Ubuntu18.04安装ROS系统+turtle测试
安装
1.设置安装源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543.安装
sudo apt update
sudo apt install ros-melodic-desktop-full
//tips:ubuntu18安装melodic;ubuntu20是noetic
//卸载命令:sudo apt remove ros-noetic-*
//解决
sudo mv /var/lib/dpkg/info /var/lib/dpkg/info.bk
sudo mkdir /var/lib/dpkg/info
sudo apt-get update
sudo apt-get install -f
sudo apt-get install ros-melodic-desktop-full
4.配置环境变量
//ubuntu20版本
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
//ubuntu18版本
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc5.安装构建依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo apt install python3-rosdep
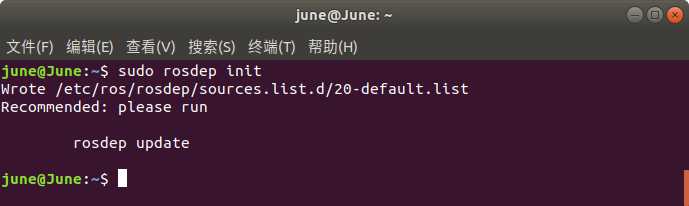
6.初始化
sudo rosdep init
rosdep update
rosdep异常解决:
1.进入"/usr/lib/python3/dist-packages/" 查找rosdep中和raw.githubusercontent.com相关的内容,调用命令:
find . -type f | xargs grep "raw.githubusercontent"
2. 修改四个文件的内容
sudo gedit /rosdistro/__init__.py
sudo gedit ./rosdep2/gbpdistro_support.py
sudo gedit ./rosdep2/sources_list.py
sudo gedit ./rosdep2/rep3.py文件中涉及的 URL 内容,如果是:raw.githubusercontent.com/ros/rosdistro/master都替换成步骤1中准备的gitee.com/zhao-xuzuo/rosdistro/raw/master即可。3.重新sudo rosdep init+rosdep update
遇到这个,说明修改成功。
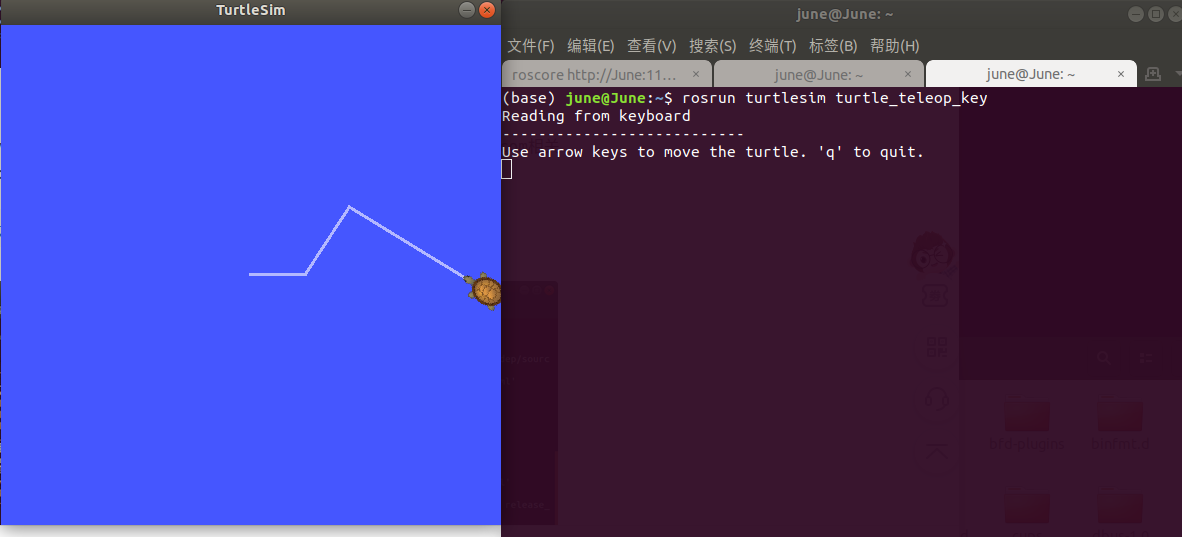
小乌龟Turtle测试
ROS 内置了一些小程序,可以通过运行这些小程序以检测 ROS 环境是否可以正常运行
-
首先启动三个命令行(ctrl + alt + T)
-
命令行1键入:roscore
-
命令行2键入:rosrun turtlesim turtlesim_node(此时会弹出图形化界面)
-
命令行3键入:rosrun turtlesim turtle_teleop_key(在3中可以通过上下左右控制2中乌龟的运动)
相关文章:
Ubuntu18.04安装ROS系统+turtle测试
安装 1.设置安装源 sudo sh -c echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list sudo sh -c . /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubun…...

