适用于4D毫米波雷达的目标矩形框聚类
目录
一、前言
二、点云聚类分割
三、基于方位搜索L型拟合
四、评价准则之面积最小化
五、评价准则之贴合最大化
六、评价准则之方差最小化
一、前言
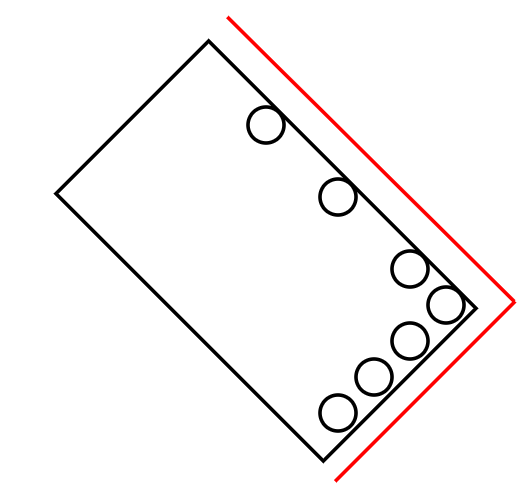
对于多线束雷达可以获取目标物体更全面的面貌,在道路中前向或角雷达可能无法获取目标车矩形框但可以扫到两边或者一边,在做目标方向估计时这些信息至关重要。看到一篇文章不错的思路,拿来记录借鉴下。
整体算法:
Step1: 将距离点按照预先设定的距离阈值进行聚类划分簇
Step2:基于方位搜索+特定准则进行L型拟合,得出4边参数
2.1 矩形面积最小化
2.2 点到边靠近最大化
2.3 点到边方差最小化
二、点云聚类分割
对于所有点,在距离r一点内找到它的相邻点,将相邻点设置为未检测,对未检测点继续找到距离r内的任何一个点,把邻近点放在这个簇中直到集群不再增长。
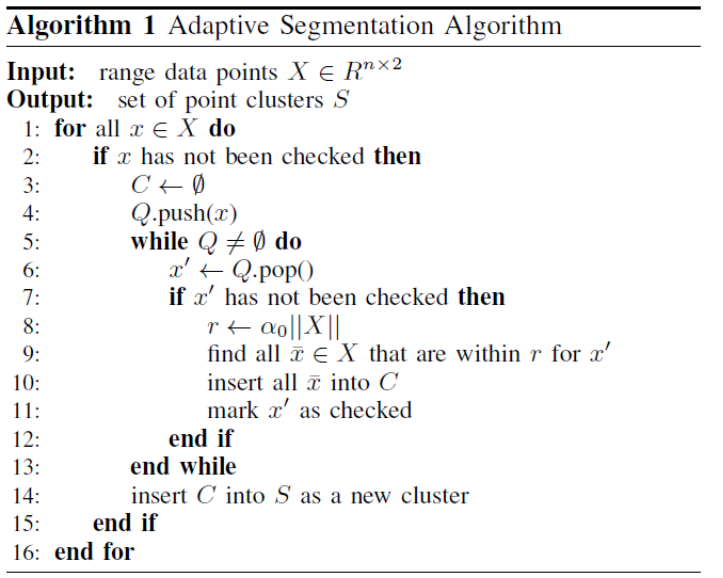
def _adoptive_range_segmentation(self, ox, oy):# Setup initial clustersegment_list = []for i, _ in enumerate(ox):c = set()r = self.R0 + self.Rd * np.linalg.norm([ox[i], oy[i]])for j, _ in enumerate(ox):d = np.hypot(ox[i] - ox[j], oy[i] - oy[j])if d <= r:c.add(j)segment_list.append(c)# Merge clusterwhile True:no_change = Truefor (c1, c2) in list(itertools.permutations(range(len(segment_list)), 2)):if segment_list[c1] & segment_list[c2]:segment_list[c1] = (segment_list[c1] | segment_list.pop(c2))no_change = Falsebreakif no_change:breakreturn segment_list
三、基于方位搜索L型拟合
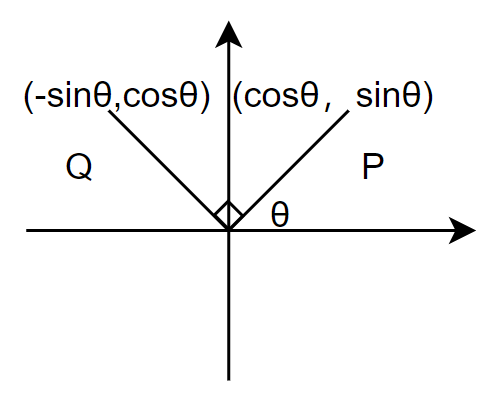
step2:基于方位搜索的L 型拟合
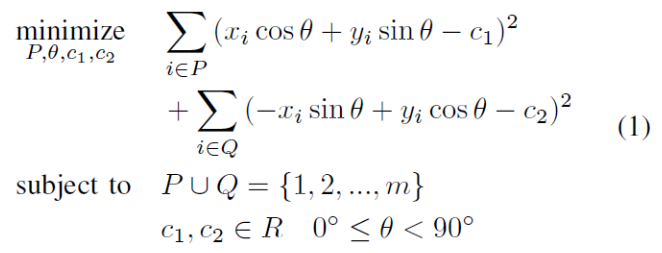
遍历矩形的所有可能方向;在每次迭代中,可以找到一个该方向并包含所有扫描点的矩形;进一步可以得到所有点到矩形四条边的距离,并根据这些距离将点分为P和Q,并计算相应的平方误差作为(1)中的目标函数;在迭代所有方向并获得所有相应的平方误差后,寻找实现最小平方误差的最优方向,并根据该方向拟合矩形
