Rt-Thread 移植6--多线程(KF32)
6.1 就绪列表
6.1.1 线程就绪优先级组
线程优先级表的索引对应的线程的优先级。

为了快速的找到线程在线程优先级表的插入和移出的位置,RT-Thread专门设计了一个线程就绪优先级组。线程就绪优先组是一个32位的整型数,每一个位对应一个优先级,最多表示32个优先级
rt_uint32_t rt_thread_ready_priority_group;

6.1.2 寻找优先级最高的线程
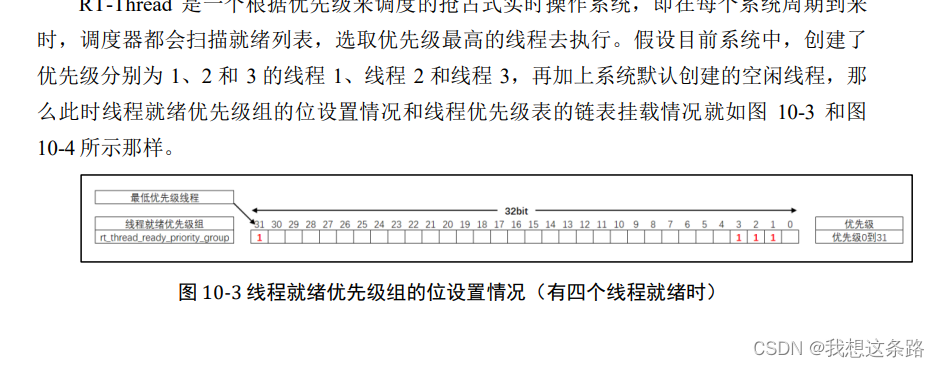
从图中看出,第一个置1的位是位1,即表示此时就绪的线程当中,优先级最高的线程1,然后调度器从线程优先级表的索引1下去除线程1的线程控制块,从而切换到线程1.
kservice.c中
const rt_uint8_t __lowest_bit_bitmap[] =
{/* 00 */ 0, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 10 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 20 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 30 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 40 */ 6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 50 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 60 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 70 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 80 */ 7, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* 90 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* A0 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* B0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* C0 */ 6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* D0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* E0 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,/* F0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0
};/*** This function finds the first bit set (beginning with the least significant bit)* in value and return the index of that bit.** Bits are numbered starting at 1 (the least significant bit). A return value of* zero from any of these functions means that the argument was zero.** @return return the index of the first bit set. If value is 0, then this function* shall return 0.*/
int __rt_ffs(int value)
{if (value == 0) return 0;if (value & 0xff)return __lowest_bit_bitmap[value & 0xff] + 1;if (value & 0xff00)return __lowest_bit_bitmap[(value & 0xff00) >> 8] + 9;if (value & 0xff0000)return __lowest_bit_bitmap[(value & 0xff0000) >> 16] + 17;return __lowest_bit_bitmap[(value & 0xff000000) >> 24] + 25;
}
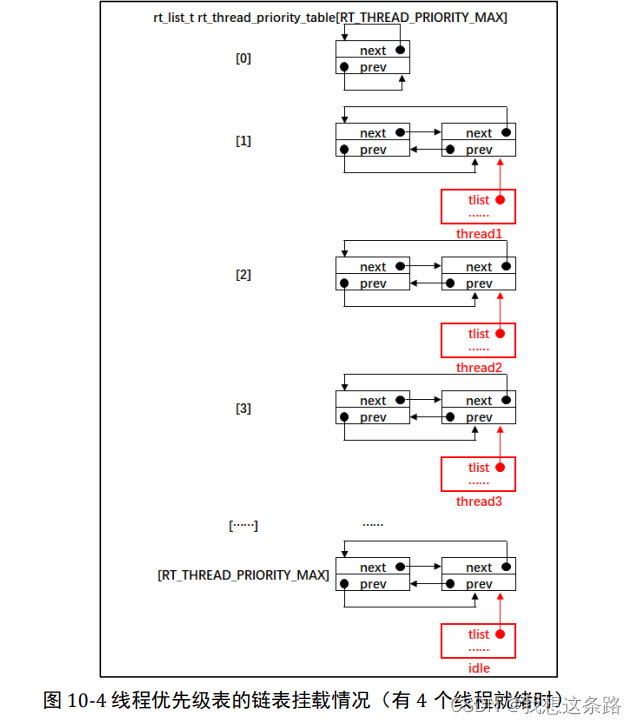
6.1.3 线程优先级表
scheduler.c
rt_list_t rt_thread_priority_table[RT_THREAD_PRIORITY_MAX];
将线程插入到线程优先级表和移出分别由scheduler.c的rt_schedule_insert_thread()和rt_schedule_remove_thread()这两个函数实现。
void rt_schedule_insert_thread(struct rt_thread *thread)
{register rt_base_t temp;/* disable interrupt */temp = rt_hw_interrupt_disable();/* change stat */thread->stat = RT_THREAD_READY | (thread->stat & ~RT_THREAD_STAT_MASK);/* insert thread to ready list */rt_list_insert_before(&(rt_thread_priority_table[thread->current_priority]),&(thread->tlist));/* set priority mask */#if RT_THREAD_PRIORITY_MAX > 32rt_thread_ready_table[thread->number] |= thread->high_mask;
#endifrt_thread_ready_priority_group |= thread->number_mask;P_DBG("insert thread %x grout %x\n",thread,rt_thread_ready_priority_group);/* enable interrupt */rt_hw_interrupt_enable(temp);
}/** This function will remove a thread from system ready queue.** @param thread the thread to be removed** @note Please do not invoke this function in user application.*/
void rt_schedule_remove_thread(struct rt_thread *thread)
{register rt_base_t temp;/* disable interrupt */temp = rt_hw_interrupt_disable();/* remove thread from ready list */rt_list_remove(&(thread->tlist));if (rt_list_isempty(&(rt_thread_priority_table[thread->current_priority]))){rt_thread_ready_priority_group &= ~thread->number_mask;}/* enable interrupt */rt_hw_interrupt_enable(temp);
