相机通用类之LMI激光三角相机(3D),软触发硬触发(飞拍),并输出halcon格式对象
//在此之前可以先浏览我编写的通用上位机类,更方便理解
https://blog.csdn.net/m0_51559565/article/details/134403745
最近完成一个关于LMI激光三角(3D相机)采图的demo,记录并说明用法。
先上代码。
using Lmi3d.GoSdk;
using Lmi3d.Zen;
using System;
using System.Collections.Generic;
using HalconDotNet;
using Lmi3d.GoSdk.Messages;
using System.Runtime.InteropServices;
using System.IO;
using WeldingInspection.MyCamer;namespace WeldingInspection
{internal class LMISDK: MyBaseCamera{GoSensor MyLMICamer = null;//创建LMI相机传感器对象GoSystem goSystem = new GoSystem();//创建LMI系统信息List<string> LMICamerName = new List<string>();//获取相机序列号HObject Himage3D=new HObject();public LMISDK(){//KApiLib.Construct();激活API库//GoSdkLib.Construct();}/// <summary>/// 查找相机,并输出序列号/// </summary>/// <returns></returns>public override List<string> FindCamer(){long size = goSystem.SensorCount;for (int i = 0; i < size; i++){GoAddressInfo addressInfo = goSystem.GetSensor(i).Address();LMICamerName.Add(goSystem.GetSensor(i).Id.ToString());}foreach (var item in LMICamerName){Console.WriteLine("当前连接相机有:" + item);}return LMICamerName;}/// <summary>/// 根据序列号开启相机/// </summary>/// <param name="CamerName"></param>/// <returns></returns>public override bool OpenCamer(string CamerName){uint LMIName;if (!uint.TryParse(CamerName,out LMIName)){return false;}if (LMICamerName.Count == 0 && MyLMICamer == null){return false;}//关闭设备CloseCamer();//通过ID找到Gocator SensorMyLMICamer = new GoSystem().FindSensorById(LMIName);MyLMICamer.Connect();//连接成功if (MyLMICamer.IsConnected()){MyLMICamer.EnableData(true);//开启允许相机采集//MyLMICamer.SetDataHandler(onData);//注册回调函数,生成未标定的16位深度图//MyLMICamer.SetDataHandler(onData_GenTL);//注册回调函数获得GenTL图MyLMICamer.SetDataHandler(onData_Calib);//注册回调函数,生成具有标定数据的,16位深度图}else{Console.WriteLine("开启LMI相机失败");MyLMICamer = null;return false;}return true;}/// <summary>/// 关闭相机/// </summary>/// <returns></returns>public override bool CloseCamer(){try{if (MyLMICamer != null){//停止采集MyLMICamer.Stop();return true;}return false;}catch (Exception ex){Console.WriteLine("相机停止采集异常", ex);return false;}}/// <summary>/// 相机重连/// </summary>/// <param name="CamerName"></param>/// <returns></returns>public override bool ReconnectCamer(string CamerName){uint LMIName;if (!uint.TryParse(CamerName, out LMIName)){return false;}if (LMICamerName.Count == 0 && MyLMICamer == null){return false;}//关闭设备CloseCamer();//通过ID找到Gocator SensorMyLMICamer = new GoSystem().FindSensorById(LMIName);MyLMICamer.Connect();//连接成功if (MyLMICamer.IsConnected()){MyLMICamer.EnableData(true);//开启允许相机采集//MyLMICamer.SetDataHandler(onData);//注册回调函数,生成未标定的16位深度图//MyLMICamer.SetDataHandler(onData_GenTL);//注册回调函数获得GenTL图,可以用于表面缺陷检测MyLMICamer.SetDataHandler(onData_Calib);//注册回调函数,生成具有标定数据的,16位深度图}else{Console.WriteLine("开启LMI相机失败");MyLMICamer = null;return false;}return true;}/// <summary>/// 软触发一次/// </summary>/// <returns></returns>public override bool OneGrap(){try{if (MyLMICamer.State == GoState.Running){MyLMICamer.Stop();MyLMICamer.Start();}else{MyLMICamer.Start();}return true;}catch (Exception){return false;}}/// <summary>/// 设置硬触发/// </summary>/// <returns></returns>public override bool EncoderGrap(){MyLMICamer.Setup.TriggerSource = GoTrigger.Encoder;MyLMICamer.Flush();return true;}/// <summary>/// 将配置文件上传到相机中/// </summary>/// <param name="Address">文件所在绝对路径</param>/// <param name="FileName">文件名称</param>/// <returns></returns>public bool UpLoad_Camer_file(string Address,string FileName){try{MyLMICamer.Stop();MyLMICamer.UploadFile(Address, FileName);MyLMICamer.Flush();return true;}catch (Exception){return false;}}/// <summary>/// 输出高度信息以毫米(mm)为单位,带标定结果/// </summary>/// <param name="data"></param>public void onData_Calib(KObject data){//x图HObject GenTL16BitRGBRedImage = new HObject();//y图HObject GenTL16BitRGBGreenImage = new HObject();//z图HObject GenTL16BitRGBBlueImage = new HObject();try{GoDataSet dataSet = (GoDataSet)data;for (uint i = 0; i < dataSet.Count; i++){GoDataMsg dataObj = (GoDataMsg)dataSet.Get(i);switch (dataObj.MessageType){case GoDataMessageType.UniformSurface:{GoUniformSurfaceMsg surfaceMsg = (GoUniformSurfaceMsg)dataObj;//获取缓存的宽高surfaceBufferWidth = surfaceMsg.Width;surfaceBufferLength = surfaceMsg.Length;double xResolution = (double)surfaceMsg.XResolution / 1000000;double yResolution = (double)surfaceMsg.YResolution / 1000000;double zResolution = (double)surfaceMsg.ZResolution / 1000000;Console.WriteLine("3d标定数据:X方向:"+xResolution+"Y方向:"+yResolution);//double xOffset = (double)surfaceMsg.XOffset / 1000;//double yOffset = (double)surfaceMsg.YOffset / 1000;double zOffset = (double)surfaceMsg.ZOffset / 1000;IntPtr bufferPointeri = surfaceMsg.Data;//short[] x = new short[surfaceBufferLength * surfaceBufferWidth];//short[] y = new short[surfaceBufferLength * surfaceBufferWidth];short[] z = new short[surfaceBufferLength * surfaceBufferWidth];//声明存放surface的Buffer//short[] surfaceBuffer = new short[surfaceBufferWidth * surfaceBufferLength];//将传感器给的值拷贝到我们声明的数组中Marshal.Copy(bufferPointeri, z, 0, Convert.ToInt32(surfaceBufferWidth * surfaceBufferLength));//for (short row = 0; row < surfaceBufferLength; row++)//{// for (short col = 0; col < surfaceMsg.Width; col++)// {// x[row * surfaceMsg.Width + col] = col;// y[row * surfaceMsg.Width + col] = row;// }//}//将传感器数据存储至生命的内存空间中// Marshal.Copy(bufferPointeri, surfaceBuffer, 0, surfaceBuffer.Length);unsafe{fixed (short* p = z)HOperatorSet.GenImage1(out GenTL16BitRGBBlueImage, "int2", surfaceBufferWidth, surfaceBufferLength, new IntPtr(p));//fixed (short* p = x)// HOperatorSet.GenImage1(out GenTL16BitRGBRedImage, "int2", surfaceBufferWidth, surfaceBufferLength, new IntPtr(p));//fixed (short* p = y)// HOperatorSet.GenImage1(out GenTL16BitRGBGreenImage, "int2", surfaceBufferWidth, surfaceBufferLength, new IntPtr(p));}//以下注释部分可生成三通道图像//HOperatorSet.ConvertImageType(GenTL16BitRGBRedImage, out GenTL16BitRGBRedImage, "real");//HOperatorSet.ScaleImage(GenTL16BitRGBRedImage, out GenTL16BitRGBRedImage, xResolution, xOffset);//HOperatorSet.WriteImage(GenTL16BitRGBRedImage, new HTuple("tiff"), new HTuple(0), "E:\\UpperComputer\\LMI\\LMIHalconImage\\x.tiff");//HOperatorSet.ConvertImageType(GenTL16BitRGBGreenImage, out GenTL16BitRGBGreenImage, "real");//HOperatorSet.ScaleImage(GenTL16BitRGBGreenImage, out GenTL16BitRGBGreenImage, yResolution, yOffset);//HOperatorSet.ScaleImage(GenTL16BitRGBGreenImage, out GenTL16BitRGBGreenImage, -1, 0);//HOperatorSet.WriteImage(GenTL16BitRGBGreenImage, new HTuple("tiff"), new HTuple(0), "E:\\UpperComputer\\LMI\\LMIHalconImage\\y.tiff");HOperatorSet.ConvertImageType(GenTL16BitRGBBlueImage, out GenTL16BitRGBBlueImage, "real");HOperatorSet.ScaleImage(GenTL16BitRGBBlueImage, out Himage3D, zResolution, zOffset);//映射标定数据//HOperatorSet.WriteImage(Himage3D, new HTuple("tiff"), new HTuple(0), "E:\\UpperComputer\\LMI\\LMIHalconImage\\z.tiff");//HOperatorSet.Compose3(GenTL16BitRGBRedImage, GenTL16BitRGBGreenImage, GenTL16BitRGBBlueImage,out HObject Halcon3DImage);//HOperatorSet.WriteImage(Halcon3DImage, new HTuple("tiff"), new HTuple(0), "E:\\UpperComputer\\LMI\\LMIHalconImage\\3d.tiff");GetImage(Himage3D);}break;}}//生成3d模型//HOperatorSet.XyzToObjectModel3d(GenTL16BitRGBRedImage, GenTL16BitRGBGreenImage, GenTL16BitRGBBlueImage, out hv_ObjectModel3D);//HOperatorSet.WriteObjectModel3d(hv_ObjectModel3D, "ply", "E:\\UpperComputer\\LMI\\LMIHalconImage\\xyz.ply", new HTuple(), new HTuple());GenTL16BitRGBRedImage.Dispose();GenTL16BitRGBRedImage = null;GenTL16BitRGBGreenImage.Dispose();GenTL16BitRGBGreenImage = null;GenTL16BitRGBBlueImage.Dispose();GenTL16BitRGBBlueImage = null;MyLMICamer.Stop();}catch{GenTL16BitRGBRedImage.Dispose();GenTL16BitRGBRedImage = null;GenTL16BitRGBGreenImage.Dispose();GenTL16BitRGBGreenImage = null;GenTL16BitRGBBlueImage.Dispose();GenTL16BitRGBBlueImage = null;MyLMICamer.Stop();}Console.WriteLine(Environment.NewLine);}/// <summary>/// 设置曝光时间/// </summary>/// <param name="ExposureTime"></param>/// <returns></returns>public override bool SetExposureTime(int ExposureTime){try{if (MyLMICamer.State == GoState.Running){MyLMICamer.Stop();}MyLMICamer.Setup.SetExposure(MyLMICamer.Role, ExposureTime);MyLMICamer.Flush();return true;}catch (Exception){return false;}}#region // 生成不带标定数据的高度信息图/// <summary>/// 输出高度信息以纳米为单位。需要乘以分辨率/// </summary>/// <param name="data"></param>public void onData(KObject data){//高度图HObject GenTL16BitRGBRedImage = new HObject();//亮度图HObject GenTL16BitRGBGreenImage = new HObject();try{if (!Directory.Exists("E:\\UpperComputer")){Directory.CreateDirectory("E:\\UpperComputer");}GoDataSet dataSet = (GoDataSet)data;for (uint i = 0; i < dataSet.Count; i++){GoDataMsg dataObj = (GoDataMsg)dataSet.Get(i);Console.WriteLine(dataObj.MessageType);switch (dataObj.MessageType){case GoDataMessageType.UniformSurface:{GoUniformSurfaceMsg surfaceMsg = (GoUniformSurfaceMsg)dataObj;IntPtr bufferPointeri = surfaceMsg.Data;//声明存放surface的Buffershort[] surfaceBuffer = new short[surfaceMsg.Width * surfaceMsg.Length];//将传感器数据存储至生命的内存空间中Marshal.Copy(bufferPointeri, surfaceBuffer, 0, surfaceBuffer.Length);unsafe{fixed (short* p = surfaceBuffer)HOperatorSet.GenImage1(out GenTL16BitRGBRedImage, "int2", surfaceMsg.Width, surfaceMsg.Length, new IntPtr(p));}HOperatorSet.WriteImage(GenTL16BitRGBRedImage, "tiff", 0, "E:\\UpperComputer\\" + "height" + DateTime.Now.ToString("yyyymmdd-hhmmssfff") + ".tif");}break;case GoDataMessageType.SurfaceIntensity:{GoSurfaceIntensityMsg surfaceIntensityMsg = (GoSurfaceIntensityMsg)dataObj;IntPtr bufferPointeri = surfaceIntensityMsg.Data;//声明存放surface的Bufferbyte[] surfaceBuffer = new byte[surfaceIntensityMsg.Width * surfaceIntensityMsg.Length];//将传感器数据存储至声明的内存空间中Marshal.Copy(bufferPointeri, surfaceBuffer, 0, surfaceBuffer.Length);GenTL16BitRGBGreenImage.Dispose();unsafe{fixed (byte* p = surfaceBuffer){HOperatorSet.GenImage1(out GenTL16BitRGBGreenImage, "byte", surfaceIntensityMsg.Width, surfaceIntensityMsg.Length, new IntPtr(p));}}HOperatorSet.WriteImage(GenTL16BitRGBGreenImage, "tiff", 0, "E:\\UpperComputer\\" + "Intensity" + DateTime.Now.ToString("yyyymmdd-hhmmssfff") + ".tif");}break;}}//GenTL16BitRGBRedImage = null;//GenTL16BitRGBGreenImage = null;GenTL16BitRGBGreenImage.Dispose();GenTL16BitRGBRedImage.Dispose();MyLMICamer.Stop();}catch{//MyLMICamer.Stop();GenTL16BitRGBRedImage.Dispose();//GenTL16BitRGBRedImage = null;GenTL16BitRGBGreenImage.Dispose();//GenTL16BitRGBGreenImage = null;}Console.WriteLine(Environment.NewLine);}#endregion#region // 生成GenTL彩色图格式,并转化为halcon模型/// <summary>/// 输入genTL格式高度图,转化为3d模型。