FreeRTOS入门(05):事件组
文章目录
- 目的
- 基础说明
- 相关函数
- 使用演示
- 总结
目的
事件组是RTOS中相对常用的用于任务间交互的功能,这篇文章将对相关内容做个介绍。
本文代码测试环境见前面的文章:《FreeRTOS入门(01):基础说明与使用演示》
基础说明
事件组(EventGroup)和单片机硬件的事件或者中断有点像,每个事件组对象就是一个变量(寄存器)。如果 configUSE_16_BIT_TICKS 值为 0 这就是一个32位的变量,为 1 就是一个16位的变量。
事件组对象的高8位供FreeRTOS内部使用,剩余位供用户使用。每一个位(bit)表示一个事件发送,通常该位值为 0 ,表示未发生事件;值为 1 表示发生了事件。
事件组事件在设置的时候可以设置某一位,也可以同时设置某些位。等待事件的任务可以等待某一位有效,也可以等到某些位同时有效。事件被设置后会唤醒所有符合条件的任务(可以用作广播功能)。被唤醒的事件可以选择是否清除事件标志位。
相关函数
// 创建并返回事件组句柄
EventGroupHandle_t xEventGroupCreate( void )// 删除事件组
// 在被删除的事件组上阻塞的任务将被取消阻塞,并且报告事件组值为0
void vEventGroupDelete( EventGroupHandle_t xEventGroup )// 获取事件组中某个或某些位,如果不可用则阻塞
// uxBitsToWaitFor表示要等待的标志位(可以设置多个位)
// xClearOnExit为pdTRUE时会在事件发生后清除所等待的标志位,为pdFALSE则不清除
// xWaitForAllBits为pdTRUE时需要等所有等待的标志位都设置后才会返回,为pdFALSE时任意一位设置均会返回
EventBits_t xEventGroupWaitBits( const EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToWaitFor,const BaseType_t xClearOnExit,const BaseType_t xWaitForAllBits,TickType_t xTicksToWait )// 设置标志位
EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet )
// 清除标志位
EventBits_t xEventGroupClearBits( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToClear )// 事件组的设置与清除在中断中使用的版本,在中断中设置与清除事件组不会立即进行,而是会延时到后面的FreeRTOS守护进程中执行,所以可能需要设置下面才可使用
// INCLUDE_xEventGroupSetBitFromISR, configUSE_TIMERS, INCLUDE_xTimerPendFunctionCall, configUSE_TRACE_FACILITY
BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet, BaseType_t *pxHigherPriorityTaskWoken )
BaseType_t xEventGroupClearBitsFromISR( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToClear )// 获取当前事件组状态
EventBits_t xEventGroupGetBits( EventGroupHandle_t xEventGroup )
EventBits_t xEventGroupGetBitsFromISR( EventGroupHandle_t xEventGroup )// 同步设置(写和等待合并的功能)
// uxBitsToSet为要写的位,uxBitsToWaitFor为要等待的位
EventBits_t xEventGroupSync( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet,const EventBits_t uxBitsToWaitFor,TickType_t xTicksToWait );
使用演示
下面是个基础使用的演示:
#include "debug.h"
#include "FreeRTOS.h" // 引入头文件
#include "task.h" // 引入头文件
#include "event_groups.h" // 引入头文件EventGroupHandle_t xEventGroup; // 事件组句柄void task1(void *pvParameters) {while(1) {xEventGroupSetBits(xEventGroup, 0b0011); // bit1 bit0 写1vTaskDelete(NULL);}
}void task2(void *pvParameters) {while(1) {vTaskDelay(500);xEventGroupSetBits(xEventGroup, 0b0100); // bit2 写1vTaskDelete(NULL);}
}void task3(void *pvParameters) {while(1) {// 当 bit0 为1时触发,响应后不清除标志位EventBits_t uxBits = xEventGroupWaitBits(xEventGroup, 0b0001, pdFALSE, pdFALSE, portMAX_DELAY);printf("t3-%d\r\n", uxBits); // 打印事件触发时的标志位vTaskDelay(300);}
}void task4(void *pvParameters) {while(1) {// 当 bit3 bit2 均为0时触发,响应后清除标志位EventBits_t uxBits = xEventGroupWaitBits(xEventGroup, 0b0110, pdTRUE, pdTRUE, portMAX_DELAY);printf("t4-%d\r\n", uxBits); // 打印事件触发时的标志位printf("t4-%d\r\n", xEventGroupGetBits(xEventGroup)); // 打印当前标志位xEventGroupClearBits(xEventGroup, 0x0001); // 清除标志位printf("t4-%d\r\n", xEventGroupGetBits(xEventGroup)); // 打印当前标志位}
}int main(void) {NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);SystemCoreClockUpdate();Delay_Init();USART_Printf_Init(115200);xEventGroup = xEventGroupCreate(); //xTaskCreate(task1, "task1", 256, NULL, 5, NULL);xTaskCreate(task2, "task2", 256, NULL, 5, NULL);xTaskCreate(task3, "task3", 256, NULL, 5, NULL);xTaskCreate(task4, "task4", 256, NULL, 5, NULL);vTaskStartScheduler(); // 任务调度,任务将在这里根据情况开始运行,程序将在这里无序循环while(1) {} // 程序不会运行到这里
}// 时间 任务 xEventGroup
// tick 0000 0b0000
// tick 0000 task1 0b0011
// tick 0001 task3 0b0011 // 打印输出
// tick 0301 task3 0b0011 // 打印输出
// tick 0500 task2 0b0111
// tick 0501 task4 0b0111 // 打印输出
// tick 0501 task4 0b0001 // 打印输出
// tick 0501 task4 0b0000 // 打印输出

