【ROS导航Navigation】五 | 导航相关的消息 | 地图 | 里程计 | 坐标变换 | 定位 | 目标点和路径规划 | 激光雷达 | 相机
致谢:ROS赵虚左老师
Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
参考赵虚左老师的实战教程

一、地图
nav_msgs/MapMetaData
- 地图元数据,包括地图的宽度、高度、分辨率等。
nav_msgs/OccupancyGrid
- 地图栅格数据,一般会在rviz中以图形化的方式显示。
1.nav_msgs/MapMetaData
time map_load_time
float32 resolution #地图分辨率
uint32 width #地图宽度
uint32 height #地图高度
geometry_msgs/Pose origin #地图位姿数据geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
2.nav_msgs/OccupancyGrid
std_msgs/Header headeruint32 seqtime stampstring frame_id
#--- 地图元数据
nav_msgs/MapMetaData infotime map_load_timefloat32 resolutionuint32 widthuint32 heightgeometry_msgs/Pose origingeometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
#--- 地图内容数据,数组长度 = width * height
int8[] data
二、里程计
里程计相关消息是:nav_msgs/Odometry,调用rosmsg info nav_msgs/Odometry 显示消息内容如下:
std_msgs/Header headeruint32 seqtime stampstring frame_id
string child_frame_id
geometry_msgs/PoseWithCovariance posegeometry_msgs/Pose pose #里程计位姿geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 wfloat64[36] covariance
geometry_msgs/TwistWithCovariance twistgeometry_msgs/Twist twist #速度geometry_msgs/Vector3 linearfloat64 xfloat64 yfloat64 zgeometry_msgs/Vector3 angularfloat64 xfloat64 yfloat64 z # 协方差矩阵float64[36] covariance
三、坐标变换
坐标变换相关消息是: tf/tfMessage,调用rosmsg info tf/tfMessage 显示消息内容如下:
geometry_msgs/TransformStamped[] transforms #包含了多个坐标系相对关系数据的数组std_msgs/Header headeruint32 seqtime stampstring frame_idstring child_frame_idgeometry_msgs/Transform transformgeometry_msgs/Vector3 translationfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion rotationfloat64 xfloat64 yfloat64 zfloat64 w
四、定位
定位相关消息是:geometry_msgs/PoseArray,调用rosmsg info geometry_msgs/PoseArray显示消息内容如下:
std_msgs/Header headeruint32 seqtime stampstring frame_id
geometry_msgs/Pose[] poses #预估的点位姿组成的数组geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
五、目标点
目标点相关消息是:move_base_msgs/MoveBaseActionGoal,调用rosmsg info move_base_msgs/MoveBaseActionGoal显示消息内容如下:
1.move_base_msgs/MoveBaseActionGoal
std_msgs/Header headeruint32 seqtime stampstring frame_id
actionlib_msgs/GoalID goal_idtime stampstring id
move_base_msgs/MoveBaseGoal goalgeometry_msgs/PoseStamped target_posestd_msgs/Header headeruint32 seqtime stampstring frame_idgeometry_msgs/Pose pose #目标点位姿geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
路径规划相关消息是:nav_msgs/Path,调用rosmsg info nav_msgs/Path显示消息内容如下:
2.nav_msgs/Path
std_msgs/Header headeruint32 seqtime stampstring frame_id
geometry_msgs/PoseStamped[] poses #由一系列点组成的数组std_msgs/Header headeruint32 seqtime stampstring frame_idgeometry_msgs/Pose posegeometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
六、激光雷达
激光雷达相关消息是:sensor_msgs/LaserScan,调用rosmsg info sensor_msgs/LaserScan显示消息内容如下:
std_msgs/Header headeruint32 seqtime stampstring frame_id
float32 angle_min #起始扫描角度(rad)
float32 angle_max #终止扫描角度(rad)
float32 angle_increment #测量值之间的角距离(rad)
float32 time_increment #测量间隔时间(s)
float32 scan_time #扫描间隔时间(s)
float32 range_min #最小有效距离值(m)
float32 range_max #最大有效距离值(m)
float32[] ranges #一个周期的扫描数据
float32[] intensities #扫描强度数据,如果设备不支持强度数据,该数组为空
七、相机
深度相机相关消息有:sensor_msgs/Image、sensor_msgs/CompressedImage、sensor_msgs/PointCloud2
sensor_msgs/Image 对应的一般的图像数据,sensor_msgs/CompressedImage 对应压缩后的图像数据,sensor_msgs/PointCloud2 对应的是点云数据(带有深度信息的图像数据)。
调用rosmsg info sensor_msgs/Image显示消息内容如下:
(更新ing)
2023.11.16
渝北仙桃数据谷
相关文章:
【ROS导航Navigation】五 | 导航相关的消息 | 地图 | 里程计 | 坐标变换 | 定位 | 目标点和路径规划 | 激光雷达 | 相机
致谢:ROS赵虚左老师 Introduction Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 参考赵虚左老师的实战教程 一、地图 nav_msgs/MapMetaData 地图元数据,包括地图的宽度、高度、分辨率等。 nav_msgs/OccupancyGrid 地图栅格数据&#…...

