深度学习 机器视觉 车位识别车道线检测 - python opencv 计算机竞赛
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 深度学习 机器视觉 车位识别车道线检测
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
简介
你是不是经常在停车场周围转来转去寻找停车位。如果你的车辆能准确地告诉你最近的停车位在哪里,那是不是很爽?事实证明,基于深度学习和OpenCV解决这个问题相对容易,只需获取停车场的实时视频即可。
检测效果
废话不多说, 先上效果图


注意车辆移动后空车位被标记上


车辆移动到其他车位

实现方式
整体思路
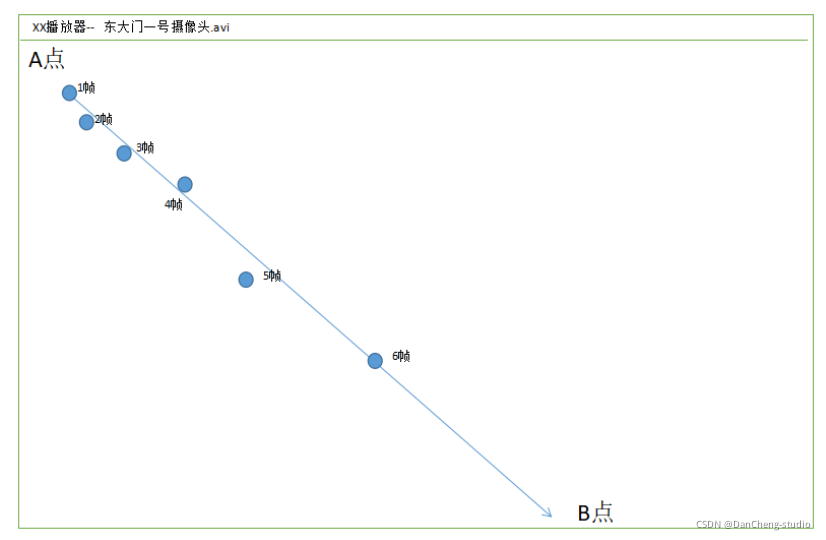
这个流程的第一步就是检测一帧视频中所有可能的停车位。显然,在我们能够检测哪个是没有被占用的停车位之前,我们需要知道图像中的哪些部分是停车位。
第二步就是检测每帧视频中的所有车辆。这样我们可以逐帧跟踪每辆车的运动。
第三步就是确定哪些车位目前是被占用的,哪些没有。这需要结合前两步的结果。
最后一步就是出现新车位时通知我。这需要基于视频中两帧之间车辆位置的变化。
这里的每一步,我们都可以使用多种技术用很多种方式实现。构建这个流程并没有唯一正确或者错误的方式,但不同的方法会有优劣之分。
使用要使用到两个视觉识别技术 :识别空车位停车线,识别车辆
检测空车位
车位探测系统的第一步是识别停车位。有一些技巧可以做到这一点。例如,通过在一个地点定位停车线来识别停车位。这可以使用OpenCV提供的边缘检测器来完成。但是如果没有停车线呢?
我们可以使用的另一种方法是假设长时间不移动的汽车停在停车位上。换句话说,有效的停车位就是那些停着不动的车的地方。但是,这似乎也不可靠。它可能会导致假阳性和真阴性。
那么,当自动化系统看起来不可靠时,我们应该怎么做呢?我们可以手动操作。与基于空间的方法需要对每个不同的停车位进行标签和训练不同,我们只需标记一次停车场边界和周围道路区域即可为新的停车位配置我们的系统。
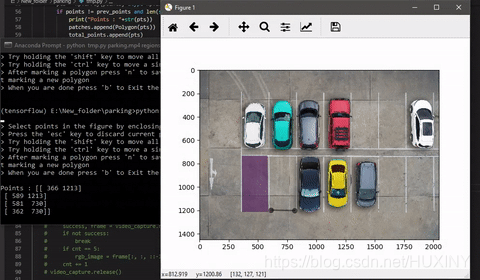
在这里,我们将从停车位的视频流中截取一帧,并标记停车区域。Python库matplotlib
提供了称为PolygonSelector的功能。它提供了选择多边形区域的功能。
我制作了一个简单的python脚本来标记输入视频的初始帧之一上的多边形区域。它以视频路径作为参数,并将选定多边形区域的坐标保存在pickle文件中作为输出。
import os
import numpy as np
import cv2
import pickle
import argparse
import matplotlib.pyplot as plt
from matplotlib.patches import Polygon
from matplotlib.widgets import PolygonSelector
from matplotlib.collections import PatchCollection
from shapely.geometry import box
from shapely.geometry import Polygon as shapely_polypoints = []
prev_points = []
patches = []
total_points = []
breaker = Falseclass SelectFromCollection(object):def __init__(self, ax):self.canvas = ax.figure.canvasself.poly = PolygonSelector(ax, self.onselect)self.ind = []def onselect(self, verts):global pointspoints = vertsself.canvas.draw_idle()def disconnect(self):self.poly.disconnect_events()self.canvas.draw_idle()def break_loop(event):global breakerglobal globSelectglobal savePathif event.key == 'b':globSelect.disconnect()if os.path.exists(savePath):os.remove(savePath)print("data saved in "+ savePath + " file") with open(savePath, 'wb') as f:pickle.dump(total_points, f, protocol=pickle.HIGHEST_PROTOCOL)exit()def