下面是个同步方式演示:
#include "debug.h"
#include "FreeRTOS.h" // 引入头文件
#include "task.h" // 引入头文件
#include "event_groups.h" // 引入头文件EventGroupHandle_t xEventGroup; // 事件组句柄void task1(void *pvParameters) {while(1) {printf("t1s1-%d\r\n", xEventGroupGetBits(xEventGroup)); // 打印事件触发时的标志位EventBits_t uxBits = xEventGroupSync(xEventGroup, 0b0001, 0b0011, portMAX_DELAY); // 设置0b0001,等待0b0011printf("t1s2-%d\r\n", uxBits); // 打印事件触发时的标志位vTaskDelete(NULL);}
}void task2(void *pvParameters) {while(1) {vTaskDelay(500);printf("t2s1-%d\r\n", xEventGroupGetBits(xEventGroup)); // 打印事件触发时的标志位EventBits_t uxBits = xEventGroupSync(xEventGroup, 0b0010, 0b0011, portMAX_DELAY); // 设置0b0010,等待0b0011printf("t2s2-%d\r\n", uxBits); // 打印事件触发时的标志位vTaskDelete(NULL);}
}int main(void) {NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);SystemCoreClockUpdate();Delay_Init();USART_Printf_Init(115200);xEventGroup = xEventGroupCreate(); //xTaskCreate(task1, "task1", 256, NULL, 5, NULL);xTaskCreate(task2, "task2", 256, NULL, 5, NULL);vTaskStartScheduler(); // 任务调度,任务将在这里根据情况开始运行,程序将在这里无序循环while(1) {} // 程序不会运行到这里
}

总结
就像本文基础说明中介绍的那样,事件组和单片机硬件的事件或者中断有点像,理解了这点的话事件组使用上其实并不复杂的。
相关文章:
FreeRTOS入门(05):事件组
文章目录目的基础说明相关函数使用演示总结目的 事件组是RTOS中相对常用的用于任务间交互的功能,这篇文章将对相关内容做个介绍。 本文代码测试环境见前面的文章:《FreeRTOS入门(01):基础说明与使用演示》 基础说明…...