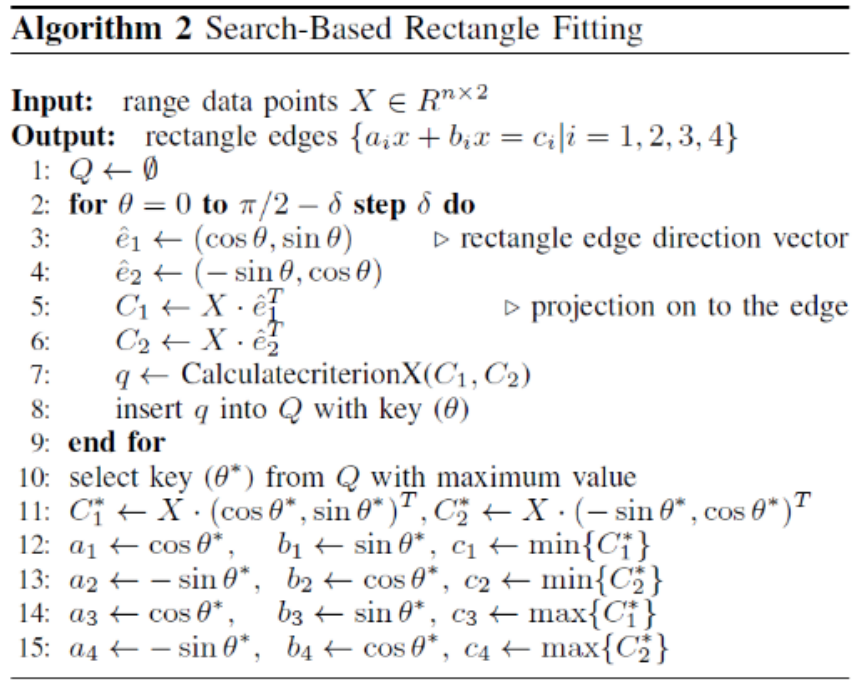
def _rectangle_search(self, x, y):xy = np.array([x, y]).Td_theta = np.deg2rad(self.d_theta_deg_for_search)min_cost = (-float('inf'), None)for theta in np.arange(0.0, np.pi / 2.0 - d_theta, d_theta):c = xy @ rot_mat_2d(theta)c1 = c[:, 0]c2 = c[:, 1]# Select criteriacost = 0.0if self.criteria == self.Criteria.AREA:cost = self._calc_area_criterion(c1, c2)elif self.criteria == self.Criteria.CLOSENESS:cost = self._calc_closeness_criterion(c1, c2)elif self.criteria == self.Criteria.VARIANCE:cost = self._calc_variance_criterion(c1, c2)if min_cost[0] < cost:min_cost = (cost, theta)# calc best rectanglesin_s = np.sin(min_cost[1])cos_s = np.cos(min_cost[1])c1_s = xy @ np.array([cos_s, sin_s]).Tc2_s = xy @ np.array([-sin_s, cos_s]).Trect = RectangleData()rect.a[0] = cos_srect.b[0] = sin_srect.c[0] = min(c1_s)rect.a[1] = -sin_srect.b[1] = cos_srect.c[1] = min(c2_s)rect.a[2] = cos_srect.b[2] = sin_srect.c[2] = max(c1_s)rect.a[3] = -sin_srect.b[3] = cos_srect.c[3] = max(c2_s)return rect
四、评价准则之面积最小化
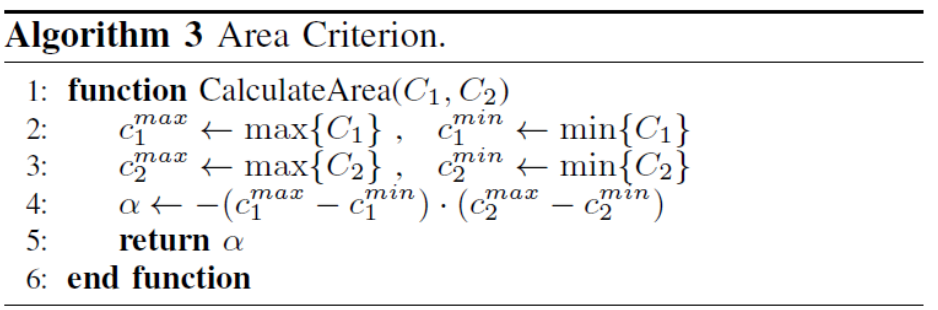
def _calc_area_criterion(c1, c2):c1_max, c1_min, c2_max, c2_min = LShapeFitting._find_min_max(c1, c2)alpha = -(c1_max - c1_min) * (c2_max - c2_min)return alpha