onkeypress(event):global points, prev_points, total_pointsif event.key == 'n': pts = np.array(points, dtype=np.int32) if points != prev_points and len(set(points)) == 4:print("Points : "+str(pts))patches.append(Polygon(pts))total_points.append(pts)prev_points = pointsif __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('video_path', help="Path of video file")parser.add_argument('--out_file', help="Name of the output file", default="regions.p")args = parser.parse_args()global globSelectglobal savePathsavePath = args.out_file if args.out_file.endswith(".p") else args.out_file+".p"print("\n> Select a region in the figure by enclosing them within a quadrilateral.")print("> Press the 'f' key to go full screen.")print("> Press the 'esc' key to discard current quadrilateral.")print("> Try holding the 'shift' key to move all of the vertices.")print("> Try holding the 'ctrl' key to move a single vertex.")print("> After marking a quadrilateral press 'n' to save current quadrilateral and then press 'q' to start marking a new quadrilateral")print("> When you are done press 'b' to Exit the program\n")video_capture = cv2.VideoCapture(args.video_path)cnt=0rgb_image = Nonewhile video_capture.isOpened():success, frame = video_capture.read()if not success:breakif cnt == 5:rgb_image = frame[:, :, ::-1]cnt += 1video_capture.release()while True:fig, ax = plt.subplots()image = rgb_imageax.imshow(image)p = PatchCollection(patches, alpha=0.7)p.set_array(10*np.ones(len(patches)))ax.add_collection(p)globSelect = SelectFromCollection(ax)bbox = plt.connect('key_press_event', onkeypress)break_event = plt.connect('key_press_event', break_loop)plt.show()globSelect.disconnect()
车辆识别
要检测视频中的汽车,我使用Mask-
RCNN。它是一个卷积神经网络,对来自几个数据集(包括COCO数据集)的数百万个图像和视频进行了训练,以检测各种对象及其边界。 Mask-
RCNN建立在Faster-RCNN对象检测模型的基础上。
除了每个检测到的对象的类标签和边界框坐标外,Mask RCNN还将返回图像中每个检测到的对象的像pixel-wise mask。这种pixel-wise
masking称为“ 实例分割”。我们在计算机视觉领域所看到的一些最新进展,包括自动驾驶汽车、机器人等,都是由实例分割技术推动的。
M-RCNN将用于视频的每一帧,它将返回一个字典,其中包含边界框坐标、检测对象的masks、每个预测的置信度和检测对象的class_id。现在使用class_ids过滤掉汽车,卡车和公共汽车的边界框。然后,我们将在下一步中使用这些框来计算IoU。
由于Mask-RCNN比较复杂,这里篇幅有限,需要mask-RCNN的同学联系博主获取, 下面仅展示效果:

最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
深度学习 机器视觉 车位识别车道线检测 - python opencv 计算机竞赛
0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习 机器视觉 车位识别车道线检测 该项目较为新颖,适合作为竞赛课题方向,学长非常推荐! 🥇学长这里给一个题目综合评分(每项满分5分) …...
Java主流分布式解决方案多场景设计与实战
Java的主流分布式解决方案的设计和实战涉及到多个场景,包括但不限于以下几点: 分布式缓存:在Java的分布式系统中,缓存是非常重要的一部分。常用的分布式缓存技术包括Redis、EhCache等。这些缓存技术可以用来提高系统的性能和响应…...

docker安装MongoDB数据库,并且进行密码配置
很美的一首小诗> 我在外面流浪,回来时 故乡瘦了一圈—— 墩子叔走了,门前的池水 干了一半。 屋后驼背的柳树 头发散落了一地, 老房子蹲在坟边,屋顶的白云 仍在风中奔跑。 安装配置 要在Docker中安装MongoDB并启用远程连接&…...
ssh脚本找不到命令或者执行无效的解决办法
如图:今天在编写脚本时发现的这个问题, 在排除脚本语法错误、编码格式等情况下,仍然出现“bash 。。未找到命令”的字样 解决办法: 给每台虚拟机的环境变量source一下: 命令如下 source /etc/profile或者输入 vim ~…...

2023年11月18日(星期六)骑行海囗林场公园
2023年11月18日 (星期六) 骑行海囗林场公园(赏枫树林),早8:30到9:00, 大观公园门囗集合,9:30准时出发 【因迟到者,骑行速度快者,可自行追赶偶遇。】 偶遇地点:大观公园门口集合 ,家住东&#x…...

xss 漏洞
1、XSS类型 XSS攻击大致上分为3类: 反射型xss,DOM型xss,存储型xss。前两类为非持久性xss,后者为持久型xss。 1.1 非持久型xss: 1)反射型 XSS 攻击相对于访问者而言是一次性的,具体表现在恶意…...

一文图解爬虫_姊妹篇(spider)
—引导语 爬虫,没有一个时代比当前更重视它。一个好的爬虫似乎可以洞穿整个互联网,“来装满自己的胃”。 接上一篇:一文图解爬虫(spider) 博主已初步对爬虫的“五脏六腑”进行了解剖。虽然俗称“爬虫”,但窃…...

【vue实战项目】通用管理系统:api封装、404页
前言 本文为博主的vue实战小项目系列中的第三篇,很适合后端或者才入门的小伙伴看,一个前端项目从0到1的保姆级教学。前面的内容: 【vue实战项目】通用管理系统:登录页-CSDN博客 【vue实战项目】通用管理系统:封装to…...

R语言编写代码示例
R语言编写的爬虫程序,使用了requests库来发送请求,使用BeautifulSoup库来解析HTML。 r # 第一步,安装必要的库 install.packages("xml2") install.packages("requests") install.packages("httr") install.pac…...

[RK3568][Android12.0]--- 系统自带预置第三方APK方法
Platform: RK3568 OS: Android 12.0 Kernel: 4.19 Rockchip默认提供了机制来预置第三方APK, 方法很简单: 1. 在device/rockchip/rk3568创建preinstall目录(如果要可卸载,那就创建preinstall_del目录) 2. 将你要预安装的APK放进此目录即可 preinstall 不…...

数据分析场景下,企业如何做好大模型选型和落地?
在数据驱动的数字化时代,有效的数据分析已成为企业成功的关键因素。而随着大模型带来能力突破,让AI与数据分析相互结合,使分析结果更好支撑业务,促进企业内部数据价值释放,成为了当下企业用户尤为关注的话题。 如何按照…...

使用VScode编译betaflight固件--基于windows平台
使用VScode编译betaflight固件--基于windows平台 1、使用git克隆betaflight的开源代码2、betaflight的代码框架分析:3、配置编译环境:4、VScode上编译 betaflight不仅可以在LInux上进行编译也可以在Windows上编译,本文主要介绍在windows平台上…...

OkHttp网络请求读写超时
查看OkHttp的源码: OkHttpClient 的 Builder() public Builder() {...callTimeout 0;connectTimeout 10_000;readTimeout 10_000;writeTimeout 10_000;... } callTimeout:整个请求的超时时间,如果设置了这个值,则总超时时间…...
@postmapping 定义formdata传参方式
背景:feign声明接口,传对象, 但是对象那边没有用requestBody接收; 前端调它也是走的formdata,所以不改变源代码,以及补新接口的情况下,我也需要formdata传参; 不然数据传不过去会为空…...