UE基础篇五:动画
导语: 视频文档在文末 一、动画 1.1 物理资产可以用来做布娃娃系统 1.2 混合空间 调整这个值会在动画切换时有一个插值时间,表现为等一下再切 1.3 启用根运动 1.4 一些导入设置只有在导入时才有效, 1.5 动画图标可以预览调节数值<...
)
SELinux零知识学习十二、SELinux策略语言之客体类别和许可(6)
接前一篇文章:SELinux零知识学习十一、SELinux策略语言之客体类别和许可(5) 一、SELinux策略语言之客体类别和许可 3. 有效的客体类别 (3)System V IPC客体队列 与IPC有关的客体类别代表System V IPC资源。下表总结…...

vscode的git 工具使用
vscode的git 工具使用 目录概述需求: 设计思路实现思路分析1.git 工具的使用2.提交代码3.查看历史提交代码 参考资料和推荐阅读 Survive by day and develop by night. talk for import biz , show your perfect code,full busy,skip hardness,make a be…...
利用回溯绕过正则表达式
目录 利用strpos的特性拿到flag 利用回溯绕过正则表达式 利用回溯次数绕过正则表达式并且实现文件上传 使用回溯绕过正则表达式waf拿到flag 本篇会讲解三个实验来分别绕过正则表达式,python的正则表达式和Javascript的正则表达式大致相同如果有正则表达式不太懂…...

Flutter执行flutter doctor报错HTTP Host Availability
问题描述 [!] HTTP Host Availability✗ HTTP host https://maven.google.com/ is not reachable. Reason: An erroroccurred while checking the HTTP host: Operation timed out解决方案 将文件flutter/packages/flutter_tools/lib/src/http_host_validator.dart中的https:…...
全栈工程师必须要掌握的前端Html技能
作为一名全栈工程师,在日常的工作中,可能更侧重于后端开发,如:C#,Java,SQL ,Python等,对前端的知识则不太精通。在一些比较完善的公司或者项目中,一般会搭配前端工程师&a…...

腾讯云服务器租用价格,腾讯云服务器租用价格多少钱一年?
腾讯云服务器租用价格,腾讯云服务器租用价格多少钱一年?腾讯云服务器有优惠活动,现在租用只需要88元/年!腾讯云服务器优惠购买入口:https://1111.mian100.cn 随着互联网的发展,越来越多的人开始选择将自己…...
QTableWidget 设置列宽行高大小的几种方式及其他常用属性设置
目录 效果: 1.列宽、行高自动分配 2.固定值 3.随内容分配列宽 随内容分配行高 4.水平方向标签拓展剩下的窗口部分,填满表格 5.列宽是自动分配的,但是第一列可手动调整宽度,而表格整体的列宽仍是自动分配的。第二、三列办法调…...
【AI视野·今日CV 计算机视觉论文速览 第277期】Fri, 27 Oct 2023
AI视野今日CS.CV 计算机视觉论文速览 Fri, 27 Oct 2023 Totally 93 papers 👉上期速览✈更多精彩请移步主页 Daily Computer Vision Papers A Coarse-to-Fine Pseudo-Labeling (C2FPL) Framework for Unsupervised Video Anomaly Detection Authors Anas Al lahham…...

【教3妹学编程-算法题】购买物品的最大开销
3妹:2哥,听说你今天发工资啦? 请我吃饭怎么样,嘿嘿 2哥 : 切,你上周还发工资了呢,也没见你请我吃饭。 3妹:哎呀, 我的工资都用来双11 shopping了, 双11过后我都吃了1周土…...

关于pandas dataframe数据转换为JSON格式存储在Redis后,读取数据时发生数据篡改的问题以及解决办法
问题:当时处理股票数据,获取到以dataframe数据结构的股票,由于Redis 是一个内存中的数据结构存储系统,但是不接受dataframe数据结构的数据,选择将其先转化为JSON格式,但发现再将JSON格式转化为原数据时&…...

