自学SLAM(8)《第四讲:相机模型与非线性优化》作业
前言

小编研究生的研究方向是视觉SLAM,目前在自学,本篇文章为初学高翔老师课的第四次作业。
文章目录
- 前言
- 1.图像去畸变
- 2.双目视差的使用
- 3.矩阵微分
- 4.高斯牛顿法的曲线拟合实验
1.图像去畸变
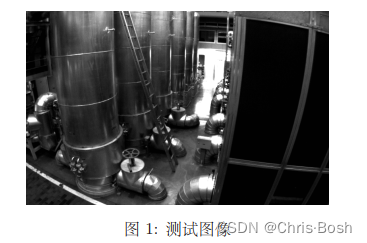
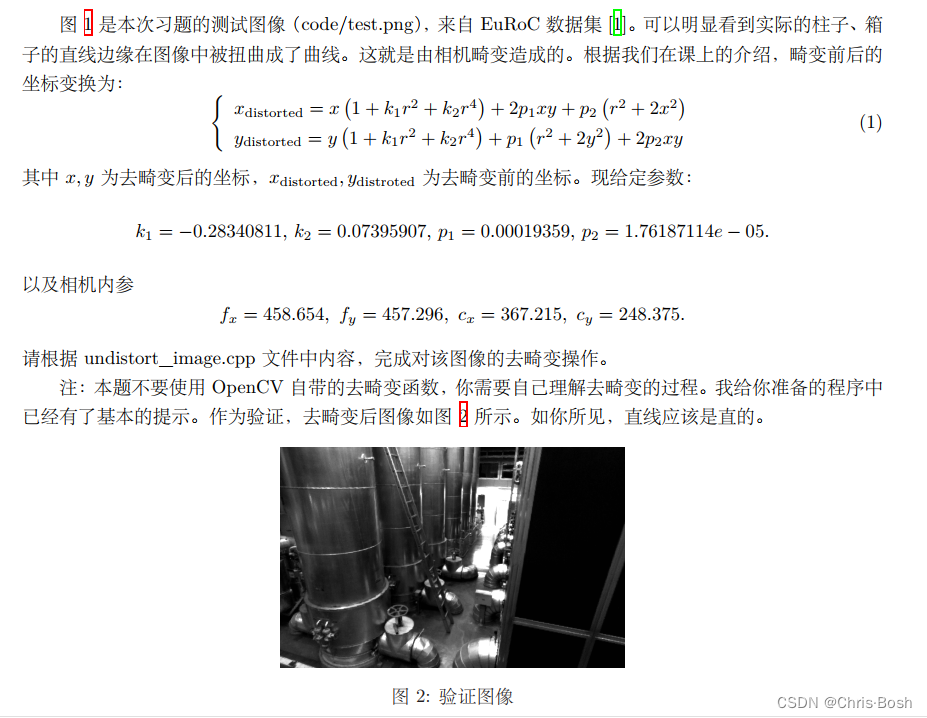
现实⽣活中的图像总存在畸变。原则上来说,针孔透视相机应该将三维世界中的直线投影成直线,但是当我们使⽤⼴⾓和鱼眼镜头时,由于畸变的原因,直线在图像⾥看起来是扭曲的。本次作业,你将尝试如何对⼀张图像去畸变,得到畸变前的图像。
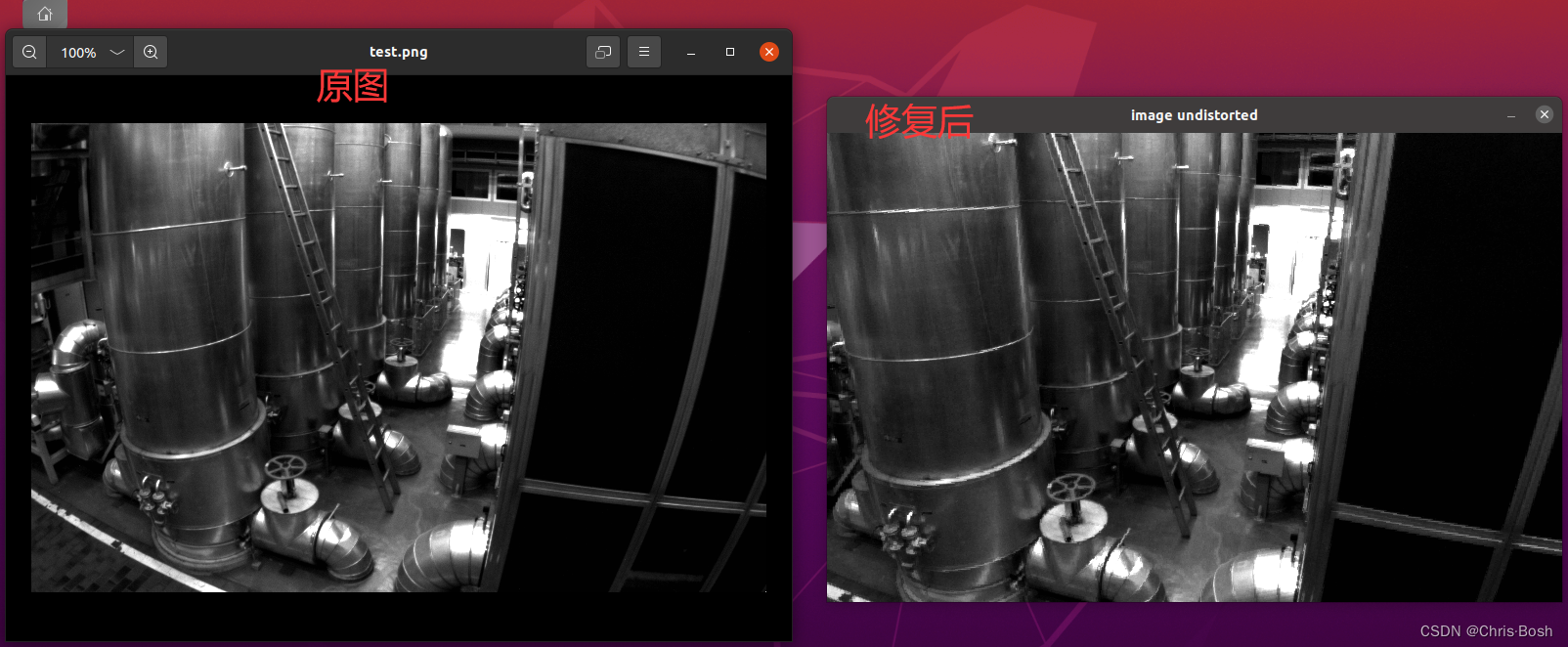
对于畸变,用两张鲜明的照片来展示:

undistort_image.cpp:
//
// Created by ljh on 2023/11/5.
//#include <opencv2/opencv.hpp>
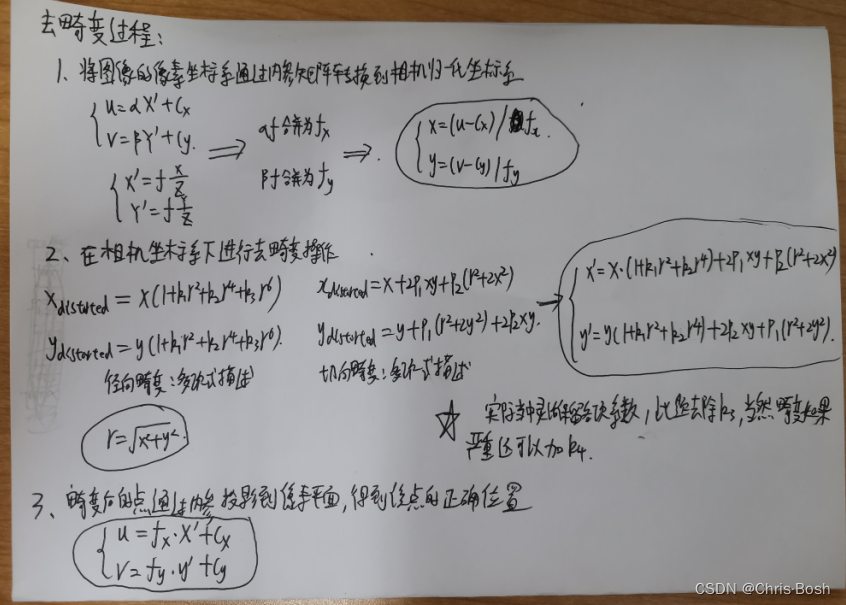
#include <string>using namespace std;string image_file = "/home/lih/video4_homework/homework1/test.png"; // 请确保路径正确int main(int argc, char **argv) {// 本程序需要你自己实现去畸变部分的代码。尽管我们可以调用OpenCV的去畸变,但自己实现一遍有助于理解。// 畸变参数double k1 = -0.28340811, k2 = 0.07395907, p1 = 0.00019359, p2 = 1.76187114e-05;// 内参double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;cv::Mat image = cv::imread(image_file,0); // 图像是灰度图,CV_8UC1int rows = image.rows, cols = image.cols;cv::Mat image_undistort = cv::Mat(rows, cols, CV_8UC1); // 去畸变以后的图// 计算去畸变后图像的内容for (int v = 0; v < rows; v++)for (int u = 0; u < cols; u++) {double u_distorted = 0, v_distorted = 0;// TODO 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted) (~6 lines)// start your code here// 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted)
double x = (u-cx)/fx, y = (v-cy)/fy; // 计算图像点坐标到光心的距离;
double r = sqrt(x*x+y*y);// 计算投影点畸变后的点
double x_distorted = x*(1+k1*r+k2*r*r)+2*p1*x*y+p2*(r+2*x*x);
double y_distorted = y*(1+k1*r+k2*r*r)+2*p2*x*y+p1*(r+2*y*y); // 把畸变后的点投影回去
u_distorted = x_distorted*fx+cx;
v_distorted = y_distorted*fy+cy;// end your code here// 赋值 (最近邻插值)if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows) {image_undistort.at<uchar>(v, u) = image.at<uchar>((int) v_distorted, (int) u_distorted);} else {image_undistort.at<uchar>(v, u) = 0;}}// 画图去畸变后图像cv::imshow("image undistorted", image_undistort);cv::waitKey();return 0;
}
string image_file = “/home/lih/video4_homework/homework1/test.png”; // 填写你自己的图片路径
CMakeLists.txt:
cmake_minimum_required(VERSION 2.8)PROJECT(undistort_image)IF(NOT CMAKE_BUILD_TYPE) #(可选)如果没有指定cmake编译模式,就选择Relealse模式,必须写成三行SET(CMAKE_BUILD_TYPE Release)
ENDIF()MESSAGE("Build type: " ${CMAKE_BUILD_TYPE}) #终端打印cmake编译模式的信息set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 -march=native ") #添加c标准支持库
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 -march=native") #添加c++标准支持库# Check C++11 or C++0x support #检查c++11或c++0x标准支持库
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")add_definitions(-DCOMPILEDWITHC11)message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")add_definitions(-DCOMPILEDWITHC0X)message(STATUS "Using flag -std=c++0x.")
else()message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()find_package(OpenCV 3.0 QUIET) #find_package(<Name>)命令首先会在模块路径中寻找 Find<name>.cmake
if(NOT OpenCV_FOUND)find_package(OpenCV 2.4.3 QUIET)if(NOT OpenCV_FOUND)message(FATAL_ERROR "OpenCV > 2.4.3 not found.")endif()
endif()include_directories(${OpenCV_INCLUDE_DIRS})add_executable(image undistort_image.cpp)#链接OpenCV库
target_link_libraries(image ${OpenCV_LIBS})然后
mkdir build
cd build
cmake …
make
./image
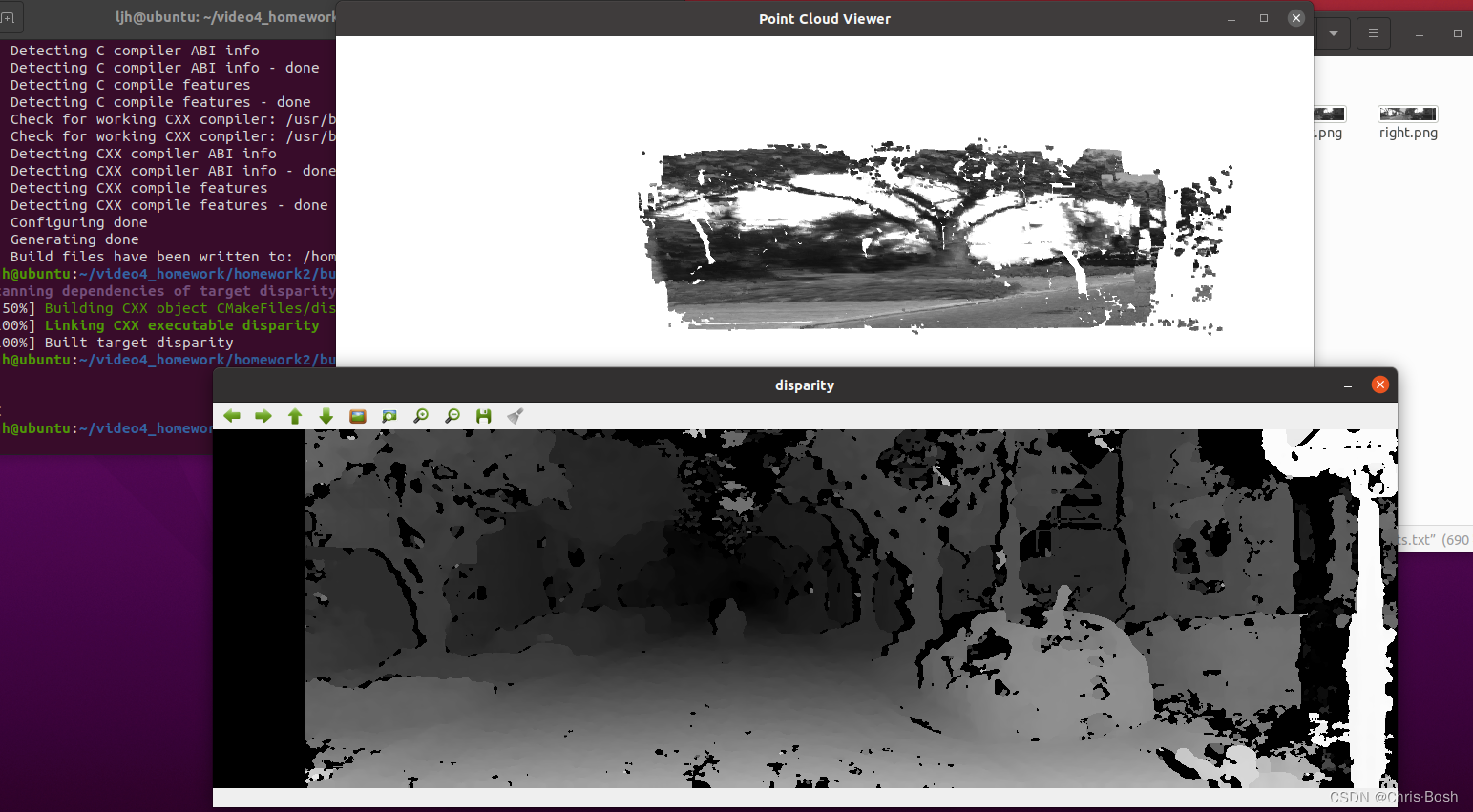
2.双目视差的使用
双⽬相机的⼀⼤好处是可以通过左右⽬的视差来恢复深度。课程中我们介绍了由视差计算深度的过程。本题,你需要根据视差计算深度,进⽽⽣成点云数据。本题的数据来⾃Kitti 数据集 [2]。 Kitti中的相机部分使⽤了⼀个双⽬模型。双⽬采集到左图和右图,然后我们可以通过左右视图恢复出深度。经典双⽬恢复深度的算法有 BM(Block Matching), SGBM(Semi-Global Matching)[3, 4]等,但本题不探讨⽴体视觉内容(那是⼀个⼤问题)。我们假设双⽬计算的视差已经给定,请你根据双⽬模型,画出图像对应的点云,并显⽰到 Pangolin 中。题给定的左右图见 code/left.png 和 code/right.png,视差图亦给定,见code/right.png。双⽬的参数如下:
fx= 718.856; fy = 718.856; cx =607.1928; cy = 185.2157
且双⽬左右间距(即基线)为:
d = 0.573 m
请根据以上参数,计算相机数据对应的点云,并显⽰到 Pangolin 中。程序请code/disparity.cpp ⽂件。