}6.2 修改代码
6.2.1 修改线程控制块
struct rt_thread
{char name[RT_NAME_MAX];rt_uint8_t type;rt_uint8_t flag;rt_list_t list;void *sp; /* 线程栈指针 */void *entry; /* 线程入口地址 */void *parameter; /* 线程形参 */ void *stack_addr; /* 线程起始地址 */rt_uint32_t stack_size; /* 线程栈大小,单位为字节 */rt_list_t tlist; /* 线程链表节点 */
#if TEST_USE_TICK_ENABLErt_ubase_t init_tick;rt_ubase_t remaining_tick;
#endif**rt_uint8_t current_priority;rt_uint8_t init_priority;rt_uint32_t number_mask;rt_err_t error;rt_uint8_t stat;**};
rtdef.h中定义错误码
#define RT_EOK 0 /**< There is no error */
#define RT_ERROR 1 /**< A generic error happens */
#define RT_ETIMEOUT 2 /**< Timed out */
#define RT_EFULL 3 /**< The resource is full */
#define RT_EEMPTY 4 /**< The resource is empty */
#define RT_ENOMEM 5 /**< No memory */
#define RT_ENOSYS 6 /**< No system */
#define RT_EBUSY 7 /**< Busy */
#define RT_EIO 8 /**< IO error */
#define RT_EINTR 9 /**< Interrupted system call */
#define RT_EINVAL 10 /**< Invalid argument */定义线程状态
#define RT_THREAD_INIT 0x00 /**< Initialized status */
#define RT_THREAD_READY 0x01 /**< Ready status */
#define RT_THREAD_SUSPEND 0x02 /**< Suspend status */
#define RT_THREAD_RUNNING 0x03 /**< Running status */
#define RT_THREAD_BLOCK RT_THREAD_SUSPEND /**< Blocked status */
#define RT_THREAD_CLOSE 0x04 /**< Closed status */
#define RT_THREAD_STAT_MASK 0x0f
修改rt_system_scheduler_init()
void rt_system_scheduler_init(void)
{register rt_base_t offset;for(offset = 0; offset < RT_THREAD_PRIORITY_MAX;offset++){rt_list_init(&rt_thread_priority_table[offset]);}rt_current_priority = RT_THREAD_PRIORITY_MAX - 1;rt_current_thread = RT_NULL;rt_thread_ready_priority_group = 0;/* 初始化线程休眠列表,当线程创建好没有启动之前会被放入到这个列表 */}
6.2.3 修改线程初始化函数rt_thread_init()
rt_err_t rt_thread_init(struct rt_thread *thread,const char *name,void (*entry)(void *parameter),void *parameter,void *stack_start,rt_uint32_t stack_size,**rt_uint8_t priority**)
{rt_object_init((rt_object_t)thread,RT_Object_Class_Thread,name);rt_list_init(&(thread->tlist));thread->entry = (void *)entry;thread->parameter = parameter;thread->stack_addr = stack_start;thread->stack_size = stack_size;/* 初始化线程栈,并返回线程栈指针 */thread->sp = (void *)rt_hw_stack_init( thread->entry,thread->parameter,(void *)((char *)thread->stack_addr + thread->stack_size - 4) );**thread->init_priority = priority;thread->current_priority = priority;thread->number_mask = 0;thread->error = RT_EOK;thread->stat = RT_THREAD_INIT;**}
6.2.4 添加线程启动函数rt_thread_startup()
rt_err_t rt_thread_startup(rt_thread_t thread)
{thread->current_priority = thread->init_priority;thread->number_mask = 1L << thread->current_priority;thread->stat = RT_THREAD_SUSPEND;rt_thread_resume(thread);if(rt_thread_self() != RT_NULL){rt_schedule();}
}
rt_err_t rt_thread_resume(rt_thread_t thread)
{register rt_base_t temp;if((thread->stat & RT_THREAD_STAT_MASK) != RT_THREAD_SUSPEND){return -RT_ERROR;}temp = rt_hw_interrupt_disable();rt_list_remove(&(thread->tlist));rt_hw_interrupt_enable(temp);rt_schedule_insert_thread(thread);
}
6.2.5 修改空闲线程初始化函数rt_thread_idle_init()
void rt_thread_idle_init(void)
{rt_thread_init(&idle,"idle",rt_thread_idle_entry,RT_NULL,&rt_thread_stack[0],sizeof(rt_thread_stack),RT_THREAD_PRIORITY_MAX - 1);**rt_thread_startup(&idle);**}6.2.6 修改启动系统调度器函数rt_system_scheduler_start()
不再是手动指定第一个需要运行的线程,而是根据优先级来决定第一个运行的线程。
void rt_system_scheduler_start(void)
