Ubuntu18.04安装Loam保姆级教程
系统环境:Ubuntu18.04.6 LTS
1.Loam的安装前要求:
1.1 ROS安装:参考我的另一篇博客
Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客还是那句话,有时候加了这行也不好使,我是疯狂试了20+次,最后打了一局游戏,回来就过了,这就得看网络看命了,不行就在网上搜搜终极大招(动手能力差的不建议)。有时候加了这行也不好使,我是疯狂试了10+次,出现3.3之后就能用了,这就得看网络看命了,不行就在网上搜搜终极大招(动手能力差的不建议)。多试几十次,不行几百次,换手机网络也是,多试几次,这东西很玄学,不一定哪次就过了。多试几十次,不行几百次,换手机网络也是,多试几次,这东西很玄学,不一定哪次就过了。1.1.设置sources.list。https://blog.csdn.net/qq_23473839/article/details/131719477
1.2 PCL安装:
Ubuntu18.04安装PCL保姆级教程_灬杨三岁灬的博客-CSDN博客Ubuntu18.04安装PCL保姆级教程https://blog.csdn.net/qq_23473839/article/details/132128455?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22132128455%22%2C%22source%22%3A%22qq_23473839%22%7D
2.安装:
2.1.建立catkin工作空间(我取名为catkin_loam_velodyne)
2.2.建立src文件夹
2.3.编译
cd ~/catkin_loam_velodyne/src/
git clone https://github.com/laboshinl/loam_velodyne.git
cd ~/catkin_loam_velodyne
catkin_make -DCMAKE_BUILD_TYPE=Release 3.编译出现的问题:
3.1.找不到pcl_conversions:
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "pcl_conversions"
with any of the following names:
pcl_conversionsConfig.cmake
pcl_conversions-config.cmake
Add the installation prefix of "pcl_conversions" to CMAKE_PREFIX_PATH or
set "pcl_conversions_DIR" to a directory containing one of the above files.
If "pcl_conversions" provides a separate development package or SDK, be
sure it has been installed.
Call Stack (most recent call first):
loam_velodyne/CMakeLists.txt:4 (find_package)
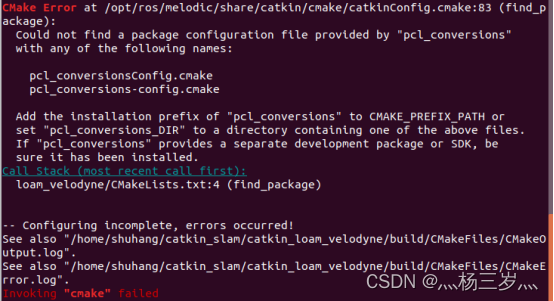
原因:缺少某些库
解决办法:
sudo apt-get install libvtk6-jni
sudo apt-get install libvtk6-java
sudo apt-get install libvtk6-dev
sudo apt-get install libvtk6-qt-dev
sudo apt-get install libpcl-dev
sudo apt-get install ros-melodic-pcl-conversions
sudo apt-get install ros-melodic-pcl-ros
sudo apt-get install ros-melodic-navigation以下代码只针对Ubuntu18.04对应的ROS melodic版本,其余版本可将代码中melodic自行替换为相应的版本。
4.运行Loam:
Shell1:
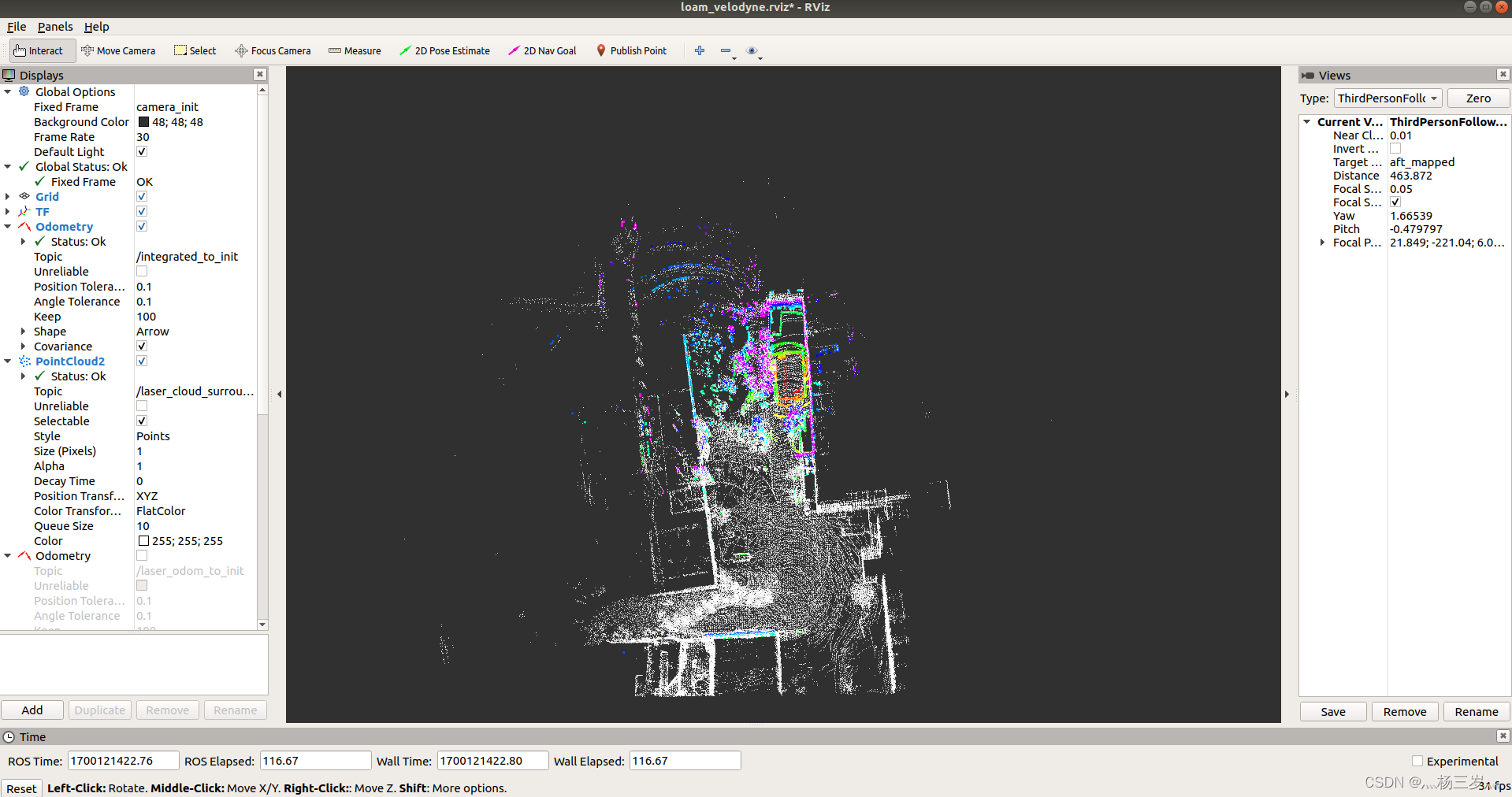
source ~/catkin_slam/catkin_loam_velodyne/devel/setup.bashroslaunch loam_velodyne loam_velodyne.launchShell2:(跑Loam的数据集)
rosbag play ~/Dataset/A-LOAM/nsh_indoor_outdoor.bag结果:
5.运行出现的问题:
5.1.找不到package路径:
ERROR: cannot launch node of type [loam_velodyne/multiScanRegistration]: Cannot locate node of type [multiScanRegistration] in package [loam_velodyne]. Make sure file exists in package path and permission is set to executable (chmod +x)
ERROR: cannot launch node of type [loam_velodyne/laserOdometry]: Cannot locate node of type [laserOdometry] in package [loam_velodyne]. Make sure file exists in package path and permission is set to executable (chmod +x)
ERROR: cannot launch node of type [loam_velodyne/laserMapping]: Cannot locate node of type [laserMapping] in package [loam_velodyne]. Make sure file exists in package path and permission is set to executable (chmod +x)
ERROR: cannot launch node of type [loam_velodyne/transformMaintenance]: Cannot locate node of type [transformMaintenance] in package [loam_velodyne]. Make sure file exists in package path and permission is set to executable (chmod +x)
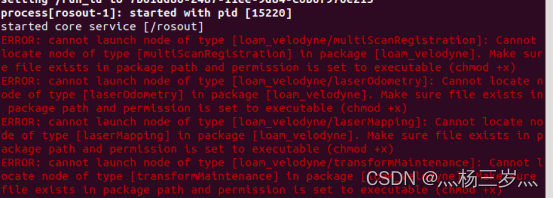
原因:编译的时候devel/lib没生成对应文件
解决办法:删除build和devel文件夹,重新编译即可
5.2.线程down掉
[multiScanRegistration-2] process has died [pid 5419, exit code -11, cmd /home/shuhang/catkin_slam/catkin_loam_velodyne/devel/lib/loam_velodyne/multiScanRegistration /multi_scan_points:=/velodyne_points __name:=multiScanRegistration __log:=/home/shuhang/.ros/log/8ec97a84-24a3-11ee-a67c-49f24c8dffb1/multiScanRegistration-2.log].
log file: /home/shuhang/.ros/log/8ec97a84-24a3-11ee-a67c-49f24c8dffb1/multiScanRegistration-2*.log

