ROS 多机器人导航RVIZ环境的配置
文章目录
- 前言
- 一、添加多个2D Pose Estimate/2D nav Goal
- 二、RVIZ的其他配置
- 1.RobotModel
- 总结
前言
前文ROS Turtlebot3多机器人编队导航仿真写了多机器人呢导航的代码实现,本文主要说明,RVIZ导航环境的配置,如何添加多个2D Pose Estimate/2D Nav Goal,以及一些主要话题的订阅。
一、添加多个2D Pose Estimate/2D nav Goal
正常情况下我们进行机器人的导航,打开RVIZ后一般只有一组2D Pose Estimate/2D nav Goal,来调整机器人的初始位置/给定导航的目标点
 但是在多机器人导航时需要同时给多个机器人发布导航的目标点,故需要在RVIZ仿真环境中添加多组2D Pose Estimate/2D nav Goal,通过修改navigation.launch加载的.rviz环境来添加:
但是在多机器人导航时需要同时给多个机器人发布导航的目标点,故需要在RVIZ仿真环境中添加多组2D Pose Estimate/2D nav Goal,通过修改navigation.launch加载的.rviz环境来添加:

在文件的最后tool标签下,复制粘贴
Tools:- Class: rviz/MoveCamera- Class: rviz/InteractHide Inactive Objects: true- Class: rviz/Select- Class: rviz/SetInitialPoseTheta std deviation: 0.2617993950843811Topic: tb3_0//initialposeX std deviation: 0.5Y std deviation: 0.5- Class: rviz/SetGoalTopic: tb3_0/move_base_simple/goal- Class: rviz/SetInitialPoseTheta std deviation: 0.2617993950843811Topic: tb3_1//initialposeX std deviation: 0.5Y std deviation: 0.5- Class: rviz/SetGoalTopic: tb3_1/move_base_simple/goal- Class: rviz/SetInitialPoseTheta std deviation: 0.2617993950843811Topic: tb3_2//initialposeX std deviation: 0.5Y std deviation: 0.5- Class: rviz/SetGoalTopic: tb3_2/move_base_simple/goal- Class: rviz/MeasureValue: true

即可实现在RVIZ中添加多个2D Pose Estimate/2D nav Goal,注意要在Topic前面加具体的机器人名称哦!

二、RVIZ的其他配置
1.RobotModel
需要注意在每个robot_description和TF Prefix前加上机器人的名称,默认是没有加机器人名称的哦。
 然后是订阅机器人发布的粒子Topic
然后是订阅机器人发布的粒子Topic
 订阅机器人局部代价地图Topic
订阅机器人局部代价地图Topic

