Pytorch CUDA CPP简易教程,在Windows上操作
文章目录
- 前言
- 一、使用的工具
- 二、学习资源分享
- 三、libtorch环境配置
- 1.配置CUDA、nvcc、cudnn
- 2.下载libtorch
- 3.CLion配置libtorch
- 4.CMake Application指定Environment variables
- 5.测试libtorch
- 四、PyTorch CUDA CPP项目流程
- 1.使用`CLion`结合`torch extension`编写可以调用cuda的C++代码
- 2.编写`CU`设备代码,在代码中调用CUDA核函数使用GPU运算
- 3.创建header定义设备函数
- 4.编写`CPP`主机代码,在代码中使用`PYBIND`库连接pytorch和c++代码,使用主机函数调用设备函数
- 5.在`Pycharm`中创建`setup.py`脚本,将C++编写的cuda代码编译为python的一个package
- 6.使用`pip`安装自定义的cuda代码库
- 7.安装好自定义的cuda自定义库之后,编写python代码调用
- 五、总结
前言
这学期确定了研究方法,具体为三维重建相关,转而研究三维重建相关的知识。最近3D Gaussian Splatting方法效果十分的好,并且开源了源代码,因此十分值得对其源码进行研究,源码中对于可微光栅化的实现是基于CUDA实现的,因此想要后续对这块内容进行改进,则必须了解CUDA程序是如何编写的,作为一名DL农工,学习CUDA编程也有助于自己对于整个DL流程的理解,也能够进一步拓展自己的编程技术,因此无论出于什么目的,作为DL农工,我认为有必要掌握这项技术。
本教程仅作为Pytorch CUDA CPP开发的简易教程,我也是初学者。同时本教程的目的也是为了方便不熟悉CUDA项目结构的人快速了解一份新的程序的文件结构是怎样的。
一、使用的工具
Pytorch, libtorch, CUDA, C++, CLion, Pycharm
二、学习资源分享
如果想要详细了解整个CUDA程序的工作原理,可以观看这个详细教程:CUDA编程基础入门系列
如果想功利点的学习如何使用Pytorch调用CUDA程序,可以观看这个教程:Pytorch+cpp/cuda extension 教学
本简易教程也是基于第二个视频教程写的,这个教程讲了一种通用的Pytorch、CUDA程序编写范式,使用pytorch+cpp+cuda开发的几乎都遵循这套代码编写流程,因此学会怎么写,基本上就能看明白其他人的CUDA程序文件是如何组织的,尽管你还是有可能看不懂CUDA代码,但是你学完后一定能看明白CUDA程序是如何组织的。
自定义 C++ 和 CUDA 扩展
PYTORCH C++ API
三、libtorch环境配置
注意:我所有的操作都是在Windows上进行的,Linux上的操作应该也大差不差
libtorch环境配置的教程有很多,你可以参考其他人的博客进行配置,这里我仅贴我使用CLion配置libtorch的流程
1.配置CUDA、nvcc、cudnn
该项不进行说明,有许多攻略可供参考,这里贴一篇博客 Windows安装CUDA及cuDNN【保姆级教程】
注意安装的CUDA版本不要太新了,且要与libtorch提供的CUDA版本保持一致,目前官网提供的libtorch CUDA版本为11.8,因此你安装的CUDA最好也是11.8,否则会有许多奇怪的错误
你都来看CUDA编程了,不至于DL环境还不会配置吧🤣
2.下载libtorch
前往pytorch官网下载libtorch:Pytorch
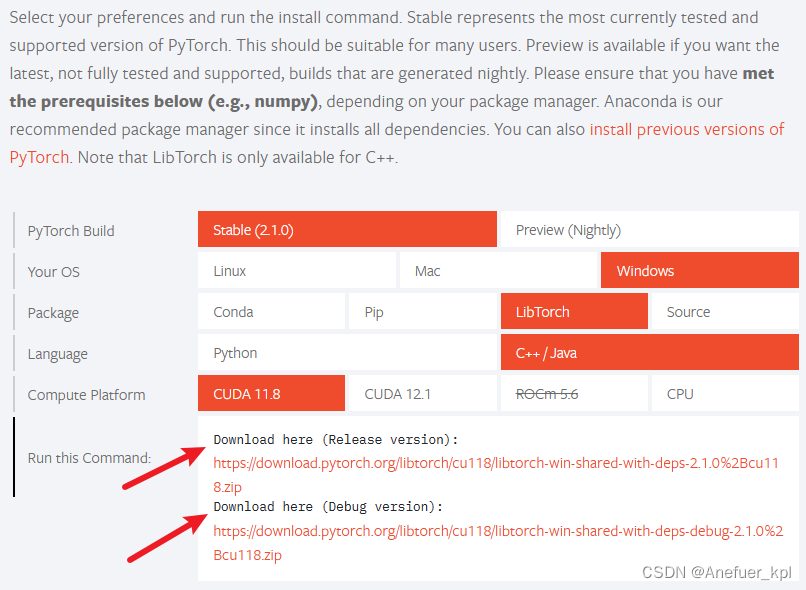
你可以选择CPU和CUDA版本,这就和Pytorch的CPU和CUDA版是一个意思,个人感觉对于Pytorch CUDA开发,CPU和CUDA版没有什么区别,libtorch就相当于一个C++版本的Pytorch,但是我们的目的仅仅是用C++版的torch调用CUDA程序,最后还是要用python代码调用C++代码,最后由C++调用CUDA程序。为了避免出现奇怪的bug,还是一开始就下载CUDA版的吧。
有release和debug两个版本可以选择,debug版支持debug操作,相应容量会大些;release版不能debug,容量会小很多。你自己选择,一般选debug版。
3.CLion配置libtorch
创建CLion项目,一定要创建 C++ Executable 项目,不要创建CUDA Executable,否则CMAKE时会不通过,出现奇怪的BUG我也不知道为啥。
在CMakeLists.txt中填入一下内容
有#标识的表示需要修改成你自己的libtorch里对应的路径
cmake_minimum_required(VERSION 3.25)
project(xxx) # xxx为你自己的项目名称,这部分为CLion自动生成的set(CMAKE_CXX_STANDARD 17)
set(Torch_DIR E:/CLion/libtorch/share/cmake/Torch) # your own path
find_package(Torch REQUIRED)include_directories(E:/CLion/libtorch/include) # your own path
include_directories(E:/CLion/libtorch/include/torch/csrc/api/include) # your own pathadd_executable(xxx main.cpp)
target_link_libraries(xxx ${TORCH_LIBRARIES})
set_property(TARGET xxx PROPERTY CXX_STANDARD 17)
4.CMake Application指定Environment variables
经过实测,如果不指定这个选项,会出现CMake时找不到xxx.dll,这些dll文件其实是存在的,但就是找不到位置,因此需要手动去指定,参考我的这篇博客:CLion配置libtorch找不到xxx.dll
5.测试libtorch
在main.cpp粘贴如下代码:
#include <iostream>
#include <torch/torch.h>int main() {torch::Tensor tensor = torch::rand({2, 3});std::cout << tensor << std::endl;std::cout << torch::cuda::is_available() << std::endl;std::cout << "Hello, World!" << std::endl;return 0;
}
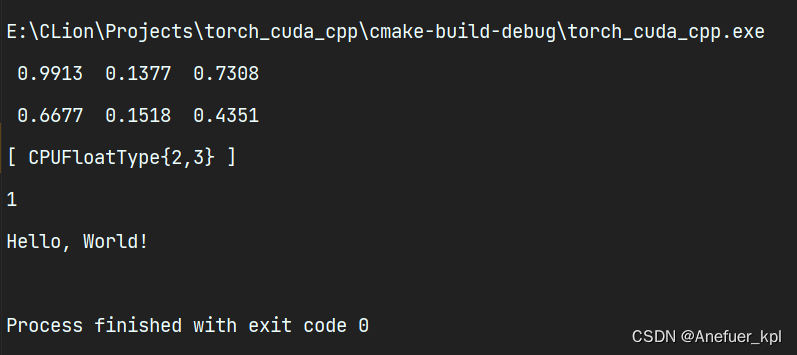
出现上面的输出,libtorch配置成功
如果在CMAKE时出现Unicode相关字样的报错,请参考我的这篇博客:warning C4819: 该文件包含不能在当前代码页(936)中表示的字符。请将该文件保存为 Unicode 格式以防止数据丢失
四、PyTorch CUDA CPP项目流程
可以把C++理解为沟通Pytorch代码和CUDA代码的桥梁
1.使用CLion结合torch extension编写可以调用cuda的C++代码
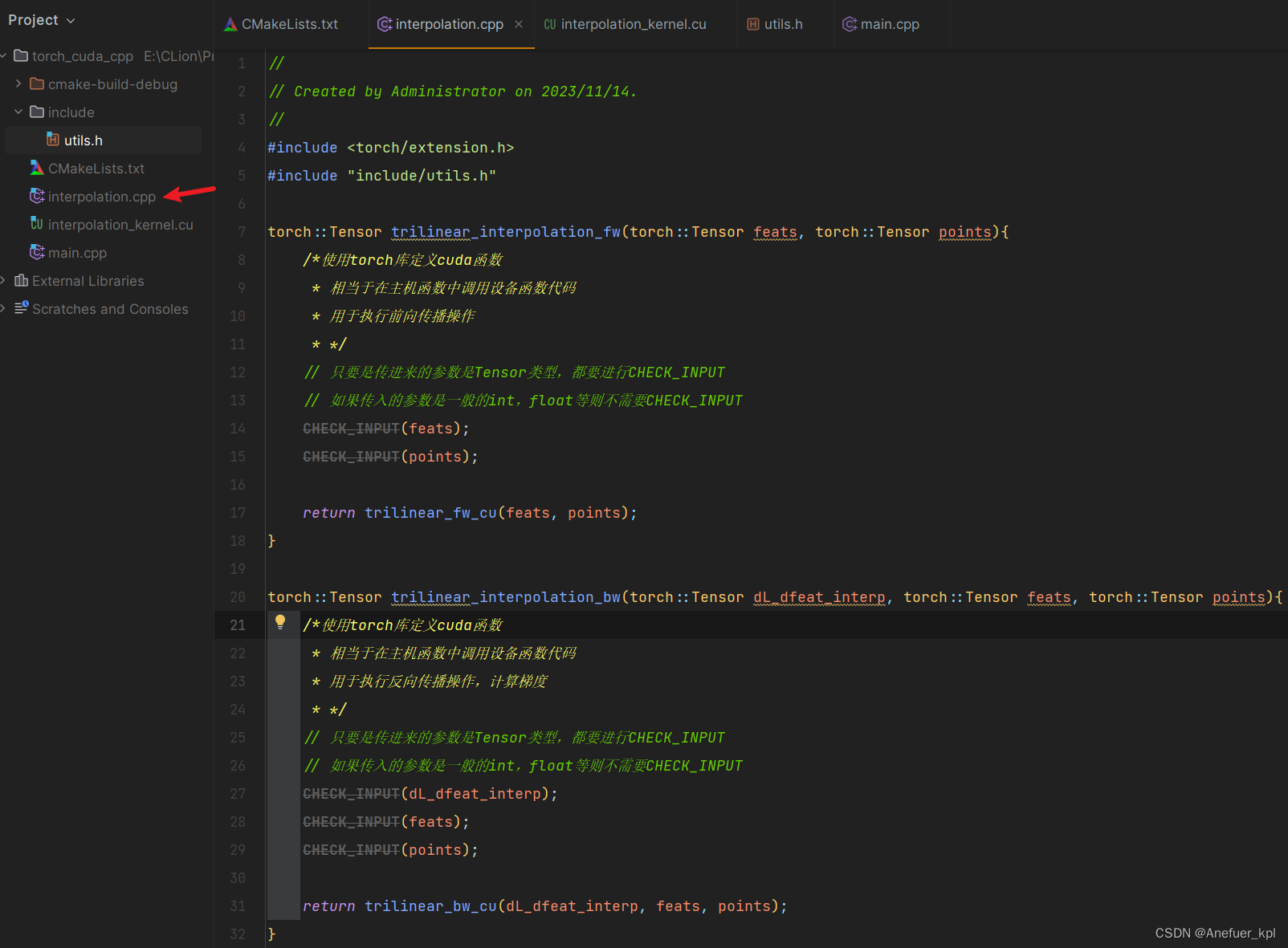
创建interpolation.cpp,你可以理解为该文件内存放着主机函数(即在CPU上执行的函数),用于调用设备函数(即在GPU上执行的函数)。