五、评价准则之贴合最大化
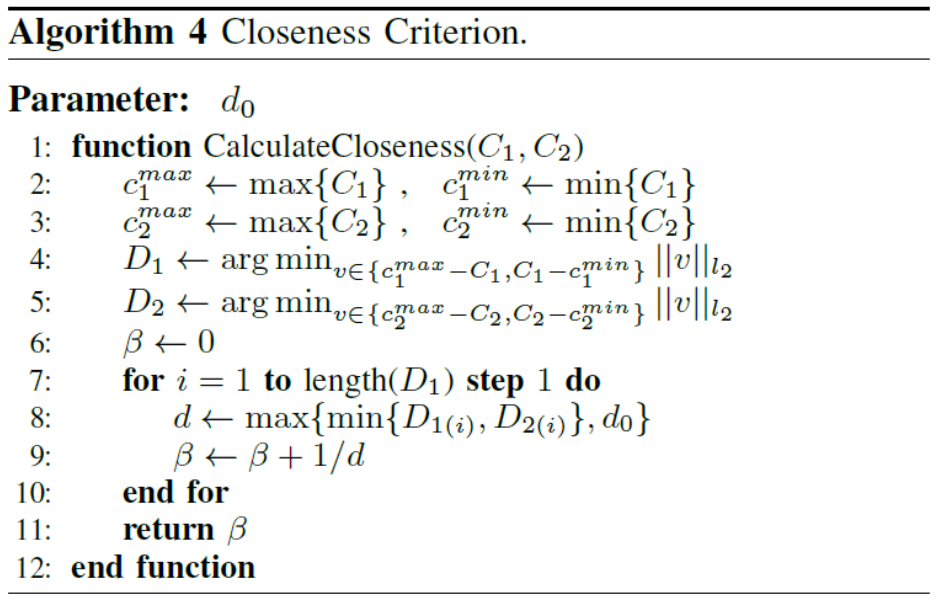
def _calc_closeness_criterion(self, c1, c2):c1_max, c1_min, c2_max, c2_min = LShapeFitting._find_min_max(c1, c2)# Vectorizationd1 = np.minimum(c1_max - c1, c1 - c1_min)d2 = np.minimum(c2_max - c2, c2 - c2_min)d = np.maximum(np.minimum(d1, d2), self.min_dist_of_closeness_criteria)beta = (1.0 / d).sum()return beta六、评价准则之方差最小化
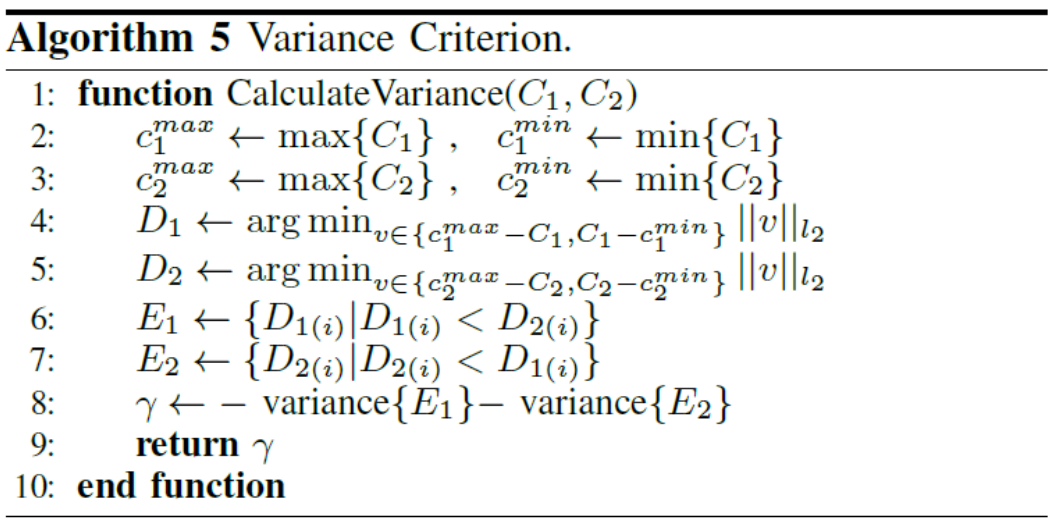
def _calc_variance_criterion(c1, c2):c1_max, c1_min, c2_max, c2_min = LShapeFitting._find_min_max(c1, c2)# Vectorizationd1 = np.minimum(c1_max - c1, c1 - c1_min)d2 = np.minimum(c2_max - c2, c2 - c2_min)e1 = d1[d1 < d2]e2 = d2[d1 >= d2]v1 = - np.var(e1) if len(e1) > 0 else 0.v2 = - np.var(e2) if len(e2) > 0 else 0.gamma = v1 + v2return gamma
Result:
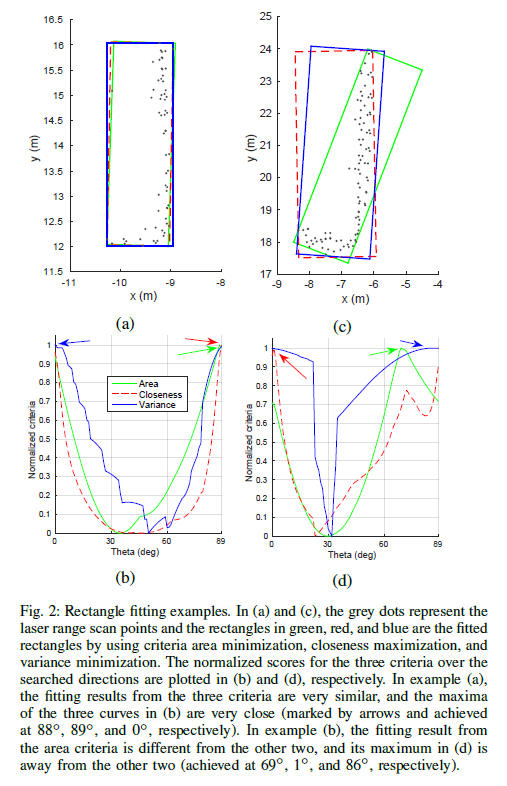
参考:《Efficient L-Shape Fitting for Vehicle Detection Using Laser Scanners》
相关文章:
适用于4D毫米波雷达的目标矩形框聚类
目录 一、前言 二、点云聚类分割 三、基于方位搜索L型拟合 四、评价准则之面积最小化 五、评价准则之贴合最大化 六、评价准则之方差最小化 一、前言 对于多线束雷达可以获取目标物体更全面的面貌,在道路中前向或角雷达可能无法获取目标车矩形框但可以扫到两边…...
[模版总结] - 树的基本算法1 - 遍历
树结构定义 一种非线性存储结构,具有存储“一对多”关系的数据元素集合 种类 General Tree TrieB/B 树二叉树 满/完满/完全二叉树 完美BT : 除了叶子结点外所有节点都有两个字节点,每一层都完满填充完全BT: 除最后一层以外其他每一层都完美…...