LaserScan

Global path
 Local path
Local path
 Pose
Pose

总结
当然可以根据自己的需要,和想要达成的效果灵活的选用和调整RVIZ各个功能选项,不难,只要肯花时间,都能实现自己想要的功能的!
相关文章:
ROS 多机器人导航RVIZ环境的配置
文章目录 前言一、添加多个2D Pose Estimate/2D nav Goal二、RVIZ的其他配置1.RobotModel 总结 前言 前文ROS Turtlebot3多机器人编队导航仿真写了多机器人呢导航的代码实现,本文主要说明,RVIZ导航环境的配置,如何添加多个2D Pose Estimate/…...
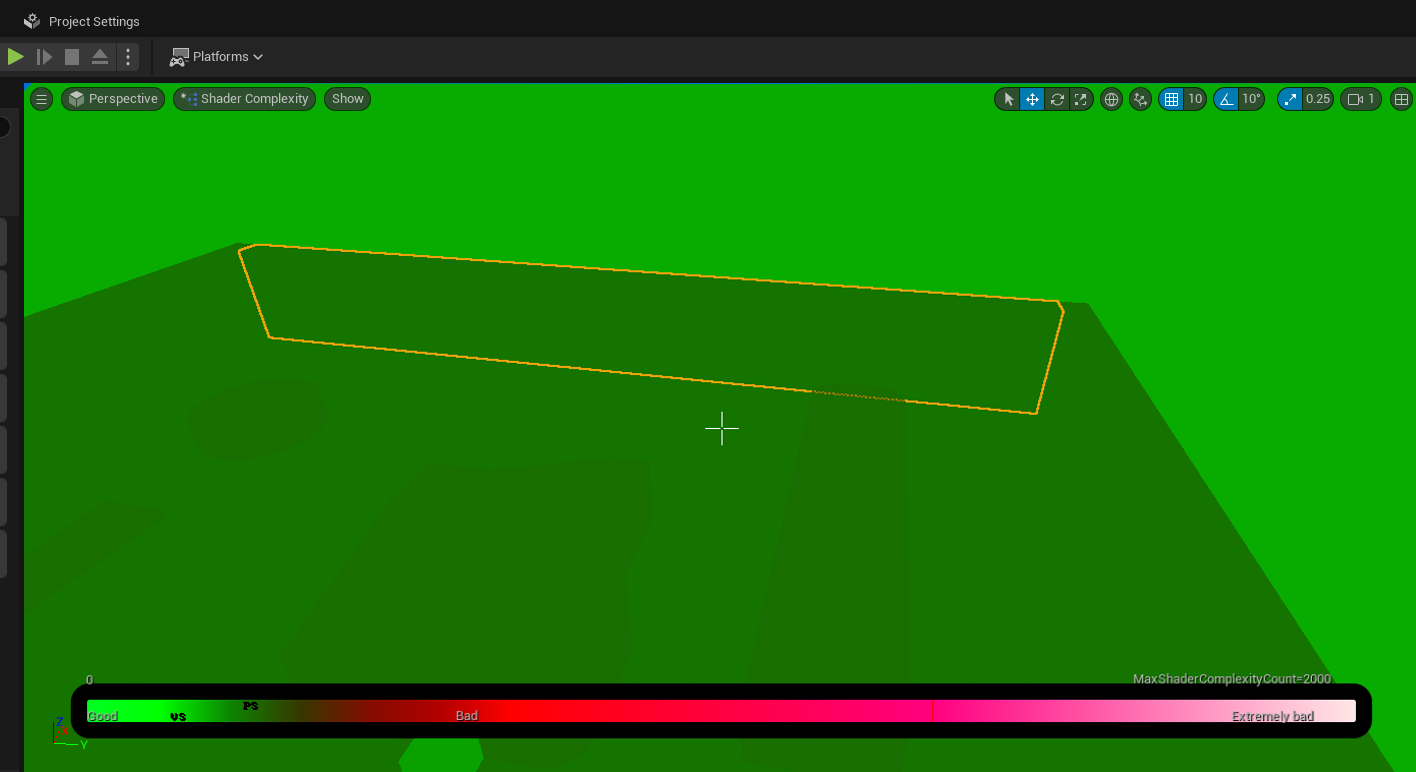
UE4 / UE5 内存与性能优化
性能优化 资源压缩粒子优化NavMeshGenerate Overlap EventGCMarkTime光照优化Shader优化卡的时间长LOD官方CPU、GPU Insights、stat cpu、 ue4 memory report、inter GPA 、RenderDOC、减少模型面数等 资源压缩 在图片资源上右键选择Size Map可以看到资源所占大小,…...