#include <torch/extension.h>
#include "include/utils.h" // 自定义的headertorch::Tensor trilinear_interpolation_fw(torch::Tensor feats, torch::Tensor points){/*使用torch库定义cuda函数* 相当于在主机函数中调用设备函数代码* 用于执行前向传播操作* */// 只要是传进来的参数是Tensor类型,都要进行CHECK_INPUT// 如果传入的参数是一般的int,float等则不需要CHECK_INPUTCHECK_INPUT(feats);CHECK_INPUT(points);// trilinear_fw_cu() 为设备函数,// 可以理解为主机函数作为设备函数的入口,这只是一种写法,你也可以有别的写法return trilinear_fw_cu(feats, points);
}torch::Tensor trilinear_interpolation_bw(torch::Tensor dL_dfeat_interp, torch::Tensor feats, torch::Tensor points){/*使用torch库定义cuda函数* 相当于在主机函数中调用设备函数代码* 用于执行反向传播操作,计算梯度* */// 只要是传进来的参数是Tensor类型,都要进行CHECK_INPUT// 如果传入的参数是一般的int,float等则不需要CHECK_INPUTCHECK_INPUT(dL_dfeat_interp);CHECK_INPUT(feats);CHECK_INPUT(points);return trilinear_bw_cu(dL_dfeat_interp, feats, points);
}PYBIND11_MODULE(TORCH_EXTENSION_NAME, m) {/*pybind库用于作为连接python和C++的桥梁* name_: 表示python调用c++函数的名称(名称可一致也可以不一致),f:表示c++函数的地址*/m.def("trilinear_interpolation_fw", &trilinear_interpolation_fw);m.def("trilinear_interpolation_bw", &trilinear_interpolation_bw);
}
2.编写CU设备代码,在代码中调用CUDA核函数使用GPU运算
注意:设备函数卸载 .cu 文件中,只有这样在编译时nvcc才能识别
创建interpolation_kernel.cu编写设备函数
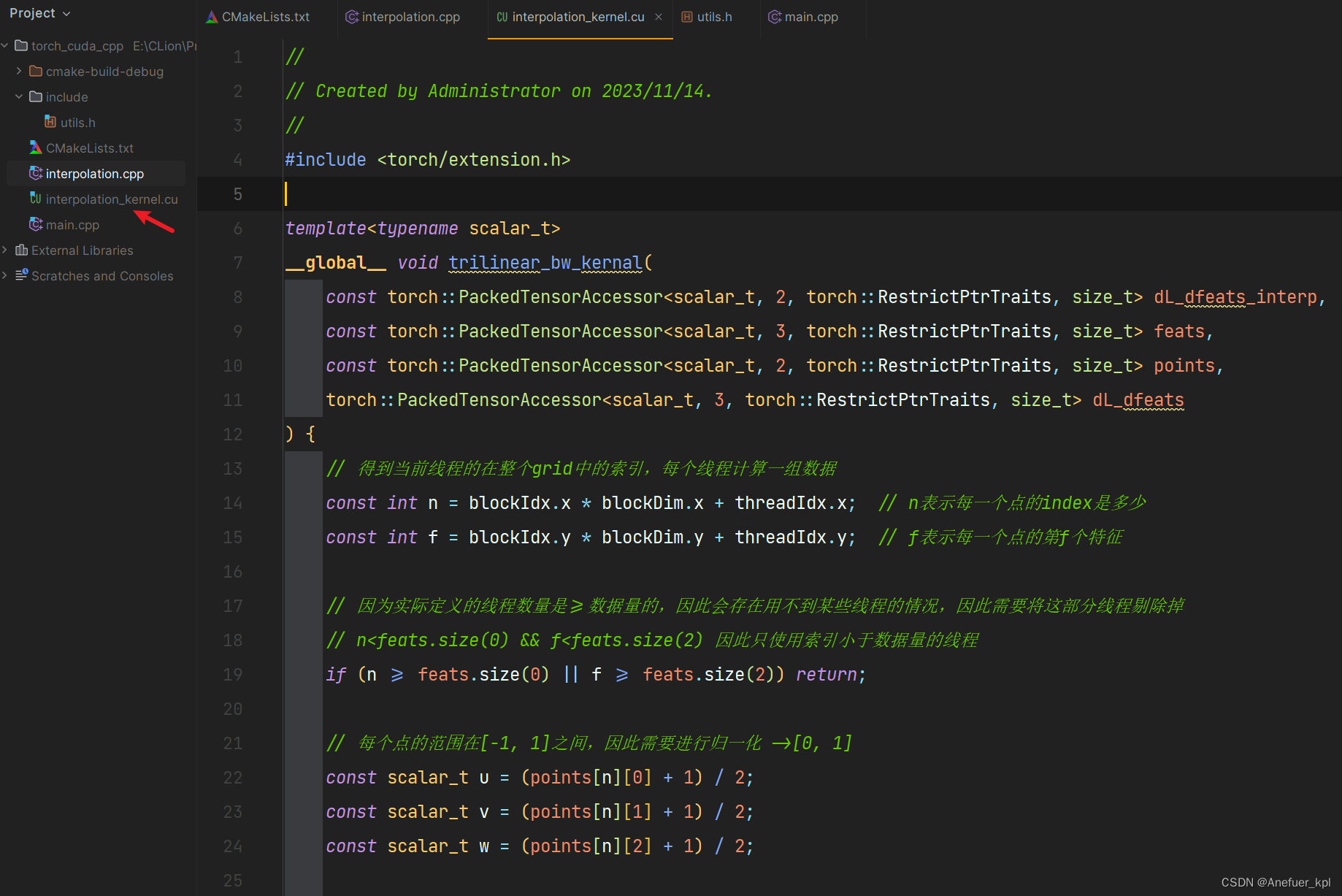
#include <torch/extension.h>template<typename scalar_t>
__global__ void trilinear_bw_kernal(const torch::PackedTensorAccessor<scalar_t, 2, torch::RestrictPtrTraits, size_t> dL_dfeats_interp,const torch::PackedTensorAccessor<scalar_t, 3, torch::RestrictPtrTraits, size_t> feats,const torch::PackedTensorAccessor<scalar_t, 2, torch::RestrictPtrTraits, size_t> points,torch::PackedTensorAccessor<scalar_t, 3, torch::RestrictPtrTraits, size_t> dL_dfeats
) {// 得到当前线程的在整个grid中的索引,每个线程计算一组数据const int n = blockIdx.x * blockDim.x + threadIdx.x; // n表示每一个点的index是多少const int f = blockIdx.y * blockDim.y + threadIdx.y; // f表示每一个点的第f个特征// 因为实际定义的线程数量是>=数据量的,因此会存在用不到某些线程的情况,因此需要将这部分线程剔除掉// n<feats.size(0) && f<feats.size(2) 因此只使用索引小于数据量的线程if (n >= feats.size(0) || f >= feats.size(2)) return;// 每个点的范围在[-1, 1]之间,因此需要进行归一化 ->[0, 1]const scalar_t u = (points[n][0] + 1) / 2;const scalar_t v = (points[n][1] + 1) / 2;const scalar_t w = (points[n][2] + 1) / 2;// 计算内插权重// 三线性插值可以分解为两组双线性插值加一组单线性插值// a b c d表示计算双线性插值时的4个顶点对应的插值权重const scalar_t a = (1 - v) * (1 - w);const scalar_t b = (1 - v) * w;const scalar_t c = v * (1 - w);const scalar_t d = 1 - a - b - c;// 计算偏导数,我们需要实现根据公式计算出8个特征点的偏微分dL_dfeats[n][0][f] = (1-u)*a*dL_dfeats_interp[n][f];dL_dfeats[n][1][f] = (1-u)*b*dL_dfeats_interp[n][f];dL_dfeats[n][2][f] = (1-u)*c*dL_dfeats_interp[n][f];dL_dfeats[n][3][f] = (1-u)*d*dL_dfeats_interp[n][f];dL_dfeats[n][4][f] = u*a*dL_dfeats_interp[n][f];dL_dfeats[n][5][f] = u*b*dL_dfeats_interp[n][f];dL_dfeats[n][6][f] = u*c*dL_dfeats_interp[n][f];dL_dfeats[n][7][f] = u*d*dL_dfeats_interp[n][f];
}// template <typename scalar_t> 表示告诉函数,函数输入参数的类型会根据scalar_t进行可变的对应
// 下面的参数的输入方法也是固定的,之后可以复制后并简单修改后使用
template<typename scalar_t>