genTL为彩色高度图像/// </summary>/// <param name="ho_Gentl"></param>/// <param name="Save3D"></param>/// <param name="SaveAddress"></param>/// <returns></returns>public HTuple Himage_To_3D(HObject ho_Gentl, bool Save3D, string SaveAddress){HTuple hv_ObjectModel3D = new HTuple();hv_ObjectModel3D.Dispose();Gentl_to_object_model_3d(ho_Gentl, out hv_ObjectModel3D, Save3D, SaveAddress);return hv_ObjectModel3D;}static long frameCount = 0, timeStamp = 0, encoderValue = 0, encoderIndex = 0, digitalStates = 0;static long surfaceBufferWidth = 0, surfaceBufferLength = 0;static long surfaceXResolution = 0, surfaceYResolution = 0, surfaceZResolution = 0;static long surfaceXOffset = 0, surfaceYOffset = 0, surfaceZOffset = 0;static long intensityEnable = 0;/// <summary>/// 回调函数,输出GenTL格式彩色深度图/// </summary>/// <param name="data"></param>public void onData_GenTL(KObject data){//高度图HObject GenTL16BitRGBRedImage = new HObject();//亮度图HObject GenTL16BitRGBGreenImage = new HObject();//Stamp图HObject GenTL16BitRGBBlueImage = new HObject();//GenTLImageHObject GenTLImage = new HObject();try{GoDataSet dataSet = (GoDataSet)data;for (uint i = 0; i < dataSet.Count; i++){GoDataMsg dataObj = (GoDataMsg)dataSet.Get(i);switch (dataObj.MessageType){case GoDataMessageType.Stamp:{GoStampMsg stampMsg = (GoStampMsg)dataObj;for (int j = 0; j < stampMsg.Count; j++){//获取缓存的宽高GoStamp goStamp = stampMsg.Get(j);frameCount = (long)goStamp.FrameIndex;timeStamp = (long)goStamp.Timestamp;encoderValue = goStamp.Encoder;encoderIndex = goStamp.EncoderAtZ;digitalStates = (long)goStamp.Status;}}break;case GoDataMessageType.UniformSurface:{GoUniformSurfaceMsg surfaceMsg = (GoUniformSurfaceMsg)dataObj;//获取缓存的宽高surfaceBufferWidth = surfaceMsg.Width;surfaceBufferLength = surfaceMsg.Length;//获取缓存的分辨率 nmsurfaceXResolution = surfaceMsg.XResolution;surfaceYResolution = surfaceMsg.YResolution;surfaceZResolution = surfaceMsg.ZResolution;#region Offset (um) 转换为 NM *1000surfaceXOffset = surfaceMsg.XOffset * 1000;surfaceYOffset = surfaceMsg.YOffset * 1000;//注意由于halcon体系中用GenTL采集图像默认使用uint2来存储高度数据//而Gocator体系中采集的图像默认使用int2来存储高度数据//所以从Gocator SDK读出的zOffset 适用于Gocator SDK采集的“int2”类型的数据//而我们由于在算法开发过程中使用halcon GenTL采集数据,并且配置了众多处理参数,从而导出的算法代码中的参数//通常都是基于uint2类型数据的,这里我们将Gocator SDK读出的 zOffset做一个转换,使其适配于halcon的uint2体系surfaceZOffset = (long)((surfaceMsg.ZOffset +(short.MinValue * (surfaceMsg.ZResolution * 1e-3))) * 1000);#endregionIntPtr bufferPointeri = surfaceMsg.Data;//声明存放surface的Buffershort[] surfaceBuffer = new short[surfaceBufferWidth * surfaceBufferLength];//将传感器数据存储至生命的内存空间中Marshal.Copy(bufferPointeri, surfaceBuffer, 0, surfaceBuffer.Length);unsafe{fixed (short* p = surfaceBuffer)HOperatorSet.GenImage1(out GenTL16BitRGBRedImage, "int2", surfaceBufferWidth, surfaceBufferLength, new IntPtr(p));}HOperatorSet.ConvertImageType(GenTL16BitRGBRedImage, out GenTL16BitRGBRedImage, "real");HOperatorSet.ScaleImage(GenTL16BitRGBRedImage, out GenTL16BitRGBRedImage, 1, 32768);HOperatorSet.ConvertImageType(GenTL16BitRGBRedImage, out GenTL16BitRGBRedImage, "uint2");}break;case GoDataMessageType.SurfaceIntensity:{GoSurfaceIntensityMsg surfaceIntensityMsg = (GoSurfaceIntensityMsg)dataObj;IntPtr bufferPointeri = surfaceIntensityMsg.Data;//声明存放surface的Bufferbyte[] surfaceBuffer = new byte[surfaceBufferWidth * surfaceBufferLength];//将传感器数据存储至声明的内存空间中Marshal.Copy(bufferPointeri, surfaceBuffer, 0, surfaceBuffer.Length);intensityEnable = 1;GenTL16BitRGBGreenImage.Dispose();unsafe{fixed (byte* p = surfaceBuffer){HOperatorSet.GenImage1(out GenTL16BitRGBGreenImage, "byte", surfaceBufferWidth, surfaceBufferLength, new IntPtr(p));}}#region 将byte图像转换为uint2图像//如果严格按照GenTL协议组织数据的话应该将GenTL16BitRGBGreenImage(Intensity)转换成Uint2类型,转换代码如下//但是由于在运行时软件中显示亮度图时,很多显示器无法很好的支持16bit亮度图的显示,会出现显示细节丢失的情况,从而显示效果很差,//索性这里保留GenTL16BitRGBGreenImage的Byte类型//注意下面的代码为halcon中的流程在VS中实现需要一些中间HObje来保存每一步处理生成的图像,建议在halcon中编写写明的过程,然后导出为C#代码,参考导出代码编写//HOperatorSet.ConvertImageType(GenTL16BitRGBGreenImage, out GenTL16BitRGBGreenImage, "uint2");//HOperatorSet.ScaleImage(GenTL16BitRGBGreenImage, out GenTL16BitRGBGreenImage, 256, 0);#endregion}break;}}//生成BlueImageGenTL16BitRGBBlueImage.Dispose();GenGenTL16BitRGBBlueImage(frameCount, timeStamp, encoderValue, encoderIndex, digitalStates,surfaceBufferWidth, surfaceBufferLength, surfaceXOffset, surfaceXResolution, surfaceYOffset, surfaceYResolution,surfaceZOffset, surfaceZResolution, intensityEnable, out GenTL16BitRGBBlueImage);//将 高度图 亮度图 Stamp图组合成GenTL图像HOperatorSet.Compose3(GenTL16BitRGBRedImage, GenTL16BitRGBGreenImage, GenTL16BitRGBBlueImage, out GenTLImage);HOperatorSet.WriteImage(GenTLImage, new HTuple("tiff"), new HTuple(0), new HTuple("E:\\UpperComputer\\LMI\\LMIHalconImage\\" + frameCount.ToString()));Himage_To_3D(GenTLImage, true, "E:\\UpperComputer\\LMI\\LMIHalconImage\\2");GenTL16BitRGBRedImage = null;GenTL16BitRGBGreenImage = null;GenTL16BitRGBBlueImage = null;GenTLImage = null;MyLMICamer.Stop();Console.WriteLine("采集结束");}catch{GenTL16BitRGBRedImage.Dispose();GenTL16BitRGBRedImage = null;GenTL16BitRGBGreenImage.Dispose();GenTL16BitRGBGreenImage = null;GenTL16BitRGBBlueImage.Dispose();GenTL16BitRGBBlueImage = null;GenTLImage.Dispose();GenTLImage = null;MyLMICamer.Stop();}Console.WriteLine(Environment.NewLine);}public static void Gentl_to_object_model_3d(HObject ho_Gentl, out HTuple hv_ObjectModel3D, bool Save3D, string SaveAddress){// Local iconic variables HObject ho_HeightMap, ho_Intensity, ho_ImageOpening;HObject ho_Regions, ho_ImageReduced, ho_ImageConverted;HObject ho_HeightMapMM, ho_ImageSurface, ho_ImageSurface1;HObject ho_X, ho_Y, ho_MultiChannelImage;// Local control variables HTuple hv_frameCount = null, hv_timestamp = null;HTuple hv_encoderPosition = null, hv_encoderIndex = null;HTuple hv_inputs = null, hv_xOffset = null, hv_xResolution = null;HTuple hv_yOffset = null, hv_yResolution = null, hv_zOffset = null;HTuple hv_zResolution = null, hv_width = null, hv_height = null;HTuple hv_HasIntensity = null, hv_Width = null, hv_Height = null;// Initialize local and output iconic variables HOperatorSet.GenEmptyObj(out ho_HeightMap);HOperatorSet.GenEmptyObj(out ho_Intensity);HOperatorSet.GenEmptyObj(out ho_ImageOpening);HOperatorSet.GenEmptyObj(out ho_Regions);HOperatorSet.GenEmptyObj(out ho_ImageReduced);HOperatorSet.GenEmptyObj(out ho_ImageConverted);HOperatorSet.GenEmptyObj(out ho_HeightMapMM);HOperatorSet.GenEmptyObj(out ho_ImageSurface);HOperatorSet.GenEmptyObj(out ho_ImageSurface1);HOperatorSet.GenEmptyObj(out ho_X);HOperatorSet.GenEmptyObj(out ho_Y);HOperatorSet.GenEmptyObj(out ho_MultiChannelImage);ho_HeightMap.Dispose(); ho_Intensity.Dispose();Go2GenTL_ParseData(ho_Gentl, out ho_HeightMap, out ho_Intensity, out hv_frameCount,out hv_timestamp, out hv_encoderPosition, out hv_encoderIndex, out hv_inputs,out hv_xOffset, out hv_xResolution, out hv_yOffset, out hv_yResolution, out hv_zOffset,out hv_zResolution, out hv_width, out hv_height, out hv_HasIntensity);if (HDevWindowStack.IsOpen()){HOperatorSet.DispObj(ho_HeightMap, HDevWindowStack.GetActive());}ho_ImageOpening.Dispose();HOperatorSet.GrayOpeningShape(ho_HeightMap, out ho_ImageOpening, 7, 7, "octagon");ho_Regions.Dispose();HOperatorSet.Threshold(ho_ImageOpening, out ho_Regions, 1, 65535);ho_ImageReduced.Dispose();HOperatorSet.ReduceDomain(ho_ImageOpening, ho_Regions, out ho_ImageReduced);ho_ImageConverted.Dispose();HOperatorSet.ConvertImageType(ho_ImageReduced, out ho_ImageConverted, "real");ho_HeightMapMM.Dispose();HOperatorSet.ScaleImage(ho_ImageConverted, out ho_HeightMapMM, hv_zResolution,hv_zOffset);HOperatorSet.GetImageSize(ho_Gentl, out hv_Width, out hv_Height);//生成xy坐标的图像映射,乘以分辨率就是xy的相对值ho_ImageSurface.Dispose();HOperatorSet.GenImageSurfaceFirstOrder(out ho_ImageSurface, "real", 1, 0, 0,0, 0, hv_Width, hv_Height);ho_ImageSurface1.Dispose();HOperatorSet.GenImageSurfaceFirstOrder(out ho_ImageSurface1, "real", 0, 1, 0,0, 0, hv_Width, hv_Height);//Create X image with correct scaling (in [m])//scale_image (ImageSurface, X, xResolution * 1e-3, xOffset * 1e-3)//scale_image (ImageSurface1, Y, yResolution * 1e-3, yOffset * 1e-3)ho_X.Dispose();HOperatorSet.GenImageSurfaceFirstOrder(out ho_X, "real", 0, hv_xResolution, hv_xOffset,0, 0, hv_Width, hv_Height);//Create Y image with correct scaling (in [m])ho_Y.Dispose();HOperatorSet.GenImageSurfaceFirstOrder(out ho_Y, "real", -hv_yResolution, 0,-hv_yOffset, 0, 0, hv_Width, hv_Height);//scale_image (Z, Z, zResolution * -1e-6, (StandOff + zOffsetTransform_signed) * 1e-6 - zOffset * 1e-9)ho_MultiChannelImage.Dispose();HOperatorSet.Compose3(ho_X, ho_Y, ho_HeightMapMM, out ho_MultiChannelImage);HOperatorSet.XyzToObjectModel3d(ho_X, ho_Y, ho_HeightMapMM, out hv_ObjectModel3D);if (Save3D){HOperatorSet.WriteObjectModel3d(hv_ObjectModel3D, "ply", SaveAddress,new HTuple(), new HTuple());}}public static void Go2GenTL_ParseData(HObject ho_Image, out HObject ho_HeightMap, out HObject ho_Intensity,out HTuple hv_FrameCount, out HTuple hv_Timestamp, out HTuple hv_EncoderPosition,out HTuple hv_EncoderIndex, out HTuple hv_Inputs, out HTuple hv_xOffset, out HTuple hv_xResolution,out HTuple hv_yOffset, out HTuple hv_yResolution, out HTuple hv_zOffset, out HTuple hv_zResolution,out HTuple hv_Width, out HTuple hv_Length, out HTuple hv_HasIntensity){// Local iconic variables HObject ho_Stamps = null;// Local control variables HTuple hv_channelCount = null, hv_monoImageWidth = new HTuple();HTuple hv_monoImageHeight = new HTuple(), hv_IntensityPosition = new HTuple();// Initialize local and output iconic variables HOperatorSet.GenEmptyObj(out