dotnet core程序部署到ubuntu
visual studio2022编译好的dotnet core程序,打开“程序包管理器控制台”,打包发布dotnet core,使用命令 dotnet publish -c Release -r ubuntu.22.04-x64打包会生成ubuntu22.04-x64文件夹,将这个文件夹传到ubuntu服务器,切换到ubu…...
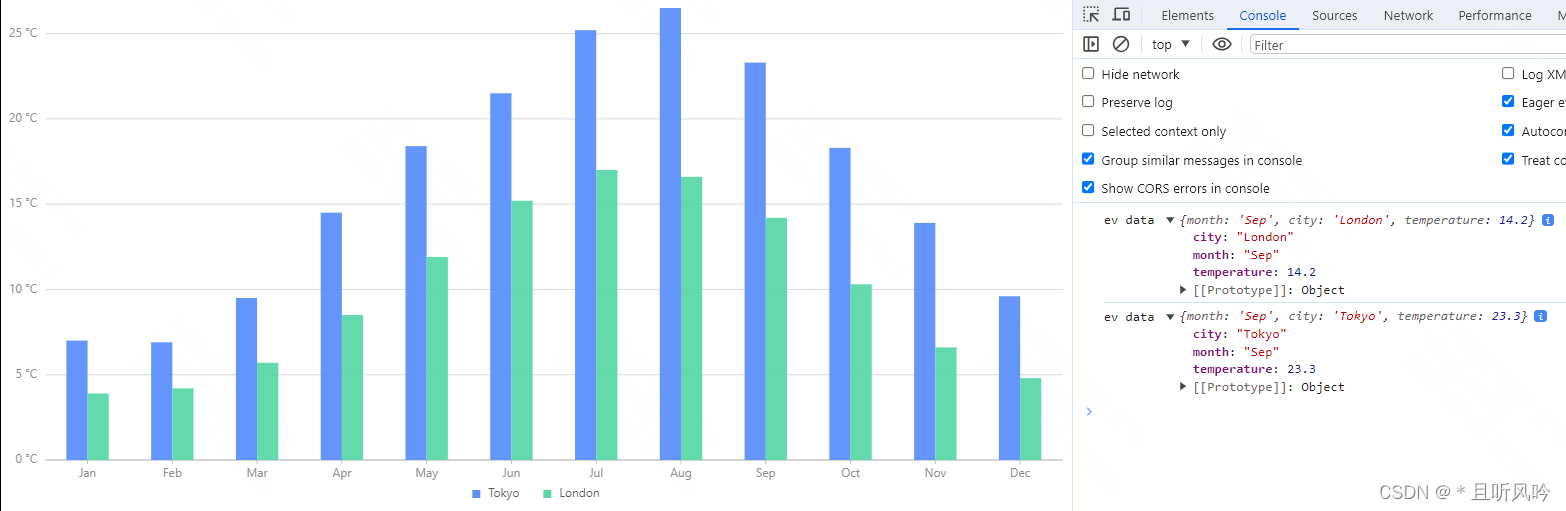
Antv/G2 柱状图添加自定义点击事件
<!DOCTYPE html> <html><head><meta charset"UTF-8"><title>柱状图点击事件</title></head><body><div id"container" /><script src"https://gw.alipayobjects.com/os/lib/antv/g2/4.2.8/…...
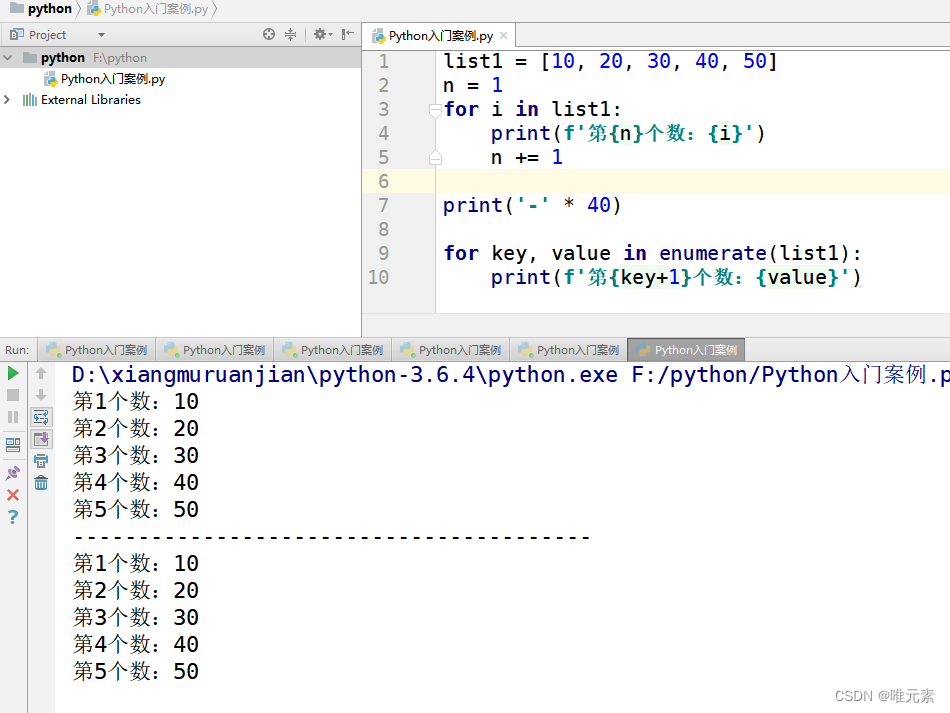
Python---数据序列中的公共方法
公共方法就是 支持大部分 数据 序列。 常见公共方法---简单 运算符描述支持的容器类型合并字符串、列表、元组* 复制字符串、列表、元组in元素是否存在字符串、列表、元组、字典not in元素是否不存在字符串、列表、元组、字典 案例: 合并 代码࿱…...
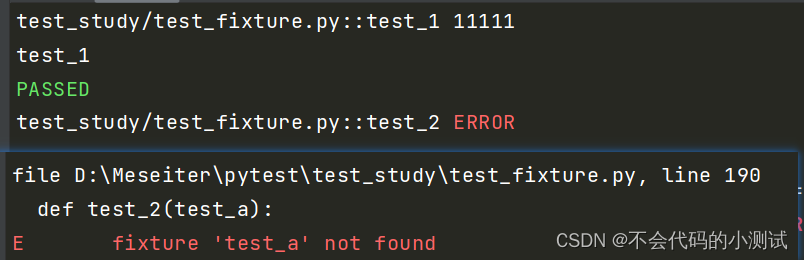