macOS Sonoma 14.2beta2(23C5041e)发布(附黑白苹果镜像地址)
系统介绍 黑果魏叔11 月 10 日消息,今日向 Mac 电脑用户推送了 macOS 14.2 开发者预览版 Beta 2 更新(内部版本号:23C5041e),本次更新距离上次发布隔了 14 天。 macOS Sonoma 14.2 添加了 Music 收藏夹播放列表&…...
Docker进阶——再次认识docker的概念 Docker的结构 Docker镜像结构 镜像的构建方式
前言 在微服务大量应用的互联网时代,经常能看到docker的身影。作为docker的爱好者(在服务器安装MySQL,Redis。。。我用的都是docker),我也会持续深入学习和认识docker。 本篇博客再次介绍docker的基本概念࿰…...

postgis函数学习
1.特定功能的SQL 转为完整的json,前端调用用json_build_object、jsonb_agg等函数,处理mass_test表 select json_build_object(type,FetureCollection,features,jsonb_agg(st_asgeojson(mt.*)::json)) from mass_test mt获取图形边界范围的坐标 select…...
【Gradle-12】分析so文件和依赖的关系
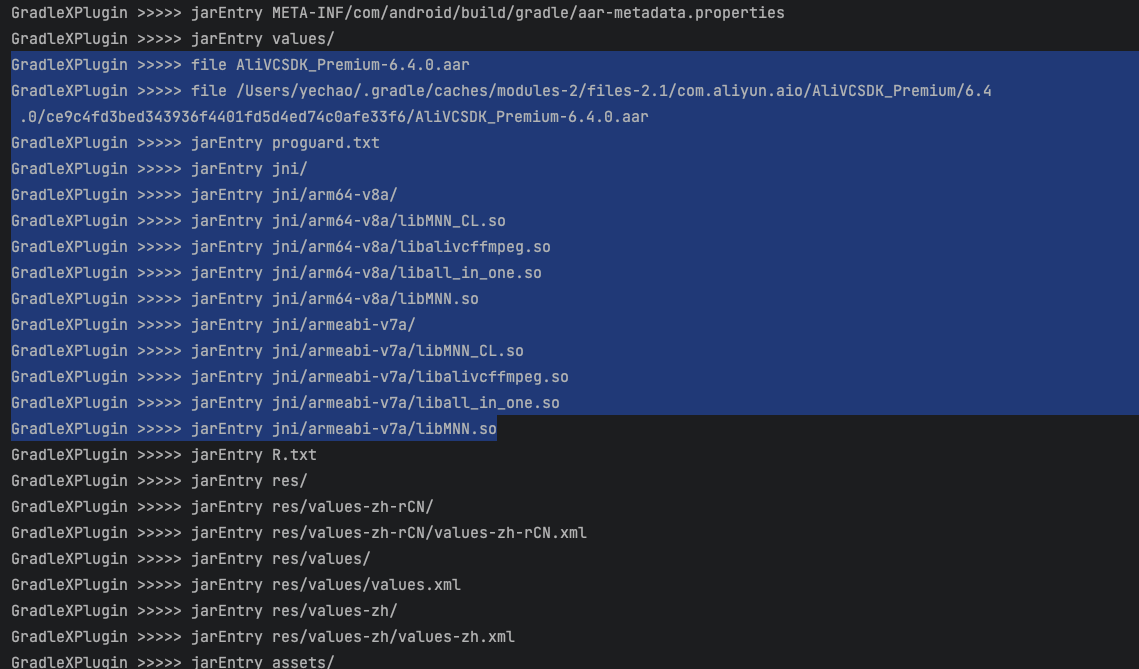
1、前言 在包大小的占比中,so文件的占比往往是最高的,动辄几兆的大小多一个都会把包大小的指标打爆。 而在各厂商要求对手机CPU ARM架构进行分包适配的情况下,你更需要知道哪些依赖是没有适配v7a/v8a的,这将影响你的APP在应用市场…...
vue项目pdf文件的预览
1.下载 您可以在以下网址下载pdfjsLib:https://github.com/mozilla/pdf.js pdfjsLib是一个开源项目,您可以在GitHub上找到其源代码和相关资源。 2.放置文件位置 3.进入 在index.html引入 <script src"<% BASE_URL %>static/pdfjs-dist/b…...

