平面运动机器人的传感器外参标定
简述
对任意两个传感器进行外参标定可以采用手眼标定算法来完成,但是,传统手眼标定算法对于运动具有一定的要求,可以证明,至少需要两个以上轴角方向不同的旋转运动才可以正确估计出外参旋转,因此,如果使用手眼标定算法标定外参,例如标定imu与激光雷达、imu与相机、多激光雷达的外参… 那么需要充分的全方位空间的旋转和平移运动,才可以成功完成标定。
但是如果机器人是处于平面运动的地面机器人呢?那么这个时候很可能很多的外参都是不可观的,准确来说,依然存在一个特殊情况,使得我们可以使用特定的算法标定出除了z轴平移外的全部参数,即其中一个传感器旋转运动时的轴角方向和它的z轴刚好平行,除此之外,也就是说如果你的传感器安装角度不满足这个条件,那么就别指望仅靠平面上运动就能完成标定。
简单来说,对于平面运动机器人的传感器外参标定,有两个结论:
1、如果其中一个传感器的旋转运动的轴角方向与其传感器坐标z轴是平行的,那么可以标定出除了z轴平移外的全部参数。
2、任意安装的两个传感器在平面运动下外参不可观。
例如,平面运动机器人中,轮速计、2d激光雷达等和车体平行安装的传感器都满足结论一的条件。下面将介绍如何通过算法求解出外参。
算法
分为两个步骤 1、先求解出旋转的pitch和roll。2、求解yaw、x,y。
step1:
首先我们知道手眼标定的旋转关系:
q R i R i + 1 ⊗ q R C = q R C ⊗ q C i C i + 1 q^{R_{i+1}} _{R_i}\otimes q^C_R=q^C_R \otimes q^{C_{i+1}}_{C_i} qRiRi+1⊗qRC=qRC⊗qCiCi+1其中R表示任何与车体水平安装的传感器(例如轮速计、2D激光…),C表示任意其他3D传感器如相机、3D激光雷达… 外参旋转为 q R C q^C_R qRC。
注意符号 q b a q^a_b qba表示a->b的旋转,即 q b a q_{ba} qba。
由上式得:
q R i R i + 1 ⊗ q R C − q R C ⊗ q C i C i + 1 = 0 = > ( Q L ( q R i R i + 1 ) − Q R ( q C i C i + 1 ) ) q R C = 0 (1) q^{R_{i+1}}_{R_i}\otimes q^C_R-q^C_R \otimes q^{C_{i+1}}_{C_i}=0 \\ =>\begin{aligned} (Q_L(q^{R_{i+1}}_{R_i})-Q_R(q^{C_{i+1}}_{C_i}))q^C_R=0 \end{aligned}\tag{1} qRiRi+1⊗qRC−qRC⊗qCiCi+1=0=>(QL(qRiRi+1)−QR(qCiCi+1))qRC=0(1)
Q L , Q R Q_L,Q_R QL,QR即四元数的左乘、右乘矩阵。
因此转换为了一个齐次线性方程组,在给定约束 ∣ ∣ q R C ∣ ∣ = 1 ||q^C_R||=1 ∣∣qRC∣∣=1下求解该方程的最小二乘解即可解得 q R C q^C_R qRC。
但是由于我们的运动被限制为平面运动,上面方程的秩为2,存在多余的零空间维度,因此无法正确求解,因此我们采用别的技巧进行处理,首先将外参旋转表示为z-y-z 欧拉角形式:
q R C = q z ( α ) q y ( β ) q z ( γ ) (2) \begin{aligned} q^C_R=q_z(\alpha)q_y(\beta)q_z(\gamma)\end{aligned}\tag{2} qRC=qz(α)qy(β)qz(γ)(2) q z ( α ) q_z(\alpha) qz(α)即绕z轴旋转 α \alpha α角度 , q y ( β ) q_y(\beta) qy(β)为绕y轴旋转 β \beta β角度。
根据轴角到四元数的转换关系 q = [ c o s α 2 , u s i n α 2 ] q=[cos\frac{\alpha}{2},usin\frac{\alpha}{2}] q=[cos2α,usin2α],可得:
q z ( α ) = [ c o s α 2 , 0 , 0 , s i n α 2 ] T q_z(\alpha)=[cos\frac{\alpha}{2},0,0,sin\frac{\alpha}{2}]^T qz(α)=[cos2α,0,0,sin2α]T q y ( β ) = [ c o s β 2 , 0 , s i n β 2 , 0 ] T q_y(\beta)=[cos\frac{\beta}{2},0,sin\frac{\beta}{2},0]^T qy(β)=[cos2β,0,sin2β,0]T
将(2)带入(1)可得:
q R i R i + 1 ⊗ q z ( α ) q y ( β ) q z ( γ ) − q z ( α ) q y ( β ) q z ( γ ) ⊗ q C i C i + 1 = 0 q^{R_{i+1}}_{R_i}\otimes q_z(\alpha)q_y(\beta)q_z(\gamma)\\-q_z(\alpha)q_y(\beta)q_z(\gamma)\otimes q^{C_{i+1}}_{C_i}=0 qRiRi+1⊗qz(α)qy(β)qz(γ)−qz(α)qy(β)qz(γ)⊗qCiCi+1=0关键来了,由于传感器R的旋转轴与z轴平行,因此可将 q R i R i + 1 q^{R_{i+1}}_{R_i} qRiRi+1和 q z ( α ) q_z(\alpha) qz(α)的顺序交换,可得下式:
δ = q z ( α ) ⊗ q R i R i + 1 q y ( β ) q z ( γ ) − q z ( α ) q y ( β ) q z ( γ ) ⊗ q C i C i + 1 = q z ( α ) ( q R i R i + 1 q y ( β ) q z ( γ ) − q y ( β ) q z ( γ ) q C i C i + 1 ) \delta =q_z(\alpha) \otimes q^{R_{i+1}}_{R_i} q_y(\beta)q_z(\gamma)\\-q_z(\alpha)q_y(\beta)q_z(\gamma)\otimes q^{C_{i+1}}_{C_i}\\=q_z(\alpha)(q^{R_{i+1}}_{R_i} q_y(\beta)q_z(\gamma)-q_y(\beta)q_z(\gamma)q^{C_{i+1}}_{C_i}) δ=qz(α)⊗qRiRi+1qy(β)qz(γ)−qz(α)qy(β)qz(γ)⊗qCiCi+1=qz(α)(qRiRi+1qy(β)qz(γ)−qy(β)qz(γ)qCiCi+1)
显然,