__global__ void trilinear_fw_kernal(const torch::PackedTensorAccessor<scalar_t, 3, torch::RestrictPtrTraits, size_t> feats,const torch::PackedTensorAccessor<scalar_t, 2, torch::RestrictPtrTraits, size_t> points,torch::PackedTensorAccessor<scalar_t, 2, torch::RestrictPtrTraits, size_t> feat_interp
) {// 得到当前线程的在整个grid中的索引,每个线程计算一组数据const int n = blockIdx.x * blockDim.x + threadIdx.x; // n表示每一个点的index是多少const int f = blockIdx.y * blockDim.y + threadIdx.y; // f表示每一个点的第f个特征// 因为实际定义的线程数量是>=数据量的,因此会存在用不到某些线程的情况,因此需要将这部分线程剔除掉// n<feats.size(0) && f<feats.size(2) 因此只使用索引小于数据量的线程if (n >= feats.size(0) || f >= feats.size(2)) return;// 每个点的范围在[-1, 1]之间,因此需要进行归一化 ->[0, 1]const scalar_t u = (points[n][0] + 1) / 2;const scalar_t v = (points[n][1] + 1) / 2;const scalar_t w = (points[n][2] + 1) / 2;// 计算内插权重// 三线性插值可以分解为两组双线性插值加一组单线性插值// a b c d表示计算双线性插值时的4个顶点对应的插值权重const scalar_t a = (1 - v) * (1 - w);const scalar_t b = (1 - v) * w;const scalar_t c = v * (1 - w);const scalar_t d = 1 - a - b - c;feat_interp[n][f] = (1 - u) * (a * feats[n][0][f] +b * feats[n][1][f] +c * feats[n][2][f] +d * feats[n][3][f]) +u * (a * feats[n][4][f] +b * feats[n][5][f] +c * feats[n][6][f] +d * feats[n][7][f]);
}/*如果想要在C++中回传多个值,那么可以直接回传一个vector类型,* std::vector<torch::Tensor> trilinear_fw_cu(){* return {a, b, c, ...}* }* */
torch::Tensor trilinear_fw_cu(torch::Tensor feats, torch::Tensor points) {/*使用torch库定义cuda函数* fw:表示前向传播 bw:表示反向传播 cu:表示这是一个cuda程序* feats: [N, 8, F],表示N个元素,每个元素有8个顶点以及对应的特征* points: [N, 3],表示N个元素,每个元素有3个顶点坐标* */const int N = feats.size(0), F = feats.size(2);// 生成output变量,并指定变量的数据类型,并指定数据存放在哪个设备上// 将运算结果存储在output变量中torch::Tensor feat_interp = torch::zeros({N, F}, torch::dtype(torch::kFloat32).device(feats.device()));// 定义grid和block大小
// 根据要同时运算的数据维度的大小,建立相应大小的threadconst dim3 threads(16, 16); // 定义一个block的大小,一个block内有多少个线程,一般一个block定义为256个线程不会出错const dim3blocks((N + threads.x - 1) / threads.x, (N + threads.y - 1) / threads.y); // 定义一个grid的大小,一个grid内有多少个block
/*假设输入的大小为N=20,F=10;而一个block的大小为16*16,* 因此需要额外的一个block才能包含整个输入数据,因此一个grid的大小应该为2*1* 线程的数量应该>=数据量 */// 启动一个kernel
// 下面的书写方法是固定的,以后复制粘贴使用即可
/* AT_DISPATCH_FLOATING_TYPES: 表示启动的这个kernel用于浮点数运算,包括float32和float64的运算* AT_DISPATCH_FLOATING_TYPES_HALF: 表示可以进行16,32,64位的浮点数运算* AT_DISPATCH_INTEGRAL_TYPES: 表示进行32和64位整数运算* feats.type(): 表示feats的数据类型* "trilinear_fw_cu": 表示启动的kernel的名字,建议kernel的名称与函数的名称一致,方便找错误* trilinear_fw_cu<scalar_t><<<blocks, threads>>>: 丢出一个kernel,指定kernel的名称,用于在设备函数上进行相应的运算* <scalar_t>: 表示相当于一个placeholder,因为不知道参数具体是什么类型,因此先占个位置;如果知道是什么类型,直接写上对应的类型即可,比如float* <<<blocks, threads>>>: 表示启动的kernel的线程数,以及线程的block数* feats.packed_accessor<scalar_t, 3, torch::RestrictPtrTraits, size_t>()* feats.packed_accessor,points.packed_accessor,feat_interp.packed_accessor 表示这个kernel函数传入的三个值* packed_accessor表示这个值是一个指针,指向一个内存地址,这个地址存储着数据,并且这个地址可以被grid和block访问,并且这个地址可以被cuda的线程访问* 只有Tensor参数才需要进行packed_accessor处理,如果是一般的参数则直接写入参数列表即可* 比如:trilinear_fw_cu<scalar_t><<<blocks, threads>>>(a, feats.packed_accessor<scalar_t, 3, torch::RestrictPtrTraits, size_t>(), ...)* scalar_t: 表示参数类型* 3: 表示参数维度,这里表示传入的参数维度为3* torch::RestrictPtrTraits: 表示这个参数是restrict指针,表示这个参数不能被修改 (torch::RestrictPtrTraits和size_t这两个参数一般不用改)* size_t: 表示这个参数这种类型占用的内存大小,用于访问内存* */AT_DISPATCH_FLOATING_TYPES(feats.type(), "trilinear_fw_cu",([&] {trilinear_fw_kernal<scalar_t><<<blocks, threads>>>(feats.packed_accessor<scalar_t, 3, torch::RestrictPtrTraits, size_t>(),points.packed_accessor<scalar_t, 2, torch::RestrictPtrTraits, size_t>(),feat_interp.packed_accessor<scalar_t, 2, torch::RestrictPtrTraits, size_t>());}));return feat_interp;
}/*反向传播,利用梯度更细参数的值 */