ho_HeightMap);HOperatorSet.GenEmptyObj(out ho_Intensity);HOperatorSet.GenEmptyObj(out ho_Stamps);hv_FrameCount = new HTuple();hv_Timestamp = new HTuple();hv_EncoderPosition = new HTuple();hv_EncoderIndex = new HTuple();hv_Inputs = new HTuple();hv_xOffset = new HTuple();hv_xResolution = new HTuple();hv_yOffset = new HTuple();hv_yResolution = new HTuple();hv_zOffset = new HTuple();hv_zResolution = new HTuple();hv_Width = new HTuple();hv_Length = new HTuple();hv_HasIntensity = new HTuple();HOperatorSet.CountChannels(ho_Image, out hv_channelCount);//if ((int)(new HTuple(hv_channelCount.TupleEqual(1))) != 0){//HOperatorSet.GetImageSize(ho_Image, out hv_monoImageWidth, out hv_monoImageHeight);ho_Stamps.Dispose();HOperatorSet.CropRectangle1(ho_Image, out ho_Stamps, hv_monoImageHeight - 1,0, hv_monoImageHeight - 1, hv_monoImageWidth);//Go2GenTLStamp(ho_Stamps, 1, out hv_FrameCount);Go2GenTLStamp(ho_Stamps, 2, out hv_Timestamp);Go2GenTLStamp(ho_Stamps, 3, out hv_EncoderPosition);Go2GenTLStamp(ho_Stamps, 4, out hv_EncoderIndex);Go2GenTLStamp(ho_Stamps, 5, out hv_Inputs);Go2GenTLStamp(ho_Stamps, 6, out hv_xOffset);Go2GenTLStamp(ho_Stamps, 7, out hv_xResolution);Go2GenTLStamp(ho_Stamps, 8, out hv_yOffset);Go2GenTLStamp(ho_Stamps, 9, out hv_yResolution);Go2GenTLStamp(ho_Stamps, 10, out hv_zOffset);Go2GenTLStamp(ho_Stamps, 11, out hv_zResolution);Go2GenTLStamp(ho_Stamps, 12, out hv_Width);Go2GenTLStamp(ho_Stamps, 13, out hv_Length);Go2GenTLStamp(ho_Stamps, 14, out hv_HasIntensity);//ho_HeightMap.Dispose();HOperatorSet.CropRectangle1(ho_Image, out ho_HeightMap, 0, 0, hv_Length - 1,hv_Width);if ((int)(new HTuple(hv_HasIntensity.TupleEqual(1))) != 0){hv_IntensityPosition = (hv_monoImageHeight - 1) / 2;ho_Intensity.Dispose();HOperatorSet.CropRectangle1(ho_Image, out ho_Intensity, hv_IntensityPosition,0, (hv_IntensityPosition + hv_Length) - 1, hv_Width);}else{ho_Intensity.Dispose();HOperatorSet.GenImageConst(out ho_Intensity, "byte", hv_Width, hv_Length);}//}else if ((int)(new HTuple(hv_channelCount.TupleEqual(3))) != 0){//将三通道图像转换为三个图像ho_HeightMap.Dispose(); ho_Intensity.Dispose(); ho_Stamps.Dispose();HOperatorSet.Decompose3(ho_Image, out ho_HeightMap, out ho_Intensity, out ho_Stamps);//Go2GenTLStamp(ho_Stamps, 1, out hv_FrameCount);Go2GenTLStamp(ho_Stamps, 2, out hv_Timestamp);Go2GenTLStamp(ho_Stamps, 3, out hv_EncoderPosition);Go2GenTLStamp(ho_Stamps, 4, out hv_EncoderIndex);Go2GenTLStamp(ho_Stamps, 5, out hv_Inputs);Go2GenTLStamp(ho_Stamps, 6, out hv_xOffset);Go2GenTLStamp(ho_Stamps, 7, out hv_xResolution);Go2GenTLStamp(ho_Stamps, 8, out hv_yOffset);Go2GenTLStamp(ho_Stamps, 9, out hv_yResolution);Go2GenTLStamp(ho_Stamps, 10, out hv_zOffset);Go2GenTLStamp(ho_Stamps, 11, out hv_zResolution);Go2GenTLStamp(ho_Stamps, 12, out hv_Width);Go2GenTLStamp(ho_Stamps, 13, out hv_Length);Go2GenTLStamp(ho_Stamps, 14, out hv_HasIntensity);}////* Change Offset and resolution back to floating point and described in mmhv_xOffset = hv_xOffset / 1000000.0;hv_yOffset = hv_yOffset / 1000000.0;hv_zOffset = hv_zOffset / 1000000.0;hv_xResolution = hv_xResolution / 1000000.0;hv_yResolution = hv_yResolution / 1000000.0;hv_zResolution = hv_zResolution / 1000000.0;//ho_Stamps.Dispose();return;}public static void Go2GenTLStamp(HObject ho_Stamps, HTuple hv_Index, out HTuple hv_Value){// Local iconic variables // Local control variables HTuple hv_test_value = null, hv_is64bit = new HTuple();HTuple hv_tempvalue0 = null, hv_tempvalue1 = null, hv_tempvalue2 = null;HTuple hv_tempvalue3 = null;// Initialize local and output iconic variables hv_Value = new HTuple();//Check if we are on a 64-bit machinehv_test_value = 0xFFFFFFFF;if ((int)(new HTuple(hv_test_value.TupleGreater(0))) != 0){hv_is64bit = 1;}else{hv_is64bit = 0;}//HOperatorSet.GetGrayval(ho_Stamps, 0, hv_Index * 4, out hv_tempvalue0);HOperatorSet.GetGrayval(ho_Stamps, 0, (hv_Index * 4) + 1, out hv_tempvalue1);HOperatorSet.GetGrayval(ho_Stamps, 0, (hv_Index * 4) + 2, out hv_tempvalue2);HOperatorSet.GetGrayval(ho_Stamps, 0, (hv_Index * 4) + 3, out hv_tempvalue3);////The actual stamp from the Gocator is 64-bit. tempvalue0 is the most significant 16-bit (i.e. the top bit is the sign bit)//The code below assumes we only need the bottom 32-bit information. User need to update this conversion function if they want to//return 64-bit value.//if ((int)(new HTuple(hv_is64bit.TupleEqual(1))) != 0){HOperatorSet.TupleLsh(hv_tempvalue0, 48, out hv_tempvalue0);HOperatorSet.TupleLsh(hv_tempvalue1, 32, out hv_tempvalue1);HOperatorSet.TupleLsh(hv_tempvalue2, 16, out hv_tempvalue2);HOperatorSet.TupleLsh(hv_tempvalue3, 0, out hv_tempvalue3);hv_Value = ((hv_tempvalue0 + hv_tempvalue1) + hv_tempvalue2) + hv_tempvalue3;}else{HOperatorSet.TupleLsh(hv_tempvalue2, 16, out hv_tempvalue2);HOperatorSet.TupleLsh(hv_tempvalue3, 0, out hv_tempvalue3);hv_Value = hv_tempvalue2 + hv_tempvalue3;}return;}/// <summary>/// GenTL16BitRGBBlueImage生成/// </summary>/// <param name="frameCount"></param>/// <param name="timeStamp"></param>/// <param name="encoderValue"></param>/// <param name="encoderIndex"></param>/// <param name="digitalStates"></param>/// <param name="surfaceBufferWidth"></param>/// <param name="surfaceBufferLength"></param>/// <param name="surfaceXOffset"></param>/// <param name="surfaceXResolution"></param>/// <param name="surfaceYOffset"></param>/// <param name="surfaceYResolution"></param>/// <param name="surfaceZOffset"></param>/// <param name="surfaceZResolution"></param>/// <param name="intensityEnable"></param>/// <param name="GenTL16BitRGBBlueImage"></param>private static void GenGenTL16BitRGBBlueImage(long frameCount, long timeStamp, long encoderValue, long encoderIndex, long digitalStates,long surfaceBufferWidth, long surfaceBufferLength,long surfaceXOffset, long surfaceXResolution,long surfaceYOffset, long surfaceYResolution,long surfaceZOffset, long surfaceZResolution,long intensityEnable,out HObject GenTL16BitRGBBlueImage){try{#region 初始BlueImage缓存//BlueImage缓存ushort[] blueChannel = new ushort[surfaceBufferWidth * surfaceBufferLength];//临时变量ushort temp0 = 0, temp1 = 0, temp2 = 0, temp3 = 0;//VersionblueChannel[0] = 0;blueChannel[1] = 0;blueChannel[2] = 0;blueChannel[3] = 0;//Frame CountLong2UShort(frameCount, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[4] = temp0;blueChannel[5] = temp1;blueChannel[6] = temp2;blueChannel[7] = temp3;//TimeStampLong2UShort(timeStamp, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[8] = temp0;blueChannel[9] = temp1;blueChannel[10] = temp2;blueChannel[11] = temp3;//Encoder value(ticks)Long2UShort(encoderValue, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[12] = temp0;blueChannel[13] = temp1;blueChannel[14] = temp2;blueChannel[15] = temp3;//Encoder index (ticks)Long2UShort(encoderIndex, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[16] = temp0;blueChannel[17] = temp1;blueChannel[18] = temp2;blueChannel[19] = temp3;//Digital input statesLong2UShort(digitalStates, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[20] = temp0;blueChannel[21] = temp1;blueChannel[22] = temp2;blueChannel[23] = temp3;//X offset (nm)Long2UShort(surfaceXOffset, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[24] = temp0;blueChannel[25] = temp1;blueChannel[26] = temp2;blueChannel[27] = temp3;//X resolution(nm)Long2UShort(surfaceXResolution, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[28] = temp0;blueChannel[29] = temp1;blueChannel[30] = temp2;blueChannel[31] = temp3;//Y offset (nm)Long2UShort(surfaceYOffset, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[32] = temp0;blueChannel[33] = temp1;blueChannel[34] = temp2;blueChannel[35] = temp3;//Y resolution (nm)Long2UShort(surfaceYResolution, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[36] = temp0;blueChannel[37] = temp1;blueChannel[38] = temp2;blueChannel[39] = temp3;//Z offset (nm)Long2UShort(surfaceZOffset, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[40] = temp0;blueChannel[41] = temp1;blueChannel[42] = temp2;blueChannel[43] = temp3;//Z resolution (nm)Long2UShort(surfaceZResolution, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[44] = temp0;blueChannel[45] = temp1;blueChannel[46] = temp2;blueChannel[47] = temp3;//Height map Width (in pixels)Long2UShort(surfaceBufferWidth, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[48] = temp0;blueChannel[49] = temp1;blueChannel[50] = temp2;blueChannel[51] = temp3;//Height map length (in pixels)Long2UShort(surfaceBufferLength, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[52] = temp0;blueChannel[53] = temp1;blueChannel[54] = temp2;blueChannel[55] = temp3;//Specify if intensity is enabled or notLong2UShort(intensityEnable, ref temp0, ref temp1, ref temp2, ref temp3);blueChannel[56] = temp0;blueChannel[57] = temp1;blueChannel[58] = temp2;blueChannel[59] = temp3;#endregion#region 创建GenTL16BitRGBBlueImageunsafe{fixed (ushort* p = blueChannel)HOperatorSet.GenImage1(out GenTL16BitRGBBlueImage, "uint2", surfaceBufferWidth, surfaceBufferLength, new IntPtr(p));}#endregion}catch (Exception ex){throw ex;}}/// <summary>/// Long类型ToUint2类型转换器/// </summary>/// <param name="value"></param>/// <param name="valueL0"></param>/// <param name="valueL1"></param>/// <param name="valueL2"></param>/// <param name="valueL3"></param>private static void Long2UShort(long value, ref ushort valueL0, ref ushort valueL1, ref ushort valueL2, ref ushort valueL3){valueL0 = (ushort)(value >> 48);valueL1 = (ushort)(value >> 32);valueL2 = (ushort)(value >> 16);valueL3 = (ushort)(value >> 0);}#endregion}
}
LMI相机的运行逻辑并不难,一个主要是如何配置LMI相机,另一个是如何转换格式图像。代码中提供了3种转换方式,分别有:GenTL格式,带标定数据的halcon类型,不带标定数据的halcon类型。
如何配置LMI相机后面会再开一份博客进行讲解。
其中需要注意的事情又:
第一:LMI的相机SDK与VS的版本(。net版本)有部分冲突,再使用.net4.72和VS2022时发现,最新版LMISDK无法运行,暂时可以使用旧版SDK。
第二:LMI相机加速器,只能使用相机相对应版本的加速器进行加速,相机SDK中并没有内置加速器。
相关文章:
,软触发硬触发(飞拍),并输出halcon格式对象)
相机通用类之LMI激光三角相机(3D),软触发硬触发(飞拍),并输出halcon格式对象
//在此之前可以先浏览我编写的通用上位机类,更方便理解 https://blog.csdn.net/m0_51559565/article/details/134403745最近完成一个关于LMI激光三角(3D相机)采图的demo,记录并说明用法。 先上代码。 using Lmi3d.GoSdk; using L…...