disparity.cpp:
// start your code here// 根据双目模型计算 point 的位置double x = (u - cx) / fx;double y = (v - cy) / fy;double depth = fx * b / (disparity.at<float>(v, u));point[0] = x * depth;point[1] = y * depth;point[2] = depth;// end your code heredouble x和double y的计算方式和上一题一样,depth就算如下:

计算出depth后,那么point模仿课上五对图片那个实践仿写即可。只不过实践中的d(视差)没有给出,而此题中视差d已给,所以公式写出来略有不同。
CMakeLists.txt:
cmake_minimum_required( VERSION 2.8 )
project(stereoVision)
set( CMAKE_CXX_FLAGS "-std=c++11 -O3")include_directories("/usr/include/eigen3")
find_package(Pangolin REQUIRED)
include_directories( ${Pangolin_INCLUDE_DIRS} )find_package(OpenCV 3.0 QUIET) #find_package(<Name>)命令首先会在模块路径中寻找 Find<name>.cmake
if(NOT OpenCV_FOUND)find_package(OpenCV 2.4.3 QUIET)if(NOT OpenCV_FOUND)message(FATAL_ERROR "OpenCV > 2.4.3 not found.")endif()
endif()include_directories(${OpenCV_INCLUDE_DIRS})add_executable(disparity disparity.cpp)
target_link_libraries(disparity ${OpenCV_LIBRARIES})
target_link_libraries(disparity ${Pangolin_LIBRARIES})
然后就是编译五部曲:
mkdir build
cd build
cmake …
make
./disparity
如果你出现了这张图片,那就是你的disparity.cpp中的图片位置没有写对,找不到图片所导致的!!