原因:本人后来重装Ubuntu就暂时没有这个问题了,怀疑是PCL版本不匹配的问题
解决办法:卸载PCL并重装
第一次装Loam的时候各种问题,装PCL的时候也是各种问题。重装Ubuntu后安装PCL极其顺利,Loam也极其顺利。如果Loam编译和运行很艰难,多半是PCL的问题。
相关文章:
Ubuntu18.04安装Loam保姆级教程
系统环境:Ubuntu18.04.6 LTS 1.Loam的安装前要求: 1.1 ROS安装:参考我的另一篇博客 Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客还是那句话,有时候加了这行也不好使,我是疯狂试了20次…...
Rust 语言中的结构体
目录 1、结构体 2、结构体的定义和实例化 2.1 使用字段初始化简写语法 2.2 使用结构体更新语法从其他实例创建实例 2.3 没有命名字段的元组结构体 2.4 没有任何字段的类单元结构体 2.5 结构体示例程序 3、方法 3.1 关联函数 3.2 多个 impl 块 1、结构体 struct&…...
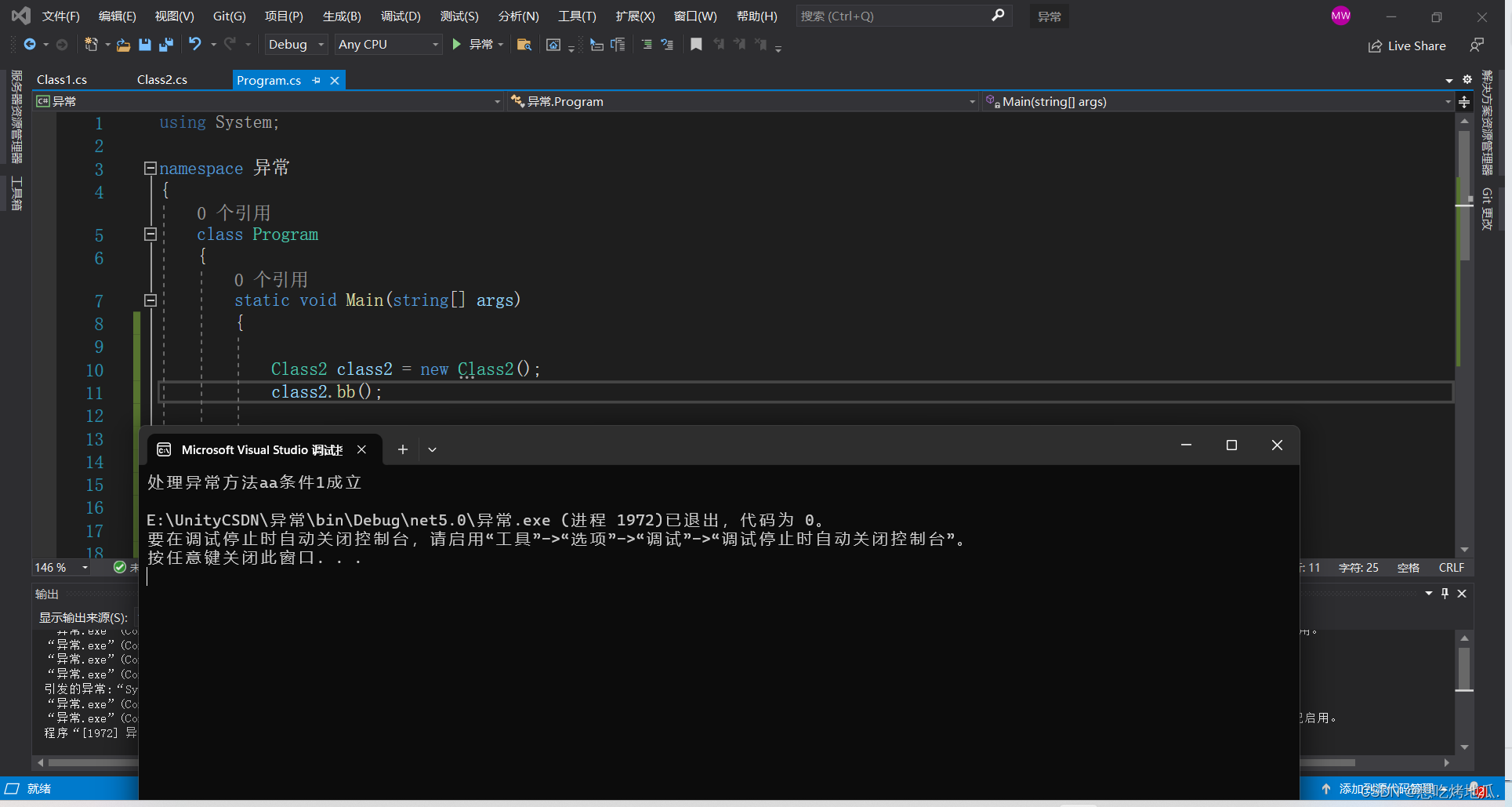
Unity开发之C#基础-异常处理(Try Catch)
前言 其实本来这章应该将栈和队列的 但是后来想想 栈和队列在实际应用很少跟多的是大家了解一下栈和队列的基本常识比如先进先出的是谁后进先出的是谁这种 csdn有很多介绍栈和队列的文章 我觉得都比我理解深刻所以大家可以去搜索参照一下 今天我们继续往下讲解 如何自己主动的…...