从0开始python学习-33.夹具@pytest.fixture(scope=““,params=““,autouse=““,ids=““,name=““)
目录 1. 创建夹具 1.1 pytest方式 1.2 unittest方式 2. 使用夹具 2.1 通过参数引用 2.2 通过函数引用 3. 参数详解 3.1 scope:作用域 3.2 params-参数化 3.3 autouseTrue表示自动使用,默认为False 3.4 ids:设置变量名 3.5 name&am…...
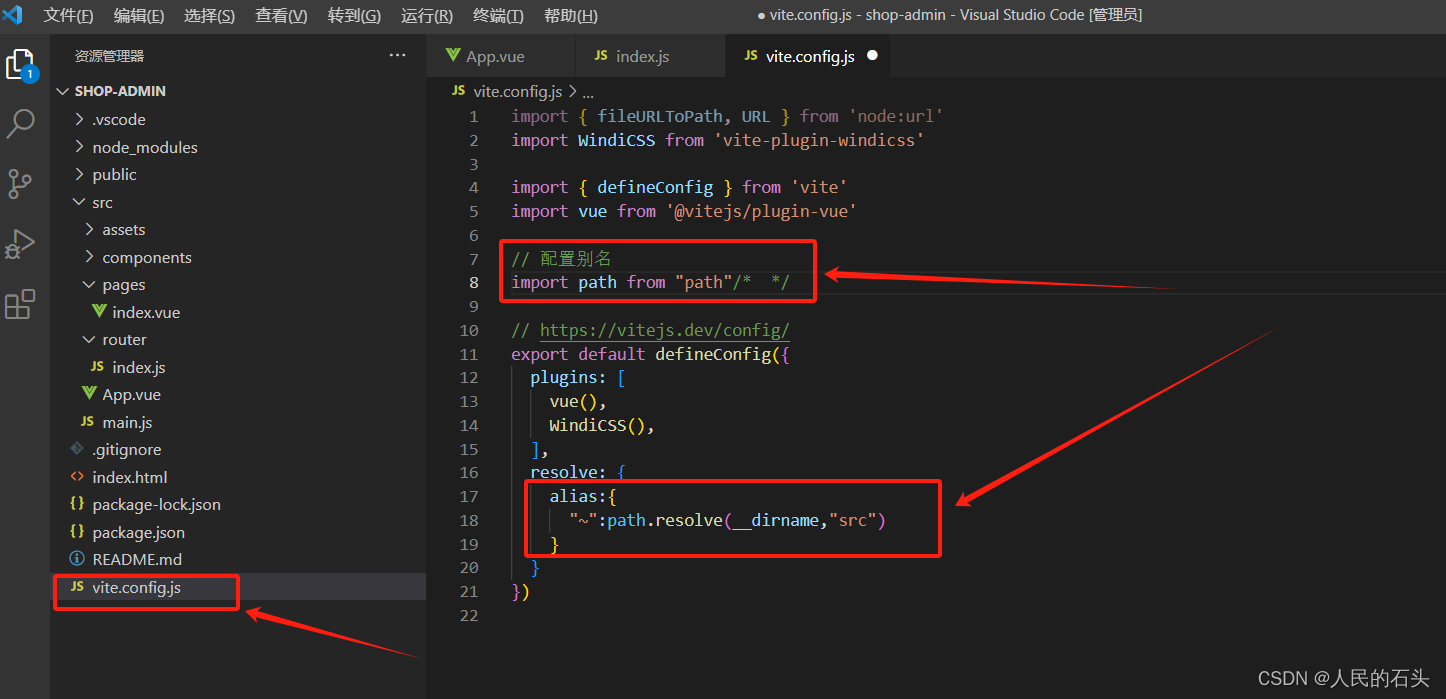
vue3别名配置(vite)
1、配置别名的优点: 在VUE项目中import导入文件时,可以写相对路径. 2、在vite.config.js中配置 a. 首先引入path import path from "path"/* */ b.在resolve添加别名,例如: alias:{"~":path.resolve(__di…...
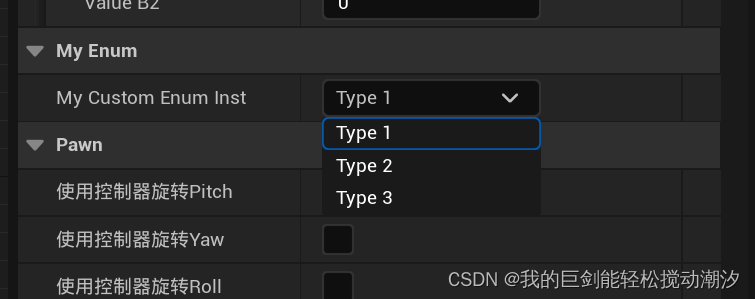
初学UE5 C++①
目录 游戏类 三种时间函数类型函数和提示类型 FName、FString、FText类型相互转化 数组容器 键值容器 集合容器 基本类型打印 UPROPERTY宏 函数 枚举 法1 法2 结构体 其他 蓝图生成时暴露 游戏类 1.创建所需项的类 2.创建游戏模式类,在该类上实现所需…...