企业计算机中了mkp勒索病毒怎么办,服务器中了勒索病毒如何处理
计算机技术的不断发展给企业的生产生活提供了极大便利,但也为企业带来了网络安全威胁。近期,云天数据恢复中心陆续接到很多企业的求助,企业的计算机服务器遭到了mkp勒索病毒攻击,导致企业的所有工作无法正常开展,给企业…...
Android拖放startDragAndDrop拖拽Glide加载堆叠圆角图,Kotlin(5)
Android拖放startDragAndDrop拖拽Glide加载堆叠圆角图,Kotlin(5) import android.content.ClipData import android.graphics.Canvas import android.graphics.Point import android.os.Bundle import android.util.Log import android.view.…...

1994-2021年分行业二氧化碳排放量数据
1994-2021年分行业二氧化碳排放量数据 1、时间:1994-2021年 2、来源:原始数据整理自能源年鉴 3、指标:统计年度、行业代码、行业名称、煤炭二氧化碳排放量、焦炭二氧化碳排放量、原油二氧化碳排放量、汽油二氧化碳排放量、煤油二氧化碳排放…...

如何进行Go程序的打包发布
上一篇,我们已经用GoLand开发了第一个程序Hello Kitty,接下去,我们将完成Go程序的打包发布。 执行: go build -x main.gogo build 和 go run 在编译过程中其实是差不多的,不同之处是 go build 会生成编译好二进制文件并删掉编译…...