Epoxy:跨不同数据存储的 ACID 事务
Epoxy 利用 Postgres 事务数据库作为主数据库/协调数据库,并扩展多版本并发控制 (MVCC) 以实现跨数据存储隔离。它通过乐观并发控制 (OCC) 和两阶段提交 (2PC) 协议提供隔离性以及原子性和持久性。 环氧树脂被用作五种不同数据存储的接口层:Postgres, M…...

鸿蒙:从0到“Hello Harmony”
效果展示 一.概述 明年华为鸿蒙就不再兼容Android生态了,作为拥有7亿终端用户的华为,建立自己的生态也是理所当然。 所以对HarmonyOS的研究也是众多开发者绕不开的坎了。 今天这篇博文主要实现一个“Hello Harmony!”的Demo。 二.官方链接…...
istio安装文档
1、重装命令 istioctl manifest generate --set profiledemo | kubectl delete --ignore-not-foundtrue -f - 2、下载 参考:02、istio部署到k8s中 - 简书 (jianshu.com) 参考 Istio / 入门 curl -L https://istio.io/downloadIstio | ISTIO_VERSION1.20.0 TAR…...

修改CentOS默认mail发件人名称
修改CentOS默认mail发件人名称 在CentOS中,可以通过修改邮件发送配置文件来修改默认的邮件发件人名称。以下是一些步骤,您可以根据您的实际情况进行修改: 打开终端或SSH连接到CentOS服务器。使用文本编辑器(如vi或nano࿰…...
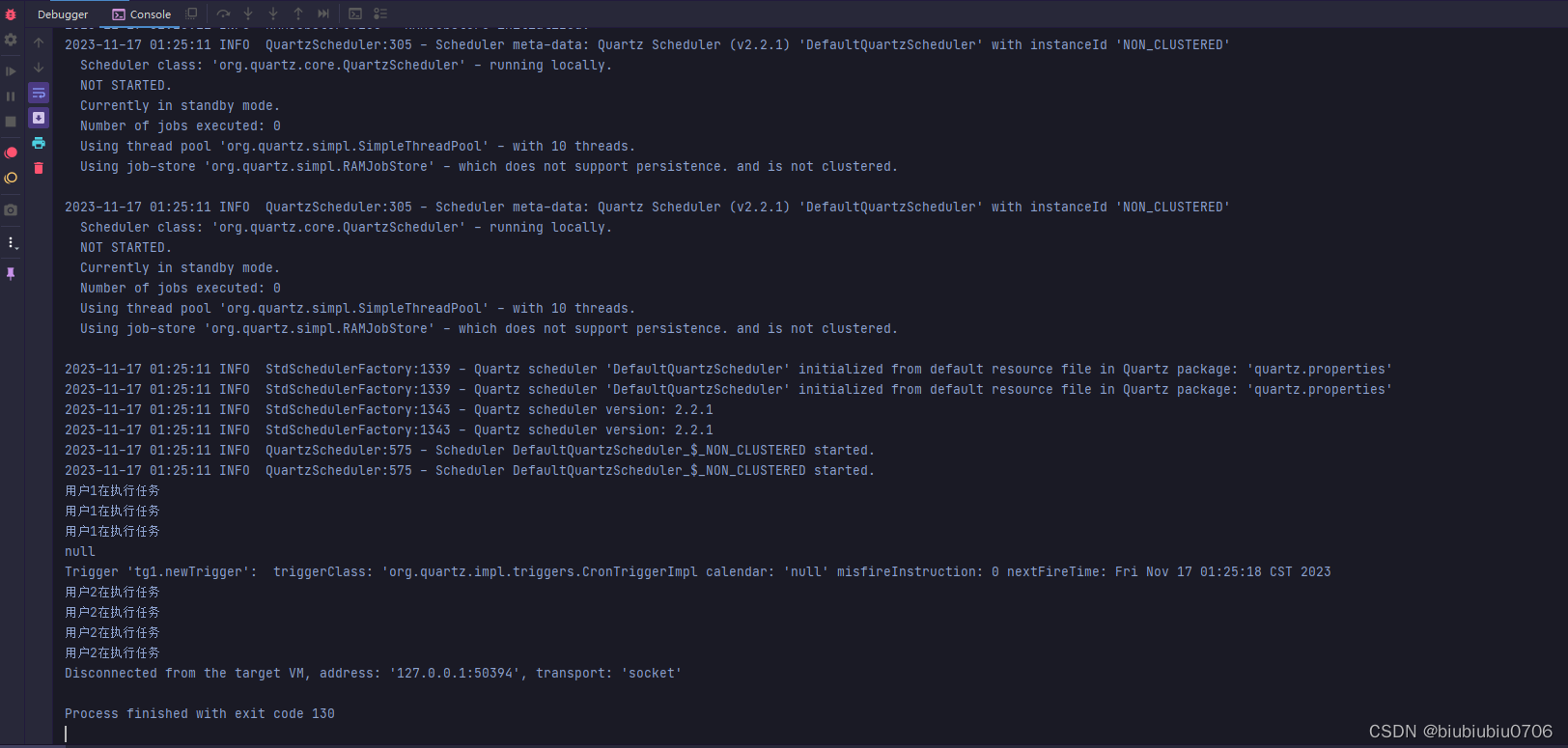
Trigger替换Demo
maven工程 pom依赖 <dependency><groupId>org.quartz-scheduler</groupId><artifactId>quartz</artifactId><version>2.2.1</version> </dependency> import org.quartz.Job; import org.quartz.JobExecutionContext; imp…...
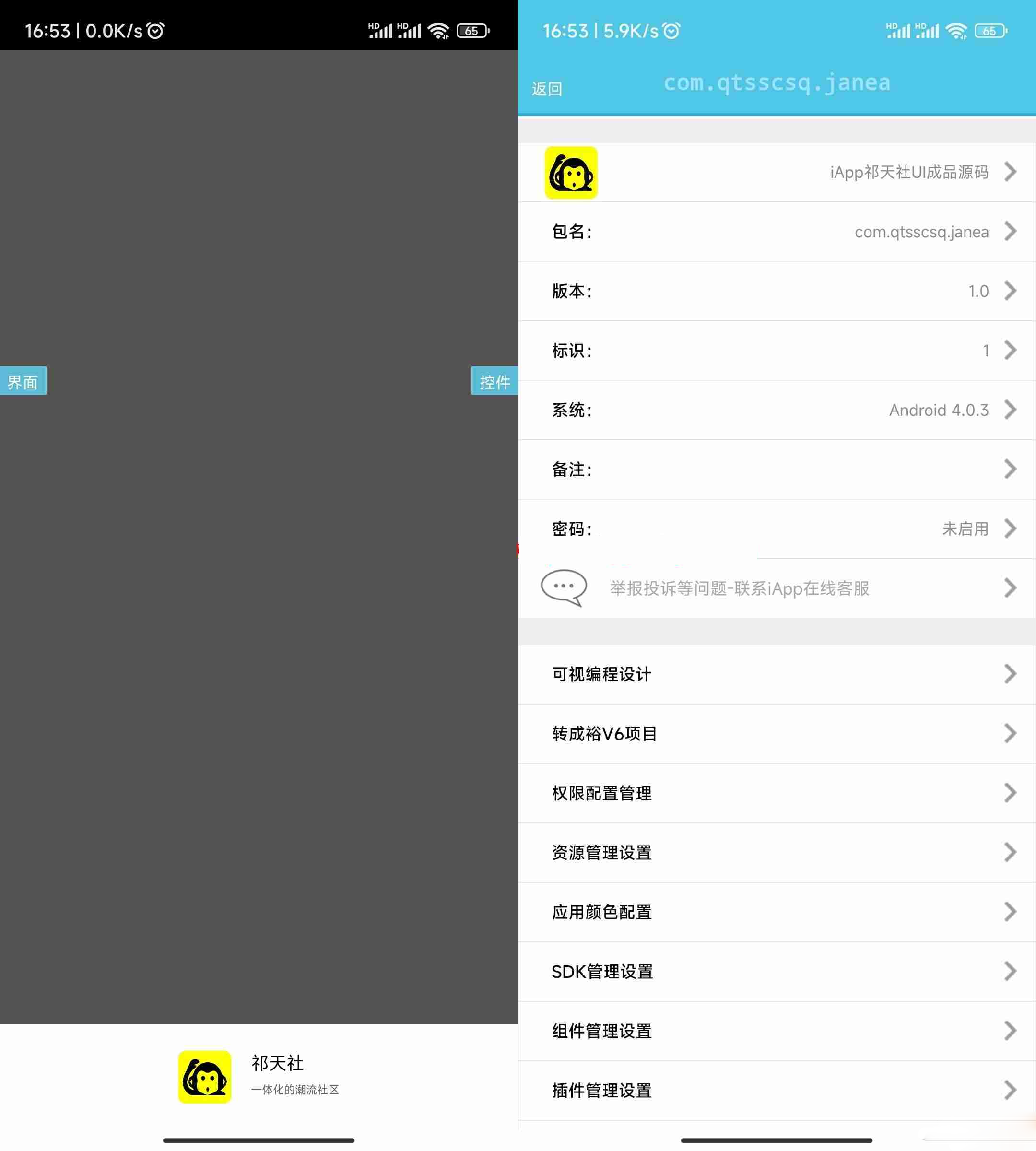
iApp祁天社区UI成品源码 功能齐全的社区应用
iApp祁天社区UI成品源码是一个非常实用的资源,提供了完整的源代码,可以帮助您快速搭建一个功能齐全的社区应用。 这个源码具有丰富的UI设计,经过精心调整和优化,确保用户体验流畅而舒适。它不仅具备基本的社区功能,如…...