ElasticSearch6.8.1 常见错误
1.vm.max_map_count max virtual memory areas vm.max_map_count [65530] is too low, increase to at least [262144] 1.1 修改 /etc/sysctl.conf 只添加最后vm值即可,sysctl -p /etc/sysctl.conf net.ipv4.conf.all.accept_redirects0 net.ipv4.tcp_tw_reuse1 n…...
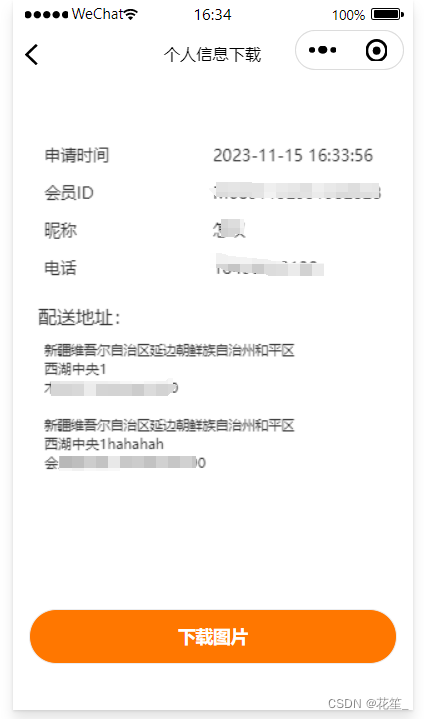
wx.canvasToTempFilePath生成图片保存到相册
微信小程序保存当前画布指定区域的内容导出生成指定大小的图片,记录一下 api:wx.canvasToTempFilePath 效果: 代码:wxml <canvas style"width: {{screenWidth}}px; height: {{canvasHeight}}px;" canvas-id"my…...