q R i R i + 1 q y ( β ) q z ( γ ) − q y ( β ) q z ( γ ) q C i C i + 1 = 0 q^{R_{i+1}}_{R_i} q_y(\beta)q_z(\gamma)-q_y(\beta)q_z(\gamma)q^{C_{i+1}}_{C_i}=0 qRiRi+1qy(β)qz(γ)−qy(β)qz(γ)qCiCi+1=0
将 q y ( β ) q z ( γ ) q_y(\beta)q_z(\gamma) qy(β)qz(γ)记为 q Y Z q_{YZ} qYZ,
q Y Z = [ c o s ( β 2 ) c o s ( γ 2 ) s i n ( β 2 ) s i n ( γ 2 ) s i n ( β 2 ) c o s ( γ 2 ) c o s ( β 2 ) s i n ( γ 2 ) ] (3) \begin{aligned} q_{YZ}=\begin{bmatrix} cos(\frac{\beta}{2})cos(\frac{\gamma}{2})\\sin(\frac{\beta}{2})sin(\frac{\gamma}{2}) \\ sin(\frac{\beta}{2})cos(\frac{\gamma}{2})\\cos(\frac{\beta}{2})sin(\frac{\gamma}{2})\end{bmatrix}\end{aligned} \tag{3} qYZ= cos(2β)cos(2γ)sin(2β)sin(2γ)sin(2β)cos(2γ)cos(2β)sin(2γ) (3)
于是,这个问题转换为一个求解 q Y Z q_{YZ} qYZ的最小二乘问题:
q Y Z = arg min q Y Z ∣ ∣ M q Y Z ∣ ∣ 2 M = [ L ( q R i R i + 1 ) − R ( q C i C i + 1 ) . . L ( q R 0 R 1 ) − R ( q C 0 C 1 ) ] q_{YZ}=\argmin \limits_{q_{YZ}}||Mq_{YZ}||^2\\ M=\begin{bmatrix} L(q^{R_{i+1}}_{R_i})-R(q^{C_{i+1}}_{C_i}) \\ .\\.\\L(q^{R_{1}}_{R_0})-R(q^{C_{1}}_{C_0})\end{bmatrix} qYZ=qYZargmin∣∣MqYZ∣∣2M= L(qRiRi+1)−R(qCiCi+1)..L(qR0R1)−R(qC0C1)
可以证明,这个矩阵M的秩为2,证明过程见文献【2】,因此,上述最小二乘解的零空间维度为2,因此我们需要继续寻找约束,根据(3)式可知: q Y Z 1 q Y Z 2 = q Y Z 3 q Y Z 4 q_{YZ1}q_{YZ2}=q_{YZ3}q_{YZ4} qYZ1qYZ2=qYZ3qYZ4另外表示旋转的四元数都是单位四元数: ∣ ∣ q Y Z ∣ ∣ 2 = 1 ||q_{YZ}||_2=1 ∣∣qYZ∣∣2=1对于上述齐次线性最小二乘问题,其解为 M T M M^TM MTM最小特征值对应的特征向量,因为M的秩为2,因此有两个为0的最小特征值,这两个0特征值对应的两个线性无关的特征向量记为 t 1 , t 2 t_1,t_2 t1,t2,它们构成了零空间的一组基(实对称矩阵必能对角化,有n个相同的特征值必然存在n个不相关的特征向量),因此解可以表示为: q Y Z = a t 1 + b t 2 q_{YZ}=at_1+bt_2 qYZ=at1+bt2根据上面给出的两个约束即可以求解出 a , b a,b a,b。
需要注意的是,由于噪声影响, M T M M^TM MTM最终是满秩的,并不会有两个真正为0的特征值,因此只需要取2个最小的特征值对应的特征向量即可。
step2求解yaw,x,y
根据手眼标定,有关系:
( R ( q R i R i + 1 ) − I ) p R C − R Z ( α ) R ( q Y Z ) p C i C i + 1 + p R i R i + 1 = 0 (R(q^{R_{i+1}}_{R_i})-I)p^C_R-R_Z(\alpha)R(q_{YZ})p^{C_{i+1}}_{C_i}+p^{R_{i+1}}_{R_i}=0 (R(qRiRi+1)−I)pRC−RZ(α)R(qYZ)pCiCi+1+pRiRi+1=0其中, q Y Z q_{YZ} qYZ即step1求解的结果, R Z ( α ) R_Z(\alpha) RZ(α)即外参旋转待求的一部分, p R C p^C_R pRC为待求外参平移。
由于外参平移中,z发生变化时传感器的运动观测保持不变 ,因此z方向的平移是不可观的,因此将外参平移z设为0,并丢弃上式第3行,
R ( q Y Z ) p C i C i + 1 R(q_{YZ})p^{C_{i+1}}_{C_i} R(qYZ)pCiCi+1即将传感器C的运动投影到运动平面,令: R ( q Y Z ) p C i C i + 1 = [ p i 1 p i 2 p i 3 ] R(q_{YZ})p^{C_{i+1}}_{C_i}=\begin{bmatrix}p_{i_1}\\p_{i_2}\\p_{i_3}\end{bmatrix} R(qYZ)pCiCi+1= pi1pi2pi3
带入上式并忽略第3行,可得: ( R ( q R i R i + 1 ) − I ) 2 × 2 [ p x p y ] − [ c o s α − s i n α s i n α c o s α ] [ p i 1 p i 2 ] + p R i R i + 1 = 0 (R(q^{R_{i+1}}_{R_i})-I)_{2\times2}\begin{bmatrix}p_x\\p_y\end{bmatrix}-\\\begin{bmatrix}cos\alpha&-sin\alpha \\ sin\alpha & cos\alpha \end{bmatrix}\begin{bmatrix} p_{i_1}\\ p_{i_2}\end{bmatrix}+p^{R_{i+1}}_{R_i}=0 (R(qRiRi+1)−I)2×2[pxpy]−[cosαsinα−sinαcosα][pi1pi2]+pRiRi+1=0
使用最小二乘法即可解得 p x , p y , α p_x,p_y,\alpha px,py,α,具体细节见参考文献【2】。
reference:
[1] 标定系列一 | 机器人手眼标定的基础理论分析 https://zhuanlan.zhihu.com/p/93183788?utm_psn=1706381723099791360
[2] An Analytical Least-Squares Solution to the Odometer-Camera Extrinsic Calibration Problem
相关文章:

平面运动机器人的传感器外参标定
简述 对任意两个传感器进行外参标定可以采用手眼标定算法来完成,但是,传统手眼标定算法对于运动具有一定的要求,可以证明,至少需要两个以上轴角方向不同的旋转运动才可以正确估计出外参旋转,因此,如果使用…...
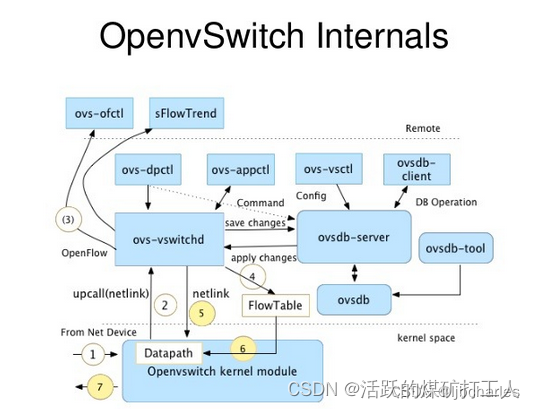
【星海随笔】SDN neutron (二) Neutron-plugin(ML2)
Neutron架构之Neutron-plugin Core-plugin(ML2)篇 Neutron-server接收两种请求: REST API请求:接收REST API请求,并将REST API分发到对应的Plugin(L3RouterPlugin)。 RPC请求:接收Plugin agent请求&#…...