python基于BAC0库进行bacnet IP的读写
python基于BAC0库进行bacnet IP的读写 实现内容:基于BAC0库实现对一台虚拟bacnet设备的扫描、点位读取和点位数据写入。 开发环境 python3.9 pip下载BAC0库 功能实现 # 扫描设备myIPAddr 192.168.90.81/24bacnet BAC0.lite(ipmyIPAddr)devices bacnet.whois(…...
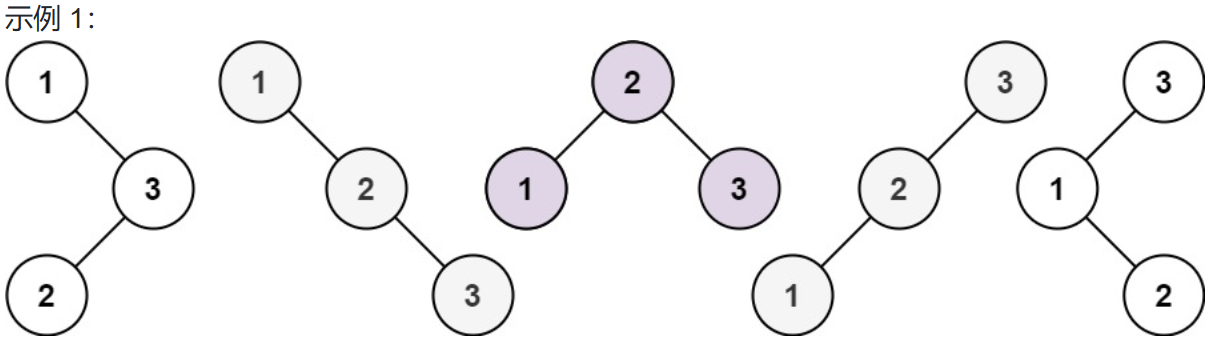
CSDN每日一题学习训练——Python版(简化路径,不同的二叉搜索树)
版本说明 当前版本号[20231116]。 版本修改说明20231116初版 目录 文章目录 版本说明目录简化路径题目解题思路代码思路参考代码 不同的二叉搜索树题目解题思路代码思路参考代码 简化路径 题目 给你一个字符串 path ,表示指向某一文件或目录的 Unix 风格 绝对路…...