{register struct rt_thread *to_thread;register rt_ubase_t highest_ready_priority;highest_ready_priority = __rt_ffs(rt_thread_ready_priority_group)-1;P_DBG("first start pri %d\n",highest_ready_priority);to_thread = rt_list_entry(rt_thread_priority_table[highest_ready_priority].next,struct rt_thread,tlist);rt_current_thread = to_thread;rt_hw_context_switch_to((rt_uint32_t)&to_thread->sp);}
6.2.7 修改系统调度函数rt_schedule()
根据优先级来实现
void rt_schedule(void)
{register rt_base_t temp;rt_base_t level;register rt_ubase_t highest_ready_priority;struct rt_thread *to_thread;struct rt_thread *from_thread;temp = rt_hw_interrupt_disable();highest_ready_priority = __rt_ffs(rt_thread_ready_priority_group)-1;P_DBG("read pri %d\n",highest_ready_priority);to_thread = rt_list_entry(rt_thread_priority_table[highest_ready_priority].next,struct rt_thread,tlist);P_DBG("read tgread %x\n",to_thread);if(to_thread != rt_current_thread){P_DBG("!= current thread %x\n",rt_current_thread);rt_current_priority = (rt_uint8_t) highest_ready_priority;from_thread = rt_current_thread;rt_current_thread = to_thread;rt_hw_context_switch((rt_uint32_t)&from_thread->sp,(rt_uint32_t)&to_thread->sp);rt_hw_interrupt_enable(temp);}else{rt_hw_interrupt_enable(temp);}/* 产生上下文切换 */}6.2.8 修改线程阻塞函数
void rt_thread_delay(rt_tick_t tick)
{register rt_base_t temp;struct rt_thread *thread;temp = rt_hw_interrupt_disable(); thread = rt_current_thread;thread->remaining_tick = tick;thread->stat = RT_THREAD_SUSPEND; rt_thread_ready_priority_group &= ~thread->number_mask;rt_hw_interrupt_enable(temp);rt_schedule();
}6.2.9 修改时基更i新函数rt_tick_increase()
void rt_tick_increase(void)
{rt_ubase_t i;struct rt_thread *thread;rt_tick++;for(i = 0;i < RT_THREAD_PRIORITY_MAX;i++){thread = rt_list_entry(rt_thread_priority_table[i].next,struct rt_thread,tlist);if(thread->remaining_tick > 0){thread->remaining_tick--;if(thread->remaining_tick == 0){rt_thread_ready_priority_group |= thread->number_mask;}}rt_schedule();}
}6.3 main.c
/* 初始化线程 */rt_thread_init( &rt_flag1_thread, "flag1", /* 线程控制块 */flag1_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag1_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag1_thread_stack),3 ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 *///rt_list_insert_before( &(rt_thread_priority_table[0]),&(rt_flag1_thread.tlist) );P_DBG("thread flag1 %x timer %s\n",&rt_flag1_thread,rt_flag1_thread.thread_timer.parent.name);rt_thread_startup(&rt_flag1_thread);/* 初始化线程 */rt_thread_init( &rt_flag2_thread, "falg2", /* 线程控制块 */flag2_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag2_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag2_thread_stack),4 ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */P_DBG("thread flag1 %x timer %s\n",&rt_flag2_thread,rt_flag2_thread.thread_timer.parent.name);//rt_list_insert_before( &(rt_thread_priority_table[1]),&(rt_flag2_thread.tlist) );rt_thread_startup(&rt_flag2_thread);/* 启动系统调度器 */rt_system_scheduler_start();/* 线程1 */
void flag1_thread_entry( void *p_arg )
{for( ;; ){P_DBG("flag1 thread\n");flag2 = 1;P_DBG("flag1 thread will dela1\n");rt_thread_delay(10);flag2 = 0;P_DBG("flag1 thread will dela2\n");rt_thread_delay(10);}
}/* 线程2 */
void flag2_thread_entry( void *p_arg )
{for( ;; ){P_DBG("flag2 thread\n");flag2 = 1;rt_thread_delay(2);flag2 = 0;P_DBG("flag2 thread will dela1\n");rt_thread_delay(2);}
}
相关文章:
Rt-Thread 移植6--多线程(KF32)
6.1 就绪列表 6.1.1 线程就绪优先级组 线程优先级表的索引对应的线程的优先级。 为了快速的找到线程在线程优先级表的插入和移出的位置,RT-Thread专门设计了一个线程就绪优先级组。线程就绪优先组是一个32位的整型数,每一个位对应一个优先级ÿ…...