android studio基本使用
as如果一直index,就把缓存目录全部删除 记录下as日常使用。 调试工具 c动态库调试 ndk会带一些调试工具,例如 C:\Users\luopu\AppData\Local\Android\Sdk\ndk\20.0.5594570\toolchains\aarch64-linux-android-4.9\prebuilt\windows-x86_64\bin\aarch…...

安装包管理工具-Yarn
一、介绍与安装 1.1 介绍 Yarn是一款功能包管理工具,与npm(npm:Node.js 的包管理器 npm,是目前最流行的Node.js 的包管理器。)类似。有着FAST(快速的), RELIABLE( RELIABLE 可信赖的), AND SECURE DEPENDENCY MANAGEMENT(安全依赖关系管理)的特点。 Yarn官网 1.2…...
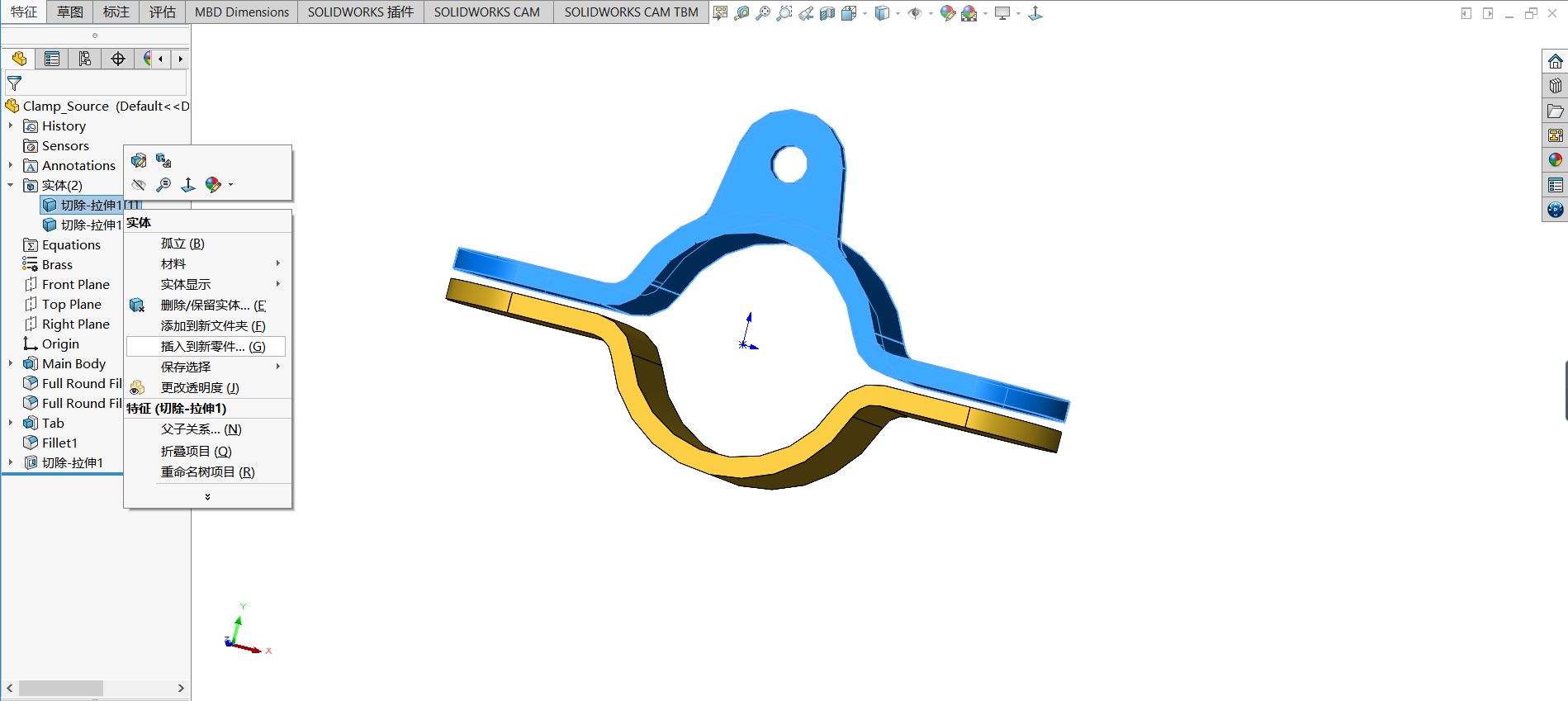
SOLIDWORKS功能布局实用技巧之保存实体技术
在SOLIDWORKS软件中,有一些命令可以将一个或多个实体保存为独立的零件文件。然而,每个命令都具有不同的特性,有些命令的选项可以让您在保存多个零件时直接生成装配体文件。让我们来深入了解这些功能布局技巧,特别是实体保存技术。…...