运行成功如下:
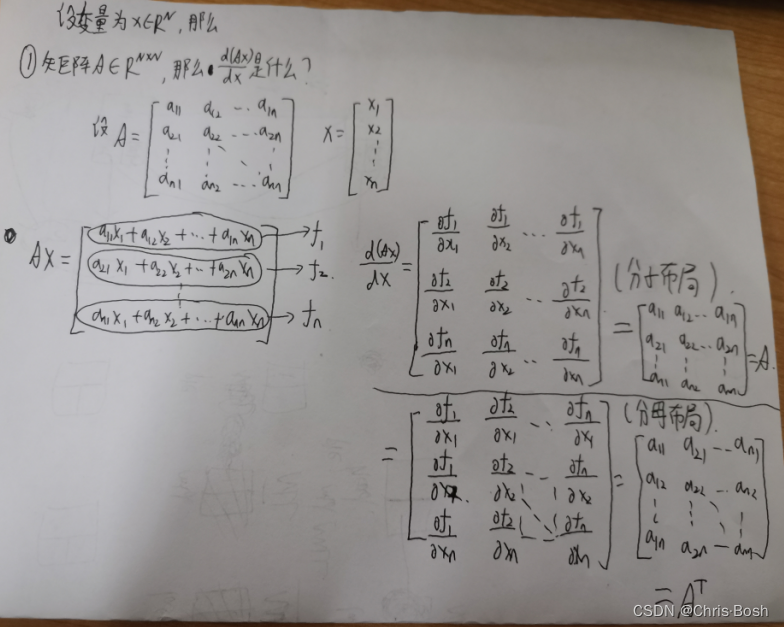
3.矩阵微分
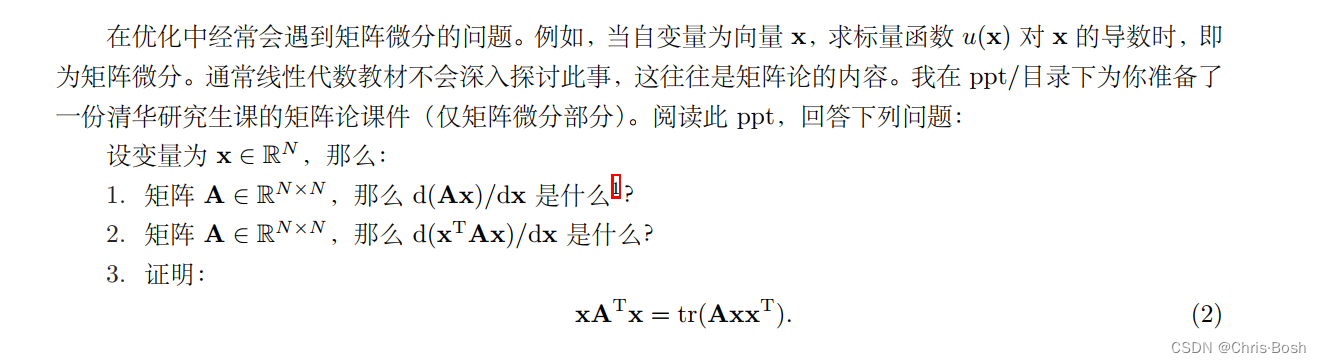
①第一问:如果大家有不理解的地方可以看看这个印度三哥的视屏,我认为讲的还是非常清晰的,至少我搜了很多国内的都没有这个讲得好,虽然语言不通,但是一点都不影响学习。高博的清华PPT还是不适合我这种人看。
链接:
矩阵求导讲解
②第二问:如果大家有不理解的地方可以看看这个印度三哥的视屏,我认为讲的还是非常清晰的,至少我搜了很多国内的都没有这个讲得好,虽然语言不通,但是一点都不影响学习。高博的清华PPT还是不适合我这种人看。
链接:
矩阵求导讲解
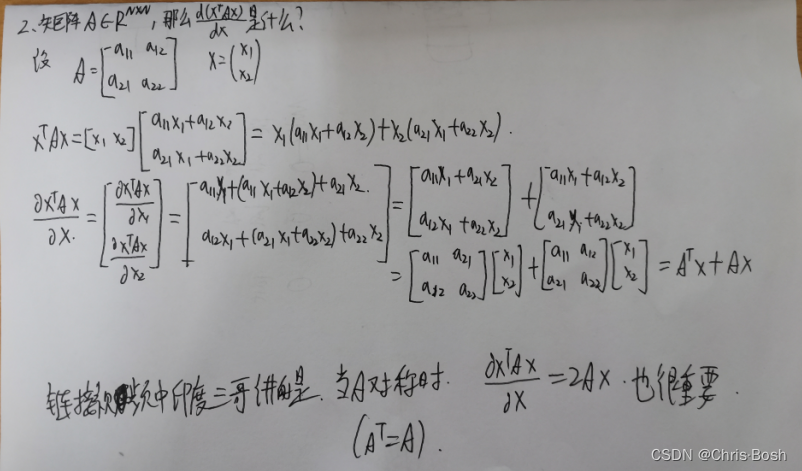
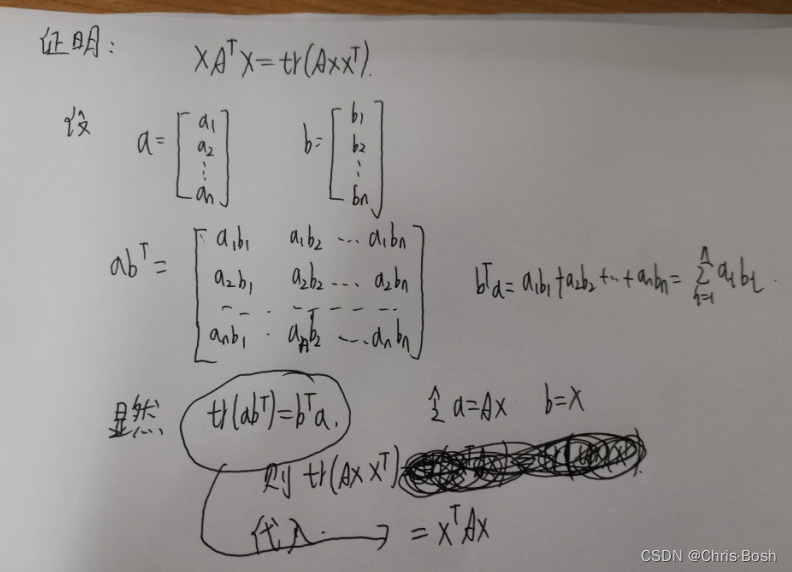
③第三问:
4.高斯牛顿法的曲线拟合实验
当然我觉得大家很有必要了解一下这一块的由来,我的上一篇博客讲述了海斯矩阵,凸函数等基本概念,大家看这个之前我认为很必要学习一下: 链接:
SLAM第四讲实践中的最优化知识
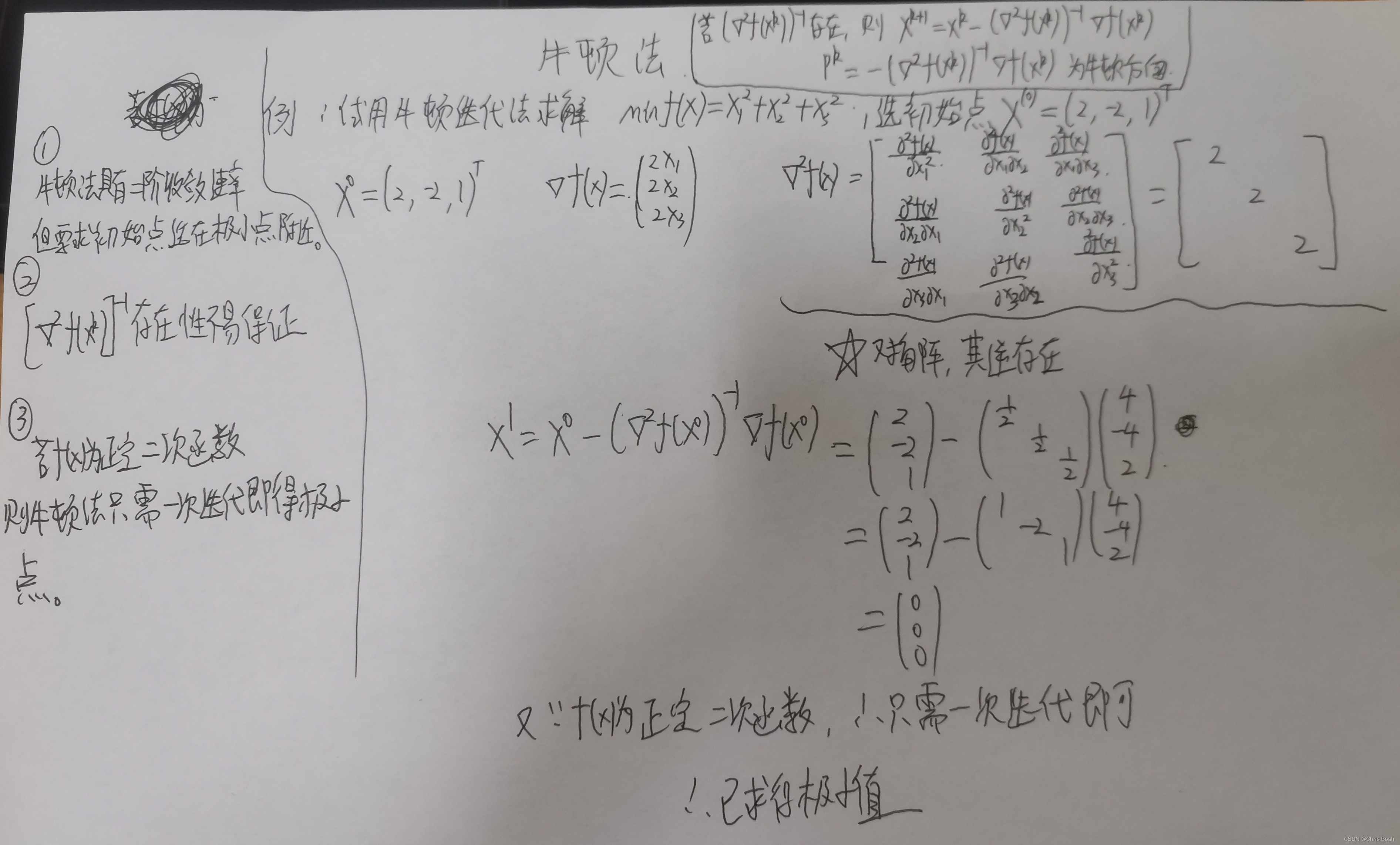
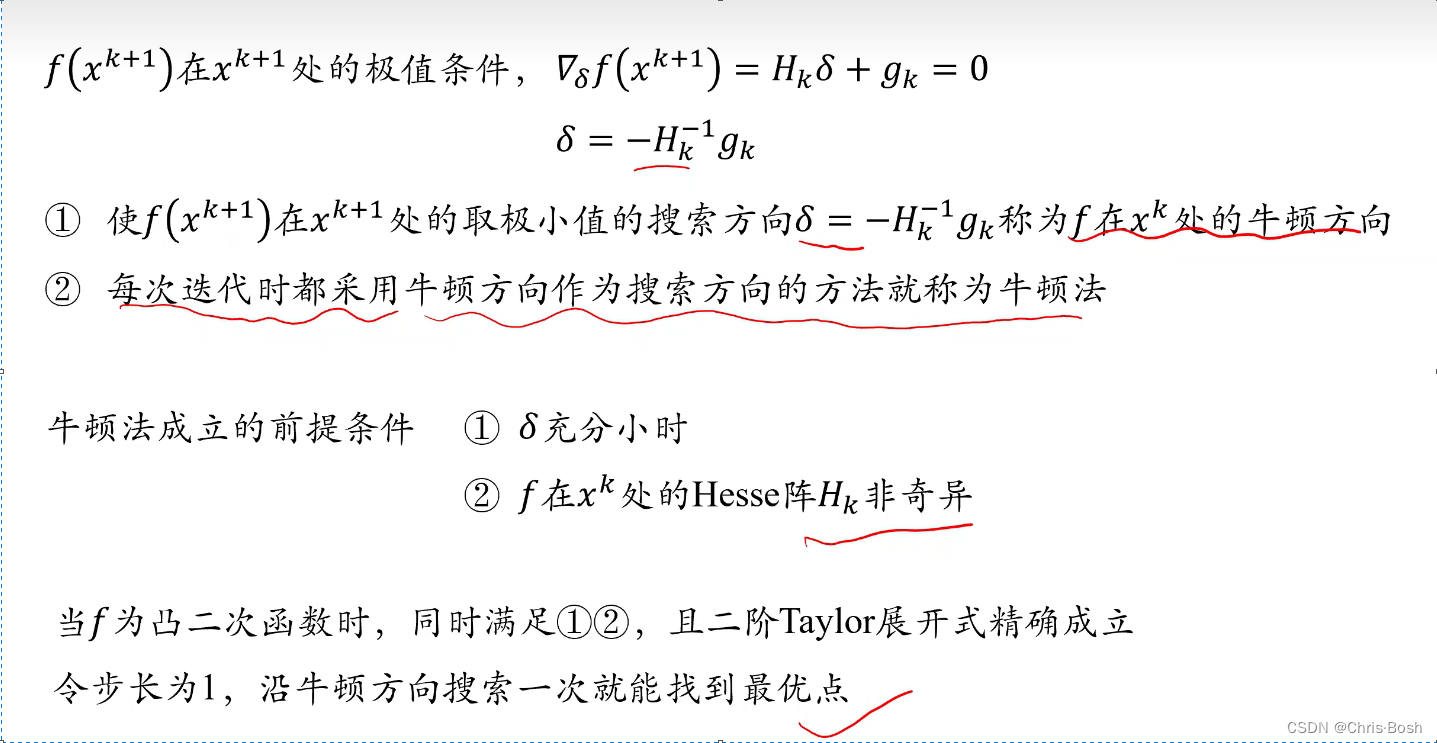
在做这道题之前我们非常有必要了解一下什么是牛顿法法,因为高斯牛顿法是牛顿法的改进,我以一道最优化的简单立体让你明白什么是牛顿法:
下来我们再看高斯牛顿法,我搜查了很多资料,很难找到一道高斯牛顿法的数学题来让大家理解,所以我只能找到一个更为详细点的高斯牛顿法的计算步骤让大家理解:
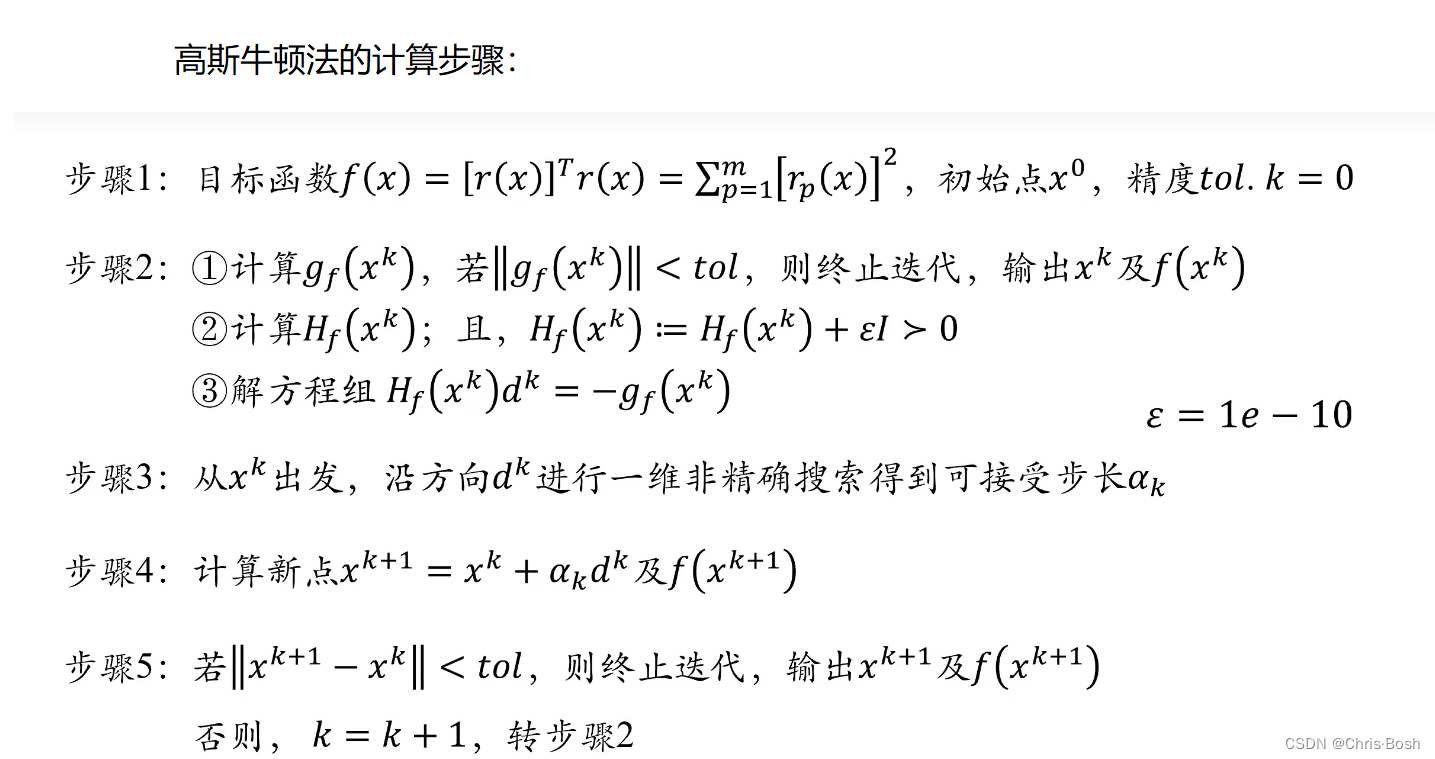
到这里,我们开始做题:
gaussnewton.cpp:
#include <iostream>
#include <chrono>
#include <opencv2/opencv.hpp>
#include <Eigen/Core>
#include <Eigen/Dense>using namespace std;
using namespace Eigen;int main(int argc, char **argv) {double ar = 1.0, br = 2.0, cr = 1.0; // 真实参数值double ae = 2.0, be = -1.0, ce = 5.0; // 估计参数值int N = 100; // 数据点double w_sigma = 1.0; // 噪声Sigma值double inv_sigma = 1.0 / w_sigma;cv::RNG rng; // OpenCV随机数产生器vector<double> x_data, y_data; // 数据for (int i = 0; i < N; i++) {double x = i / 100.0;x_data.push_back(x);y_data.push_back(exp(ar * x * x + br * x + cr) + rng.gaussian(w_sigma * w_sigma));}// 开始Gauss-Newton迭代int iterations = 100; // 迭代次数double cost = 0, lastCost = 0; // 本次迭代的cost和上一次迭代的costchrono::steady_clock::time_point t1 = chrono::steady_clock::now();for (int iter = 0; iter < iterations; iter++) {Matrix3d H = Matrix3d::Zero(); // Hessian = J^T W^{-1} J in Gauss-NewtonVector3d