torch::Tensor trilinear_bw_cu(torch::Tensor dL_dfeat_interp,torch::Tensor feats,torch::Tensor points) {/* 用于反向传播计算特征的梯度* dL_dfeat_interp: 表示根据损失值计算出来的特征关于损失的梯度* */const int N = feats.size(0), F = feats.size(2);torch::Tensor dL_dfeats = torch::zeros({N, 8, F}, feats.options()); // 微分后的值的size和原来是一样大的,保存每个特征的偏微分值const dim3 threads(16, 16);const dim3 blocks((N + threads.x - 1) / threads.x, (F + threads.y - 1) / threads.y);AT_DISPATCH_FLOATING_TYPES(feats.type(), "trilinear_bw_cu",([&] {trilinear_bw_kernal<scalar_t><<<blocks, threads>>>(dL_dfeat_interp.packed_accessor<scalar_t, 2, torch::RestrictPtrTraits, size_t>(),feats.packed_accessor<scalar_t, 3, torch::RestrictPtrTraits, size_t>(),points.packed_accessor<scalar_t, 2, torch::RestrictPtrTraits, size_t>(),dL_dfeats.packed_accessor<scalar_t, 3, torch::RestrictPtrTraits, size_t>());}));return dL_dfeats;
}
3.创建header定义设备函数
创建include/utils.h头文件,定义函数
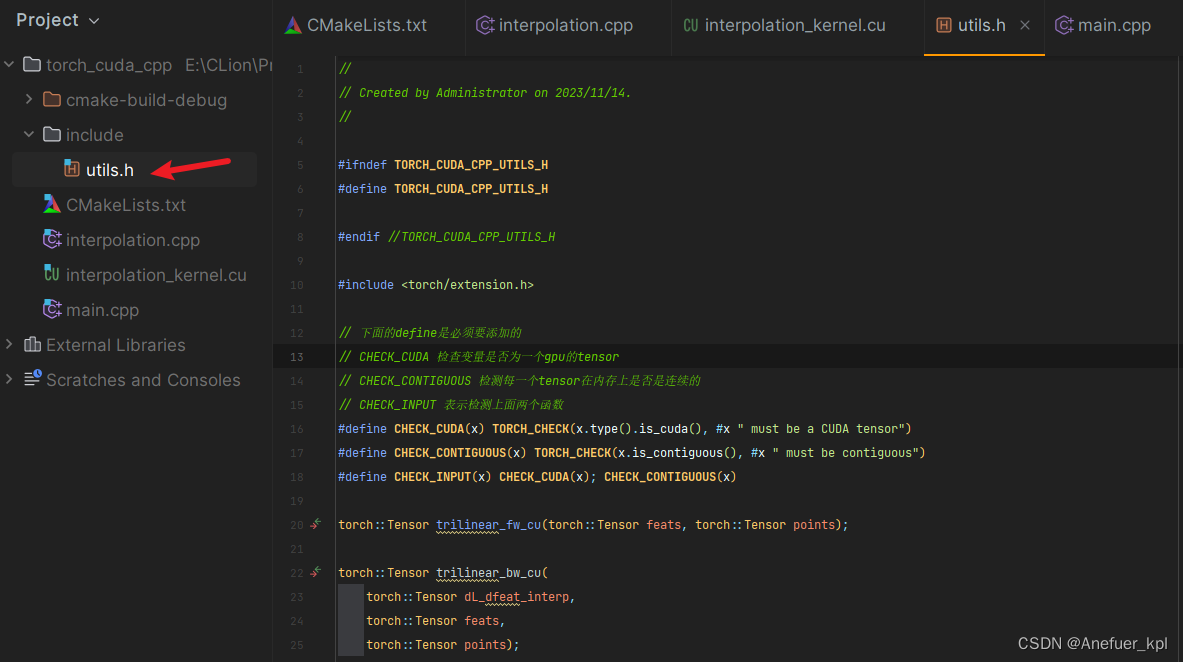
#ifndef TORCH_CUDA_CPP_UTILS_H
#define TORCH_CUDA_CPP_UTILS_H#endif //TORCH_CUDA_CPP_UTILS_H#include <torch/extension.h>// 下面的define是必须要添加的,作用类似于python的assert
// CHECK_CUDA 检查变量是否为一个gpu的tensor
// CHECK_CONTIGUOUS 检测每一个tensor在内存上是否是连续的
// CHECK_INPUT 表示检测上面两个函数
#define CHECK_CUDA(x) TORCH_CHECK(x.type().is_cuda(), #x " must be a CUDA tensor")
#define CHECK_CONTIGUOUS(x) TORCH_CHECK(x.is_contiguous(), #x " must be contiguous")
#define CHECK_INPUT(x) CHECK_CUDA(x); CHECK_CONTIGUOUS(x)torch::Tensor trilinear_fw_cu(torch::Tensor feats, torch::Tensor points);torch::Tensor trilinear_bw_cu(torch::Tensor dL_dfeat_interp,torch::Tensor feats,torch::Tensor points);
4.编写CPP主机代码,在代码中使用PYBIND库连接pytorch和c++代码,使用主机函数调用设备函数
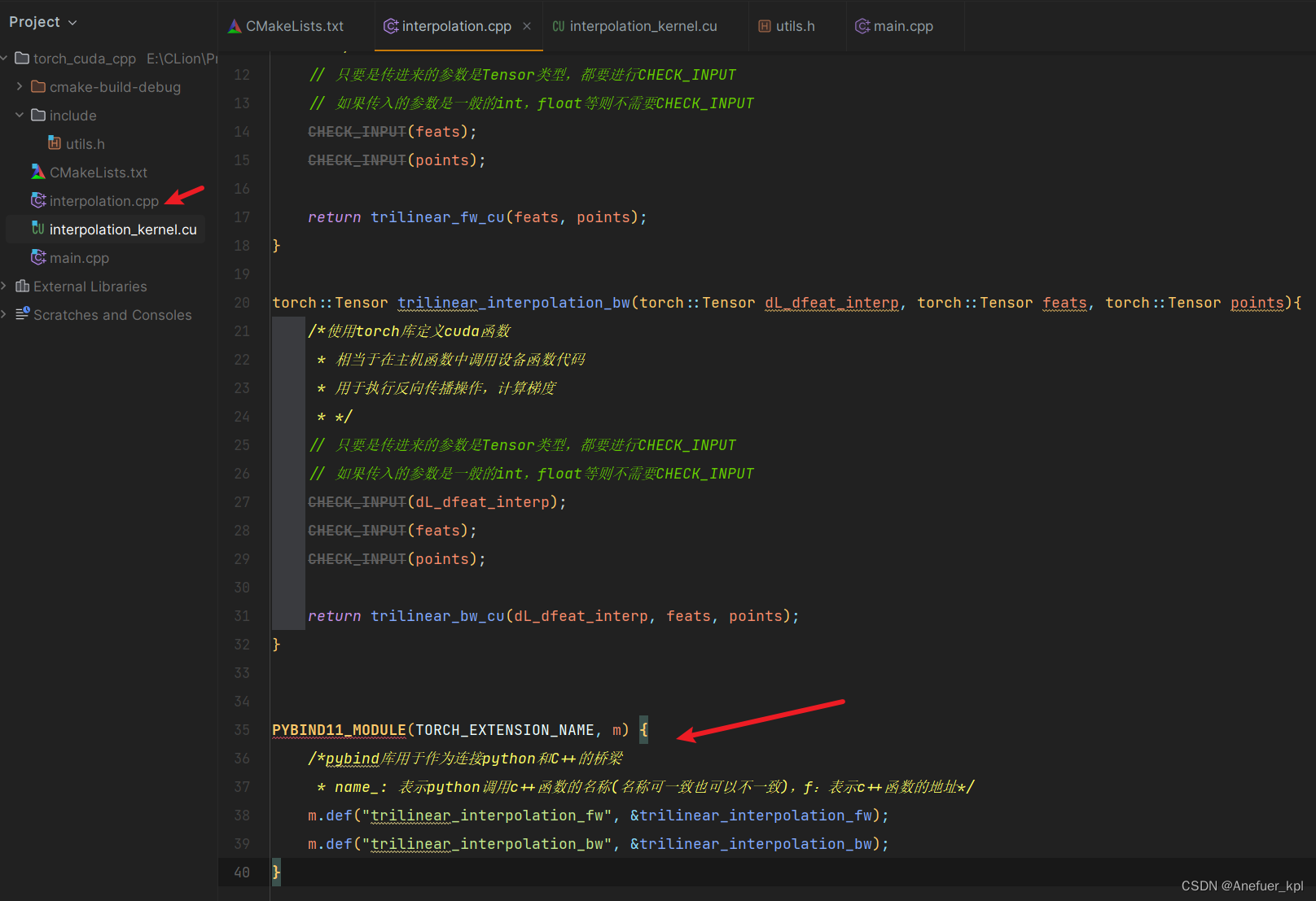
PYBIND11_MODULE(TORCH_EXTENSION_NAME, m) {/*pybind库用于作为连接python和C++的桥梁* name_: 表示python调用c++函数的名称(名称可一致也可以不一致),f:表示c++函数的地址*/m.def("trilinear_interpolation_fw", &trilinear_interpolation_fw);m.def("trilinear_interpolation_bw", &trilinear_interpolation_bw);
}
trilinear_interpolation_fw表示你在python代码中调用cuda函数时,这个cuda函数的别名,这个别名进行和CUDA函数保持一致,报错了好找位置。trilinear_interpolation_bw同理
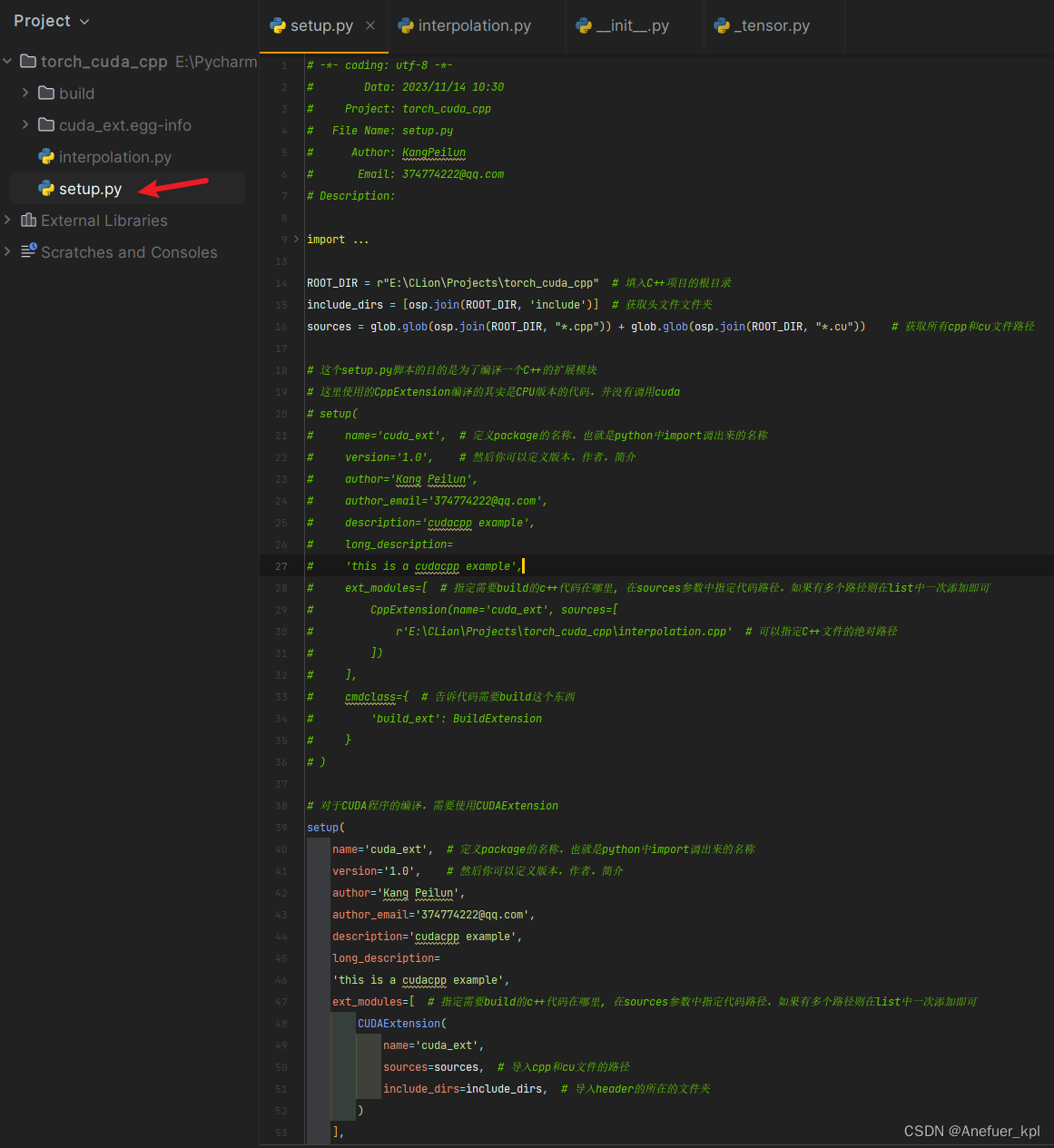
5.在Pycharm中创建setup.py脚本,将C++编写的cuda代码编译为python的一个package
一定是创建setup.py,不能是别的名称
# -*- coding: utf-8 -*-
# Data: 2023/11/14 10:30
# Project: torch_cuda_cpp
# File Name: setup.py
# Author: KangPeilun
# Email: 374774222@qq.com
# Description:import glob
import os.path as osp
from setuptools import setup
from torch.utils.cpp_extension import CppExtension, BuildExtension, CUDAExtensionROOT_DIR = r"E:\CLion\Projects\torch_cuda_cpp" # 填入C++项目的根目录
include_dirs = [osp.join(ROOT_DIR, 'include')] # 获取头文件文件夹
sources = glob.glob(osp.join(ROOT_DIR, "*.cpp")) + glob.glob(osp.join(ROOT_DIR, "*.cu")) # 获取所有cpp和cu文件路径# 这个setup.py脚本的目的是为了编译一个C++的扩展模块
# 这里使用的CppExtension编译的其实是CPU版本的代码,并没有调用cuda
# setup(
# name='cuda_ext', # 定义package的名称,也就是python中import调出来的名称
# version='1.0', # 然后你可以定义版本,作者,简介
# author='Kang Peilun',
# author_email='374774222@qq.com',
# description='cudacpp example',
# long_description=
# 'this is a cudacpp example',
# ext_modules=[ # 指定需要build的c++代码在哪里, 在sources参数中指定代码路径,如果有多个路径则在list中一次添加即可
# CppExtension(name='cuda_ext', sources=[
# r'E:\CLion\Projects\torch_cuda_cpp\interpolation.cpp' # 可以指定C++文件的绝对路径
# ])
# ],
# cmdclass={ # 告诉代码需要build这个东西
# 'build_ext': BuildExtension
# }
# )# 对于CUDA程序的编译,需要使用CUDAExtension
setup(name='cuda_ext', # 定义package的名称,也就是python中import调出来的名称version='1.0', # 然后你可以定义版本,作者,简介author='Kang Peilun',author_email='374774222@qq.com',description='cudacpp example',long_description='this is a cudacpp example',ext_modules=[ # 指定需要build的c++代码在哪里, 在sources参数中指定代码路径,如果有多个路径则在list中一次添加即可CUDAExtension(name='cuda_ext',sources=sources, # 导入cpp和cu文件的路径include_dirs=include_dirs, # 导入header的所在的文件夹)],cmdclass={ # 告诉代码需要build这个东西'build_ext': BuildExtension}