Windows客户端开发框架WPF简介
一、WPF简介 WPF的全称是Windows Presentation Foundation,WPF是 Microsoft 提供的一种用于构建桌面应用程序的 UI 框架。它包含在 .NET Framework 中,从 .NET 3.0 版本开始就被引入。 以下是一些关于 WPF 的关键特性: 1. XAML:…...

2023NOIP A层联测32 sakuya
题目大意 有一棵有 n n n个节点的树,每条边有一个边权 w w w。有 m m m个特殊点,将这些点记为集合 A A A。 将 A A A中的元素随机打乱得到序列 a a a,求 ∑ i 2 m d ( a i − 1 , a i ) \sum\limits_{i2}^md(a_{i-1},a_i) i2∑md(ai−1…...
竞赛选题 深度学习的视频多目标跟踪实现
文章目录 1 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于深度学习的视频多目标跟踪实现 …...
金蝶云星空表单插件获取控件值
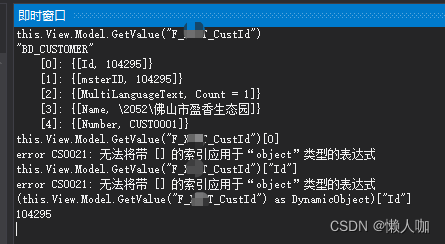
文章目录 金蝶云星空表单插件获取控件值获取主键获取文本获取日期获取数值获取基础资料 金蝶云星空表单插件获取控件值 获取主键 正确: this.View.Model.GetPKValue();错误: 获取文本 this.View.Model.GetValue("FBILLNO")获取日期 thi…...

docker自启与容器自启
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...
一、认识微服务
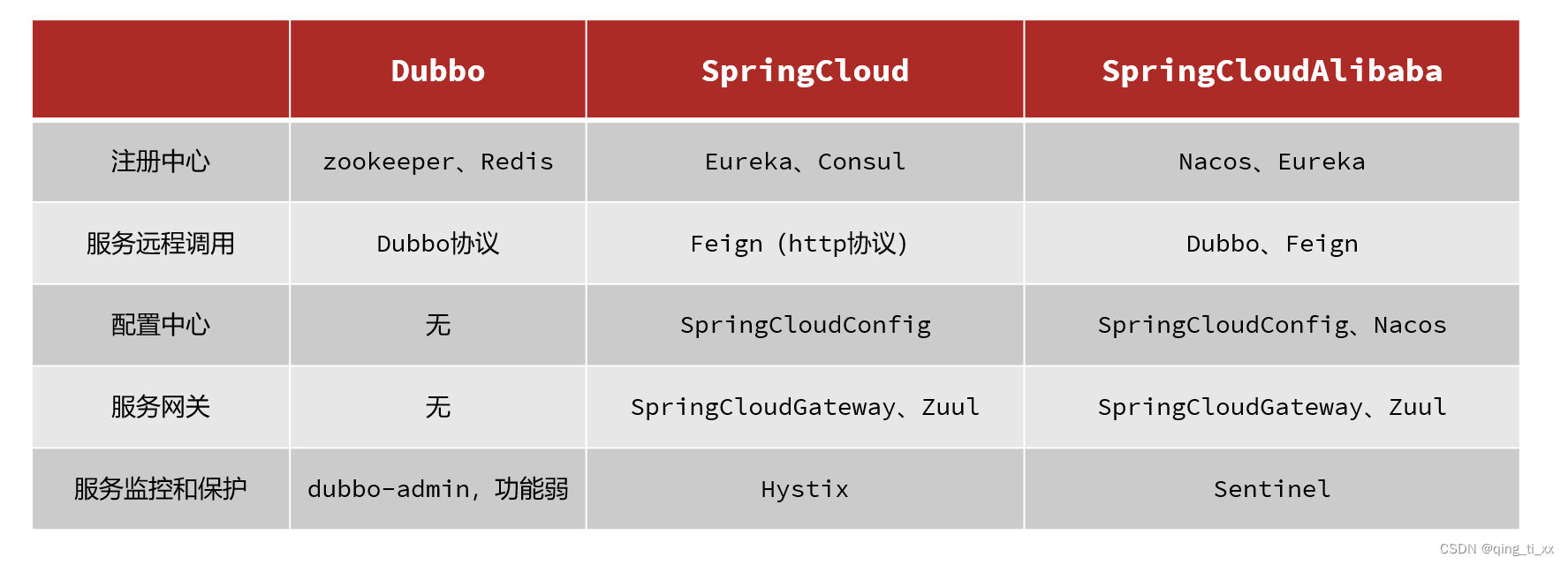
目录 一、单体架构 二、分布式架构 三、微服务 1、微服务架构特征: 1.单一职责: 2.面向服务: 3.自治: 4.隔离性强: 2、微服务结构: 3、微服务技术对比: 一、单体架构 二、分布式架构 三…...