b = Vector3d::Zero(); // biascost = 0;for (int i = 0; i < N; i++) {double xi = x_data[i], yi = y_data[i]; // 第i个数据点double error = yi - exp(ae * xi * xi + be * xi + ce);//计算雅可比矩阵J(Xk)和误差f(Xk)Vector3d J; // 雅可比矩阵J[0] = -xi * xi * exp(ae * xi * xi + be * xi + ce); // de/daJ[1] = -xi * exp(ae * xi * xi + be * xi + ce); // de/dbJ[2] = -exp(ae * xi * xi + be * xi + ce); // de/dcH += inv_sigma * inv_sigma * J * J.transpose();b += -inv_sigma * inv_sigma * error * J;cost += error * error;}// 求解线性方程 Hx=bVector3d dx = H.ldlt().solve(b);if (isnan(dx[0])) {cout << "result is nan!" << endl;break;}if (iter > 0 && cost >= lastCost) {cout << "cost: " << cost << ">= last cost: " << lastCost << ", break." << endl;break;}ae += dx[0];be += dx[1];ce += dx[2];lastCost = cost;cout << "total cost: " << cost << ", \t\tupdate: " << dx.transpose() <<"\t\testimated params: " << ae << "," << be << "," << ce << endl;}chrono::steady_clock::time_point t2 = chrono::steady_clock::now();chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);cout << "solve time cost = " << time_used.count() << " seconds. " << endl;cout << "estimated abc = " << ae << ", " << be << ", " << ce << endl;return 0;
}CMakeLists.txt:
cmake_minimum_required(VERSION 2.8)
project(homework4)
set(CMAKE_BUILD_TYPE Release)
set(CMAKE_CXX_FLAGS "-std=c++14 -O3")
list(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
# OpenCV
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# Eigen
include_directories("/usr/include/eigen3")add_executable(homework4 gaussnewton.cpp)
target_link_libraries(homework4 ${OpenCV_LIBS})然后老五套
mkdir build
cd build
cmake …
make
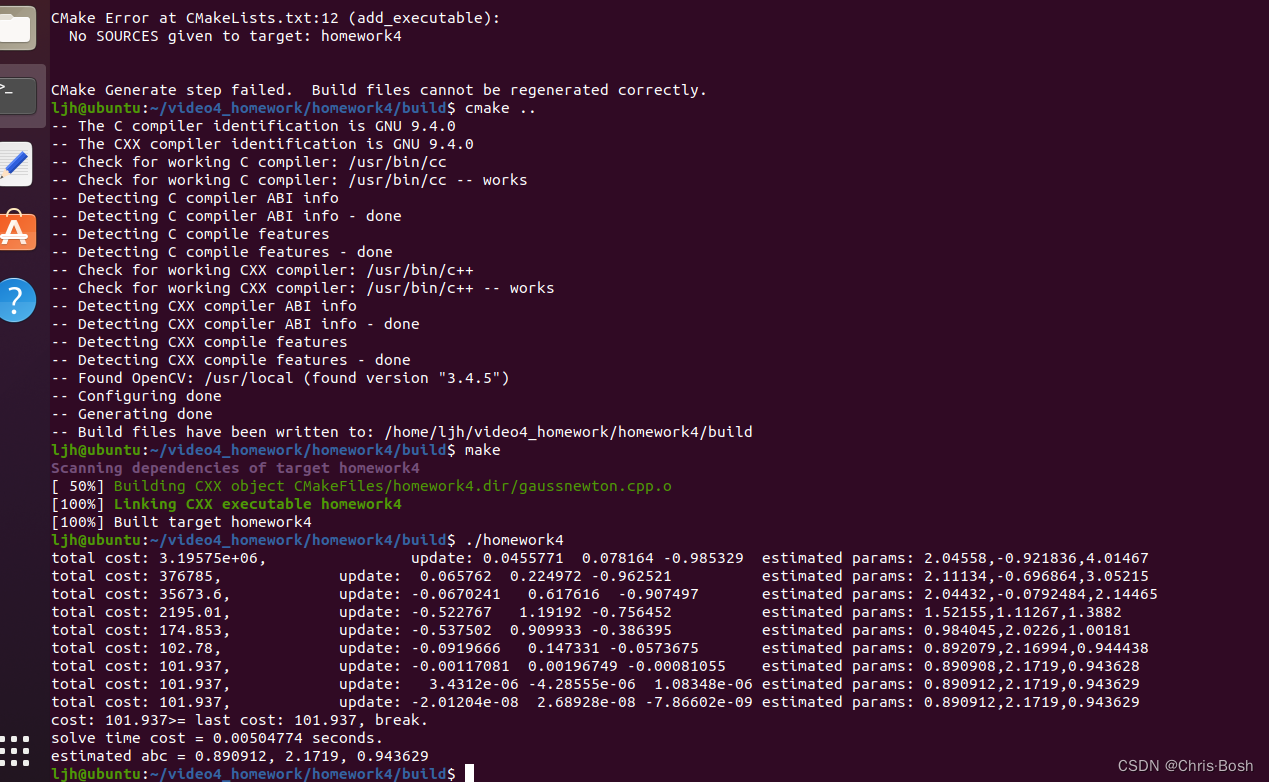
./homework4