Android11 将logcat日志定位到uart串口输出
软件平台:Android11 硬件平台:QCS6125 需求:如题,串口需要输出logcat的系统全量日志,我这里边是把logcat日志定向到了/dev/kmsg从而使logcat跟kmsg一样通过串口输出。 改动如下: diff --git a/rootdir/…...
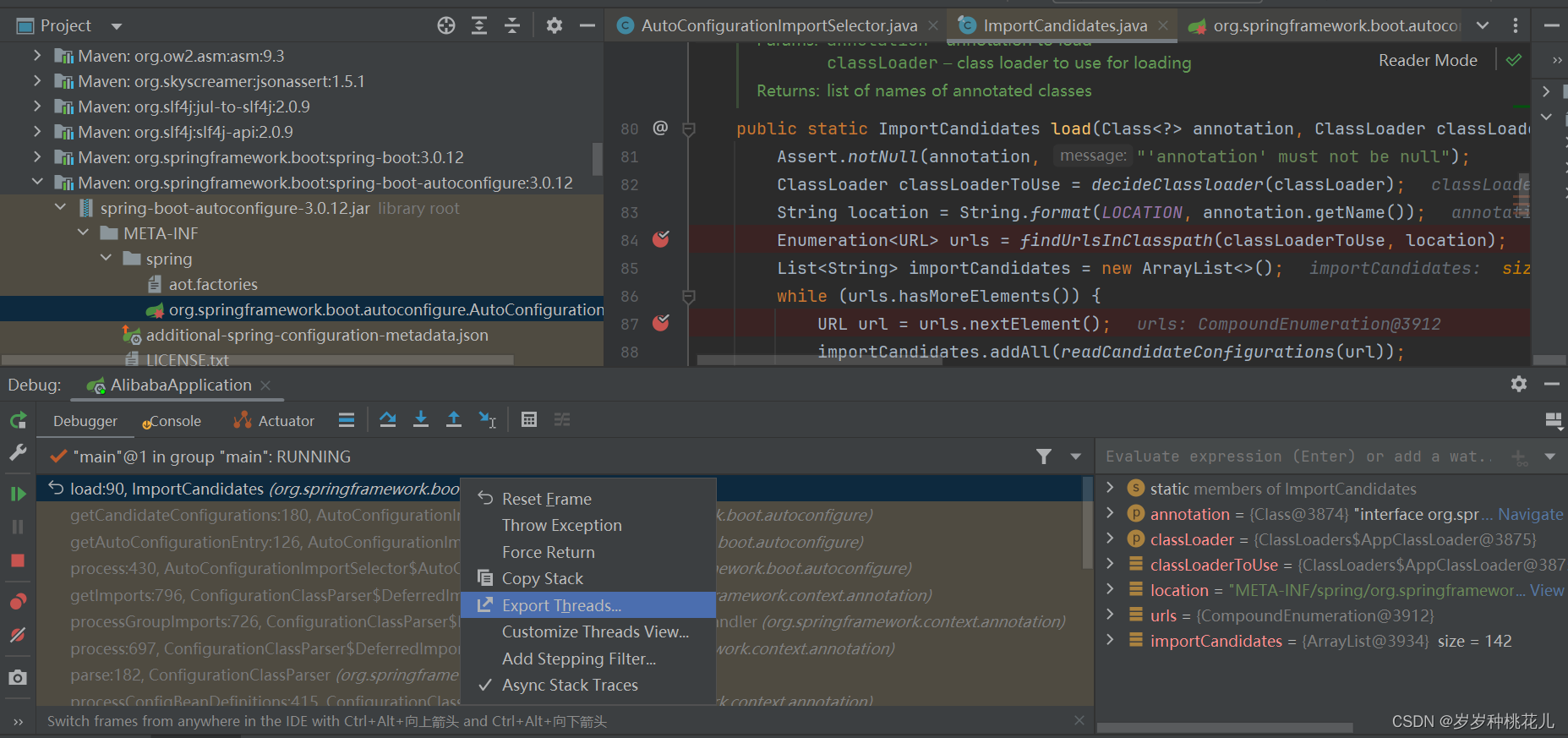
SpringSecurity6从入门到上天系列第六篇:解决这个问题为什么在引入SpringSecurity之后所有的请求都需要先做登录认证才可以进行访问呢
文章目录 问题引入 1:问题阐述 2:问题分析 一:从SpringBoot的自动装配 1:SpringBootApplication介绍 2:自动装配的核心方法 3:核心方法的调用路径 4:SpringSecurity核心配置 5…...