基于ATtiny84的智能冰箱监控器:低功耗温度与门状态监测方案
1. 项目概述:一个装在树莓派盒子里的智能冰箱管家如果你家里有台老冰箱,或者对食物储存温度特别在意,总担心冰箱门没关严或者突然断电导致内部升温,那么这个自己动手做的“冰箱看门狗”项目就太适合你了。它本质上是一个高度定制化…...
)
告别硬编码!在UE5.1里用蓝图动态配置MySQL连接参数(控件蓝图实战)
动态配置MySQL连接:UE5.1控件蓝图的工程化实践在游戏开发中,数据库连接往往是项目架构中不可或缺的一环。传统硬编码方式虽然简单直接,却带来了维护困难、安全性差、灵活性低等一系列问题。本文将深入探讨如何在UE5.1中构建一个完全动态化的M…...

破解材料数据荒:合成数据与随机森林预测聚合物阻燃性能
1. 项目概述与核心挑战在材料研发领域,尤其是涉及公共安全的聚合物阻燃性研究,传统实验方法正面临巨大瓶颈。想象一下,你是一位材料工程师,需要设计一种用于高铁内饰或高层建筑电缆护套的新型聚合物,其阻燃性能必须满足…...

总线式智能提示灯系统设计:从恒流驱动到模块化架构
1. 项目概述:从传统到智能的剧场提示灯系统革新在剧场、演播室或者大型活动现场的后台,如果你待过,一定对那套“红灯停,绿灯行”的提示灯系统不陌生。导演或舞台监督通过对讲机喊“Standby”(准备)…...

Elden Ring帧率解锁终极指南:从60帧到144+的完整教程
Elden Ring帧率解锁终极指南:从60帧到144的完整教程 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/Elden…...

3个实用场景教你轻松解锁网易云音乐NCM加密文件:ncmdumpGUI完整指南
3个实用场景教你轻松解锁网易云音乐NCM加密文件:ncmdumpGUI完整指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经下载了网易云音乐的…...

如何快速定制Office界面:终极开源工具使用指南
如何快速定制Office界面:终极开源工具使用指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-editor O…...

遭遇薪酬倒挂后的反向谈判与资产重估策略「蒸汽求职分享」
在 2026 年全球科技大厂与跨国泛金融巨头追求极致人效、频繁进行组织架构重组(Reorg)的买方市场中,一个让无数海外名校留学生在入职两年后心态瞬间崩塌的现象,正在高频发生——“薪酬倒挂(Salary Inversion)…...

昇腾CANN cmake 实战:CANN CMake 构建系统——跨平台编译配置与模块化管理
8 个 CANN 仓库各需独立构建(ops-transformer/ops-nn/hccl/ge/…)→ 手写 8 套 CMakeLists.txt(CANN 路径判断、跨 NPU 型号编译、第三方库兼容)。cmake 仓库提供统一的 FindCANN.cmake CANNConfig.cmake 模板——任何仓库只需 f…...

AI 应用原型开发阶段利用 Taotoken 快速进行多模型效果对比
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 AI 应用原型开发阶段利用 Taotoken 快速进行多模型效果对比 在构建一个 AI 应用的原型时,开发者常常面临一个核心问题&…...