相关文章:
自学SLAM(8)《第四讲:相机模型与非线性优化》作业
前言 小编研究生的研究方向是视觉SLAM,目前在自学,本篇文章为初学高翔老师课的第四次作业。 文章目录 前言1.图像去畸变2.双目视差的使用3.矩阵微分4.高斯牛顿法的曲线拟合实验 1.图像去畸变 现实⽣活中的图像总存在畸变。原则上来说,针孔透…...
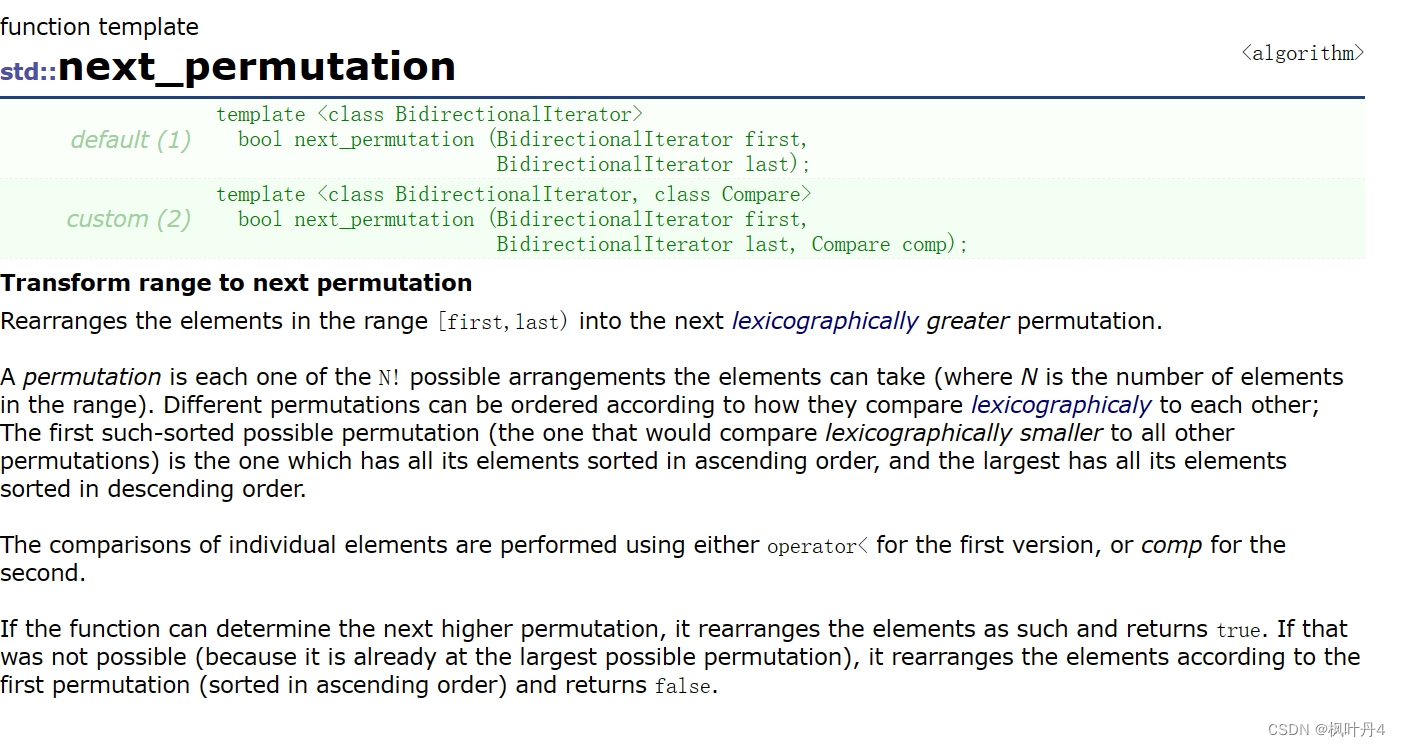
STL—next_permutation函数
目录 1.next_permutation函数的定义 2.简单使用 2.1普通数组全排列 2.2结构体全排列 2.3string 3.补充 1.next_permutation函数的定义 next_permutation函数会按照字母表顺序生成给定序列的下一个较大的排列,直到整个序列为降序为止。与其相对的还有一个函数—…...