野火i.MX6ULL开发板检测按键evtest(Linux应用开发)
之前一直查找不到evtest,因为没有下载成功,很可能是网络不好,下次可以软件源可以换成国内大学镜像网站。 重新断开板子电源启动,再次连接网络,下载evtest成功!!...

k8s存储
nfs 理论上nfs 其实并不是存储设备,它是一种远程共享存储服务。 k8s 存储卷 volume emptyDir:可以实现pod中的容器之间共享数据, 但是存储卷不能持久化数据,且会随着pod的生命周期一起删除。 hostpash:可以实现持久…...
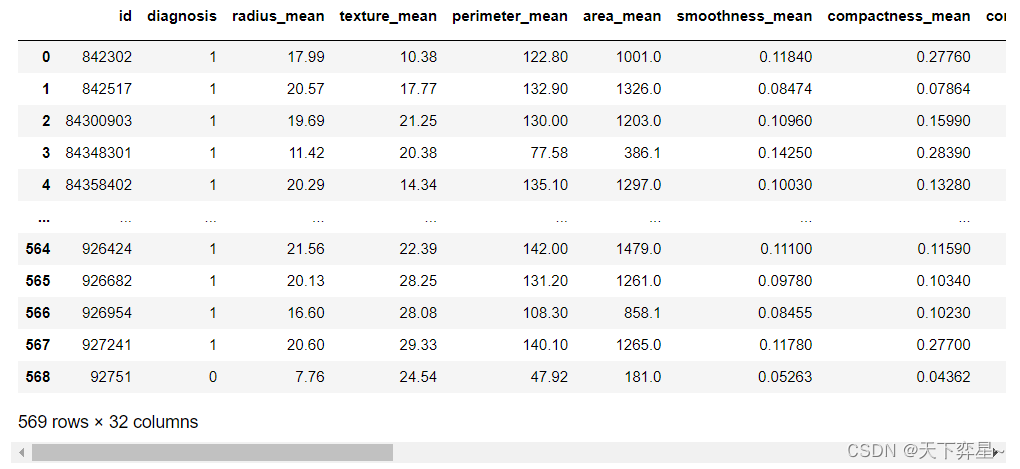
数据分析实战 | 贝叶斯分类算法——病例自动诊断分析
目录 一、数据及分析对象 二、目的及分析任务 三、方法及工具 四、数据读入 五、数据理解 六、数据准备 七、模型训练 八、模型评价 九、模型调参 十、模型预测 一、数据及分析对象 CSV文件——“bc_data.csv” 数据集链接:https://download.csdn.net/d…...
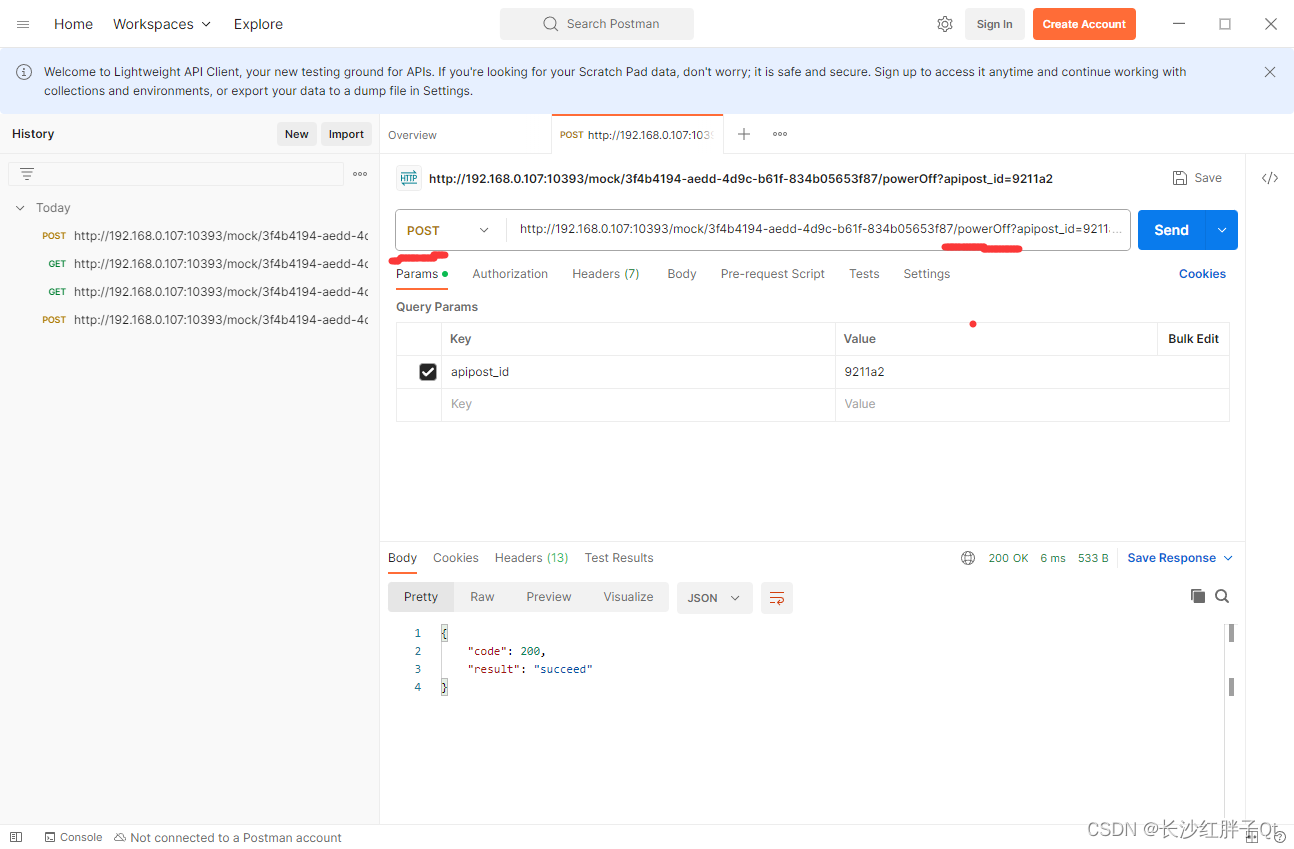
实用技巧:嵌入式人员使用http服务模拟工具模拟http服务器测试客户端get和post请求
文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/134305752 红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结…...