什么是脏读、不可重复读、幻读讲解
数据库隔离级别是数据库管理系统中一个重要的概念,它定义了事务之间的可见性和影响。在多用户并发访问数据库时,隔离级别能够确保事务之间的相互独立性,避免数据不一致的问题。本文将深入探讨三种常见的并发问题:脏读、不可重复读…...
2018年五一杯数学建模C题江苏省本科教育质量综合评价解题全过程文档及程序
2019年五一杯数学建模 C题 江苏省本科教育质量综合评价 原题再现 随着中国的改革开放,国家的综合实力不断增强,中国高等教育发展整体已进入世界中上水平。作为一个教育大省,江苏省的本科教育发展在全国名列前茅,而江苏省13个地级…...

第四代智能井盖传感器:万宾科技助力城市安全
在繁华喧嚣的城市里人来人往,井盖作为基础设施的一个组成部分在路面上分布范围广。然而这些看似普通的井盖却存在着位移、水浸的风险,可能给我们的生活带来诸多不便,更会威胁到我们的人身安全。如何有效监测和管理井盖的状态,成为…...

[Jenkins] Docker 安装Jenkins及迁移流程
系统要求 最低推荐配置: 256MB可用内存1GB可用磁盘空间(作为一个Docker容器运行jenkins的话推荐10GB) 为小团队推荐的硬件配置: 1GB可用内存50 GB 可用磁盘空间 软件配置: Java 8—无论是Java运行时环境(JRE)还是Java开发工具包(JDKÿ…...

第七篇 基于JSP 技术的网上购书系统——新品上架、推荐产品、在线留言、搜索功能实现(网上商城、仿淘宝、当当、亚马逊)
目录 1.新品上架 1.1功能说明 1.2界面设计 1.3处理流程 1.4数据来源和算法 1.4.1数据来源 1.4.2查询条件 1.4.3表间关系 1.4.4相关sql实例 2.推荐产品 2.1功能说明 2.2界面设计 2.3处理流程 2.4数据来源和算法 2.4.1数据来源 2.4.2查询条件 2.4.3表间关…...
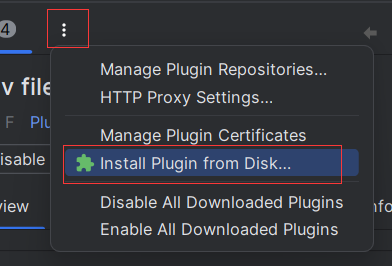
IntelliJ IDE 插件开发 |(一)快速入门
前言 IntelliJ IDEA 作为 Java 开发的首选 IDE,其强大、方便之处不必多说。不过,由于个人或者团队的个性化需求,我们或多或少会想对其功能进行拓展,这时就需要开发插件(在 IntelliJ 平台下的所有 IDE 均可运行&#x…...
【Ubuntu】Windows远程Ubuntu系统
步骤 开启ssh服务并开放22端口关闭防火墙ufw或iptables ;或者将远程端口添加到入站与出站规则安装xrdp并将xrdp用户添加到ssl-cert用户组mstsc 远程,输入账号密码 1、开启ssh服务 1.1. 查看ssh是否已经开启 sudo ps -e | grep ssh如果最后返回是sshd…...