Mysql 三种不使用索引的情况
目录 1. 查询语句中使用LIKE关键字 例 1 2. 查询语句中使用多列索引 例 2 3. 查询语句中使用OR关键字 例 3 总结 索引可以提高查询的速度,但并不是使用带有索引的字段查询时,索引都会起作用。使用索引有几种特殊情况,在这些情况下&…...

Ladybug 全景相机, 360°球形成像,带来全方位的视觉体验
360无死角全景照片总能给人带来强烈的视觉震撼,有着大片的既视感。那怎么才能拍出360球形照片呢?它的拍摄原理是通过图片某个点位为中心将图片其他部位螺旋式、旋转式处理,从而达到沉浸式体验的效果。俗话说“工欲善其事,必先利其…...

centos 6.10 安装swig 4.0.2
下载地址 解压文件。 执行下面命令 cd swig-4.0.2 ./configure --prefix/usr/local/swig-4.0.2 make && make install...

mask: rle, polygon
RLE 编码 RLE(Run-Length Encoding)是一种简单而有效的无损数据压缩和编码方法。它的基本思想是将连续相同的数据值序列用一个值和其连续出现的次数来表示,从而减少数据的存储或传输量。 在图像分割领域(如 COCO 数据集中&#…...

【JMeter】JMeter压测过程中遇到Non HTTP response code错误解决方案
压测过程中并发逐步加大后遇到60%的错误率,查看错误是JMeter网页版聚合报告中显示 Non HTTP response code: java.net.NoRouteToHostException/Non HTTP response message: Cannot assign requested address (Address not available) 这是第二次遇到,故…...

【Kingbase FlySync】评估工具安装及使用
【Kingbase FlySync】评估工具使用 概述准备环境目标资源1.测试虚拟机下载地址包含node1,node22.评估工具下载地址3.exam.sql下载地址 评估工具安装1.上传并解压评估工具安装包2.安装数据库驱动包3.设置环境变量4.node1载入样例信息 收集并阅读node1信息1.收集报告2.阅读报告 收…...

pandas教程:Data Aggregation 数据聚合
文章目录 10.2 Data Aggregation(数据聚合)1 Column-Wise and Multiple Function Application(列对列和多函数应用)2 Returning Aggregated Data Without Row Indexes(不使用行索引返回聚合数据) 10.2 Data…...
开启创造力之门:掌握Vue中Slot插槽的使用技巧与灵感
🎬 江城开朗的豌豆:个人主页 🔥 个人专栏 :《 VUE 》 《 javaScript 》 📝 个人网站 :《 江城开朗的豌豆🫛 》 ⛺️ 生活的理想,就是为了理想的生活 ! 目录 ⭐ 专栏简介 📘 文章引言 一、s…...

【算法练习Day48】回文子串最长回文子序列
📝个人主页:Sherry的成长之路 🏠学习社区:Sherry的成长之路(个人社区) 📖专栏链接:练题 🎯长路漫漫浩浩,万事皆有期待 文章目录 回文子串最长回文子序列总结…...
ubuntu下C++调用matplotlibcpp进行画图(超详细)
目录 一、换源 二、安装必要的软件 三、下载matplotlibcpp 四、下载anaconda 1.anaconda下载 2.使用anaconda配置环境 五、下载CLion 1.下载解压CLion 2.替换jbr文件夹 3.安装CLion 4.激活CLion 5.CLion汉化 6.Clion配置 六、使用CLion运行 七、总结 我的环…...
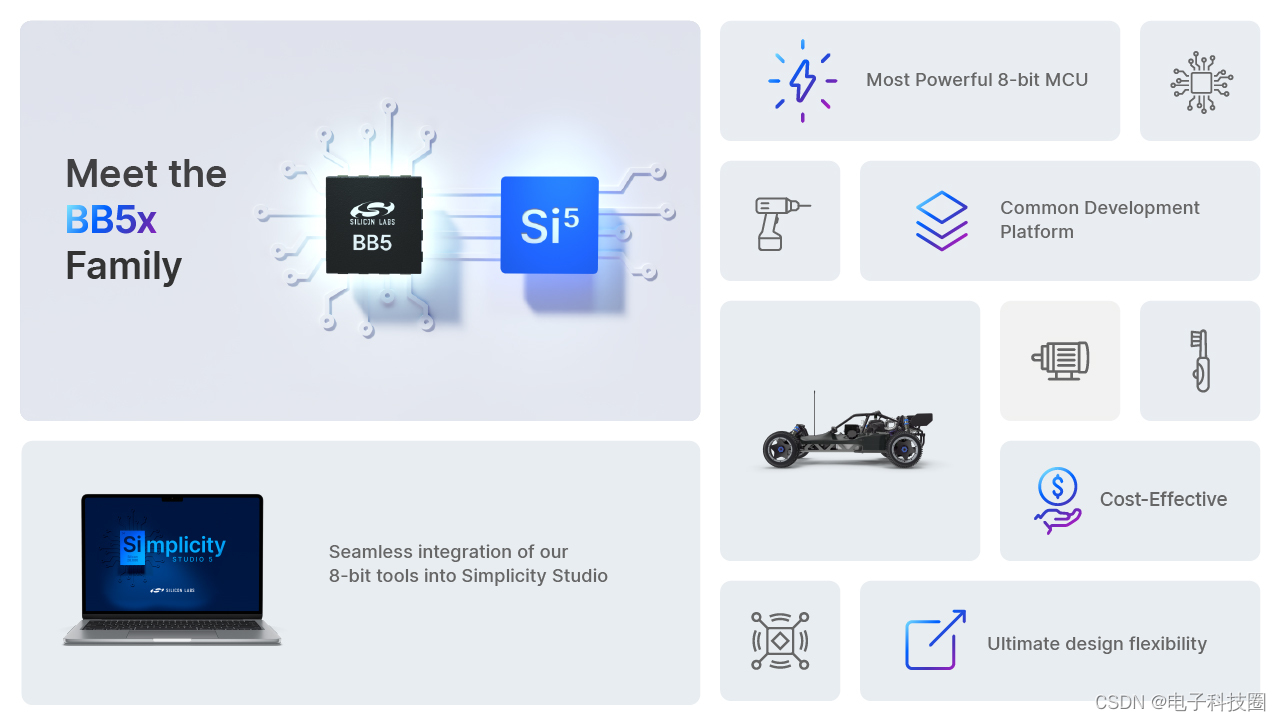
芯科科技推出新的8位MCU系列产品,扩展其强大的MCU平台
新的BB5系列为简单应用提供更多开发选择 中国,北京 - 2023年11月14日 – 致力于以安全、智能无线连接技术,建立更互联世界的全球领导厂商Silicon Labs(亦称“芯科科技”,NASDAQ:SLAB),今日宣布…...

Flink CDC
1、Flink CDC的介绍: 是一种技术,可以帮助我们实时的捕获数据库中数据的变化,并将这些变化的数据以流的形式传输到其他的系统中进行处理和存储。 2、Flink CDC的搭建: 1、开启mysql的binlog功能: # 1、修改mysql配置…...

数据结构-链表的简单操作代码实现3-LinkedList【Java版】
写在前: 本篇博客主要介绍关于双向链表的一些简答操作实现,其中有有部分代码的实现和前两篇博客中的单向链表是相类似的。例如:查找链表中是否包含关键字key、求链表的长度等。 其余的涉及到prev指向的需要特别注意,区分和单向链表之间的差异…...