)
6.使用pip安装自定义的cuda代码库
使用setup.py编译安装自定义的CUDA库
注意一定得是setup.py所在文件夹
pip install .
# . 表示setup.py所在的文件夹
# 当setup.py在别的文件夹中时,把.替换为setup.py所在文件夹路径即可,
# 注意一定得是setup.py所在文件夹
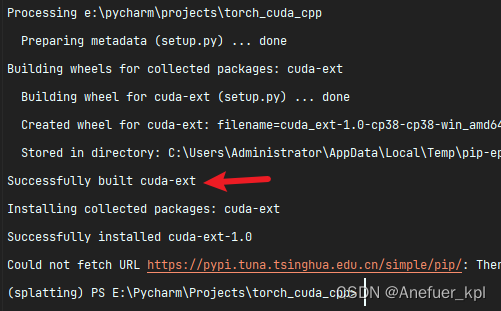
出现下方字样即代表,安装成功
7.安装好自定义的cuda自定义库之后,编写python代码调用
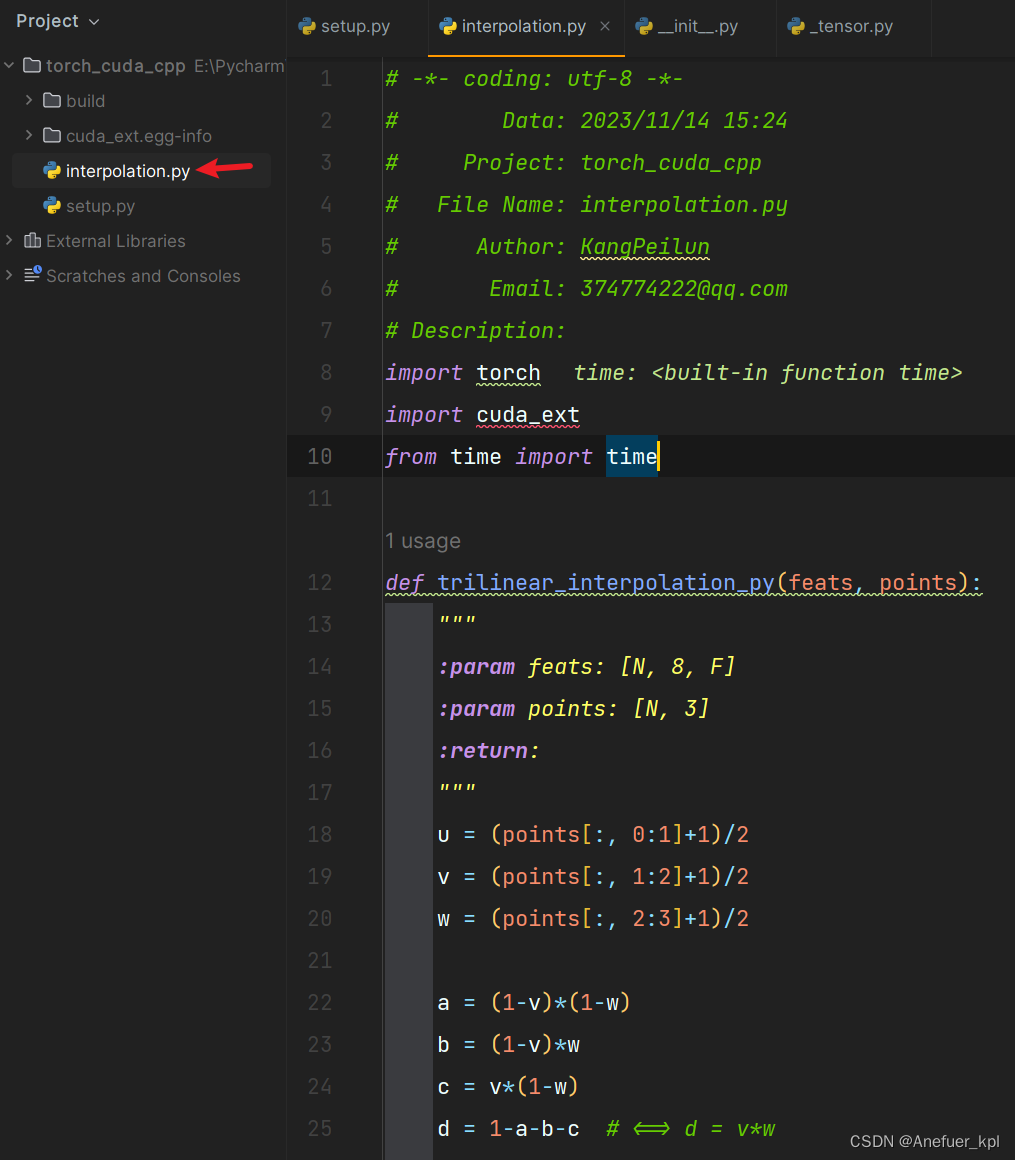
# -*- coding: utf-8 -*-
# Data: 2023/11/14 15:24
# Project: torch_cuda_cpp
# File Name: interpolation.py
# Author: KangPeilun
# Email: 374774222@qq.com
# Description:
import torch
import cuda_ext
from time import timedef trilinear_interpolation_py(feats, points):""":param feats: [N, 8, F]:param points: [N, 3]:return:"""u = (points[:, 0:1]+1)/2v = (points[:, 1:2]+1)/2w = (points[:, 2:3]+1)/2a = (1-v)*(1-w)b = (1-v)*wc = v*(1-w)d = 1-a-b-c # <=> d = v*wfeats_interp = (1-u)*(a*feats[:, 0] + b*feats[:, 1] + c*feats[:, 2] + d*feats[:, 3]) +\u*(a*feats[:, 4] + b*feats[:, 5] + c*feats[:, 6] + d*feats[:, 7])return feats_interpclass Trilinear_interpolation_cuda(torch.autograd.Function):'''使用torch.autograd.Function包装fw和bw处理实现这个类,需要手动实现forward和backward两个函数,并且要用@staticmethod修饰ctx: 负责存储反向传播用到的值,这个参数不能省略forward的返回值的个数与backward输入参数的个数一致backward的返回值个数与forward的输入参数个数一致,且返回计算过梯度的参数,如果某个参数不需要计算梯度,则对应返回None'''@staticmethoddef forward(ctx, feats, points):feat_interp = cuda_ext.trilinear_interpolation_fw(feats, points)ctx.save_for_backward(feats, points)return feat_interp@staticmethoddef backward(ctx, dL_dfeat_interp):feats, points = ctx.saved_tensorsdL_feats = cuda_ext.trilinear_interpolation_bw(dL_dfeat_interp.contiguous(), feats, points)return dL_feats, Noneif __name__ == '__main__':N = 65536F = 256# feats = torch.rand(N, 8, F, device='cuda').requires_grad_()rand = torch.rand(N, 8, F, device='cuda')feats1 = rand.clone().requires_grad_()feats2 = rand.clone().requires_grad_()points = torch.rand(N, 3, device='cuda')*2 - 1t = time()# 自定义的CUDA函数是没有办法自动计算梯度的,需要我们手动计算梯度# 通过torch.autograd.grad自动保存计算后的梯度# 使用 .apply 执行自定义的CUDA前向传播过程out_cuda = Trilinear_interpolation_cuda.apply(feats1, points)torch.cuda.synchronize()print("\tCUDA time: ", time()-t, out_cuda)# 1.使用Pytorch计算梯度t = time()out_py = trilinear_interpolation_py(feats2, points) # Pytorch可以自动计算梯度torch.cuda.synchronize()print("\tPytorch time: ", time()-t, out_py)## print(torch.allclose(out_cuda, out_py)) # 判断两个tensor在误差范围内是否接近loss2 = out_py.sum() # 简单的将他们的和作为loss,仅用于测试loss2.backward() # 反向传播计算梯度# 2.使用自定义CUDA函数计算梯度loss1 = out_cuda.sum()loss1.backward()print("bw all close", torch.allclose(feats1.grad, feats2.grad))
五、总结
第四部分介绍了整个Pytorch CUDA CPP项目一般会包含哪些文件,所有代码都是基于教程:Pytorch+cpp/cuda extension 教学 编写,推荐有时间和能力的人把这个教程学完,会受益匪浅的。
总体来说Pytorch CUDA CPP项目一般同时会包含.py、.cpp、.cu、.h文件,cpp文件存放主机函数用于调用设备函数,cu文件存放设备函数用于调用kernel核函数在GPU上进行运算,setup.py文件用于将自定义的cuda程序构建为python的一个package,其他py文件调用package实现python调用C++代码,C++代码调用CUDA程序这一流程。
相关文章:
Pytorch CUDA CPP简易教程,在Windows上操作
文章目录 前言一、使用的工具二、学习资源分享三、libtorch环境配置1.配置CUDA、nvcc、cudnn2.下载libtorch3.CLion配置libtorch4.CMake Application指定Environment variables5.测试libtorch 四、PyTorch CUDA CPP项目流程1.使用CLion结合torch extension编写可以调用cuda的C代…...