pipeline jenkins流水线
Pipeline 是 Jenkins 中一种灵活且强大的工作流机制,它允许您以代码的形式来定义和管理持续集成和持续交付的流程。 Pipeline 的作用主要体现在以下几个方面: 可编排的构建流程:使用 Pipeline,您可以将一个或多个阶段(…...
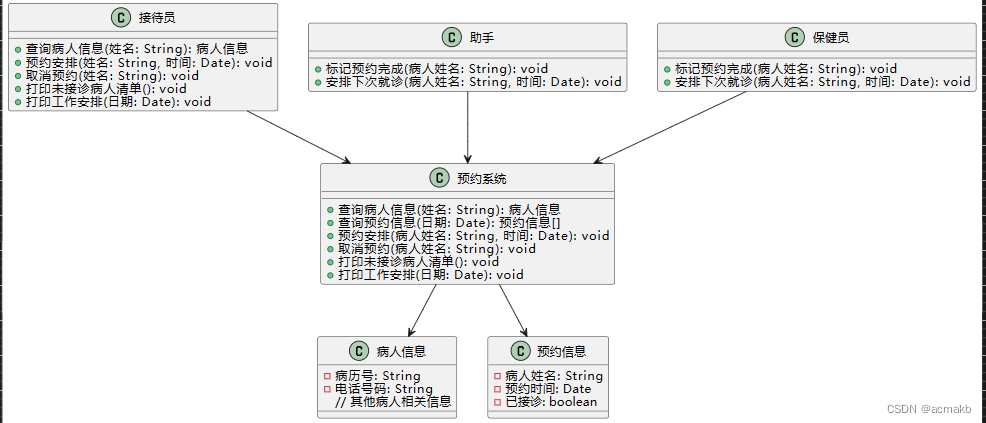
软件工程理论与实践 (吕云翔) 第六章 面向对象分析课后习题及其解析
第六章 面向对象分析 知识点: 一个典型的软件系统通常包括的内容为:它使用数据结构(对象模型),执行操作(动态模型),并且完成数据值的变化(功能模型)。 3种模型之间的关…...

langchain(1):使用LangChain 调用 openai 的 text/chat model
文章目录 重要参考OPENAI API调用 Text 模型调用 Chat 模型消息角色 Chat 模型 vs Text 模型 通过 LangChain 调用 Text 和 Chat 模型调用 text 模型调用 chat 模型 重要参考 langchain 中文网 langchain api openai api 文档 huggingface LangChain 是一个全方位的、基于大…...
rabbitMQ的扇出模式(fanout发布订阅)的生产者与消费者使用案例
扇出模式 fanout 发布订阅模式 生产者 生产者发送消息到交换机(logs),控制台输入消息作为生产者的消息发送 package com.esint.rabbitmq.work03;import com.esint.rabbitmq.RabbitMQUtils; import com.rabbitmq.client.Channel;import java.util.Scanne…...

VSCode打开Json 文件格式化
在VSCode中打开JSON文件时,你可以使用以下步骤来格式化JSON并显示为多行: 使用快捷键: 在打开的JSON文件中,使用快捷键格式化文档。 Windows/Linux:Shift Alt FmacOS:Shift Option F 右键菜单ÿ…...

【C++】:STL——标准模板库介绍 || string类
📚1.什么是STL STL(standard template libaray-标准模板库):是C标准库的重要组成部分,不仅是一个可复用的组件库,而且 是一个包罗数据结构与算法的软件框架 📚2.STL的版本 原始版本 Alexander Stepanov、Meng Lee 在…...
Python小白之PyCharm仍然显示“No module named ‘xlwings‘”
Python小白之“没有名称为xlwings‘的模块”-CSDN博客文章浏览阅读8次。cmd 打开命令行,输入python出现>>>的提示格,输入import xlwings 回车,正常报错:No module named xlwings。输入python 回车后,再输入im…...

在Uni-app中实现计时器效果
本文将介绍如何在Uni-app中使用Vue.js的计时器功能实现一个简单的计时器效果。 首先,我们需要创建一个包含计时器的组件。以下是一个基本的计时器组件示例: <template><div class"timer"><p>{{ formatTime }}</p><…...

Linux脚本shell中将Windos格式字符转换为unix
众所周知,windos的文档直接复制到linux服务器上去,是需要进行格式转换的,否则可能出现以下报错: 解决方法: vim 脚本 输入 :set ff ##会显示字符格式 :set ffunix ##转换为unix格式 :wq ##保存退出...

【分布式】MIT 6.824 Lab 2B实现细节分析
基于6.824 2020版 http://nil.csail.mit.edu/6.824/2020/schedule.html Lab 2A(选举)一天就完成了,主要是第一次开始写Raft需要稍微熟悉一下,但是几乎不用修改,很容易就通过了。不过到了Lab 2B就会发现2A能够通过纯属侥…...