Mac M3 芯片安装 Nginx
Mac M3 芯片安装 Nginx 一、使用 brew 安装 未安装 brew 的可以参考 【Mac 安装 Homebrew】 或者 【Mac M2/M3 芯片环境配置以及常用软件安装-前端】 二、查看 nginx 信息 通过命令行查看 brew info nginx可以看到 nginx 还未在本地安装,显示 Not installed …...
浏览器怎么更新?4个高效设置方法!
“我在使用浏览器时,有时候会提示说浏览器版本太低,需要更新后才能使用。有什么方法可以更新浏览器呢?快给我支支招吧!” 在快速发展的科技时代,浏览器更新是确保网络安全和性能优化的关键步骤。如果浏览器的版本太低&…...
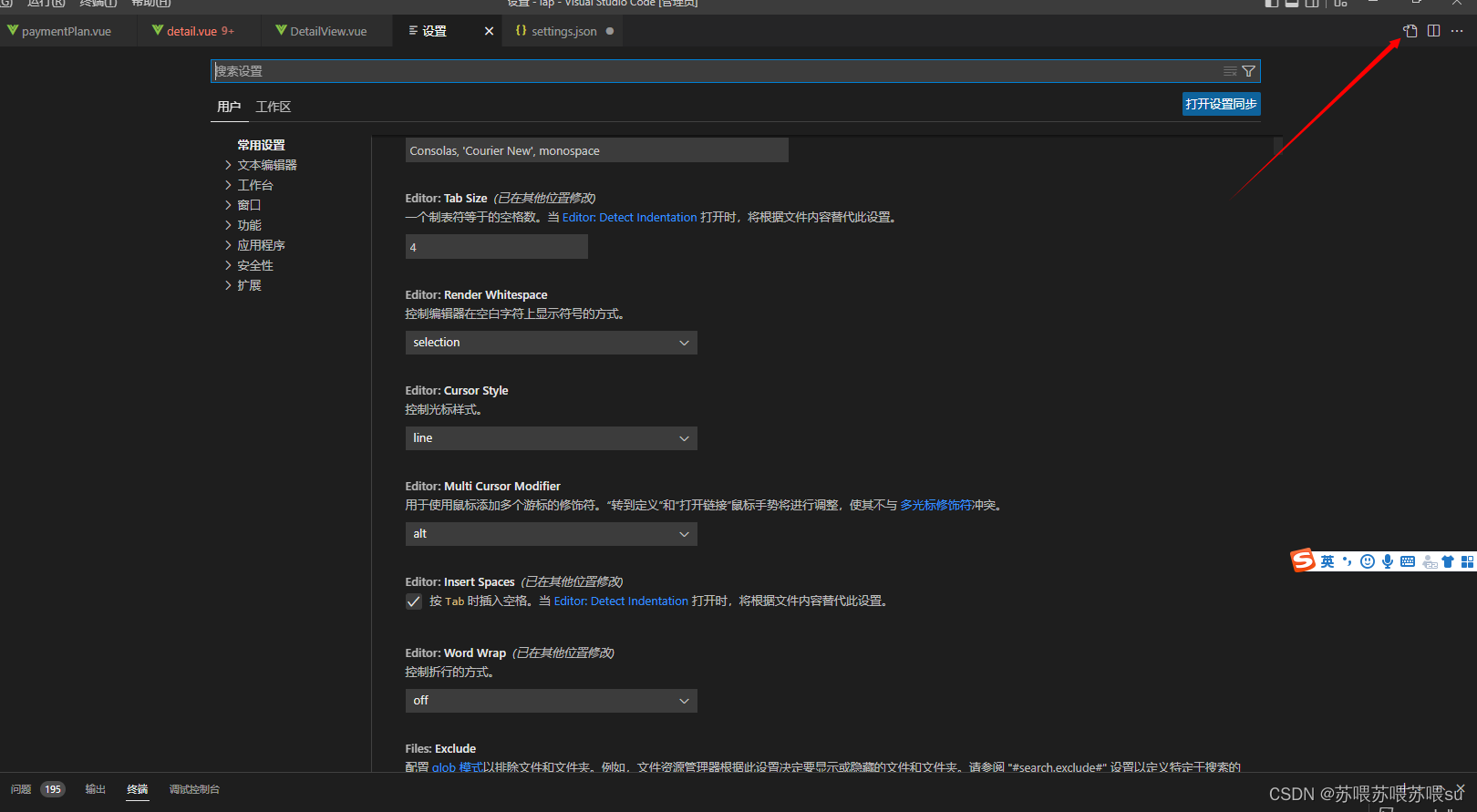
settings.json配置
settings.json配置 {"editor.tabSize": 2,"git.ignoreWindowsGit27Warning": true,"workbench.editor.untitled.hint": "hidden","security.workspace.trust.untrustedFiles": "open","[vue]": {"…...
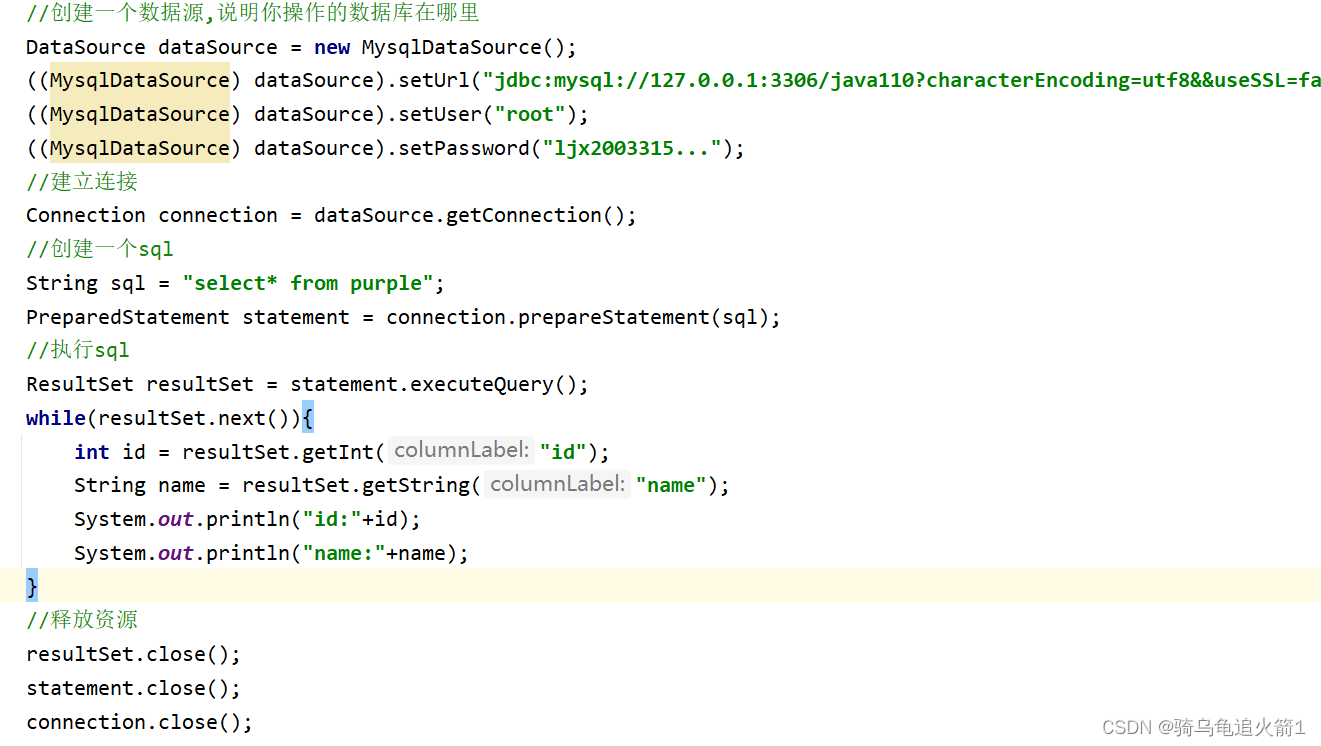
Mysql中的JDBC编程
JDBC编程 1.JDBC的数据库编程2.JDBC工作原理3.JDBC使用3.1JDBC开发案例3.2JDBC使用步骤总结 4.JDBC API4.1数据库连接Connection4.2 Statement对象4.3 ResultSet对象4.4 释放 5.Java代码操作数据库 1.JDBC的数据库编程 JDBC,即Java Database Connectivity࿰…...