python工具HIKVISION视频编码设备接入网关任意文件下载
python工具 构造payload /serverLog/downFile.php?fileName../web/html/serverLog/downFile.php漏洞证明 文笔生疏,措辞浅薄,望各位大佬不吝赐教,万分感谢。 免责声明:由于传播或利用此文所提供的信息、技术或方法而造成的任何…...
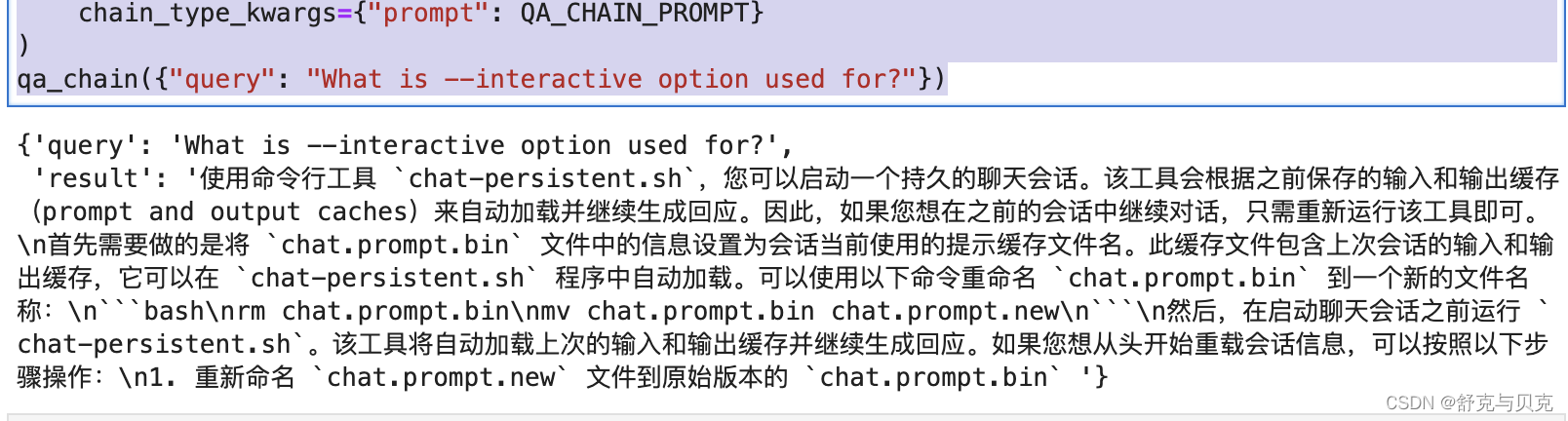
[NLP] 使用Llama.cpp和LangChain在CPU上使用大模型
一 准备工作 下面是构建这个应用程序时将使用的软件工具: 1.Llama-cpp-python 下载llama-cpp, llama-cpp-python [NLP] Llama2模型运行在Mac机器-CSDN博客 2、LangChain LangChain是一个提供了一组广泛的集成和数据连接器,允许我们链接和编排不同的模块。可以常…...
开发知识点-Ant-Design-Vue
Ant-Design-Vue a-input a-input Vue组件 a-spin 加载中的效果 data字段 mounted钩子函数 Ant Design Vue 组件库 list-type“picture-card” 上传的图片作为卡片展示 name show-upload-list action :beforeUpload“handleBeforeUpload” :headers“customHeaders” :disabl…...