HarmonyOS应用开发-首选项与后台通知管理
首选项 在移动互联网蓬勃发展的今天,移动应用给我们生活带来了极大的便利,这些便利的本质在于数据的互联互通。因此在应用的开发中数据存储占据了非常重要的位置,HarmonyOS应用开发也不例外。本章以HarmonyOS的首选项为例,介绍了…...
通过easyexcel导出数据到excel表格
这篇文章简单介绍一下怎么通过easyexcel做数据的导出,使用之前easyui构建的歌曲列表crud应用,添加一个导出按钮,点击的时候直接连接后端接口地址,在后端的接口完成数据的导出功能。 前端页面完整代码 let editingId; let request…...
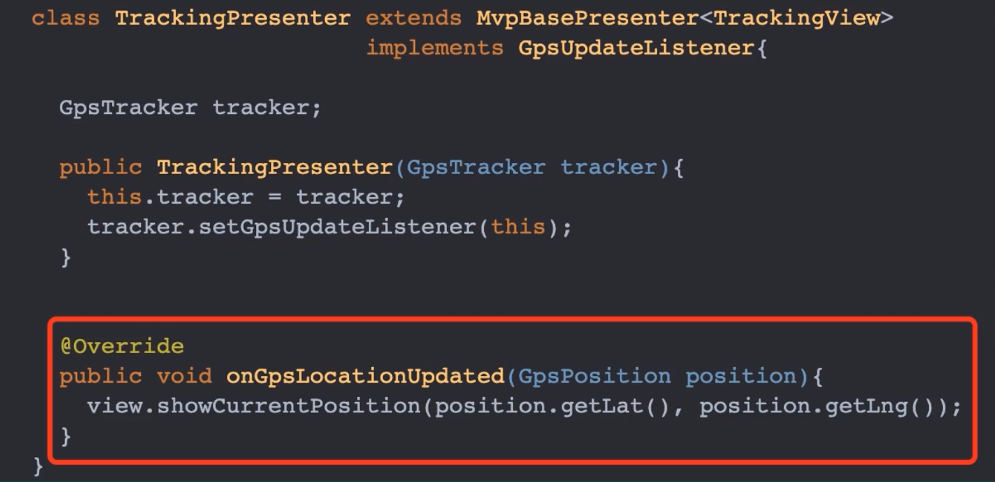
Android---MVP 中 presenter 声明周期的管理
我们经常在 Android MVP 架构中的 Presenter 层做一些耗时操作,比如请求网络数据,然后根据请求后的结果刷新 View。但是,如果按返回结束 Activity,而 Presenter 依然在执行耗时操作。那么就有可能造成内存泄漏,严重时甚…...