媒体行业的3D建模:在影视中创造特效纹理
在线工具推荐: 三维数字孪生场景工具 - GLTF/GLB在线编辑器 - Three.js AI自动纹理化开发 - YOLO 虚幻合成数据生成器 - 3D模型在线转换 - 3D模型预览图生成服务 在本文中,我们将探讨 3D 建模在媒体行业中的作用,特别是它在影视特效创作…...

Kafka从安装使用到集成Springboot详细教程
“不积跬步,无以至千里。” 1. 引言 在当今高度互联的技术领域,消息队列成为分布式系统中不可或缺的一部分。Apache Kafka作为一个高性能、持久化、分布式的消息队列系统,备受开发者推崇。这篇文章将从安装到集成Spring的全方位介绍Kafka的使…...

【giszz笔记】产品设计标准流程【4】
(续上回) 我们继续把扩展考虑UX环节的产品打造标准流程,来进行梳理。 一千个人心中有一千个哈姆雷特,本文将日常大家耳熟能详,但是又未必人人心中成体系的产品打造标准流程,进行总结。 考虑了两种项目&a…...
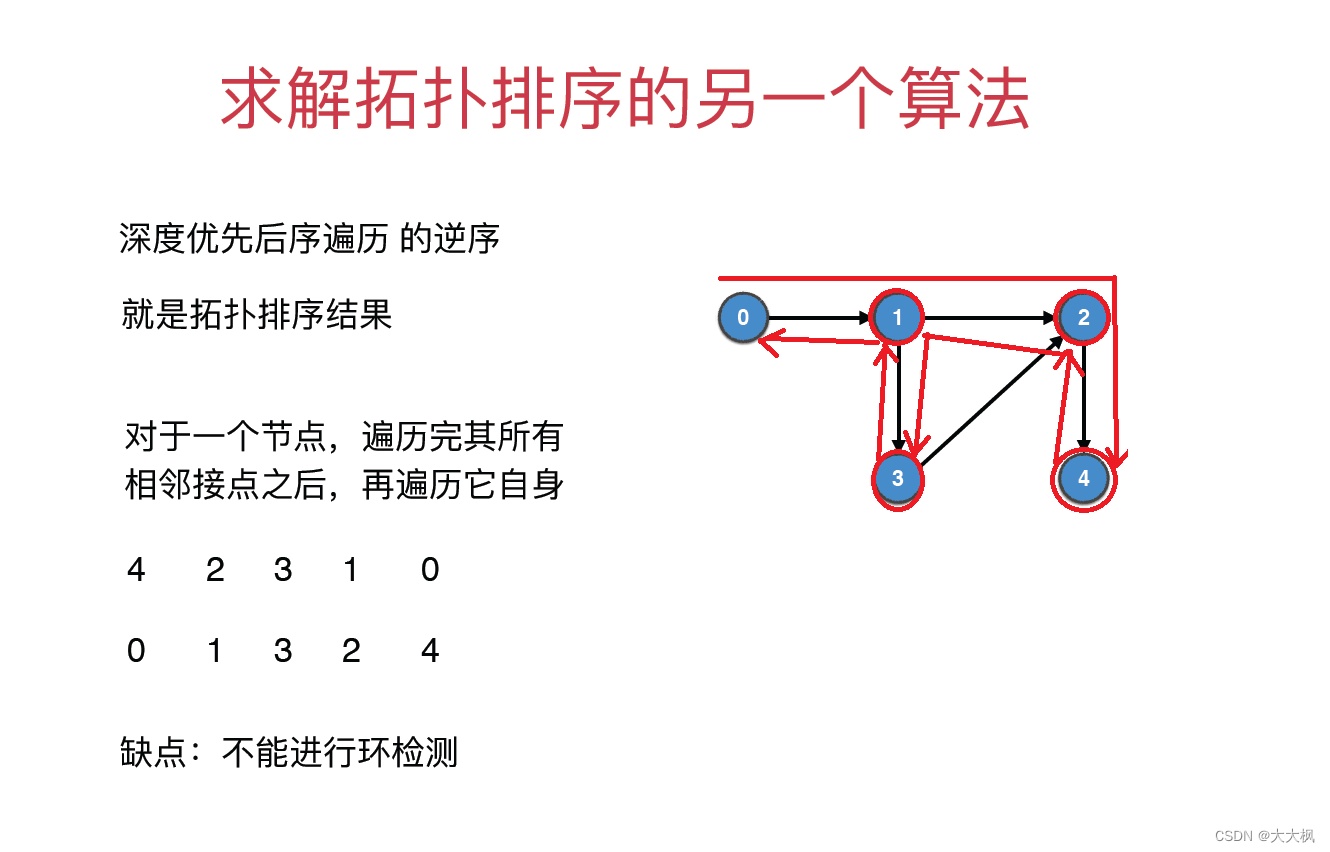
图论16-拓扑排序
文章目录 1 拓扑排序2 拓扑排序的普通实现2.1 算法实现 - 度数为0入队列2.2 拓扑排序中的环检测 3 深度优先遍历的后续遍历3.1 使用环检测类先判断是否有环3.2 调用无向图的深度优先后续遍历方法,进行DFS 1 拓扑排序 对一个有向无环图G进行拓扑排序,是将…...
SecureCRT 9.4.2最新终端SSH工具
SecureCRT是一款终端SSH工具,它提供了类似于Telnet和SSH等协议的远程访问功能。SecureCRT软件特色包括: 支持SSH(SSH1和SSH2)的终端仿真程序,能在Windows下登录UNIX或Linux服务器主机。SecureCRT支持SSH,同…...
基于python+django的美食餐厅点餐订餐网站
运行环境 开发语言:Python python框架:django 软件版本:python3.7 数据库:mysql 5.7 数据库工具:Navicat11 开发软件:PyCharm/vscode 前端框架:vue.js 项目介绍 本论文主要论述了如何使用python语言开发…...