服务器怎么连接
服务器怎么连接 服务器可以通过多种方式连接,主要取决于服务器的操作系统、网络配置和连接方式等因素。 1. SSH连接:如果服务器使用的是Linux操作系统,可以通过SSH协议连接。需要使用SSH客户端工具,例如PuTTY,在登录页…...
线性代数-Python-05:矩阵的逆+LU分解
文章目录 1 矩阵的逆1.1 求解矩阵的逆 2 初等矩阵2.1 初等矩阵和可逆性 3 矩阵的LU分解3.1 LU分解的实现 1 矩阵的逆 1.1 求解矩阵的逆 def inv(A):if A.row_num() ! A.col_num():return Nonen A.row_num()"""矩阵A单位矩阵"""ls LinearSyste…...

shell实用脚本命令
1. declare declare 命令是一个非常常用的命令之一,它可以用来声明变量的类型和属性,比如变量的作用域、是否只读等等。 一、declare命令的基本用法 declare 命令可以用来声明变量,其最基本的用法如下:declare 变量名 在上面的命…...

STM32——端口复用与重映射概述与配置(HAL库)
文章目录 前言一、什么是端口复用?什么是重映射?有什么区别?二、端口复用配置 前言 本篇文章介绍了在单片机开发过程中使用的端口复用与重映射。做自我学习的简单总结,不做权威使用,参考资料为正点原子STM32F1系列精英…...
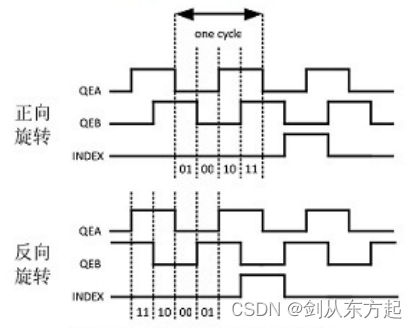
ABZ正交编码 - 异步电机常用的位置信息确定方式
什么是正交编码? ab正交编码器(又名双通道增量式编码器),用于将线性移位转换为脉冲信号。通过监控脉冲的数目和两个信号的相对相位,用户可以跟踪旋转位置、旋转方向和速度。另外,第三个通道称为索引信号&am…...
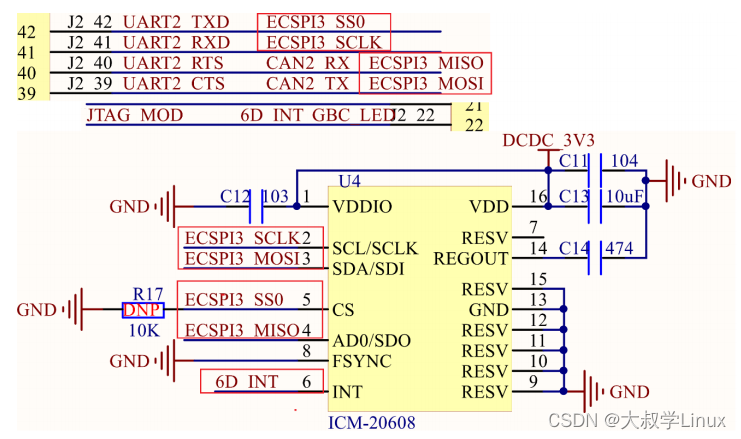
Linux学习第41天:Linux SPI 驱动实验(二):乾坤大挪移
Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长 本章的思维导图如下: 二、I.MX6U SPI主机驱动分析 主机驱动一般都是由SOC厂商写好的。不作为重点需要掌握的内容。 三、SPI设备驱动编写流程 1、SP…...