Oracle中的索引碎片
索引碎片是指索引在存储空间上不连续的分布情况,它可能会影响到数据库性能和查询效率。索引碎片化主要由以下几个原因导致: 插入、更新和删除操作:当对表中的数据进行插入、更新或删除操作时,索引也需要相应地更新。这些DML操作可…...
Java必刷入门递归题×5(内附详细递归解析图)
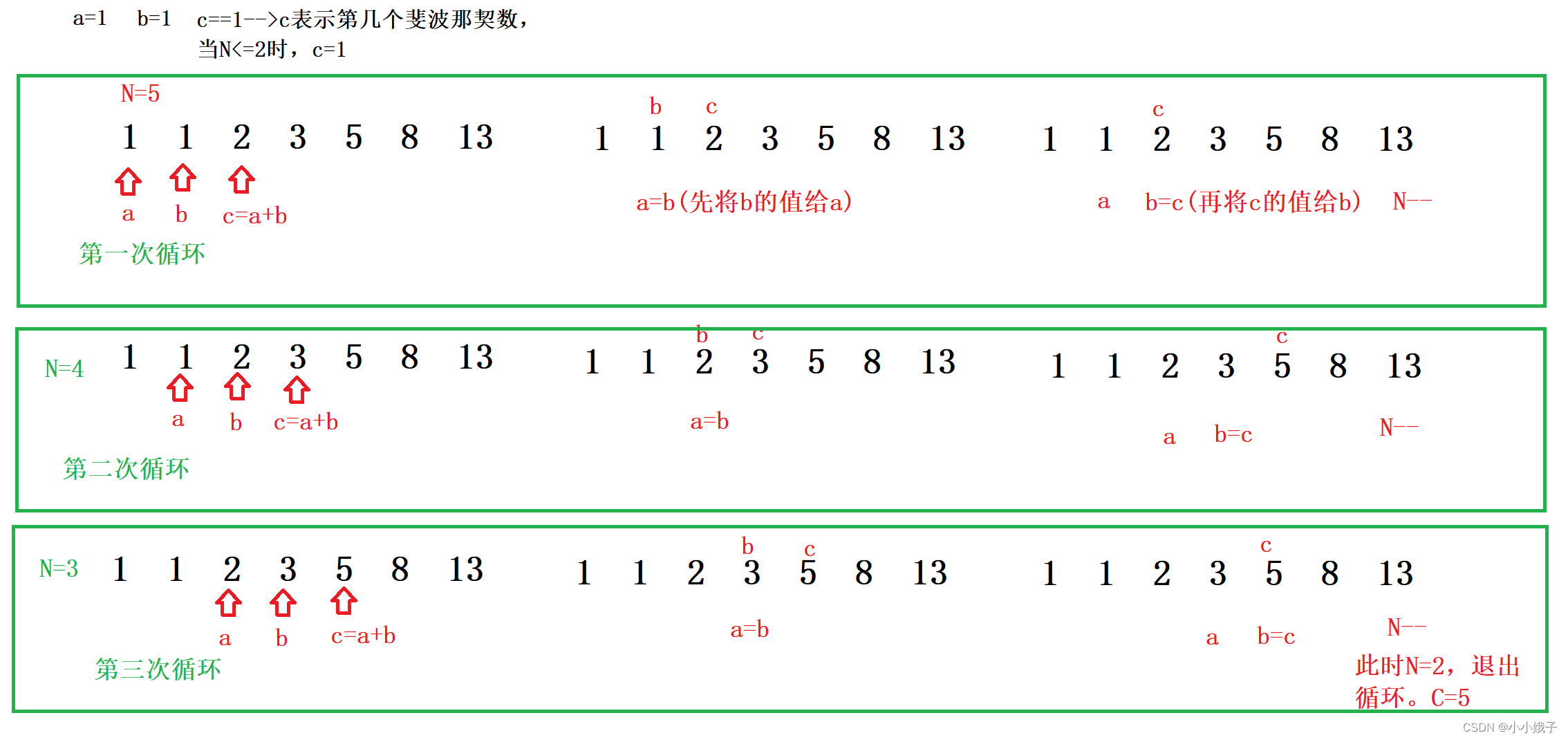
目录 1.求N的阶乘 2.求12...N的和 3.顺序打印数字的每一位 4.求数字的每一位之和 5.求斐波拉契数列 1.求N的阶乘 (1)解析题目意思 比如求5的阶乘,符号表示就是5!;所以5!5*4*3*2*1我们下面使用简单的…...

