Yolov5
Yolov5
Anchor
1.Anchor是啥?
anchor字面意思是锚,是个把船固定的东东(上图),anchor在计算机视觉中有锚点或锚框,目标检测中常出现的anchor box是锚框,表示固定的参考框。
目标检测是"在哪里有什么"的任务,在这个任务中,目标的类别不确定、数量不确定、位置不确定、尺度不确定。传统非深度学习方法和早期深度学习方法,都要金字塔多尺度+遍历滑窗的方式,逐尺度逐位置判断"这个尺度的这个位置处有没有认识的目标",这种穷举的方法非常低效。
最近SOTA的目标检测方法几乎都用了anchor技术。首先预设一组不同尺度不同位置的anchor,覆盖几乎所有位置和尺度,每个anchor负责检测与其交并比大于阈值 (训练预设值,常用0.5或0.7) 的目标,anchor技术将问题转换为"这个固定参考框中有没有认识的目标,目标框偏离参考框多远",不再需要多尺度遍历滑窗,真正实现了又好又快,如在Faster R-CNN和SSD两大主流目标检测框架及扩展算法中anchor都是重要部分。
目标检测中的固定的参考框
yolov5s.yaml
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license# Parameters
nc: 80 # number of classes
# 控制模型的大小
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8 目标框anchor是原图 八分之一stride的大小- [30,61, 62,45, 59,119] # P4/16 十六分之一- [116,90, 156,198, 373,326] # P5/32
#感受野比较小,适合小目标检测,浅层次的feature
#往下,感受野变大??适合检测大物体
# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args]
# number(layer重复的次数 实际上会乘上depth_multiple: 0.33,1*0.33)
# args(每层输出的channel,实际上会乘上width_multiple: 0.50 ,64*0.50
# 向上取整
#每行是一个layer的类别,