MySql 数据库初始化,创建用户,创建数据库,授权
登录MySQL(使用管理员账户) mysql -u root -p 设置用户 -- 创建用户并设置密码 CREATE USER user_name% IDENTIFIED BY user_password;-- 删除用户 drop user user_name; 设置数据库 -- 创建数据库 CREATE DATABASE database_name;-- 删除数据库 DR…...

【洛谷算法题】P5712-Apples【入门2分支结构】
👨💻博客主页:花无缺 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 本文由 花无缺 原创 收录于专栏 【洛谷算法题】 文章目录 【洛谷算法题】P5712-Apples【入门2分支结构】🌏题目描述🌏输入格式&…...

如何高效管理macOS安装文件?这款跨平台工具给你答案
如何高效管理macOS安装文件?这款跨平台工具给你答案 【免费下载链接】gibMacOS Py2/py3 script that can download macOS components direct from Apple 项目地址: https://gitcode.com/gh_mirrors/gi/gibMacOS 在技术爱好者和系统管理员的世界里,…...
)
Codex CLI 接 Gemini 3.5 Flash 实测:代码生成、推理速度、价格三维度横评(2026)
上周 Google 发了 Gemini 3.5 Flash,我当天晚上就拿 Codex CLI 接上跑了几个项目里的真实任务。原因很简单——我们团队最近 token 开销涨得太快,老板让我找个"又快又便宜还不太拉胯"的模型顶日常编码场景。Claude Sonnet 4.6 质量没话说但贵&…...

3000+戴森球计划工厂蓝图终极指南:从新手到大师的完全解决方案
3000戴森球计划工厂蓝图终极指南:从新手到大师的完全解决方案 【免费下载链接】FactoryBluePrints 游戏戴森球计划的**工厂**蓝图仓库 项目地址: https://gitcode.com/GitHub_Trending/fa/FactoryBluePrints 还在为戴森球计划中复杂的工厂布局而头疼吗&#…...
)
解锁Midjourney V6复古风生产力:3步精准控制颗粒度、褪色曲线与时代错位感(附12组实测Prompt参数表)
更多请点击: https://codechina.net 第一章:Midjourney V6复古美学的底层逻辑重构 Midjourney V6 并非简单迭代,而是对“视觉时间性”的一次系统性重编码——其复古美学并非依赖滤镜叠加或风格迁移模型,而是将胶片颗粒、暗房化学…...

2026大模型技术全景:从“写代码“到“做工程“
2026大模型技术全景:从"写代码"到"做工程"大模型技术正从"炫酷玩具"迈向"核心生产力工具"。本文从技术进展、关键方向、应用场景到未来趋势,全面梳理2026年大模型技术全景。一、引言 2026年,大模型技…...

告别断电重启就丢程序:深入聊聊紫光同创FPGA的Flash固化与CPLD内置eFlash配置差异
紫光同创FPGA与CPLD配置存储机制深度解析:从瞬态下载到永久固化的技术实现 在数字电路设计领域,FPGA和CPLD的可重构特性为硬件开发带来了极大灵活性。然而,这种灵活性背后需要可靠的配置存储机制作为支撑——断电后程序能否自动恢复…...

跨平台网络资源下载神器:res-downloader高效抓包实战指南
跨平台网络资源下载神器:res-downloader高效抓包实战指南 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 在当今数…...

为什么83%的AI Agent项目卡在POC阶段?——20年架构师拆解4层“隐性集成墙”及破壁工具链
更多请点击: https://kaifayun.com 第一章:为什么83%的AI Agent项目卡在POC阶段?——20年架构师拆解4层“隐性集成墙”及破壁工具链 当AI Agent从论文走向产线,真正的断崖不在模型能力,而在四堵看不见的“集成墙”&am…...

CharacterAI Python API终极指南:如何快速构建AI对话机器人
CharacterAI Python API终极指南:如何快速构建AI对话机器人 【免费下载链接】CharacterAI Unofficial Python API for character.ai 项目地址: https://gitcode.com/gh_mirrors/ch/CharacterAI 你是否想在自己的Python应用中集成CharacterAI的强大对话功能&a…...

为什么你的NotebookLM中文摘要总漏关键信息?3个被官方文档忽略的语言标记陷阱,90%用户正在踩坑
更多请点击: https://kaifayun.com 第一章:NotebookLM多语言支持 NotebookLM 原生支持多种语言的文档理解与对话生成,其底层模型经过多语言语料联合训练,可无缝处理中、英、日、韩、法、德、西等 20 种语言的混合输入。用户上传非…...