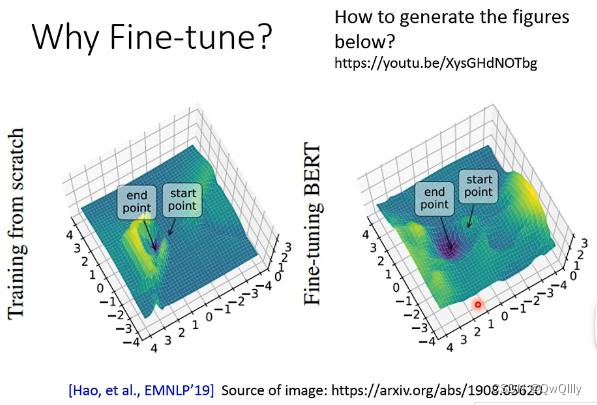
2022最新版-李宏毅机器学习深度学习课程-P50 BERT的预训练和微调
模型输入无标签文本(Text without annotation),通过消耗大量计算资源预训练(Pre-train)得到一个可以读懂文本的模型,在遇到有监督的任务是微调(Fine-tune)即可。 最具代表性是BERT&…...
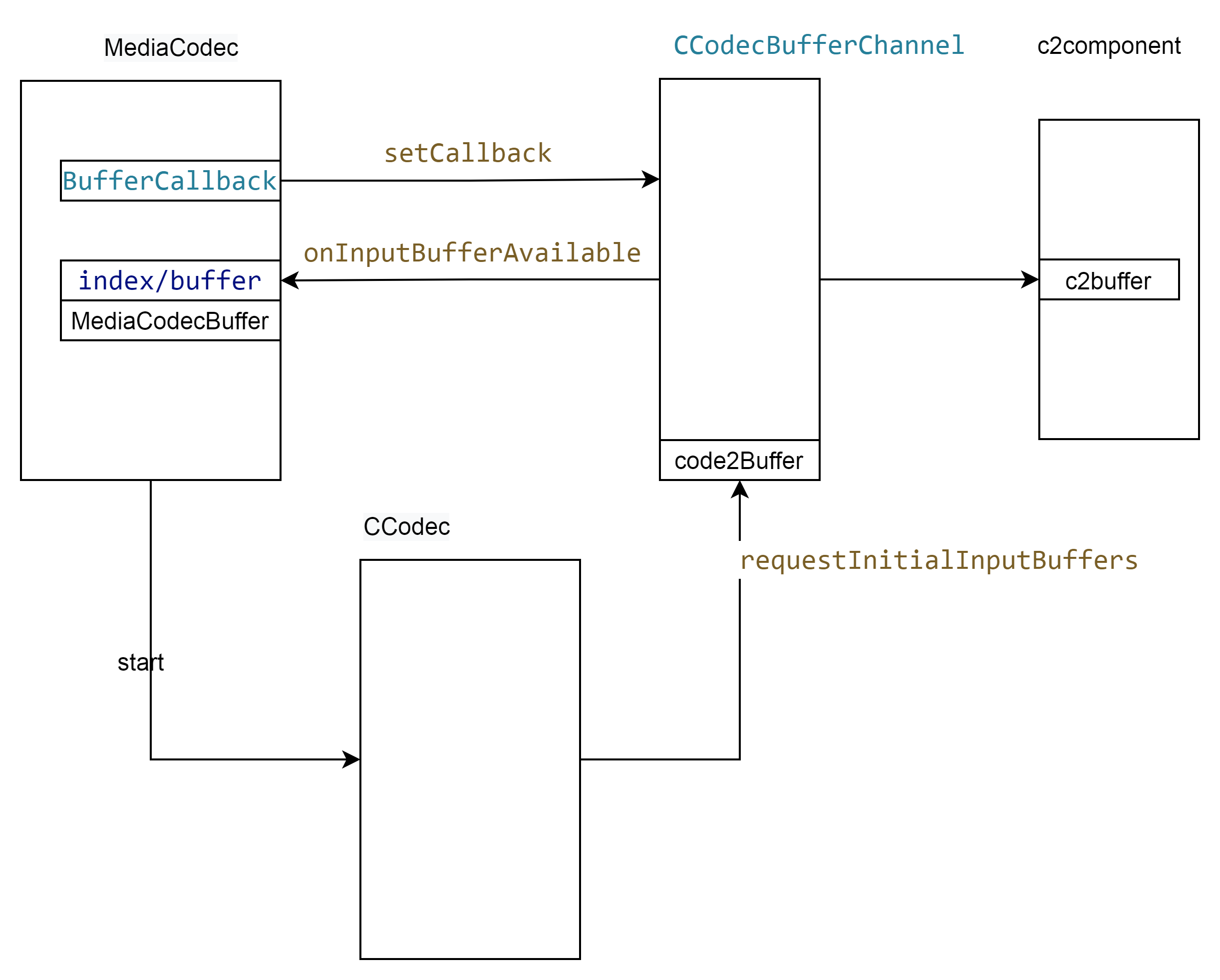
Android codec2 视频框架 之输入buffer
文章目录 输入端的内存管理输入数据包buffer结构体的转换 主要的流程如上, 申请内存在CCodecBufferChannel,申请之后回调到MediaCodec。然后应用从MediaCodec获取 将解码数据放到buffer中,CCodecBufferChannel在将这块buffer 送到componet模块…...
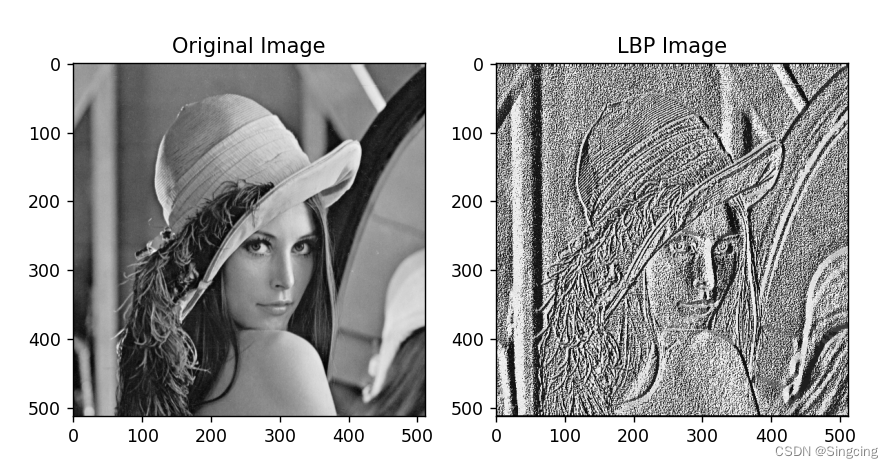
Python实现局部二进制算法(LBP)
1.介绍 局部二进制算法是一种用于获取图像纹理的算法。这算法可以应用于人脸识别、纹理分类、工业检测、遥感图像分析、动态纹理识别等领域。 2.示例 """ 局部二进制算法,计算图像纹理特征 """ import cv2 import numpy as np imp…...