【API网关】Kong安装和基本操作
文章目录前言一、API网关选型和Kong的安装1. 什么是API网关2. API网关技术选型3. 安装postgresql和migrations4. 安装kong5. 安装konga二、基本的路由转发配置1. kong的8001、8000和1337端口号的关系2. 基本的路由转发配置3. kong集成consul实现服务发现和负载均衡4. kong配置j…...

git --- stash用法
1 git stash命令介绍 // 保存当前分支的修改,回到上个版本的状态 git stash // 保存当前分支的修改,回到上个版本的状态,msg是保存当前修改的说明 git stash save "msg" // 用来展示所有保存的列表 git stash list // 用来展示某一保存记录所修改的操作 gi…...

【星海出品】VScode安装配置
安装VScode最好在官方网站上下载。 例如 https://code.visualstudio.com/Download 不知道自己的windows版本的话,可以命令行WINR 运行 输入: systeminfo | find "OS" //获取OS的版本信息。 systeminfo | find "系统类型" //获取系统…...

docker 基础命令备忘录
1. 官方安装docker curl -fsSL https://get.docker.com -o get-docker.sh && sh get-docker.shcurl -L "https://github.com/docker/compose/releases/download/v2.16.0/docker-compose-$(uname -s)-$(uname -m)" -o /usr/local/bin/docker-compose chmod x…...
)
华为OD机试 - 创建二叉树(Java JS Python)
题目描述 请按下列描述构建一颗二叉树,并返回该树的根节点: 1、先创建值为-1的根结点,根节点在第0层; 2、然后根据operations依次添加节点: operations[i] = [height, index] 表示对第 height 层的第index 个节点node, 添加值为 i 的子节点: 若node 无「左子节点」,则…...

服务案例|基于IT事件管理,提升业务连续性
数字化经济时代,IT架构复杂性越来越高,业务连续性成为很多行业或企业最核心的任务。业务连续性管理是一个不断提升的过程,围绕事件“发现-响应-定位处理-降低发生”的事件处理思路,结合平台化运维,助力业务快速提升。 …...
你说下HashMap的工作原理?
我在网上看了很多文章 ,各种长篇大论 ,原理细节、实在看不下去了,所以着重讲一下,HashMap 面试会问到的点 说人话, 你们公司的集合 不会自研吧, 假如 你们叫 锤子科技 ,那老板也不会要求你去写一…...

k8s 配置ingress 并做一个demo
需求:k8s 配置好之后除了 nodeport 以外都是对集群内部的行为使用nodeport 并不是很友好,要自己处理很多的端口管理使用ingress 可以更好的整合配置服务进程:下载ingress-nginx 的yaml 文件https://github.com/kubernetes/ingress-nginx/blob…...

【手把手一起学习】(七) Altium Designer 20常用PCB设计规则
1 常用PCB设计规则 PCB规则设计是PCB设计中至关重要的环节,它约束了电气要求、布线方式、器件摆放位置等,为后续的手动布局、布线提供依据。完善的PCB规则设计,可以减少设计中的错误,提高PCB设计效率。 1.1 PCB设计规则管理器 …...