Go 语言编译环境
1. 请简要介绍一下Go语言的特点。 Go语言是一种静态类型、编译型语言,由Google开发。它的主要特点包括: 简洁高效:Go语言的语法非常简洁,易于学习和使用。同时,Go语言的执行效率高,适合开发高性能的后端服…...
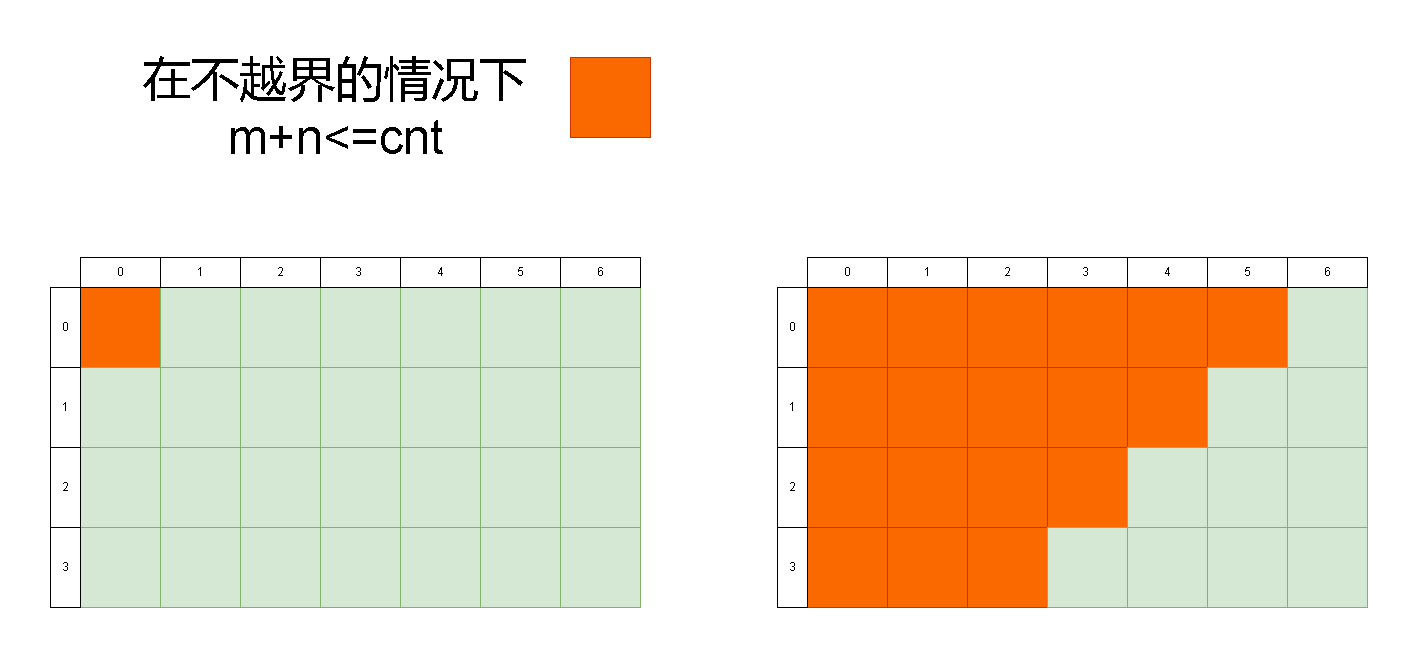
Leetcode刷题详解——衣橱整理
1. 题目链接:LCR 130. 衣橱整理 2. 题目描述: 家居整理师将待整理衣橱划分为 m x n 的二维矩阵 grid,其中 grid[i][j] 代表一个需要整理的格子。整理师自 grid[0][0] 开始 逐行逐列 地整理每个格子。 整理规则为:在整理过程中&am…...

短视频ai剪辑分发账号矩阵系统(招商oem)----源头技术开发
短视频ai剪辑分发账号矩阵系统 1. 视频剪辑工具——原创短视频一键生成,视频剪辑亮点分析 (1)多模式智能剪辑 包含智能混剪逻辑、智能组合、场景顺序、图片生成视频等多种模式。在视频创作上也做了简化,即使是没有剪辑能力的创…...

Ubuntu18.04安装Loam保姆级教程
系统环境:Ubuntu18.04.6 LTS 1.Loam的安装前要求: 1.1 ROS安装:参考我的另一篇博客 Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客还是那句话,有时候加了这行也不好使,我是疯狂试了20次…...
Rust 语言中的结构体
目录 1、结构体 2、结构体的定义和实例化 2.1 使用字段初始化简写语法 2.2 使用结构体更新语法从其他实例创建实例 2.3 没有命名字段的元组结构体 2.4 没有任何字段的类单元结构体 2.5 结构体示例程序 3、方法 3.1 关联函数 3.2 多个 impl 块 1、结构体 struct&…...
Unity开发之C#基础-异常处理(Try Catch)
前言 其实本来这章应该将栈和队列的 但是后来想想 栈和队列在实际应用很少跟多的是大家了解一下栈和队列的基本常识比如先进先出的是谁后进先出的是谁这种 csdn有很多介绍栈和队列的文章 我觉得都比我理解深刻所以大家可以去搜索参照一下 今天我们继续往下讲解 如何自己主动的…...