# 第一列,输入的feature从哪儿来的,-1表示输入来自上一层的输出
# [64, 6, 2, 2] 64是输出的channel,输入channel由上一层决定,6是卷积核大小,stride,padding[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
# 1-P2/4,第一层,p2 ,4 :featuremap的大小变成了原图的 四分之一[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9# SPPF :不同尺度feature的融合]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
#20*20*1024的feature map[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
bottleneck 和detect部分
.pt文件 训练文件
路径在这
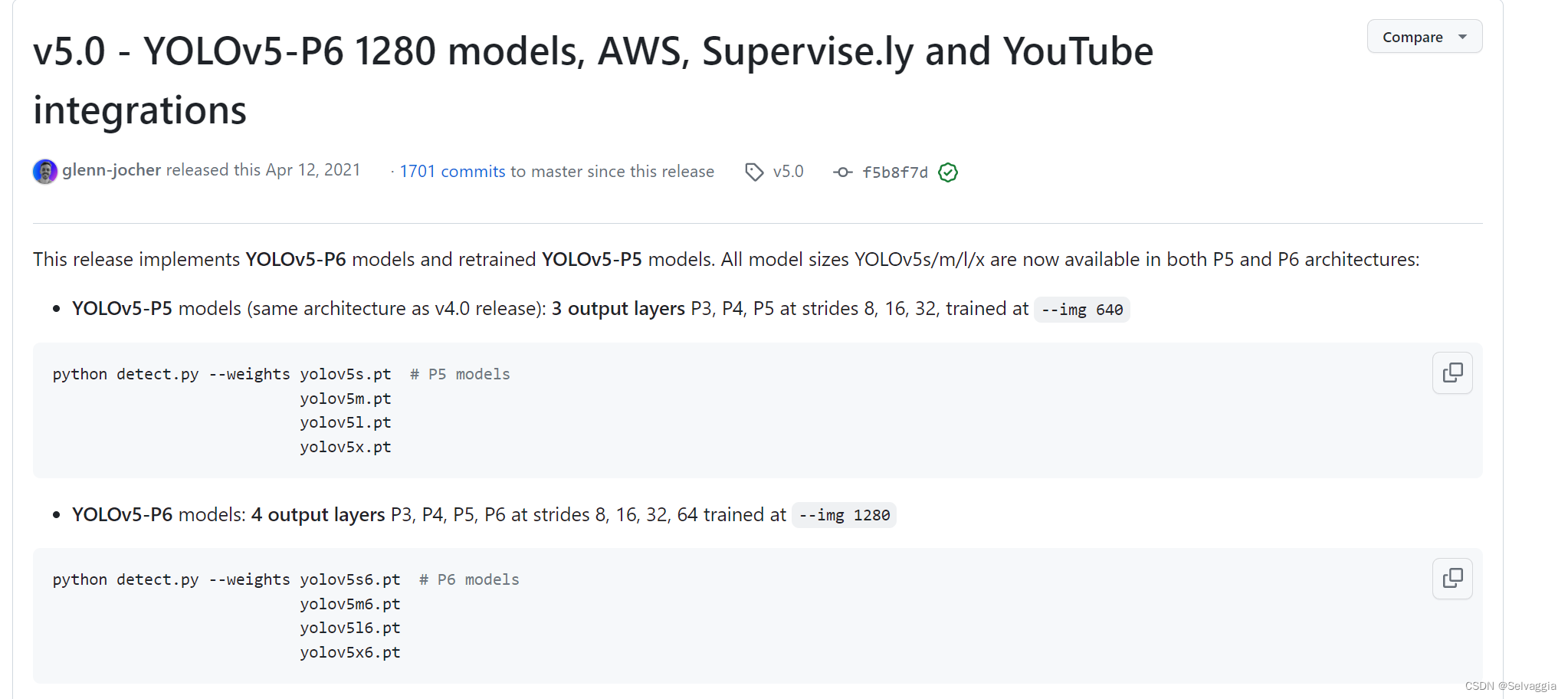
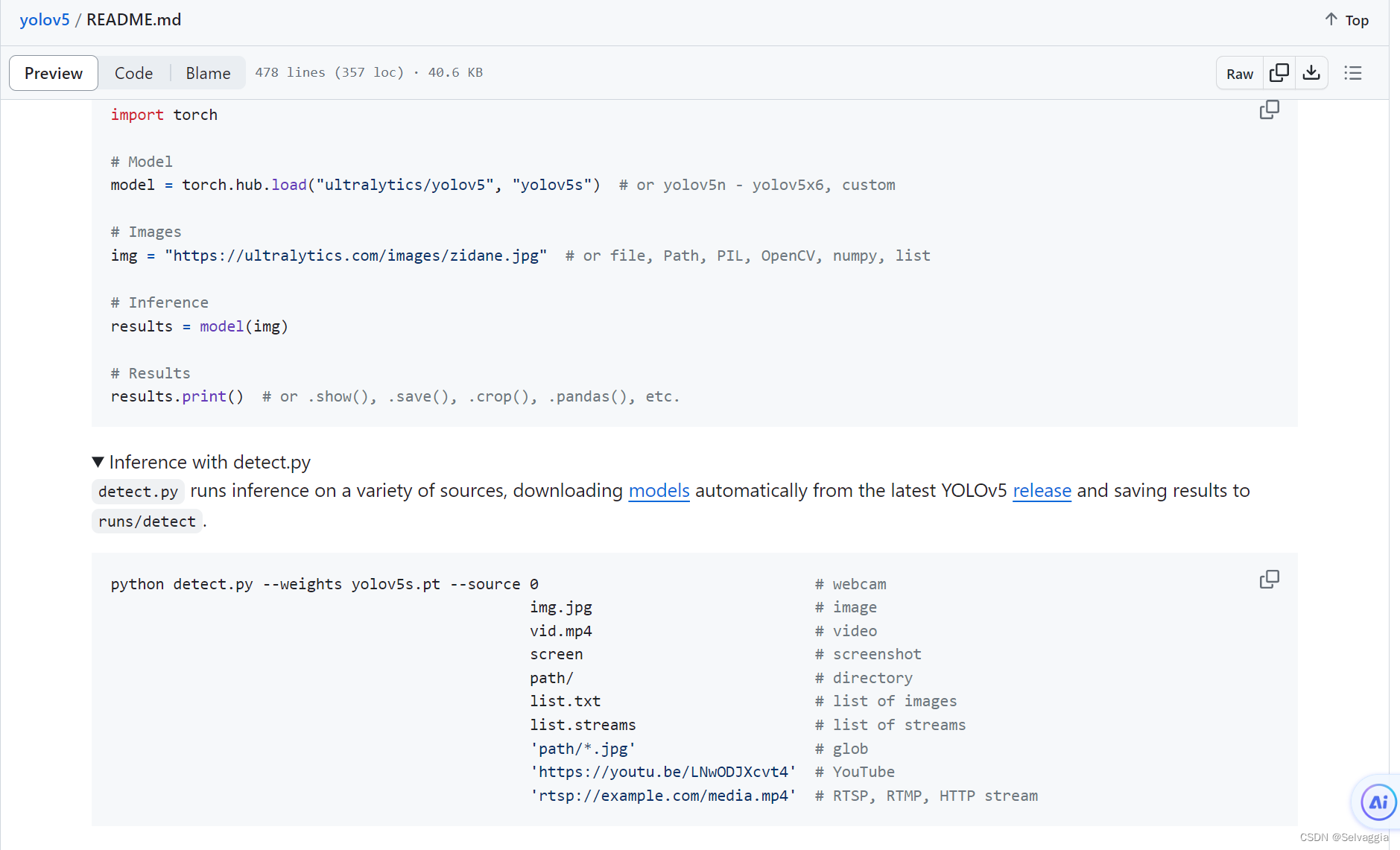
detect.py
核心部分
# 通过命令行设置其中的一些参数
# 不同文件对应不同的模型(weights不同,目标检测的置信度不同# --source,输入是个文件夹,会对文件夹下所有的文件进行检测
也可以指定一张图片的相对路径,
可以是视频,会分成一帧一帧来处理
只支持YouTube视频链接,别的视频要下载下来
检测不到的objections 是因为没有进行标记
if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', nargs='+', type=str, default='yolov5l.pt', help='model.pt path(s)')parser.add_argument('--source', type=str, default='data/images', help='source') # file/folder, 0 for