黑客泄露 3500 万条 LinkedIn 用户记录
被抓取的 LinkedIn 数据库分为两部分泄露:一部分包含 500 万条用户记录,第二部分包含 3500 万条记录。 LinkedIn 数据库保存了超过 3500 万用户的个人信息,被化名 USDoD 的黑客泄露。 该数据库在臭名昭著的网络犯罪和黑客平台 Breach Forum…...
Flink SQL -- 反压
1、测试反压: 1、反压: 指的是下游消费数据的速度比上游产生数据的速度要小时会出现反压,下游导致上游的Task反压。 2、测试反压:使用的是DataGen CREATE TABLE words (word STRING ) WITH (connector datagen,rows-per-second…...

快速入门安装及使用git与svn的区别常用命令
一、导言 1、什么是svn? SVN是Subversion的简称,是一个集中式版本控制系统。与Git不同,SVN没有分布式的特性。在SVN中,项目的代码仓库位于服务器上,团队成员通过向服务器提交和获取代码来实现版本控制。SVN记录了每个…...

超详细介绍如何使用 OpenCV 和 BGS 库进行背景扣除
深入研究这些 CV 系统背后的想法,我们可以观察到,在大多数情况下,初始步骤包含背景减除 (BS),这有助于获得视频流中对象的相对粗略和快速的识别,以便对其进行进一步的精细处理。在当前的文章中,我们将介绍几种在准确性和处理时间 BS 方法方面值得注意的算法:SuBSENSE和基…...

STM32F4、GD32F4 内部硬件CRC使用方法和踩坑实录
背景 某项目用到了IC卡刷卡启动功能,程序中对读取IC卡的相关数据后要进行CRC校验,本文介绍如何在STM32F4 GD32F4 平台上使用标准库函数进行CRC硬件校验。 摘要 本文介绍如何在STM32F4、GD32F4 平台上使用标准库函数进行CRC硬件校验。包括容易出现的问题和解决方法。涉及STM3…...
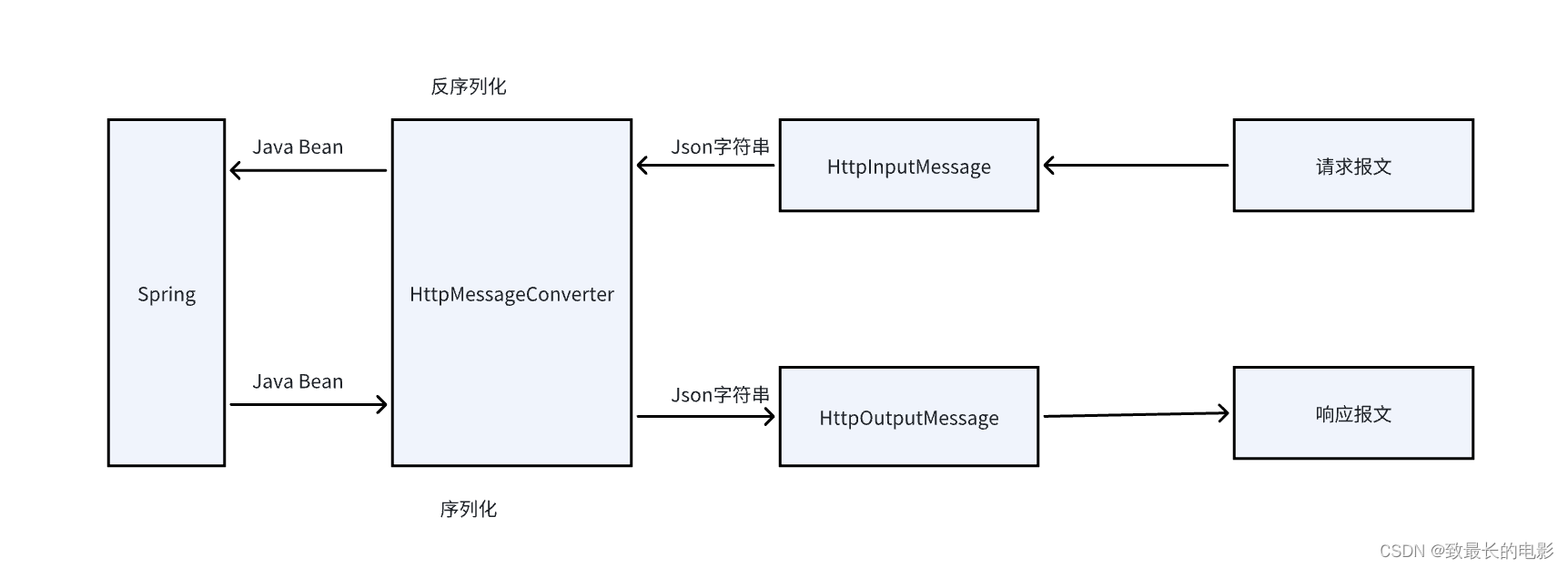
【SpringBoot】序列化和反序列化介绍
一、认识序列化和反序列化 Serialization(序列化)是一种将对象以一连串的字节描述的过程;deserialization(反序列化)是一种将这些字节重建成一个对象的过程。将程序中的对象,放入文件中保存就是序列化&…...

Android 升级软件后清空工厂模式测试进度
Android 升级软件后清空工厂模式测试进度 最近收到项目需求反馈:升级软件后,进入工厂模式测试项,界面显示测试项保留了升级前的测试状态(有成功及失败),需修改升级软件后默认清空测试项测试状态,具体修改参照如下: /…...

Promise原理、以及Promise.race、Promise.all、Promise.resolve、Promise.reject实现;
为了向那道光亮奔过去,他敢往深渊里跳; 于是今天朝着Promise的实现前进吧,写了四个小时,终于完结撒花; 我知道大家没有耐心,当然我也坐的腰疼,直接上代码,跟着我的注释一行行看过去…...
)
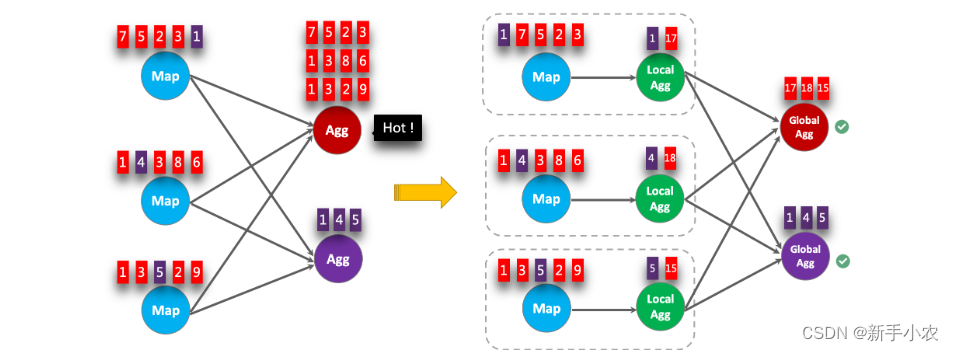
mysql---MHA(高可用)
MHA概述 magterhight availabulity :基于主库的高可用环境下,主故障切换基础要求:主从架构 (一主两从)解决mysql的单点故障问题,一旦数据库崩溃,MHA会在0-30s内这东东完成故障切换。复制方式:半…...

人工智能基础_机器学习032_多项式回归升维_原理理解---人工智能工作笔记0072
现在开始我们来看多项式回归,首先理解多维 原来我们学习的使用线性回归,其实就是一条直线对吧,那个是一维的,我们之前学的全部都是一维的对吧,是一维的,然后是多远的,因为有多个x1,x2,x3,x4... 但是比如我们有一个数据集,是上面这种,的如果用一条直线很难拟合,那么 这个时候,…...