P9836 种树
容易想到分解因数。 对于一个数 p p p 的因数个数,假设它可以被分解质因数成 a 1 i 1 a 2 i 2 a 3 i 3 ⋯ a k c k a_1^{i_1} a_2^{i_2} a_3^{i_3}\cdots a_k^{c_k} a1i1a2i2a3i3⋯akck 的形式,则其因数个数为 ( i 1 1 ) ( i 2 1 )…...
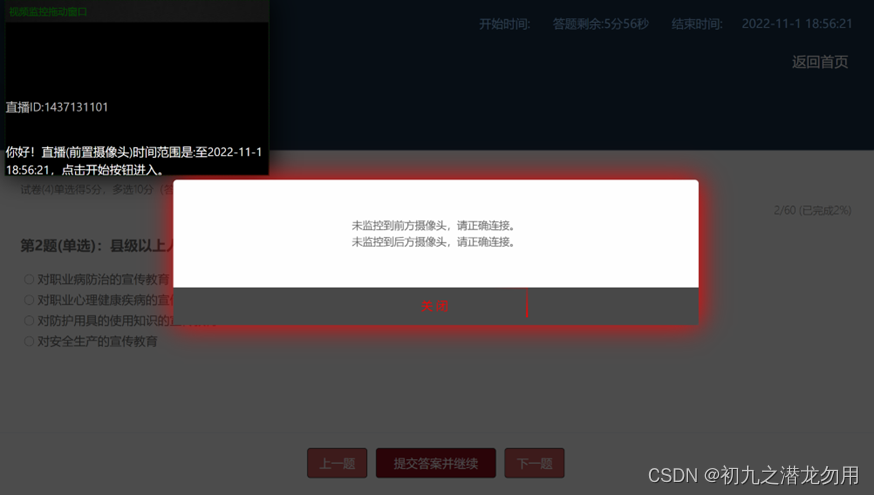
C# 查询腾讯云直播流是否存在的API实现
应用场景 在云考试中,为防止作弊行为的发生,会在考生端部署音视频监控系统,当然还有考官方监控墙系统。在实际应用中,考生一方至少包括两路直播流: (1)前置摄像头:答题的设备要求使…...
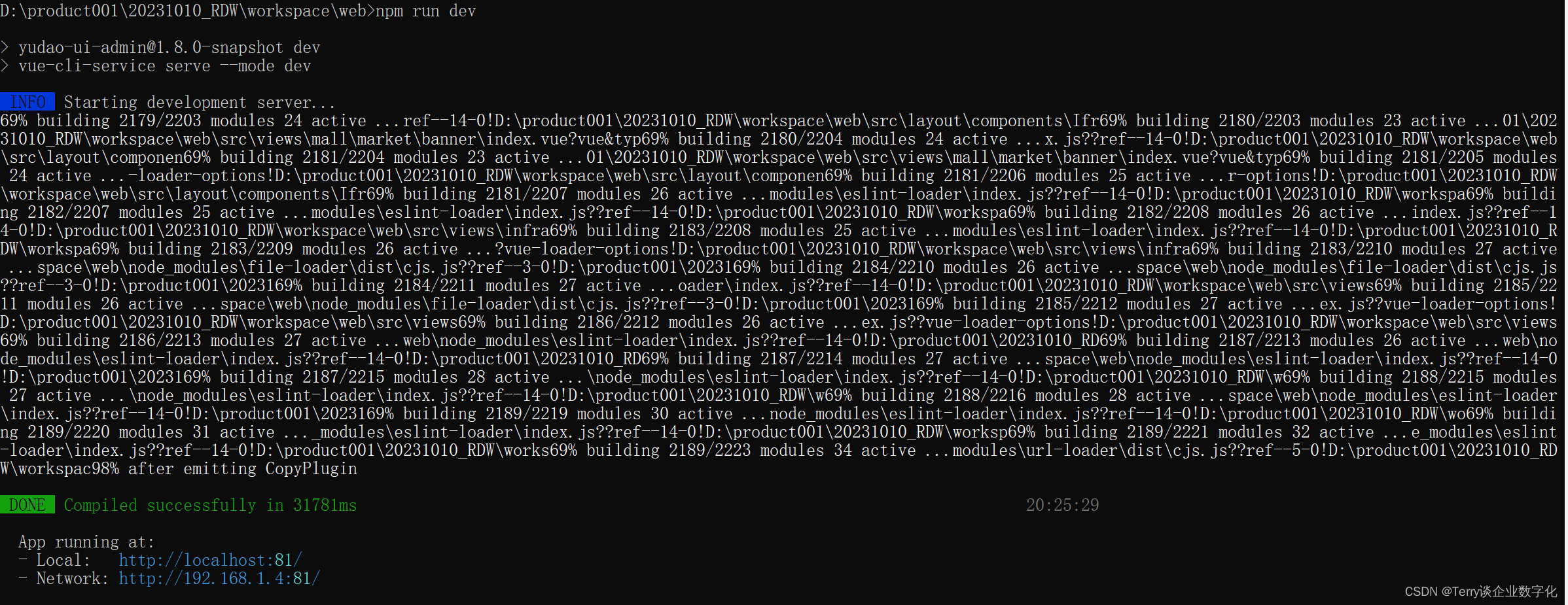
JAVA开源项目 于道前端项目 启动步骤参考
1. 安装 启动过程有9个步骤: 1.1 安装 Node JS , V18版本的 (安装步骤省略) 1.2 安装 npm install -g yarn ,node JS里边好像自带npm ,通过npm的命令安装 yarn 1.3 切换到项目中去安装,npm install &a…...
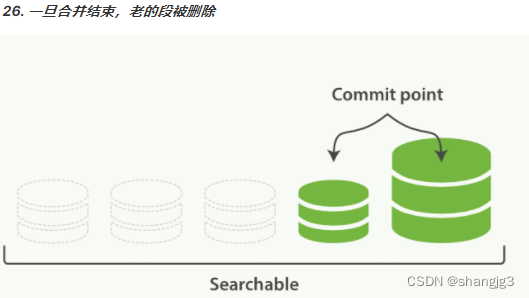
深入理解ElasticSearch分片
1. 路由计算 当索引一个文档的时候,文档会被存储到一个主分片中。 Elasticsearch 如何知道一个文档应该存放到哪个分片中呢?当我们创建文档时,它如何决定这个文档应当被存储在分片 1 还是分片 2 中呢?首先这肯定不会是随机的&…...
【Python】AppUI自动化—appium自动化元素定位、元素事件操作(17)下
文章目录 前言一.Appium 元素定位1.定位方式种类2.如何定位2.1 id定位2.2 className定位2.3 content-desc 定位2.4 Android Uiautomator定位4.1 text定位4.2 text模糊定位4.3 text正则匹配定位4.4 resourceId定位4.5 resourceId正则匹配定位4.6 className定位4.7 className正则…...

SpringBoot使用MyBatis多数据源
SpringBoot使用MyBatis多数据源 我们以 Mybatis Xml和注解两种版本为例,给大家展示如何如何配置多数据源。 1、注解方式 数据库文件: DROP TABLE IF EXISTS users; CREATE TABLE users (id bigint(20) NOT NULL AUTO_INCREMENT COMMENT 主键id,userN…...