webcamparser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')置信度,检测结果某个区域置信度大于0.25就当作是个物体实际运用过程中,对参数进行调整和确认的parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')default=0.45,iou的值大于阈值就当作一个objection,从两个框中任选一个来表示这个物体,小于阈值就当作不同的物体设置为0,框和框之间不会有交集parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')-- device:使用CPU还是GPU,可以不同设置,默认是空parser.add_argument('--view-img', action='store_true', help='display results')在命令行中制定了这个参数,就会parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')parser.add_argument('--nosave', action='store_true', help='do not save images/videos')parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')增强检测结果的一些方式 parser.add_argument('--augment', action='store_true', help='augmented inference')parser.add_argument('--update', action='store_true', help='update all models')parser.add_argument('--project', default='runs/detect', help='save results to project/name')parser.add_argument('--name', default='exp', help='save results to project/name')parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')opt = parser.parse_args()print(opt)check_requirements(exclude=('pycocotools', 'thop'))
通过命令行设置其中的一些参数不同文件对应不同的模型(weights不同,目标检测的置信度不同
# --source,输入是个文件夹,会对文件夹下所有的文件进行检测
也可以指定一张图片的相对路径,
可以是视频,会分成一帧一帧来处理
只支持YouTube视频链接,别的视频要下载下来
检测不到的objections 是因为没有进行标记
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
对输入的image进行 resize,再送入神经网络中
这些训练模型,指定image size是640
训练过程,网络运算过程中对图片大小进行缩放,会恢复,输入输出尺寸其实保持不变,
最好是和训练模型指定的image size进行匹配,不匹配也没关系
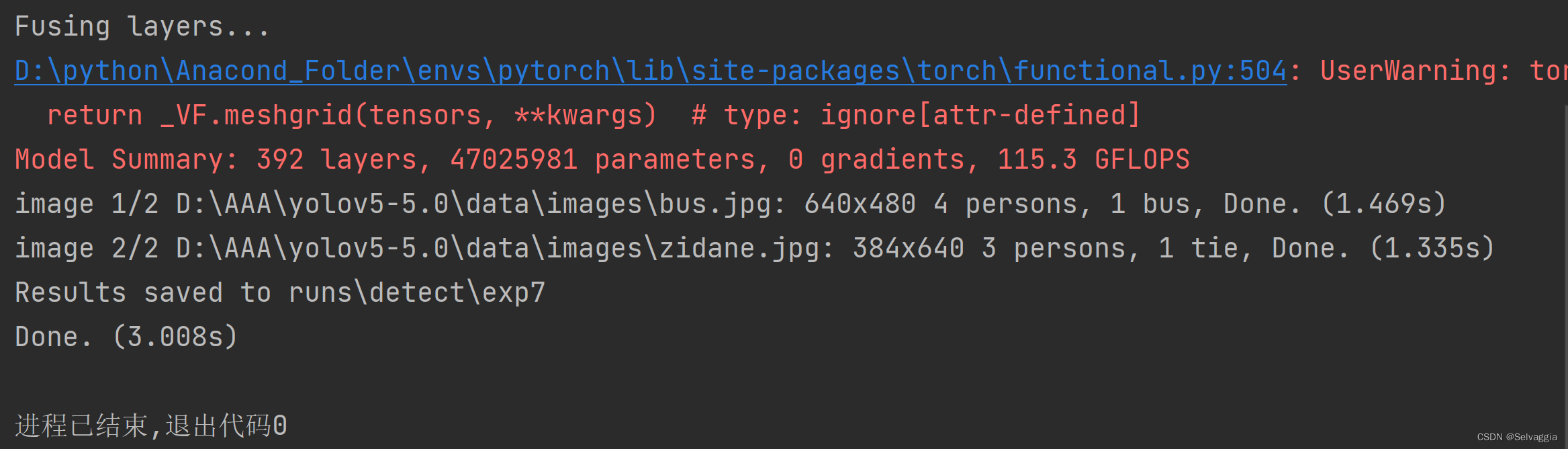
运行结果
进行实时检测,rstp链接
通过手机电脑摄像头检测
相关文章:
Yolov5
Yolov5 Anchor 1.Anchor是啥? anchor字面意思是锚,是个把船固定的东东(上图),anchor在计算机视觉中有锚点或锚框,目标检测中常出现的anchor box是锚框,表示固定的参考框…...

36、Flink 的 Formats 之Parquet 和 Orc Format
Flink 系列文章 1、Flink 部署、概念介绍、source、transformation、sink使用示例、四大基石介绍和示例等系列综合文章链接 13、Flink 的table api与sql的基本概念、通用api介绍及入门示例 14、Flink 的table api与sql之数据类型: 内置数据类型以及它们的属性 15、Flink 的ta…...
--安装)
Docker 笔记(一)--安装
Docker 笔记(一)–安装 记录Docker 安装操作记录,便于查询。 参考 链接: Docker 入门到实战教程(二)安装Docker链接: docker入门(利用docker部署web应用)链接: 阿里云容器镜像服务/镜像加速器/操作文档链接: 网易镜像中心链接: 阿里云镜像…...