milvus集合管理
一、创建集合 集合由一个或多个分区组成。在创建新集合时,Milvus会创建一个默认分区_default 1.准备模式 需要创建的集合必须包含一个主键字段和一个向量字段。INT64和String是主键字段支持的数据类型。 首先,准备必要的参数,包括字段模式、…...
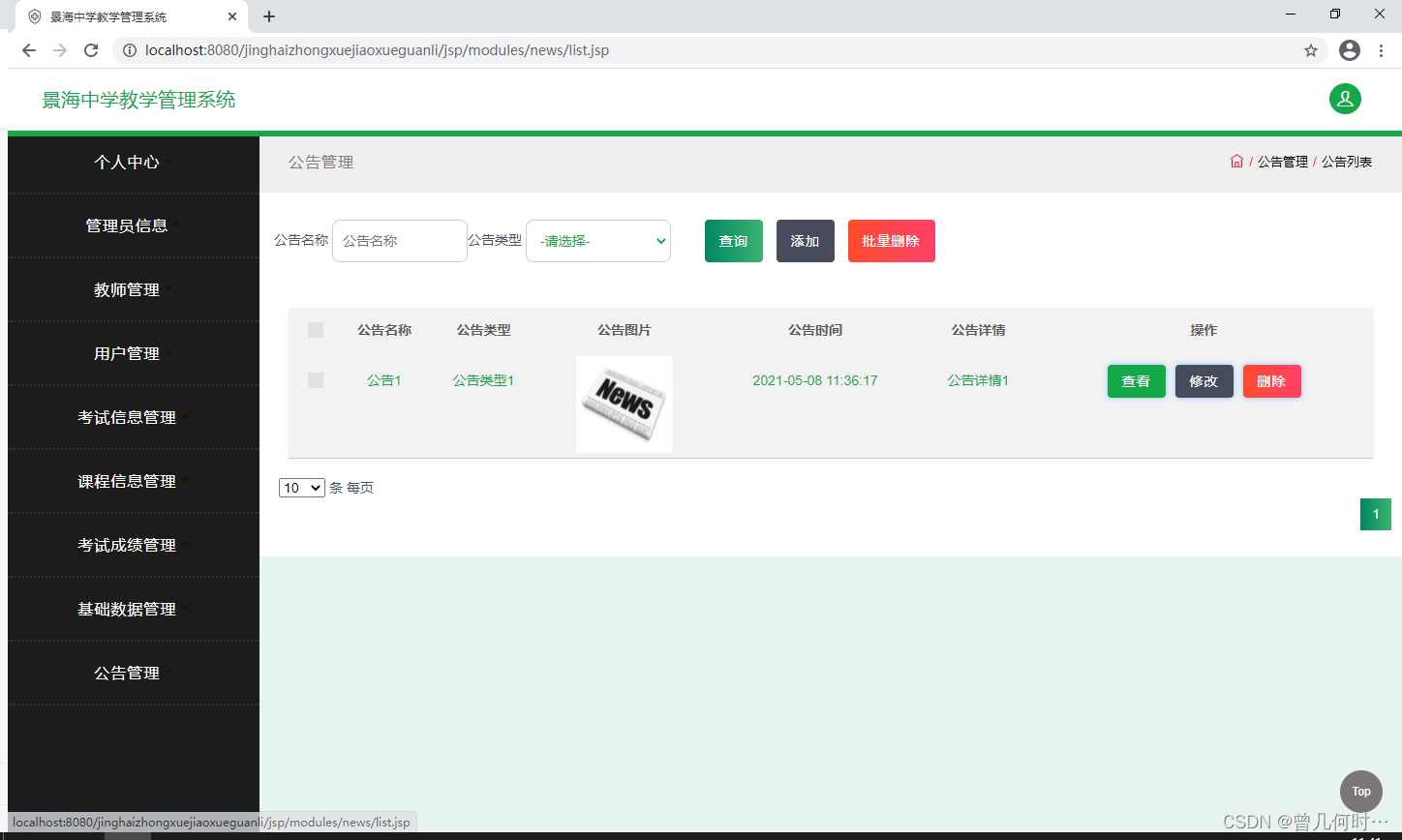
基于SSM的教学管理系统设计与实现
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:采用JSP技术开发 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目&#x…...
【第2章 Node.js基础】2.7 Node.js 的流(一)可写流
🌈可写流 🚀什么是可写流 可写流是对数据被写入的目的地的一种抽象。 所有可写流都实现了 stream.Writable类定义的接口。 可写流的例子包括,也都是实现了可写流接口的双工流 客户端的 HTTP 请求、服务器的HTTP 响应、fs 的写入流、zlib…...
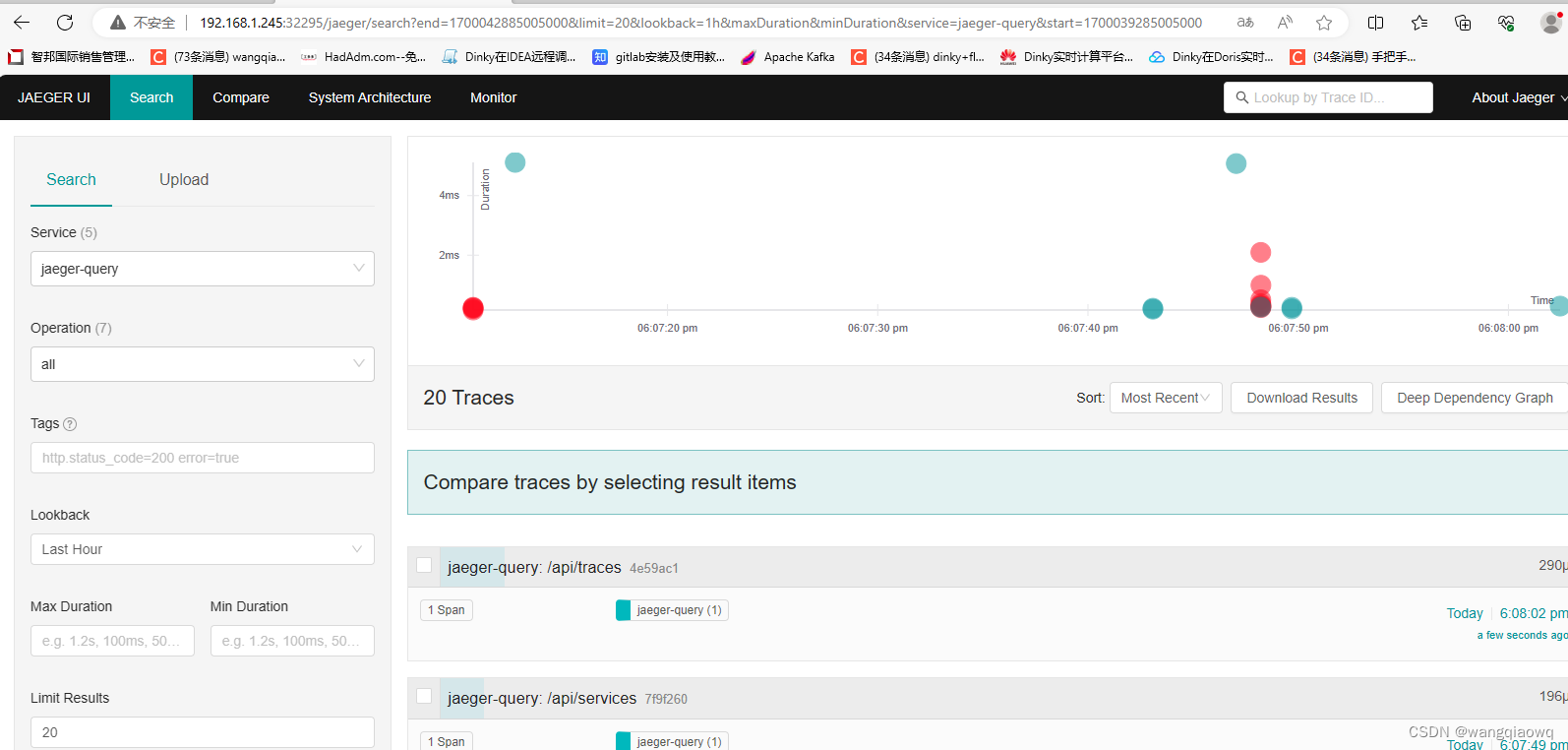
【kerberos】使用 curl 访问受 Kerberos HTTP SPNEGO 保护的 URL
前言: 大数据集群集成 Kerberos 后,很多 WEBUI 打开都会提示输入用户名和密码。由于我想获取 flink 任务的详情,且KNOX 并不支持Flink api,查看KNOX 直接的列表:https://docs.cloudera.com/cdp-private-cloud-base/7.…...