android 闪屏图适配尺寸
不同的 Android 设备可能具有不同的屏幕尺寸和分辨率,因此最好提供不同尺寸的启动画面图像,以确保与各种设备的兼容性。 以下是 Android 启动画面图像的一些最常见尺寸: 320 x 480像素(肖像) 480 x 320像素࿰…...
与(?m)的区别)
正则表达式中(?s)与(?m)的区别
理论: (?m) 和 (?s) 是正则表达式中的两个模式标志,它们具有不同的作用: (?m) 多行模式标志(也称为 “multiline” 模式): 默认情况下,正则表达式将整个输入字符串视为单行多行文本中使用…...

Clickhouse学习笔记(11)—— 数据一致性
使用合并树引擎时,无论是ReplacingMergeTree还是SummingMergeTree,都只能保证数据的最终一致性,因为数据的去重、聚合等操作会在数据合并的期间进行,而合并会在后台以一个不确定的时间进行,因此无法预先计划࿱…...
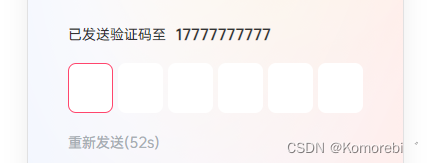
【uniapp】六格验证码输入框实现
效果图 代码实现 <view><view class"tips">已发送验证码至<text class"tips-phone">{{ phoneNumber }}</text></view><view class"code-input-wrap"><input class"code-input" v-model"…...

【react hook】在react hook组件中,使用Antd Table组件,columns数据异步获取,list数据更新但没有rerender解决办法
情景描述 我们有一个react组件,显示了一个Antd Table组件,设置了一个columns变量并复制给Table的columns属性,由于我们请求的datasource来源是异步的,示例伪代码如下: const [columns, setColumns] useState([]); /…...

ChatGPT的图识别来了
前几天ChatGPT推出了Dall-E 3功能,可以根据文字和描述一段话来生成一个或者一组图。 这次又来重磅了,图识别又来了!换句话说,也即是文生图,图生文都可以实现了,一起来试试 1、解释图中的意思 ࿰…...

java Stream编程笔记
文章目录 Stream介绍什么是 Stream? Stream中间操作过滤操作(filter)映射操作(map)排序操作(sorted)截断操作(limit 和 skip) Stream 的终止操作forEach 和 peek聚合操作…...

顶顶通语音识别使用说明
介绍 顶顶通语音识别软件(asrproxy)是一个对接了多种语音识别接口的语音识别系统。可私有化部署(支持中文英文和方言等,支持一句话识别、实时流识别、多声道录音文件识别。 原理 asrproxy内嵌了阿里达摩院的开源语音识别工具包FunASR,后续我们也会使用自有的预料…...
重磅发布 OpenAI 推出用户自定义版 ChatGPT
文章目录 重磅发布 OpenAI 推出用户自定义版 ChatGPT个人简介 重磅发布 OpenAI 推出用户自定义版 ChatGPT OpenAI 首届开发者大会 (OpenAI DevDay) 于北京时间 11 月 7 日凌晨 02:00 开始,大会上宣布了一系列平台更新。其中一个重要更新是用户可以创建他们自己的自定…...
读取 json 文件)
Java 幼儿园(20231111)读取 json 文件
1、功能场景 (1)多人合作开发一个功能模块时,需要调用外部接口 (2)对方接口的开发工作还没有完成,只能提供一个返回值的示例文件 json 文件。 (3)返回的 json 数据多达几百个字段。 …...

云计算、大数据技术的智慧工地,实现对建筑工地实时监测、管理和控制的一种新型建筑管理方式
智慧工地是利用物联网、云计算、大数据等技术,实现对建筑工地实时监测、管理和控制的一种新型建筑管理方式。 智慧工地架构: 1、终端层: 充分利用物联网技术、移动应用、智能硬件设备提高现场管控能力。通过RFID、传感器、摄像头、手机等终…...
功能案例 -- 通过开关,改变白天和黑夜
效果展示 代码展示 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><style>:root {--default-bac-color: #f…...