endnote20如何导入已经下载好的ris和pdf文件
查看此链接 1 文献导入 1.1 PDF导入 (1)方法一 打开:菜单栏–>Import–>FIle或folder 单个导入PDF或导入一个文件夹的PDF或通过拖曳多个PDF进入空白处完成导入 1.3 导入已经整理好的文献资料 已有的ris文件 打开:菜单栏–…...
x程无忧sign逆向分析
x程无忧sign逆向分析: 详情页sign: 详情页网站: import base64 # 解码 result base64.b64decode(aHR0cHM6Ly9qb2JzLjUxam9iLmNvbS9ndWFuZ3pob3UvMTUxODU1MTYyLmh0bWw/cz1zb3Vfc291X3NvdWxiJnQ9MF8wJnJlcT0zODQ4NGQxMzc2Zjc4MDY2M2Y1MGY2Y…...

Rust8.1 Smart Pointers
Rust学习笔记 Rust编程语言入门教程课程笔记 参考教材: The Rust Programming Language (by Steve Klabnik and Carol Nichols, with contributions from the Rust Community) Lecture 15: Smart Pointers src/main.rs use crate::List::{Cons, Nil}; use std::ops::Deref…...

MATLAB与Excel的数据交互
准备阶段 clear all % 添加Excel函数 try Excel=actxGetRunningServer(Excel.Application); catch Excel=actxserver(Excel.application); end % 设置Excel可见 Excel.visible=1; 插入数据 % % 激活eSheet1 % eSheet1.Activate; % 或者 % Activate(eSheet1); % % 打开…...

使用.NET 4.0、3.5时,UnmanagedFunctionPointer导致堆栈溢出
本文介绍了使用.NET 4.0、3.5时,UnmanagedFunctionPointer导致堆栈溢出的处理方法,对大家解决问题具有一定的参考价值,需要的朋友们下面随着小编来一起学习吧! 问题描述 我在带有try catch块的点击处理程序中有一个简单的函数。…...
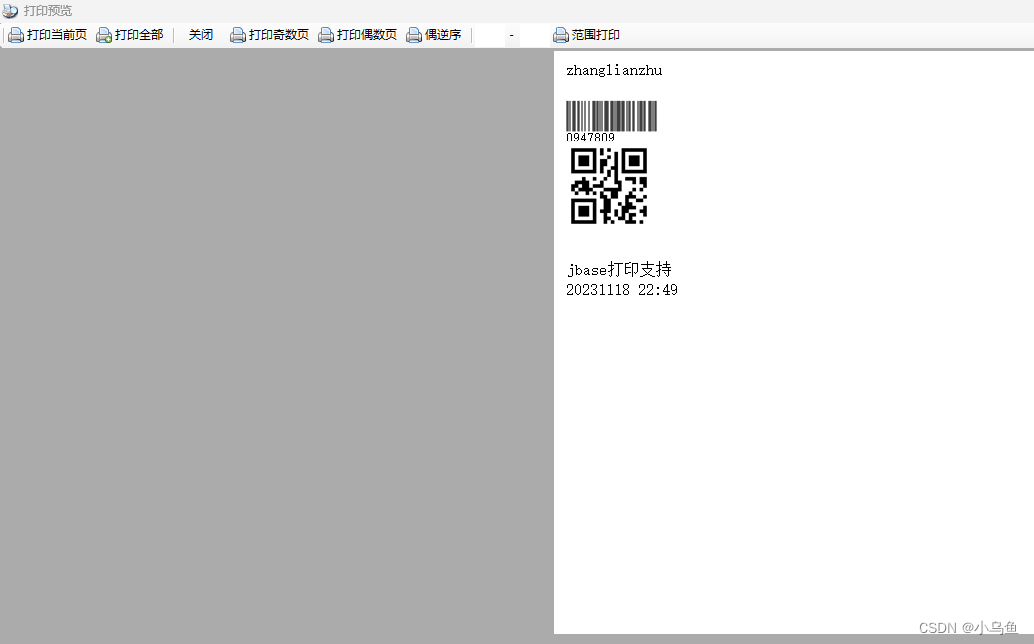
jbase打印导出实现
上一篇实现了虚拟M层,这篇基于虚拟M实现打印导出。 首先对接打印层 using Newtonsoft.Json; using System; using System.Collections.Generic; using System.Linq; using System.Net; using System.Text; using System.Threading.Tasks; using System.Xml;namesp…...