基于SSM的智慧养老平台设计与实现
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:采用JSP技术开发 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目&#x…...
图像生成colab集合
不过colab会做检测,一般文生图算法是基本很难跑起来的。 https://github.com/camenduruhttps://github.com/camenduru这哥们有很多colab。 1.stable-diffusion-webui https://colab.research.google.com/drive/1Iy-xW9t1-OQWhb0hNxueGij8phCyluOh#scrollTow3KNZ-…...
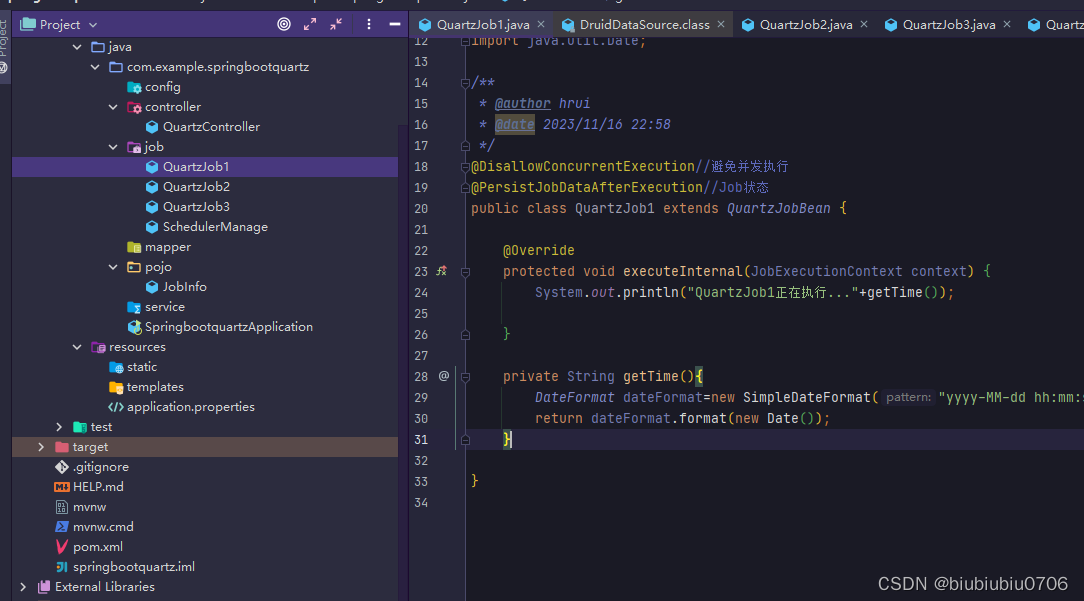
SpringBoot整合Quartz示例
数据表 加不加无所谓,如果需要重启服务器后重新执行所有JOB就把sql加上 如果不加表 将application.properties中的quartz数据库配置去掉 自己执行自己的逻辑来就好,大不了每次启动之后重新加载自己的逻辑 链接:https://pan.baidu.com/s/1KqOPYMfI4eHcEMxt5Bmt…...