(01)Unity 中使用 HDRP
概述Unity在2019.2版本中推出HDRP(高清渲染管线),目的是为了提高图形质量,实现从照片写实到风格化的图像。先看一下官方对HDRP的概述:高清渲染管线 (HDRP) 是由 Unity 构建的高保真脚本化渲染管…...
使用cmake在win10编译yolov5+tensorRT+cuda+cudnn+protobuf代码进行混合编译
这里进行之前需要把protobuf在win10下编译,可以参考这篇文章从Linux下载下来的工程代码,这里建议直接使用vs系列打开不要用vscode打开,vscode对win下的cmake不友好,主要体现在报错机制无法直接定位,题主的环境是vs2022…...
)
《C++ Primer Plus》第17章:输入、输出和文件(7)
编程练习 编写一个程序计算输入流中第一个$之前的字符数目,并将$留在输入流中。 #include<iostream>int main() {int ct 0;while(std::cin.peek()!$){ct;std::cin.get();}std::cout << "num: " << ct << std::endl;return 0; }答…...
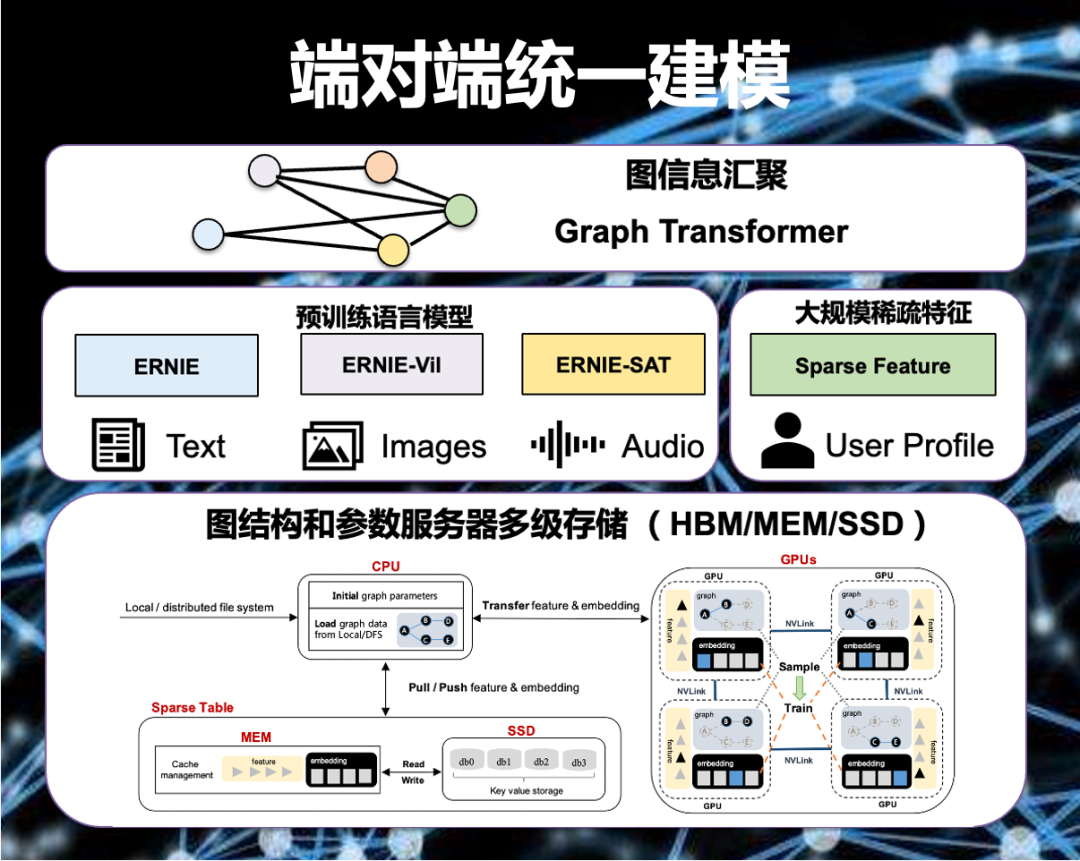
PGLBox 超大规模 GPU 端对端图学习训练框架正式发布
作者 | PGLBox项目组 导读 PGLBox是百度研发的基于GPU的大规模图模型训练框架,支持数百亿节点和边的图模型全GPU训练,已在百度广泛部署。相比业界主流的分布式 CPU 解决方案,PGLBox 具有超高性能、超大规模、算法丰富、灵活易用、落地广泛等优…...
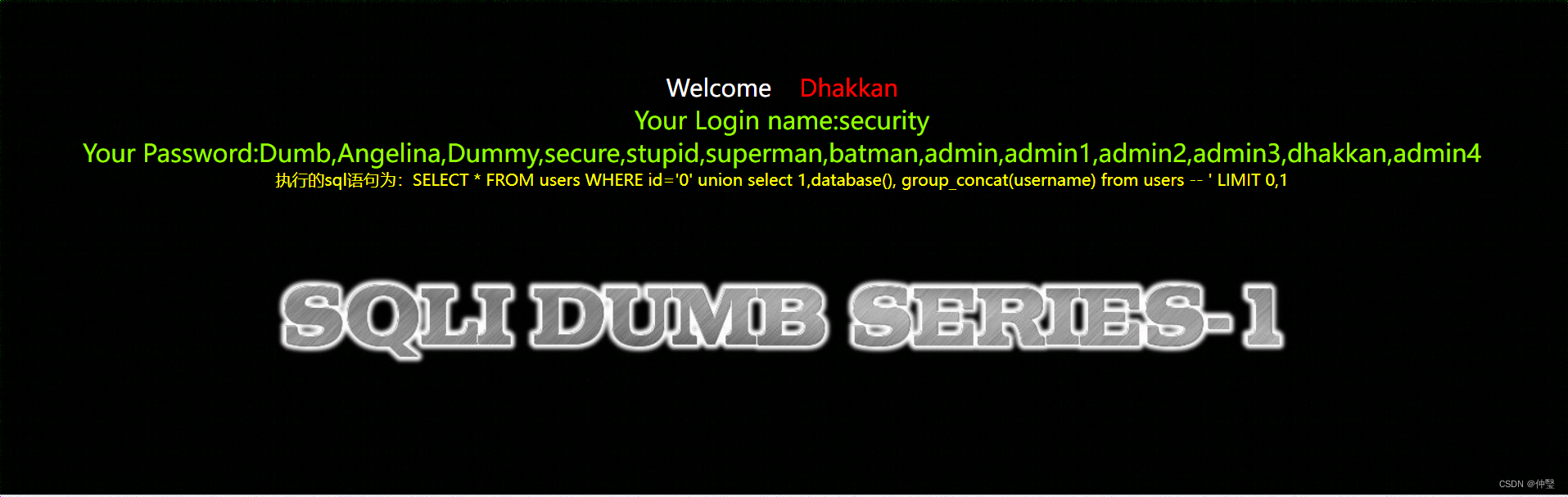
sql-labs-Less1
靶场搭建好了,访问题目路径 http://127.0.0.1/sqli-labs-master/Less-1/ 我最开始在做sql-labs靶场的时候很迷茫,不知道最后到底要得到些什么,而现在我很清楚,sql注入可以获取数据库中的信息,而获取信息就是我们的目标…...