Linux编写一个极简版本的Shell
Linux编写一个极简版本的Shell 📟作者主页:慢热的陕西人 🌴专栏链接:Linux 📣欢迎各位大佬👍点赞🔥关注🚓收藏,🍉留言 本博客主要内容在Linux环境下ÿ…...

亚马逊云AI应用科技创新下的Amazon SageMaker使用教程
目录 Amazon SageMaker简介 Amazon SageMaker在控制台的使用 模型的各项参数 pytorch训练绘图部分代码 Amazon SageMaker简介 亚马逊SageMaker是一种完全托管的机器学习服务。借助 SageMaker,数据科学家和开发人员可以快速、轻松地构建和训练机器学习模型&#…...

深度解密douyin-downloader:高性能抖音无水印下载器的技术实现与实战进阶
深度解密douyin-downloader:高性能抖音无水印下载器的技术实现与实战进阶 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and brow…...

LangChain教程-、Langchain基础严
简介 AI Agent 不仅仅是一个能聊天的机器人(如普通的 ChatGPT),而是一个能够感知环境、进行推理、自主决策并调用工具来完成特定任务的智能系统,更够完成更为复杂的AI场景需求。 AI Agent 功能 根据查阅的资料,agent的…...

Python 快速上手 Telegram Bot:从零到一的实战指南
1. 为什么选择Python开发Telegram Bot? Telegram Bot就像是你安插在Telegram里的一个24小时待命的智能助手。它能自动回复消息、处理订单、推送新闻,甚至陪你玩文字游戏。而Python凭借其简洁的语法和丰富的库生态,成为了开发Telegram Bot的首…...

包管理工具简介:npm, pip, Maven
包管理工具是现代软件开发中不可或缺的助手,它们帮助开发者高效管理项目依赖,提升开发效率。在众多包管理工具中,npm、pip和Maven分别代表了JavaScript、Python和Java生态中的主流选择。它们不仅简化了依赖管理,还提供了丰富的功能…...

AI编程新选择:OpenCode集成Qwen3-4B模型,终端原生体验快速上手
AI编程新选择:OpenCode集成Qwen3-4B模型,终端原生体验快速上手 1. 引言:为什么选择OpenCode? 在AI编程助手领域,开发者常常面临三个核心痛点:模型切换不灵活、隐私安全顾虑、以及终端体验割裂。OpenCode的…...

Graphormer开源大模型部署案例:从RDKit处理SMILES到Gradio交互预测的完整链路
Graphormer开源大模型部署案例:从RDKit处理SMILES到Gradio交互预测的完整链路 1. 项目概述 Graphormer是一种基于纯Transformer架构的图神经网络,专门为分子图(原子-键结构)的全局结构建模与属性预测而设计。该模型在OGB、PCQM4…...

技术单例中的全局访问与状态管理
技术单例中的全局访问与状态管理 在现代软件开发中,单例模式因其独特的全局访问特性与状态管理能力,成为设计模式中的经典选择。无论是管理应用配置、用户会话,还是控制共享资源,单例模式通过确保一个类仅有一个实例,…...

Rust async trait 的底层调度逻辑解析
Rust async trait 的底层调度逻辑解析 Rust 的异步编程模型以其高效和灵活著称,而 async trait 作为异步编程的核心抽象之一,其底层调度逻辑直接影响性能与资源利用率。理解其工作机制不仅能帮助开发者写出更高效的代码,还能避免常见的并发陷…...
命令行安装全攻略)
利用国内镜像源加速PyTorch2.0(GPU版)命令行安装全攻略
1. 为什么需要国内镜像源安装PyTorch2.0 GPU版 如果你尝试过直接从PyTorch官网安装GPU版本,大概率会遇到下载速度慢如蜗牛的情况。我去年帮实验室配置深度学习环境时,一个简单的torch包下载了整整3小时还没完成,最后发现是因为默认源服务器在…...

Java 字符串常量池机制
Java字符串常量池:高效内存管理的秘密武器 在Java开发中,字符串是最常用的数据类型之一,但其频繁创建可能带来内存开销问题。为此,Java设计了字符串常量池(String Pool)机制,通过共享不可变字符…...