HDU1276:士兵队列训练问题 ← STL queue
【题目来源】http://acm.hdu.edu.cn/showproblem.php?pid1276【题目描述】 某部队进行新兵队列训练,将新兵从一开始按顺序依次编号,并排成一行横队,训练的规则如下:从头开始一至二报数,凡报到二的出列,剩下…...

JS 读取excel文件内容 和 将json数据导出excel文件
一、实现将json数据导出为excel文件 1、通过原生js实现 核心方法: function JSONToExcelConvertor(JSONData, FileName, title, filter) {if (!JSONData)return;//转化json为objectvar arrData typeof JSONData ! object ? JSON.parse(JSONData) : JSONData;va…...
ASP.NET限流器的简单实现
一、滑动时间窗口 我为RateLimiter定义了如下这个简单的IRateLimiter接口,唯一的无参方法TryAcquire利用返回的布尔值确定当前是否超出设定的速率限制。我只提供的两种基于时间窗口的实现,如下所示的基于“滑动时间窗口”的实现类型SliddingWindowRateL…...

汇编语言循环左移和循环右移如何实现的,详细的比喻一下
汇编语言中的循环左移(ROL)和循环右移(ROR)是两种基本的位操作,通常用于低级编程任务,如加密、解密、数据处理等。我将使用一个详细的比喻来解释这两种操作,以使其更易于理解。 循环左移&#…...

ChromeDriver 各版本下载地址
chromedriver 115及115之后版本下载地址:https://googlechromelabs.github.io/chrome-for-testing/ chromedriver 115之前版本下载地址:http://chromedriver.storage.googleapis.com/index.html...

计算机网络之物理层
物理层 1. 物理层的基本概念 2.物理层下面的传输媒体 传输媒体可分为两类,一类是导引型传输媒体,另一类是非导引型传输媒体。 3.传输方式 3.1 串行传输和并行传输 串行传输:串行传输是指数据是一个比特依次发送的,因此在发送端…...

沉浸式航天vr科普馆VR太空主题馆展示
科普教育从小做起,现在我们的很多地方小孩子游乐体验不单单只有草坪玩耍体验,还有很多科普知识的体验馆和游玩馆。虽然现在我们还不能真实的上太空或者潜入海底,但是这些现在已经可以逼真的展示在我们面前。通过一种虚拟现实技术手段。人们带…...

AI电话机器人能否代替人工?优缺点介绍
AI电话机器人是一种基于人工智能技术的自动语音系统,它可以模拟人类的语音交互,执行客服、销售、调查等任务。随着人工智能的发展,AI电话机器人的功能越来越强大,它们在某些领域已经能够替代人工执行任务。那么,AI电话…...

Java —— 多态
目录 1. 多态的概念 2. 多态实现条件 3. 重写 重写与重载的区别 4. 向上转型和向下转型 4.1 向上转型 4.2 向下转型 5. 多态的优缺点 6. 避免在构造方法中调用重写的方法 我们从字面上看"多态"两个字, 多态就是有多种状态/形态. 比如一个人可以有多种状态, …...