Epoxy:跨不同数据存储的 ACID 事务
Epoxy 利用 Postgres 事务数据库作为主数据库/协调数据库,并扩展多版本并发控制 (MVCC) 以实现跨数据存储隔离。它通过乐观并发控制 (OCC) 和两阶段提交 (2PC) 协议提供隔离性以及原子性和持久性。 环氧树脂被用作五种不同数据存储的接口层:Postgres, M…...

鸿蒙:从0到“Hello Harmony”
效果展示 一.概述 明年华为鸿蒙就不再兼容Android生态了,作为拥有7亿终端用户的华为,建立自己的生态也是理所当然。 所以对HarmonyOS的研究也是众多开发者绕不开的坎了。 今天这篇博文主要实现一个“Hello Harmony!”的Demo。 二.官方链接…...

PyTorch神经网络初始化实战:解决梯度消失、对称性陷阱与LSTM失谐
神经网络初始化看似只是模型训练前的一个“小动作”,但我在带团队做工业级视觉检测项目时,亲眼见过三次因初始化不当导致的全线返工:一次是产线缺陷识别模型在验证集上准确率突然掉到42%,查了三天才发现权重全初始化为0.1…...

5分钟掌握NoFences:告别杂乱桌面的免费桌面整理终极指南
5分钟掌握NoFences:告别杂乱桌面的免费桌面整理终极指南 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 你是否每天都要面对一个布满杂乱图标的Windows桌面&#…...

windows VS工具判断动态库是32位还是64位
dumpbin /headers yourfile.dll | findstr "machine"...

华实展厅出圈!大自然标识匠心打造,目视化呈现基建巨头的实力底气
当建筑的厚重与视觉的美感碰撞,当企业的成长与科技的便捷融合,华实建设集团企业展厅——由专业的长沙市大自然标识设计制作公司倾力打造,不仅是品牌形象的“窗口”,更是实力与文化的“立体名片”。长沙市大自然标识设计制作有限公…...

FFXIV国际服汉化终极指南:三步实现中文界面完美体验
FFXIV国际服汉化终极指南:三步实现中文界面完美体验 【免费下载链接】FFXIVChnTextPatch 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIVChnTextPatch 还在为《最终幻想XIV》国际服的英文界面而烦恼吗?想要享受国际服丰富内容却苦于语言障碍…...

初次使用taotoken模型广场进行模型选型与对比试用的直观体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初次使用Taotoken模型广场进行模型选型与对比试用的直观体验 对于需要接入大模型能力的开发者或团队而言,面对市场上众…...

解锁KDE桌面美学:Lightly主题隐藏配置选项完全指南 [特殊字符]
解锁KDE桌面美学:Lightly主题隐藏配置选项完全指南 🎨 【免费下载链接】Lightly A modern style for qt applications. 项目地址: https://gitcode.com/gh_mirrors/lig/Lightly Lightly是一个基于Breeze主题的现代化、简约风格KDE主题,…...

【限时解密】全球仅12家旅游公司跑通的AI Agent冷启动模型:含私有知识库构建SOP
更多请点击: https://codechina.net 第一章:【限时解密】全球仅12家旅游公司跑通的AI Agent冷启动模型:含私有知识库构建SOP 在旅游行业AI落地实践中,“冷启动难”长期制约Agent规模化部署——93%的试点项目因知识断层、意图歧义…...
:新建一个flutter项目)
【Flutter3.8x】flutter从入门到实战基础教程(一):新建一个flutter项目
初始化项目步骤 vscode中安装flutter插件ctrlshiftp弹出命令框点击flutter:new project系统会自动生成一个项目,其中会让选择一个文件夹存放源码,自行选择就行 启动安卓模拟器把文件定位在main.dart上,然后再点击这里如果启动失败,…...

Lindy元数据驱动自动化:如何用1个Schema定义自动生成8类分析任务+监控看板
更多请点击: https://intelliparadigm.com 第一章:Lindy元数据驱动自动化:核心理念与架构全景 Lindy元数据驱动自动化并非传统脚本编排的增强版,而是一种以“元数据即契约”为哲学基础的系统性范式。其核心理念在于:…...