小程序版本审核未通过,需在开发者后台「版本管理—提交审核——小程序订单中心path」设置订单中心页path,请设置后再提交代码审核
小程序版本审核未通过,需在开发者后台「版本管理—提交审核——小程序订单中心path」设置订单中心页path,请设置后再提交代码审核 因小程序尚未发布,订单中心不能正常打开查看,请先发布小程序后再提交订单中心PATH申请 初次提交…...
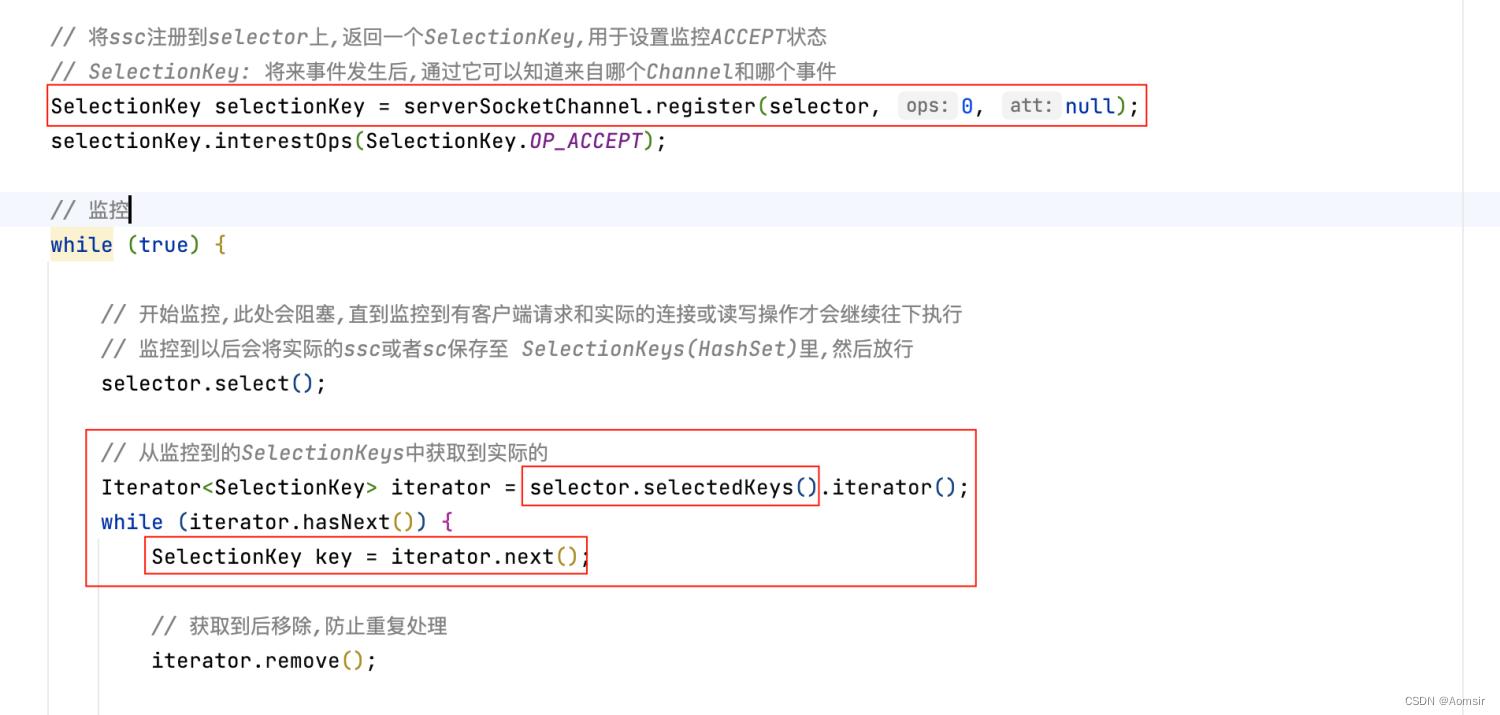
Netty入门指南之NIO Selector监管
作者简介:☕️大家好,我是Aomsir,一个爱折腾的开发者! 个人主页:Aomsir_Spring5应用专栏,Netty应用专栏,RPC应用专栏-CSDN博客 当前专栏:Netty应用专栏_Aomsir的博客-CSDN博客 文章目录 参考文献前言问题解…...
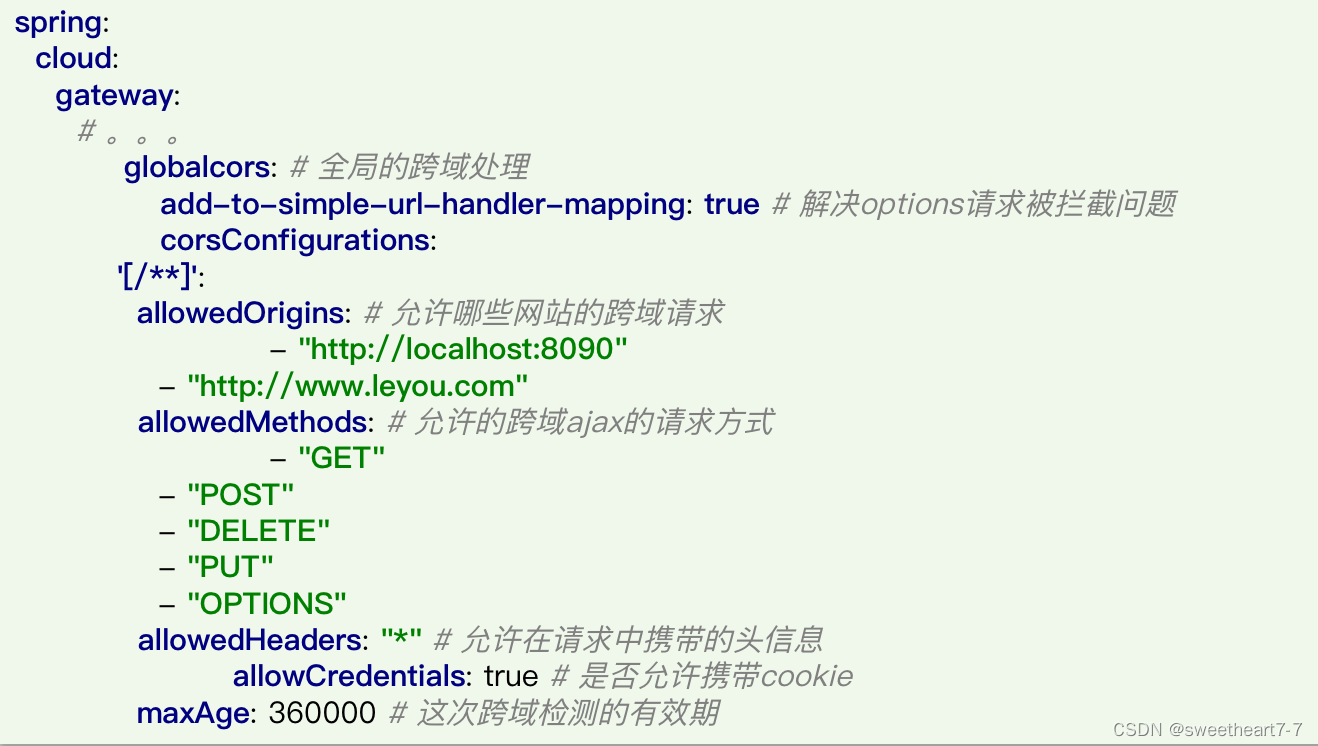
Spring Cloud学习(六)【统一网关 Gateway】
文章目录 网关的功能搭建网关服务路由断言工厂Route Predicate Factory路由过滤器 GatewayFilter过滤器执行顺序跨域问题处理 网关的功能 网关功能: 身份认证和权限校验服务路由、负载均衡请求限流 在SpringCloud中网关的实现包括两种: gatewayzuul …...

