有声书的终极解决方案
番茄小说下载器:一键将番茄小说转为EPUB和有声书的终极解决方案 【免费下载链接】Tomato-Novel-Downloader 番茄小说下载器不精简版 项目地址: https://gitcode.com/gh_mirrors/to/Tomato-Novel-Downloader 你是否曾为网络信号差无法追更番茄小说而烦恼&…...

Bilibili下载器:如何解锁4K大会员视频的本地保存方案
Bilibili下载器:如何解锁4K大会员视频的本地保存方案 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 你是否曾为无法离线观…...
)
别再死记硬背了!用‘点火公式’Wallis快速搞定高次幂三角积分(附Python验证脚本)
高次幂三角积分速算秘籍:Wallis点火公式实战指南 第一次遇到∫sin⁶xdx这样的积分时,我盯着题目发了半小时呆。传统的分部积分法需要反复套用公式,计算过程堪比俄罗斯套娃。直到发现Wallis公式——这个被学生们戏称为"点火公式"的神…...