C#截取范围
string[] strs new string[]{"1e2qe","23123e21","3ewqewq","4fewfew","5fsdfds"};var list strs[1..2];Range p 0..3;var list strs[Range];...
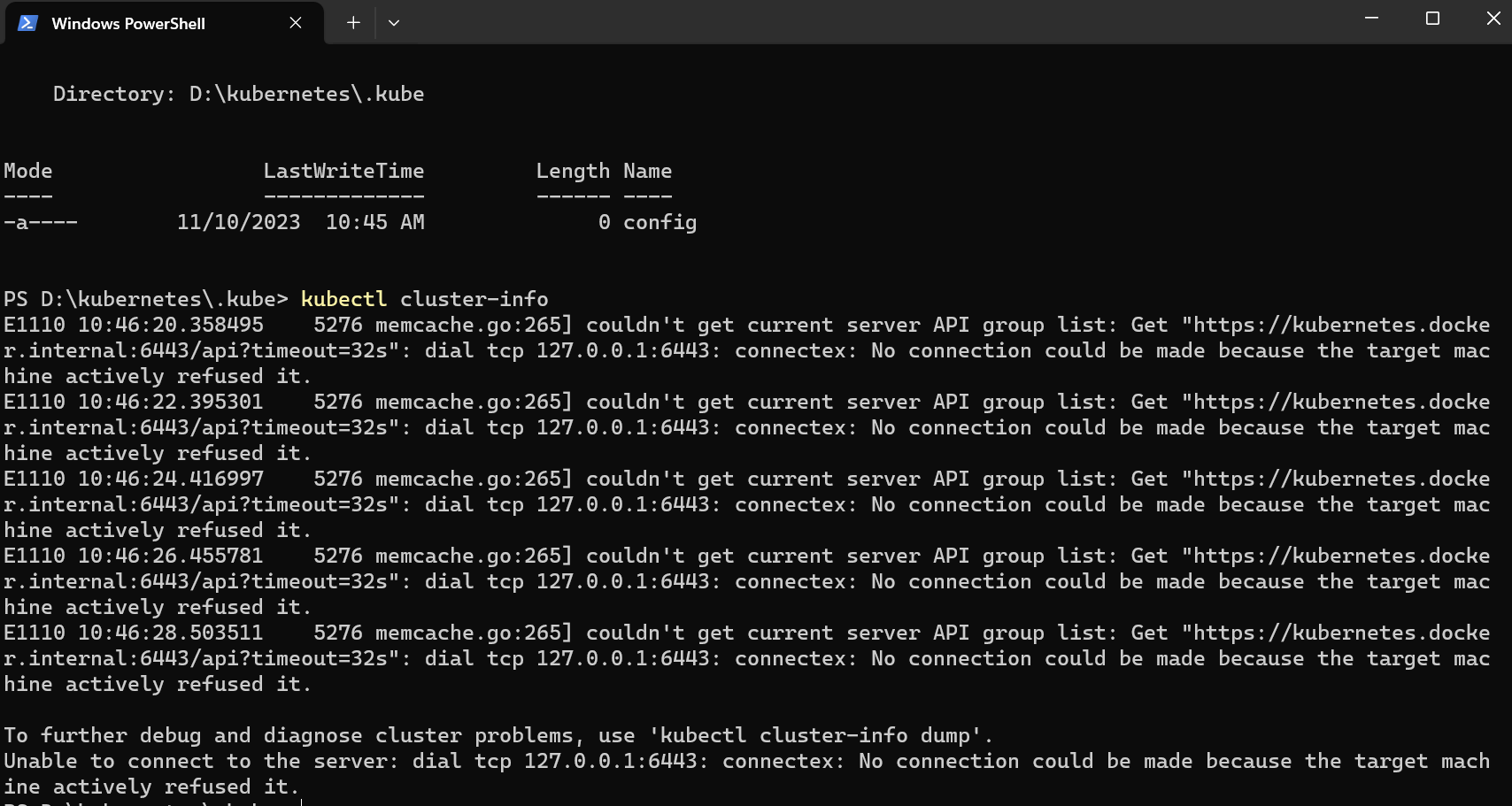
用 winget 在 Windows 上安装 kubectl
目录 kubectl 是什么? 安装 kubectl 以管理员身份打开 PowerShell 使用 winget 安装 kubectl 测试一下,确保安装的是最新版本 导航到你的 home 目录: 验证 kubectl 配置 kubectl 是什么? kubectl 是 Kubernetes 的命令行工…...
1 Supervised Machine Learning Regression and Classification
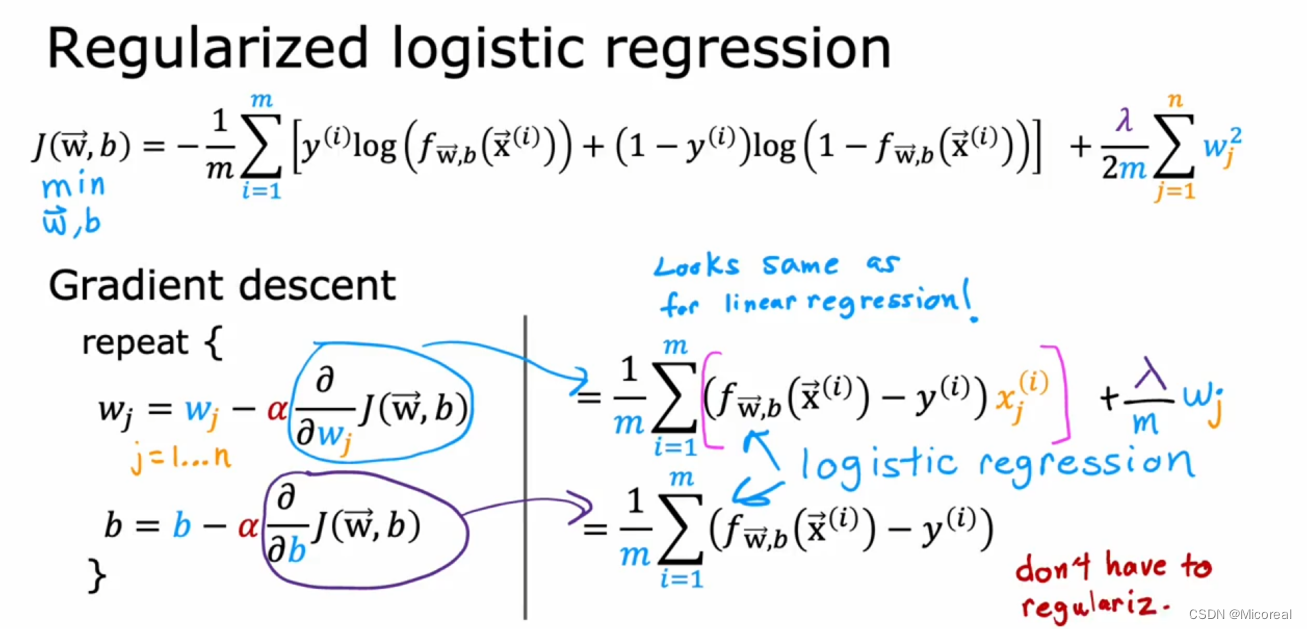
文章目录 Week1OverViewSupervised LearningUnsupervised LearningLinear Regression ModelCost functionGradient Descent Week2Muliple FeatureVectorizationGradient Descent for Multiple RegressionFeature ScalingGradient DescentFeature EngineeringPolynomial Regress…...

MCP Server生产级配置:Playwright与LLM集成的避坑指南
1. 这不是又一个“Playwright入门教程”,而是一份能直接塞进CI流水线的MCP Server生产级配置实录你有没有遇到过这样的场景:团队刚决定用AI驱动自动化测试,技术选型会上大家一致看好Playwright MCP(Model Context Protocol&#…...

别只拿PotPlayer看片了!挖掘它的采集录制功能,做Switch游戏存档大师
别把PotPlayer当普通播放器!解锁它的Switch游戏录制黑科技 你是否已经厌倦了在OBS、Bandicam等专业录制软件中反复调试参数的繁琐?是否想过那个每天用来看视频的PotPlayer,其实隐藏着令人惊喜的游戏录制能力?今天,我们…...

金融合规审核为何人力堆积却仍漏洞百出?2026年RegTech演进与Agent全链路闭环解决方案
在2026年的金融监管环境下,合规审核已不再是简单的“查漏补缺”,而是演变为一场高强度的算力与逻辑博弈。尽管金融机构在合规成本上的投入逐年攀升,甚至不惜以“人海战术”填补流程断点,但监管罚单的数额与频率却并未显著下降。这…...

告别浪费!SolidWorks企业级共享方案,实现降本增效全攻略
还在为 SolidWorks 高昂的硬件投入和混乱的图纸管理头疼?告别“一人一机”的浪费模式,企业级共享方案才是降本增效的正解。这套攻略基于“1 台高性能服务器 云飞云共享云桌面”架构,帮你把硬件成本砍掉 60%,把软件利用率翻倍。一…...

【与我学 ClaudeCode】协作篇 之 Worktree + Task Isolation :目录隔离的并行执行通道
作者:逆境不可逃 技术永无止境 希望我的内容可以帮助到你!!!! 大家吼 ! 我是 逆境不可逃 今天给大家带来文章《【与我学 ClaudeCode】协作篇 之 Worktree Task Isolation :目录隔离的并行执行通道》. Le…...

16个分片+2副本:pg_shard的master_create_worker_shards最佳实践
16个分片2副本:pg_shard的master_create_worker_shards最佳实践 【免费下载链接】pg_shard ATTENTION: pg_shard is superseded by Citus, its more powerful replacement 项目地址: https://gitcode.com/gh_mirrors/pg/pg_shard pg_shard作为PostgreSQL的分…...

Android Root检测绕过:从逆向分析到Frida分层Hook实战
1. 这不是“绕过root检测”,而是理解检测逻辑后的精准干预在安卓逆向工程的实际工作中,“过root检测”这个说法本身就容易引发误解——它听起来像某种黑箱魔法,仿佛只要套用某个脚本、加载某个插件,就能让App对设备状态“视而不见…...

为开源项目OpenClaw配置Taotoken作为其大模型服务后端
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为开源项目OpenClaw配置Taotoken作为其大模型服务后端 OpenClaw 是一个功能强大的开源工具,它允许开发者便捷地调用各类…...

还在古法编程?OpenAI Codex 全自动编程!稳定中转 Token 保姆级教程
OpenAI Codex 从安装到进阶实战|终端 AI 编程完全指南(2026 最新) 摘要:OpenAI Codex 是目前最强大的终端 AI 编程工具,支持代码生成、项目重构、Bug 修复、脚本自动化、批量代码优化等全场景能力。本文从零起步&…...
)
【独家首发】DeepSeek边缘计算白皮书未公开章节:3类典型场景QoS SLA保障公式(含实测RTT抖动衰减模型)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek边缘计算架构全景概览 DeepSeek边缘计算架构以“轻量、协同、自治”为核心设计理念,面向AI推理密集型场景构建端—边—云三级协同的分布式智能执行体。该架构并非传统云中心化模型的…...