JTS: 24 MinimumDiameter 最小矩形
文章目录 版本代码 版本 org.locationtech.jts:jts-core:1.19.0 链接: github 代码 package pers.stu.algorithm;import org.locationtech.jts.algorithm.MinimumDiameter; import org.locationtech.jts.geom.Coordinate; import org.locationtech.jts.geom.Geometry; import…...
MacOS Ventura 13 优化配置(ARM架构新手向导)
一、系统配置 1、About My MacBook Pro 2、在当前标签打开新窗口 桌面上创建目录的文件夹,每次新打开一个目录,就会创建一个窗口,这就造成窗口太多,不太好查看和管理,我们可以改成在新标签处打开新目录。需要在&…...
多区域OSPF配置
配置命令步骤: 1.使用router ospf 进程ID编号 启用OSPF路由 2.使用network 直连网络地址 反掩码 area 区域号 将其归于对应区域 注意: 1.进程ID编号可任意(1-65535) 2.反掩码用4个255相减得到 3.area 0 为主干区域 4.连接不…...

【强化学习】day1 强化学习基础、马尔可夫决策过程、表格型方法
写在最前:参加DataWhale十一月组队学习记录 【教程地址】 https://github.com/datawhalechina/joyrl-book https://datawhalechina.github.io/easy-rl/ https://linklearner.com/learn/detail/91 强化学习 强化学习是一种重要的机器学习方法,它使得智能…...

openwrt Docker不能联网
文章参考:docker上网(docker安装openwrt无法上网) - 老白网络 外网不能访问内网是应为防火墙。内网访问外网如下: 清理容器垃圾 docker volume prune -f 创建一个网络 docker network create --subnet172.18.0.0/16 mynet 通过该网络创建gerrit docker run -tid --name ge…...

艾尔登法环帧率解锁终极指南:告别卡顿,畅享丝滑游戏体验
艾尔登法环帧率解锁终极指南:告别卡顿,畅享丝滑游戏体验 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_m…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...
)
第二周(第12周)
1.单电源供电的二阶低通滤波器2.功率放大电路...

荣耀出征官方网站下载正版手游 翅膀养成细节玩法全方位讲解
玩荣耀出征的玩家都清楚,翅膀不仅是角色的颜值象征,更是提升整体战力的核心途径。很多新手玩家只顾着升级、刷装备,完全忽略翅膀养成,导致等级很高但战力始终上不去。还有不少玩家胡乱合成、盲目进阶,浪费了大量稀有翅…...

双稳健机器学习:用正交性与交叉拟合解决因果推断中的ML偏差
1. 项目概述:当机器学习遇见因果推断的“干扰”难题在实证研究的日常工作中,我们常常面临一个核心矛盾:我们真正关心的,往往只是一个或几个关键参数——比如一项政策对就业率的平均影响(平均处理效应,ATE&a…...

危急时刻的六条基本安全提示
人机协作,AI模型:Deepseek 仅供参考 危急时刻的六条基本安全提示 以下内容仅为通用性安全建议,供在紧急情况下保持冷静、保护自身安全时参考。所有建议均基于常理和公共安全常识,不包含任何具体操作细节或可能被不当使用的信息…...

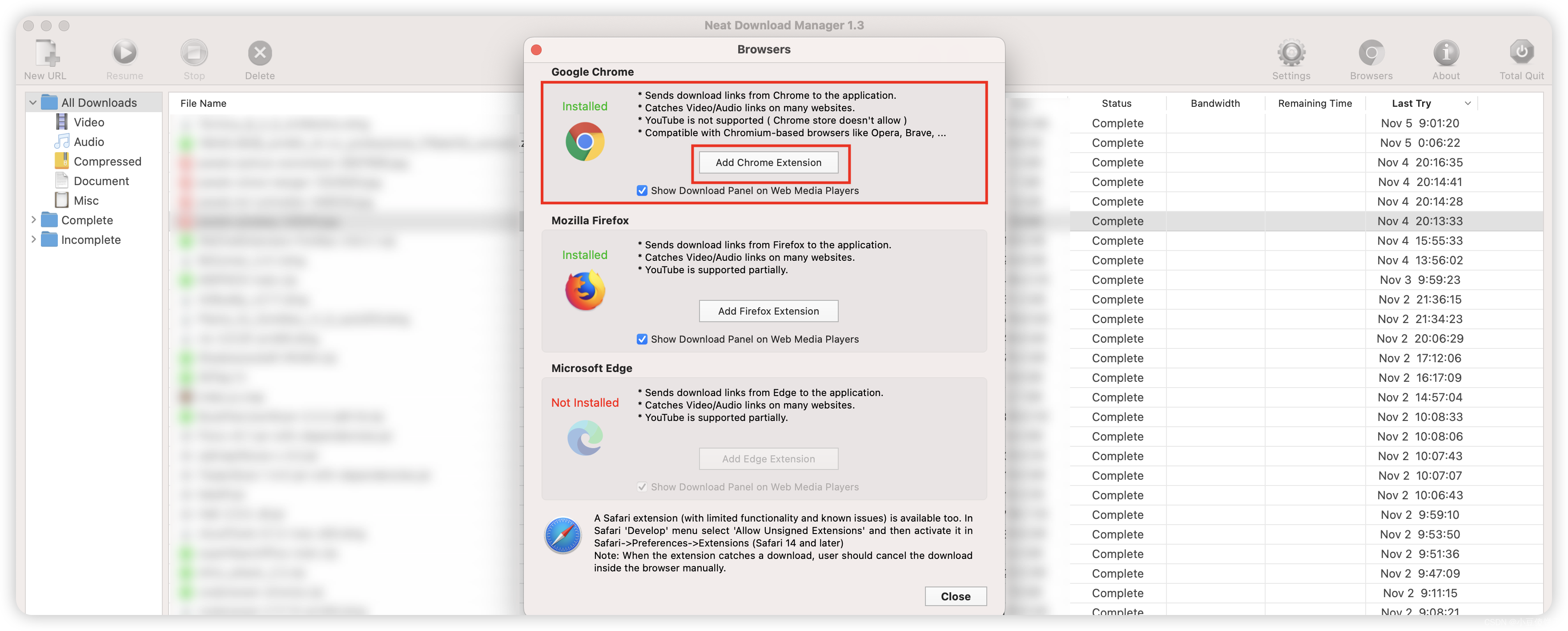
三步让小爱音箱秒变AI语音助手:MiGPT深度配置指南
三步让小爱音箱秒变AI语音助手:MiGPT深度配置指南 【免费下载链接】mi-gpt 🏠 将小爱音箱接入 ChatGPT 和豆包,改造成你的专属语音助手。 项目地址: https://gitcode.com/GitHub_Trending/mi/mi-gpt 还在为小爱音箱的"人工智障&q…...

实战解锁:在Blender中掌握专业级MMD动画制作全流程
实战解锁:在Blender中掌握专业级MMD动画制作全流程 【免费下载链接】blender_mmd_tools MMD Tools is a blender addon for importing/exporting Models and Motions of MikuMikuDance. 项目地址: https://gitcode.com/gh_mirrors/bl/blender_mmd_tools MMD …...

Unity中实现深度遮挡:LingBot-Depth实战接入与优化
1. 这不是“加个插件就完事”的AR效果——为什么LingBot-Depth在Unity里值得专门写一篇实战教程你肯定见过那种AR应用:虚拟椅子摆在真实地板上,但当你绕到椅子后面,它依然完整显示,完全无视身后那堵真实的墙;或者一只3…...

机器学习在宇宙中微子快味转换检测中的实践:从逻辑回归到天体物理模拟集成
1. 项目概述:当机器学习遇见宇宙深处的“幽灵粒子” 在宇宙最狂暴的舞台——核心坍缩超新星(CCSN)和双中子星并合(NSM)事件的中心,上演着一场肉眼无法观测的微观物理盛宴。这里的主角是中微子,这…...