物联网AI MicroPython学习之语法 I2C总线
学物联网,来万物简单IoT物联网!! I2C 介绍 模块功能: I2C Master设备驱动 接口说明 I2C - 构建硬件I2C对象 函数原型:I2C(id, scl, sda, freq)参数说明: 参数类型必选参数?说明idintYI2C外设ÿ…...

RocketMQ的适用场景有哪些?
程序员的公众号:源1024,获取更多资料,无加密无套路! 最近整理了一波电子书籍资料,包含《Effective Java中文版 第2版》《深入JAVA虚拟机》,《重构改善既有代码设计》,《MySQL高性能-第3版》&…...

昇腾CANN cmake:CANN 项目的 CMake 构建模块实战
从 ops-nn 到 cann-recipes-*,几乎所有 CANN 开源仓库都用 CMake 做构建系统。cann-cmake 仓库提供一套标准的 CMake 模块——FindCANN.cmake(找到 CANN 安装路径)、AscendCCore.cmake(Ascend C 编译规则)、AscendKern…...

Claude API文档不是说明书,而是契约:用Swagger UI+Postman Collection+TypeScript SDK三件套构建零歧义协作协议
更多请点击: https://kaifayun.com 第一章:Claude API文档不是说明书,而是契约 Claude API 文档的本质并非操作指南或功能速查手册,而是一份具有技术约束力的**双向契约**——它明确定义了客户端与 Anthropic 服务之间在请求结构…...

boss app sig/sp/响应体 unidbg分析
声明 本文章中所有内容仅供学习交流使用,不用于其他任何目的,抓包内容、敏感网址、数据接口等均已做脱敏处理,严禁用于商业用途和非法用途,否则由此产生的一切后果均与作者无关! 侵权通过头像私信或名字简介叫我删除博…...

当 SonarQube 遇见 Go:从零搭建自动化代码质量检测体系
继 gofmt、golangci-lint、go test -race 之后,SonarQube 成为 Go 工程化质量保障体系的第四块拼图 在上一篇文章中,我们详细梳理了 gofmt + golangci-lint + go test -race 这套原生工具链的审查体系。这套组合拳在代码风格统一、静态分析和数据竞争检测方面表现出色,但细心…...

Shutter Encoder:构建高效媒体工作流的FFmpeg图形化解决方案
Shutter Encoder:构建高效媒体工作流的FFmpeg图形化解决方案 【免费下载链接】shutter-encoder A professional video compression tool accessible to all, mostly based on FFmpeg. 项目地址: https://gitcode.com/gh_mirrors/sh/shutter-encoder 在数字媒…...

PINN赋能QSAR:用物理约束提升分子性质预测泛化能力
1. 项目概述:当物理规律成为神经网络的“校准尺”你有没有试过训练一个深度学习模型去预测某种新型有机分子的沸点,结果模型在训练集上误差小得惊人,一拿到实验室刚测出来的三个新样本,预测值就偏了40℃?或者用传统QSA…...

5分钟掌握SVGnest:免费开源矢量嵌套工具,让材料切割效率提升80%
5分钟掌握SVGnest:免费开源矢量嵌套工具,让材料切割效率提升80% 【免费下载链接】SVGnest An open source vector nesting tool 项目地址: https://gitcode.com/gh_mirrors/sv/SVGnest SVGnest是一款完全免费且开源的自动嵌套应用程序,…...

从实战出发:聊聊Serial口静态路由在老旧网络设备迁移中的那些事儿
从实战出发:聊聊Serial口静态路由在老旧网络设备迁移中的那些事儿 第一次在机房里见到那台积满灰尘的Cisco 1841时,我差点以为这是个博物馆展品。但客户坚持说这台服役超过15年的老伙计承载着他们最重要的生产线控制数据,任何闪失都可能造成六…...
)
Codex CLI 接 Gemini 3.5 Flash 实测:代码生成、推理速度、价格三维度横评(2026)
上周 Google 发了 Gemini 3.5 Flash,我当天晚上就拿 Codex CLI 接上跑了几个项目里的真实任务。原因很简单——我们团队最近 token 开销涨得太快,老板让我找个"又快又便宜还不太拉胯"的模型顶日常编码场景。Claude Sonnet 4.6 质量没话说但贵&…...

5G FWA智能终端技术解析:从核心原理到部署实践
1. 项目背景与行业意义最近在圈子里看到一则消息,美格智能的5G FWA智能终端产品成功中标了中国联通的招标项目。这消息乍一看像是普通的商业新闻,但对于我们这些常年泡在通信和物联网领域的人来说,这背后其实藏着不少值得琢磨的门道。它不仅仅…...