又一个国内类ChatGPT模型?【秘塔科技上线自研LLM大模型「对话写作猫」】
又一个国内类ChatGPT模型?【秘塔科技上线自研LLM大模型「对话写作猫」】 说个题外话,今天一大早就收到了Biying的邮件。前段时间不是申请了New Biying的内测吗?下午可以尝试一下玩一会儿。如果体验感还不错或者还有很多bug,那我到…...
卷麻了,00后测试用例写的比我还好,简直无地自容......
经常看到无论是刚入职场的新人,还是工作了一段时间的老人,都会对编写测试用例感到困扰?例如: 如何编写测试用例? 作为一个测试新人,刚开始接触测试,对于怎么写测试用例很是头疼,无法…...

动态网页的核心——JSP
文章目录1,JSP 概述2,JSP 小案例2.1 搭建环境2.2 导入 JSP 依赖2.3 创建 jsp 页面2.4 编写代码2.5 测试3,JSP 原理4,JSP 总结4.1 JSP的 缺点4.2技术的发展历程4.3JSP的必要性最后说一句1,JSP 概述 JSP(全称…...

RK3588平台开发系列讲解(系统篇)init.d介绍
平台内核版本安卓版本RK3588Linux 5.10Android 12文章目录 一、Linux启动简介二、sysvinit配置三、inid.d介绍沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇介绍init.d相关知识。 一、Linux启动简介 Linux用户空间启动时,第一个会启动init进程,用来引导启动其…...

taobao.user.buyer.get( 查询买家信息API )
¥开放平台基础API必须用户授权 查询买家信息API,只能买家类应用调用。 公共参数 请求地址: HTTP地址 http://gw.api.taobao.com/router/rest 公共请求参数: 公共响应参数: 请求参数 响应参数 点击获取key和secret 请求示例 TaobaoClient client new…...