Moka人事:实现无代码开发的API连接,打通电商平台与用户运营系统
无代码开发的API连接:Moka人事的核心优势 Moka人事,是北京希瑞亚斯科技有限公司于2015年推出的一款数据驱动的智能化HR SaaS产品。这款产品的主要优势在于其无需进行API开发即可实现系统的连接和集成,这不仅大大提升了企业的工作效率&#x…...

【Spring】超详细讲解AOP(面向切面编程)
文章目录 1. 前言2. 什么是AOP3. AOP快速入门4. AOP的核心概念5. 切点表达式6. 切点函数7. 通知8. 总结 1. 前言 本文围绕AOP进行讲解,AOP可以做什么,涉及到了哪些注解,以及各个注解运行的时机,以及Around相较于其它注解有什么不同,并且如果要执行目标方法需要怎么做 2. 什么…...
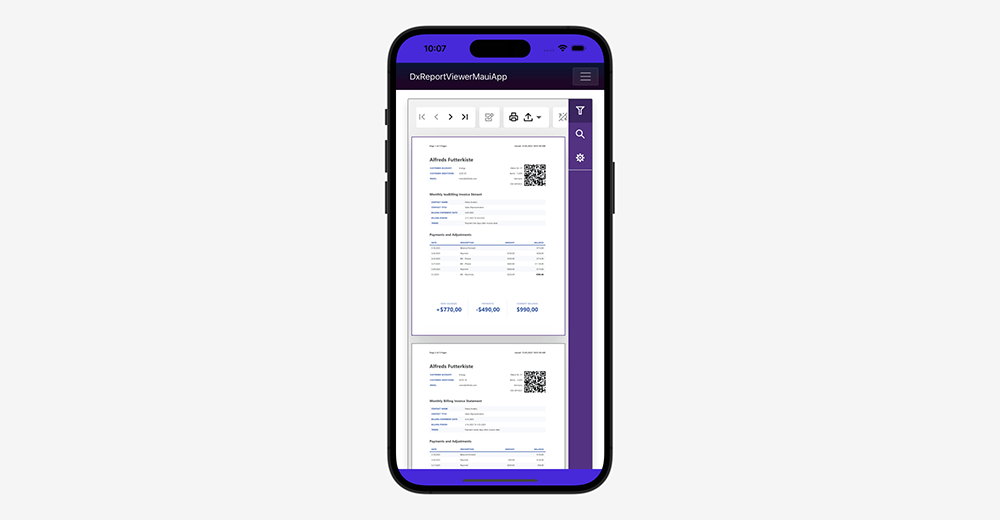
界面组件DevExpress Reporting v23.1亮点 - 全新升级报表查看器
DevExpress Reporting是.NET Framework下功能完善的报表平台,它附带了易于使用的Visual Studio报表设计器和丰富的报表控件集,包括数据透视表、图表,因此您可以构建无与伦比、信息清晰的报表 界面组件DevExpress Reporting v23.1已经发布一段…...

电容容量换算电池容量,以及RTC持续时间计算
依据 公式1:QI*t 公式2:QC*U 其中: Q: 电荷量 (库仑) I: 电流 (安培) t: 时间 (秒) C: 电容量 (法拉…...

5个必知的Universal-Updater高级功能:从QR扫描到后台安装
5个必知的Universal-Updater高级功能:从QR扫描到后台安装 【免费下载链接】Universal-Updater An easy to use app for installing and updating 3DS homebrew 项目地址: https://gitcode.com/gh_mirrors/un/Universal-Updater Universal-Updater是一款专为任…...

浏览器指纹识别机制深度剖析与反识别技术实现
一、浏览器指纹技术基础认知1.1 浏览器指纹的核心定义在数字化时代,每一台接入互联网的设备都会留下独特的数字标识,浏览器指纹便是其中最关键的识别凭证之一。浏览器指纹是网站通过 JavaScript 脚本、HTTP 请求头、硬件接口调用等多种技术手段ÿ…...

ZTE光猫工厂模式解锁:5分钟开启隐藏功能的终极指南
ZTE光猫工厂模式解锁:5分钟开启隐藏功能的终极指南 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 核心关键词:ZTE光猫工厂模式解锁 长尾关键词: ZT…...

打造XBEE封装BLE112蓝牙模块:硬件设计、射频布局与调试全攻略
1. 项目概述:为什么我们需要一个“XBEE格式”的蓝牙模块?在嵌入式开发和物联网项目中,无线通信模块的选择往往决定了项目的成败。对于很多工程师和创客来说,Silicon Labs(芯科科技)的BLE112/113模块是蓝牙4…...

DeepSeek模型微调全链路解析:从数据准备、LoRA配置到推理部署的7大关键步骤
更多请点击: https://intelliparadigm.com 第一章:DeepSeek模型微调全链路概览 DeepSeek系列大语言模型(如DeepSeek-V2、DeepSeek-Coder)凭借其开源特性、高性能推理能力与丰富的领域适配性,已成为工业界与学术界微调…...

UE5项目打包后RenderTarget导出图片全黑?手把手教你解决伽马校正与资产打包问题
UE5打包后RenderTarget导出图片全黑的终极解决方案当你花了整整三天时间调试RenderTarget导出功能,终于在编辑器里看到完美的截图效果,却在打包成可执行文件后发现所有导出的图片都变成了一片漆黑——这种从云端跌入谷底的感觉,每个UE开发者都…...

AI Agent 为什么必须有“记忆系统”?
导语:大模型不是没有智商,而是经常没有“记性”。真正能长期干活的 Agent,不是靠无限拉长上下文,而是靠一套会压缩、会检索、会遗忘、会治理的外置记忆系统。一、先给结论:Agent 的记忆系统,本质是“上下文…...

ComfyUI-WD14-Tagger:AI智能图像标签提取的终极完整指南
ComfyUI-WD14-Tagger:AI智能图像标签提取的终极完整指南 【免费下载链接】ComfyUI-WD14-Tagger A ComfyUI extension allowing for the interrogation of booru tags from images. 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-WD14-Tagger 在AI图像…...

概率论:常见分布的期望与方差、中心极限定理、切比雪夫不等式
目录 一、0、1分布 二、二项分布 三、泊松分布 四、均匀分布 五、指数分布 六、正态分布 七、中心极限定理及其应用 (1)中心极限定理的定义 (2)使用示例 八、切比雪夫不等式 (1)切比雪夫不…...

【国家级攻防演练级建议】:DeepSeek私有化部署中4类隐蔽后门植入路径与实时检测方案
更多请点击: https://kaifayun.com 第一章:DeepSeek私有化部署中隐蔽后门植入的攻防对抗本质 在私有化场景下,DeepSeek模型的部署链路常跨越镜像构建、权重加载、推理服务启动及API网关接入等多个环节。攻击者可利用构建上下文污染、依赖包劫…...