基于单片机的空调智能控制器的设计
**单片机设计介绍,基于单片机的空调智能控制器的设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 基于单片机的空调智能控制器需要具备输入输出端口、定时器、计数器等模块,以便对空调进行精确控制。下…...
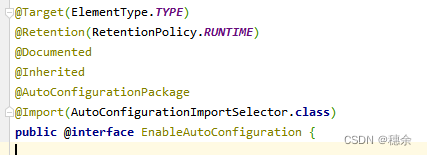
Spring Boot自动配置原理、实战、手撕自动装配源码
Spring Boot自动配置原理 相比较于传统的 Spring 应用,搭建一个 SpringBoot 应用,我们只需要引入一个注解 SpringBootApplication,就可以成功运行。 前面四个不用说,是定义一个注解所必须的,关键就在于后面三个注解&a…...

111111111111111
全局锁 就是对整个数据库进行加锁,加锁之后整个数据库就处于只读状态,后续的DML写语句,DDL语句,以及对更新事务的提交操作都会被阻塞,典型地使用场景就是做整个数据库的逻辑备份,对所有的表进行锁定&#x…...
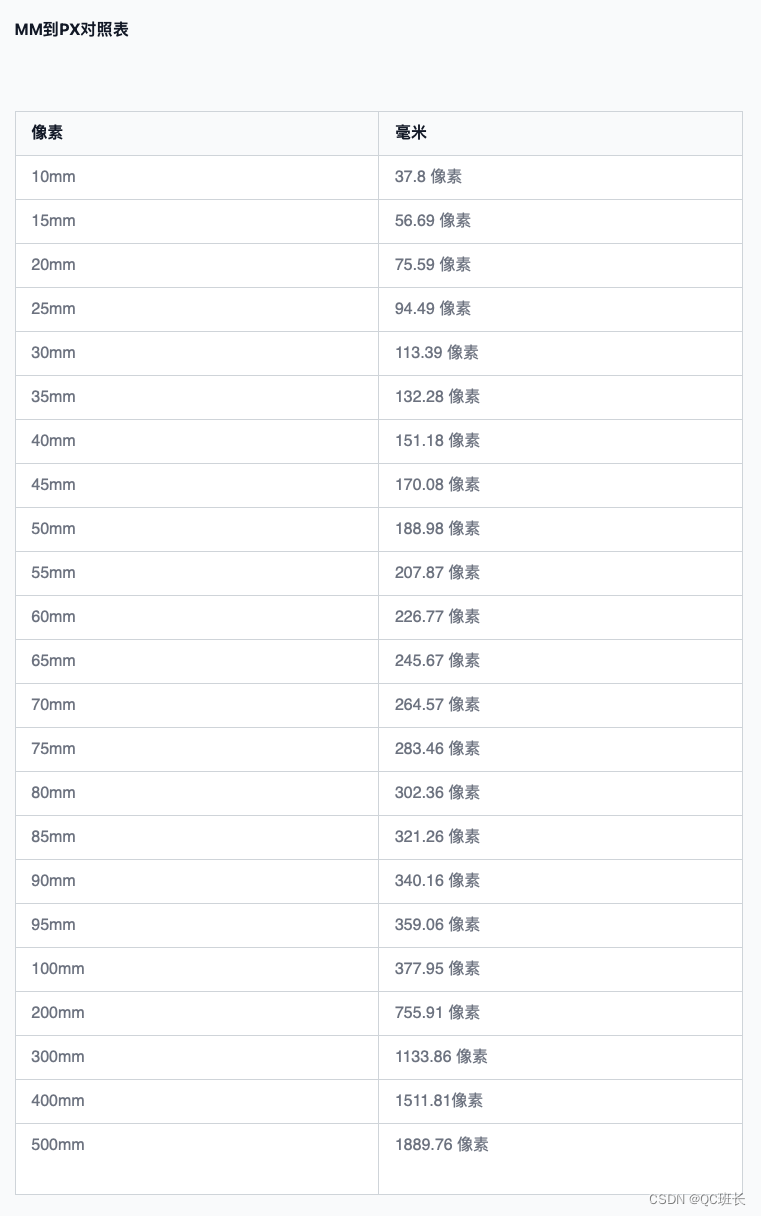
React动态生成二维码和毫米(mm)单位转像素(px)单位
一、使用qrcode.react生成二维码,qrcode.react - npm 很简单,安装依赖包,然后引用就行了 npm install qrcode.react或者 yarn add qrcode.react直接上写好的代码 import React, {useEffect, useState} from react; import QRCode from qr…...
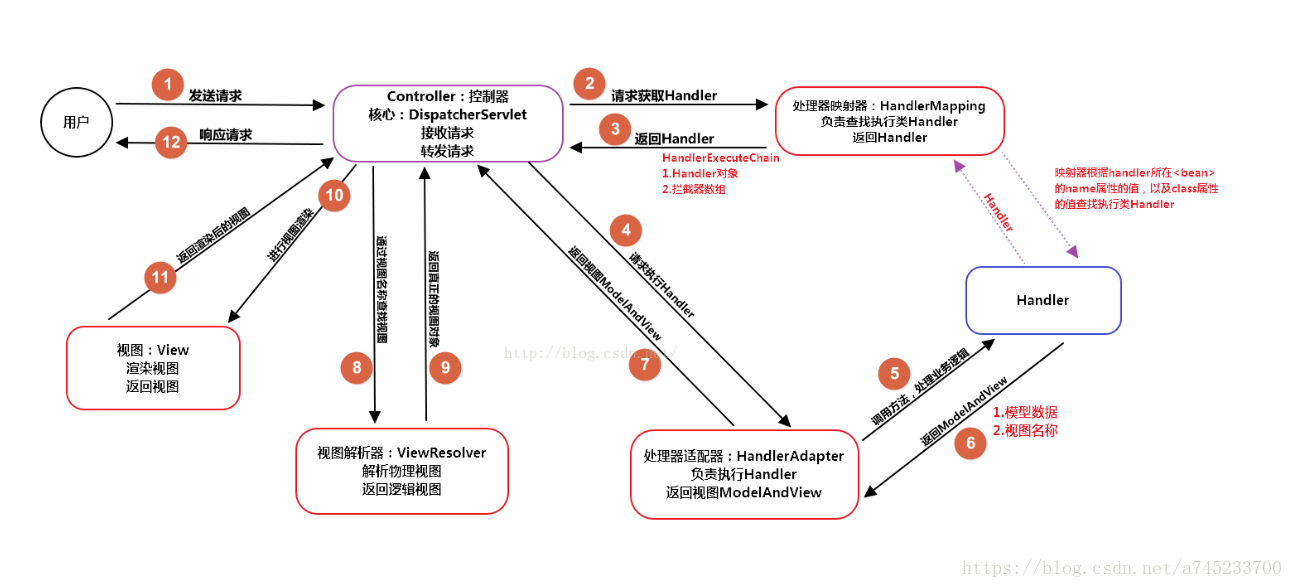
SpringMvc 常见面试题
1、SpringMvc概述 1.1、什么是Spring MVC ?简单介绍下你对springMVC的理解? Spring MVC是一个基于Java的实现了MVC设计模式的请求驱动类型的轻量级Web框架,通过把Model,View,Controller分离,将web层进行职责解耦&am…...