逻辑表达式与真值表转换
逻辑表达式与真值表转换 真值表与逻辑表达式是数字电路设计的两种等价表示,掌握它们之间的转换是基本功。 🎯 本章学习要点 理解真值表的结构和表示方法掌握从真值表写出逻辑表达式(最小项之和)掌握从逻辑表达式列出真值表了解最…...

《凰标》与《第一大道》:同一宇宙下的龙凤双璧@凤凰标志
龙凤双璧:海棠山铁哥文学宇宙宣言——《第一大道》《凰标》世界观联动白皮书一、时代之问:当网文只剩“单兵”市场痛点铁哥答案单兵叙事双IP共生世界观割裂同源宇宙IP不成体系闭环叙事 二、宇宙基石:一破一立的双璧格局 #mermaid-svg-A2eFhZn…...

InjectFix实战:除了修Bug,如何在Unity里用它安全地‘新增’功能与属性?
InjectFix实战:突破Bug修复边界,安全扩展Unity功能 在Unity开发中,InjectFix作为热修复方案早已被开发者熟知,但大多数教程仅停留在修复Bug的基础用法上。当线上版本需要临时增加活动界面属性或工具函数时,重新打包发布…...
)
从医学到金融:用Python实战Cox比例风险模型进行企业风险预测(附完整代码)
从医学到金融:用Python实战Cox比例风险模型进行企业风险预测 在医疗领域,Cox比例风险模型早已成为生存分析的金标准。但鲜为人知的是,这套强大的统计工具同样适用于金融风险评估——从预测企业破产概率到评估供应链中断风险,生存分…...

ChatGPT写论文被判AI怎么办?降AI率完整应对攻略+工具推荐!
ChatGPT写论文被判AI怎么办?降AI率完整应对攻略工具推荐! ChatGPT 是 2022 年起最早被广泛使用的大模型,现在依然是不少留学生、研究生写英文论文/中文论文的首选。但它写出来的论文在 AIGC 检测平台(Turnitin、知网英文模块、维普…...

如何用dnGrep进行代码搜索:程序员必备的10个搜索模式
如何用dnGrep进行代码搜索:程序员必备的10个搜索模式 【免费下载链接】dnGrep Graphical GREP tool for Windows 项目地址: https://gitcode.com/gh_mirrors/dn/dnGrep dnGrep是一款强大的Windows图形化GREP搜索工具,专为开发者和技术用户设计。这…...

008、RISC-V在TinyML中的崛起与优势
008、RISC-V在TinyML中的崛起与优势 从一块“变砖”的开发板说起 去年冬天,我在调试一个基于Cortex-M4的智能传感器节点。项目要求将唤醒词检测模型塞进32KB的SRAM里,功耗要控制在50μA以下。折腾了两周,模型量化、算子裁剪、甚至手写汇编优化了部分矩阵运算——终于跑通了…...

别再死磕动态规划了!用Python模拟退火算法搞定背包问题,附完整代码
用Python模拟退火算法优雅解决背包问题:从理论到实战 在算法学习的过程中,背包问题就像一座难以逾越的高山,让无数初学者望而生畏。传统的动态规划解法虽然精确,但代码实现复杂、状态转移方程难以理解,对于实际应用场景…...

H3C交换机三层组网配置保姆级复盘:从拓扑设计到排错命令一条龙
H3C交换机三层组网实战指南:从规划到排错的完整工作流 当企业网络规模逐渐扩大,部门间的隔离与互通需求变得复杂时,二层交换网络往往显得力不从心。这时,三层交换技术的引入就成为网络工程师的必修课。本文将带你深入一个真实的办…...

别再死记硬背PID公式了!用Python+MATLAB手把手带你调参,搞定线性系统校正
别再死记硬背PID公式了!用PythonMATLAB手把手带你调参,搞定线性系统校正 记得第一次接触PID控制时,教授在黑板上写满微分方程和传递函数,而我只想知道——这些参数到底该怎么调?直到在实验室通宵调试平衡小车时&#x…...