如何评价现在的CSGO游戏搬砖市场
如何评价现在的csgo市场? 其实整个搬砖市场,现在已经变得乌烟瘴气,散发着“恶臭”。我个人非常鄙视那些虚有其表,大小通吃的做法,那些甚至连搬砖数据都看不懂的人,也出来吹嘘着“实力强大,经验丰…...

ResourceQuota对象在K8s上的说明
ResourceQuota资源对象的说明,以及在集群中的作用说明 定义说明 https://kubernetes.io/zh-cn/docs/concepts/policy/resource-quotas/ 集群中的资源组的划分和设计 在具有 32 GiB 内存和 16 核 CPU 资源的集群中,允许 A 团队使用 20 GiB 内存 和 10 核…...
悟空crm二次开发 增加客户保护功能 (很久没有消息,但是有觉得有机会的客户)就进入了保护转态
需求:客户信息录入不限数量,但是录入的信息1个月内只有自己和部门领导能看到,如果1个月内未成交或者未转移至自己的客保 则掉入公海所有人可见,这里所说的客保就是现在系统自带的客保 1、需求思维导图 2、新增保护按钮 3、点击该…...

如何用3行代码获取股票基金数据?efinance终极指南助你快速入门量化交易
如何用3行代码获取股票基金数据?efinance终极指南助你快速入门量化交易 【免费下载链接】efinance efinance 是一个可以快速获取基金、股票、债券、期货数据的 Python 库,回测以及量化交易的好帮手!🚀🚀🚀 …...

VBA生鲜商品损耗自动核销宏,打破老会计手动折算生鲜亏损传统,录入折价比例代码,一键核销库存成本,动态算损耗,机器实时核算碾压隔日人工统算模式。
结合智能会计中的“实地盘存制”与“成本流转假设”,用 Python VBA 混合双打(注:Python负责核心逻辑,VBA负责Excel交互,这是企业级落地的标准姿势),打造一套生鲜商品损耗自动核销宏。一、 实际…...

2026主流企业级AI智能体开发平台推荐:行业垂直领域的多样化需求
随着数字经济的深度发展,AI已从企业可选的技术补充,转变为驱动业务优化、效率提升、模式创新的核心支撑。不同行业的企业在数智化转型过程中,对AI技术的需求呈现出差异化、专业化特征,出现一批聚焦各领域的企业AI服务商。以下是当前主流的企业智能体开发平台及其核心能力,覆盖从…...

避开这7个SEO误区:我用Ahrefs工具拯救网站排名的真实案例
避开这7个SEO误区:我用Ahrefs工具拯救网站排名的真实案例 三年前,我的个人博客突然从谷歌第一页消失,日均流量暴跌72%。当时我自认为掌握了SEO的"秘诀"——频繁交换友链、大量堆砌关键词、每日更新短平快内容。直到用Ahrefs跑完完整…...

LinkSwift:基于JavaScript的网盘直链解析技术架构分析
LinkSwift:基于JavaScript的网盘直链解析技术架构分析 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼…...
)
保姆级教程:在MMSegmentation框架下复现HRNetV2+OCR语义分割(附完整代码与调试技巧)
从零实现HRNetV2OCR语义分割:MMSegmentation实战指南与深度调优 当你在GitHub上搜索"HRNetV2 OCR implementation"时,会发现大多数仓库要么只有论文复现的片段代码,要么存在各种环境兼容性问题。作为计算机视觉领域经典的语义分割方…...

自动化测试创新
自动化测试创新:提升效率与质量的新引擎 在数字化转型的浪潮中,软件开发的迭代速度不断加快,传统手工测试已难以满足高效、精准的需求。自动化测试通过技术创新,正成为企业降本增效的核心工具。它不仅能够缩短测试周期࿰…...

Keepalived 高可用与负载均衡
Keepalived 高可用与负载均衡一、基础概念1. 什么是 Keepalived基于 VRRP 协议 实现的高可用(HA)工具核心作用:单点故障自动切换,保证服务不间断同时集成 LVS 负载均衡 管理功能,可直接做四层负载均衡2. 核心应用场景高…...

ffmpeg的安装与配置
一、ffmpeg简介FFmpeg 是一套开源、免费且功能极其强大的跨平台音视频处理框架,在业界被广泛誉为“音视频处理的瑞士军刀”。无论你是想进行简单的格式转换,还是开发复杂的流媒体服务,FFmpeg 都是目前最核心的底层工具。以下是关于它的核心简…...

面试技巧提升:系统设计问题的高分回答框架
面试技巧提升:系统设计问题的高分回答框架 在技术面试中,系统设计问题往往是区分候选人的关键环节。无论是初级工程师还是资深架构师,能否清晰、系统地回答这类问题,直接决定了面试的成败。许多人在面对开放性的系统设计问题时容…...