基于X11的机器人图形界面远程调试实战指南
1. 为什么需要X11远程调试机器人图形界面 做机器人开发的朋友们应该都遇到过这样的场景:你正坐在工位上调试代码,突然需要查看机器人上rviz的可视化效果。这时候常规操作是跑过去接显示器,或者用远程桌面连上去看。但前者太麻烦,后…...
)
海康VisionMaster从安装到跑通,我踩过的那些坑(附详细排查清单)
海康VisionMaster实战避坑指南:从安装崩溃到流程调通的全记录 作为一名刚接触机器视觉的工程师,第一次打开海康VisionMaster时,我以为这不过是又一个"下一步"就能搞定的软件。直到连续三天深夜对着报错弹窗抓狂,才明白…...

Qwen3-Reranker-0.6B效果展示:低资源语言检索能力验证
Qwen3-Reranker-0.6B效果展示:低资源语言检索能力验证 1. 引言 在信息检索领域,低资源语言的文本检索一直是个棘手的问题。传统检索模型往往在英语等主流语言上表现优异,但遇到小语种时效果就会大打折扣。最近发布的Qwen3-Reranker-0.6B模型…...

AIAgent感知模块如何实现毫秒级环境响应:3层异构感知融合架构实战拆解
第一章:AIAgent感知模块设计概览 2026奇点智能技术大会(https://ml-summit.org) AI Agent的感知模块是其与物理世界或数字环境建立认知联结的第一道接口,承担着多源异构信号采集、语义对齐、实时上下文建模与可信度评估等核心职责。该模块并非传统意义上…...

基于Git版本管理的CasRel模型迭代实验记录规范
基于Git版本管理的CasRel模型迭代实验记录规范 做机器学习项目,尤其是像CasRel这样的关系抽取模型,最头疼的往往不是调参本身,而是实验管理。今天调了个学习率,明天改了下网络结构,后天又换了预处理方式。过了一周&am…...

2025届必备的六大AI写作网站推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 作为大语言模型的DeepSeek,在学术论文写作里能够发挥多重辅助功能,在…...

层次化文本分类:利用文档结构与类别树提升分类性能
点击 “AladdinEdu,你的AI学习实践工作坊”,注册即送-H卡级别算力,沉浸式云原生集成开发环境,80G大显存多卡并行,按量弹性计费,教育用户更享超低价。 1. 引言:当分类问题有了“上下级” 传统的…...

**RISC-V生态下的轻量级RTOS移植实战:从零开始构建嵌入式系统核心**在当前国产化
RISC-V生态下的轻量级RTOS移植实战:从零开始构建嵌入式系统核心 在当前国产化替代浪潮中,RISC-V架构凭借其开源、灵活、可定制等优势迅速崛起,成为嵌入式开发领域的热点方向。本文将深入探讨如何在RISC-V平台上移植一个轻量级实时操作系统&am…...

JavaScript跨平台OCR引擎:Tesseract.js实现浏览器与Node.js图像文字识别
JavaScript跨平台OCR引擎:Tesseract.js实现浏览器与Node.js图像文字识别 【免费下载链接】tesseract.js Pure Javascript OCR for more than 100 Languages 📖🎉🖥 项目地址: https://gitcode.com/gh_mirrors/te/tesseract.js …...

微型循环氩气金属气雾化制粉设备性价比高服务商
在材料科学的星辰大海中,金属粉末制备是通往3D打印、粉末冶金等前沿领域的基石。然而,对于无数高校课题组和中小型研发企业而言,这块“基石”却重若千钧——动辄三层楼高、耗气如流水、价格动辄百万的传统高压气雾化设备,如同一道…...