UI自动化测试(弹出框,多窗口)
一、弹出框实战 1、在UI自动化测试中经常会遇到Alert弹出框的场景。Alert类是对话框的处理,主要是对alert警告框。confirm确认框,promp消息对话框。 text():获取alert的文本 dismiss ():点击取消 accept():接受 send-keys():输入 from selenium import …...
)
保姆级教程:用AKShare+Backtrader+quantstats搭建你的第一个本地量化回测环境(避坑指南)
从零搭建本地量化回测系统:AKShare数据抓取Backtrader策略开发quantstats绩效分析实战指南第一次尝试量化投资的开发者常会遇到这样的困境:在线回测平台担心策略泄露,本地搭建环境又卡在依赖安装、数据格式转换等基础环节。本文将用最简化的方…...

jdk1.7 HashMap为什么会出现死循环
JDK 1.7 的 HashMap出现死循环的条件 JDK 1.7 的 HashMap 在多线程并发环境下,如果同时触发扩容操作,就可能会因为其采用的头插法机制而产生一个环形链表,导致程序在调用 get() 等方法时陷入死循环。 JDK 1.7的HashMap在设计上并非线程安全&a…...

高斯混合期望传播算法:突破高阶MIMO检测性能瓶颈
1. 项目概述与核心挑战在无线通信系统的演进中,多输入多输出(MIMO)技术早已不是新鲜概念,它通过部署多根天线,在相同的频带内同时传输多个独立的数据流,从而成倍地提升了频谱效率和系统容量。然而ÿ…...

驳AGI学习不可行论:数据分布与归纳偏置是理论证明的关键
1. 项目概述:当复杂性理论遇上AGI学习的“不可能性”证明最近在AI理论圈子里,一篇题为《Reclaiming AI as a theoretical tool for cognitive science》的论文(简称[VRGA24])引起了不小的波澜。这篇论文的核心主张相当大胆&#x…...

稀疏矩阵:深度学习三大架构的统一数学语言
1. 稀疏矩阵:深度学习架构的统一数学语言在深度学习领域,卷积神经网络(CNN)、循环神经网络(RNN)和Transformer长期被视为三种截然不同的架构范式。但当我们透过表象看本质,会发现它们共享着相同的数学内核——稀疏矩阵运算。这种统一性不仅具…...
)
保姆级教程:Win10到Win11,VMware虚拟机无损迁移全流程(含GRUB修复)
从Win10到Win11:VMware虚拟机无损迁移与GRUB修复终极指南当你拿到崭新的Win11电脑,最头疼的莫过于如何将旧电脑上那些精心配置的VMware虚拟机环境完整迁移过来。特别是那些承载着重要开发环境或测试数据的Linux虚拟机,稍有不慎就可能面临系统…...

物理信息机器学习在声场估计中的应用:原理、实践与前沿
1. 物理信息机器学习:当声学物理遇上数据智能 如果你在声学、音频信号处理或者空间音频领域工作,那么“声场估计”这个词对你来说一定不陌生。简单来说,它就像是用有限的几个“耳朵”(传声器)去“猜”出整个空间里每一…...
)
用Python和LSTM搞定风电功率预测:从数据清洗到区间预测的完整实战(附2018年数据集)
风电功率预测实战:基于Python与LSTM的完整实现指南风电作为清洁能源的重要组成部分,其功率预测对电网调度和能源管理至关重要。本文将带您从零开始构建一个完整的LSTM风电功率预测系统,涵盖数据预处理、模型构建、训练优化到结果可视化的全流…...

解决Keil C51项目中PL/M-51编译警告导致构建失败问题
1. 问题现象与背景分析当使用Keil Vision IDE进行C51项目开发时,许多工程师都遇到过这样一个棘手情况:在点击"Build target"或"Rebuild all target files"后,编译过程会在某个PL/M-51源文件处突然停止。输出窗口显示该文…...

统计学习赋能移动边缘计算:智能网络调度实战解析
1. 项目概述:当边缘计算遇上动态网络,我们如何“聪明”地调度?在移动互联网和物联网应用爆炸式增长的今天,你有没有遇到过这样的场景:在拥挤的地铁里刷短视频,画面却卡顿、加载缓慢;或者&#x…...