特征缩放和转换以及自定义Transformers(Machine Learning 研习之九)
特征缩放和转换 您需要应用于数据的最重要的转换之一是功能扩展。除了少数例外,机器学习算法在输入数值属性具有非常不同的尺度时表现不佳。住房数据就是这种情况:房间总数约为6至39320间,而收入中位数仅为0至15间。如果没有任何缩放,大多数…...
前端算法面试之堆排序-每日一练
如果对前端八股文感兴趣,可以留意公重号:码农补给站,总有你要的干货。 今天分享一个非常热门的算法--堆排序。堆的运用非常的广泛,例如,Python中的heapq模块提供了堆排序算法,可以用于实现优先队列…...
C++之set/multise容器
C之set/multise容器 set基本概念 set构造和赋值 #include <iostream> #include<set> using namespace std;void PrintfSet(set<int>&s) {for(set<int>::iterator it s.begin();it ! s.end();it){cout<<*it<<" ";}cout&l…...

本地部署AutoGPT
我们都了解ChatGPT,是Openai退出的基于GPT模型的新一代 AI助手,可以帮助解决我们在多个领域的问题。但是你会发现,在某些问题上,ChatGPT 需要经过不断的调教与沟通,才能得到接近正确的答案。对于你不太了解的领域领域&…...

ProtocolBuffers(protobuf)详解
目录 前言特点语法定义关键字JSON与Protocol Buffers互相转换gRPC与Protocol Buffers的关系 前言 Protocol Buffers(通常简称为protobuf)是Google公司开发的一种数据描述语言,它能够将结构化数据序列化,可用于数据存储、通信协议…...
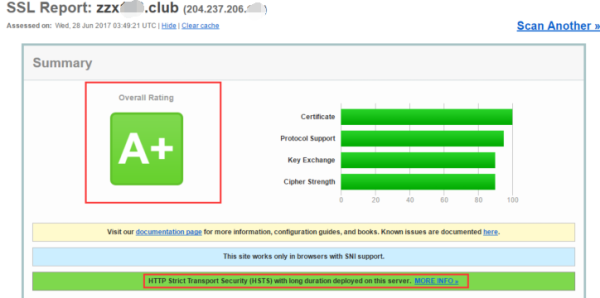
HTTP 到 HTTPS 再到 HSTS 的转变
近些年,随着域名劫持、信息泄漏等网络安全事件的频繁发生,网站安全也变得越来越重要,也促成了网络传输协议从 HTTP 到 HTTPS 再到 HSTS 的转变。 HTTP HTTP(超文本传输协议) 是一种用于分布式、协作式和超媒体信息系…...
清华学霸告诉你:如何自学人工智能?
清华大学作为中国顶尖的学府之一,培养了许多优秀的人才,其中不乏在人工智能领域有所成就的学霸。通过一位清华学霸的经验分享,揭示如何自学人工智能,帮助你在这场科技浪潮中勇往直前。 一、夯实基础知识 数学基础:学习…...
Ubuntu 安装VMware Tools选项显示灰色,如何安装VMware Tools
切换apt源为阿里云: https://qq742971636.blog.csdn.net/article/details/134291339 只要你的网络没问题,你直接执行这几个命令,重启ubuntu虚拟机即可、 sudo dpkg --configure -a sudo apt-get autoremove open-vm-tools sudo apt-get ins…...

SpringBoot 2.x 实战仿B站高性能后端项目
SpringBoot 2.x 实战仿B站高性能后端项目 下栽の地止:请看文章末尾 通常SpringBoot新建项目,默认是集成了Maven,然后所有内容都在一个主模块中。 如果项目架构稍微复杂一点,就需要用到Maven多模块。 本文简单概述一下,…...
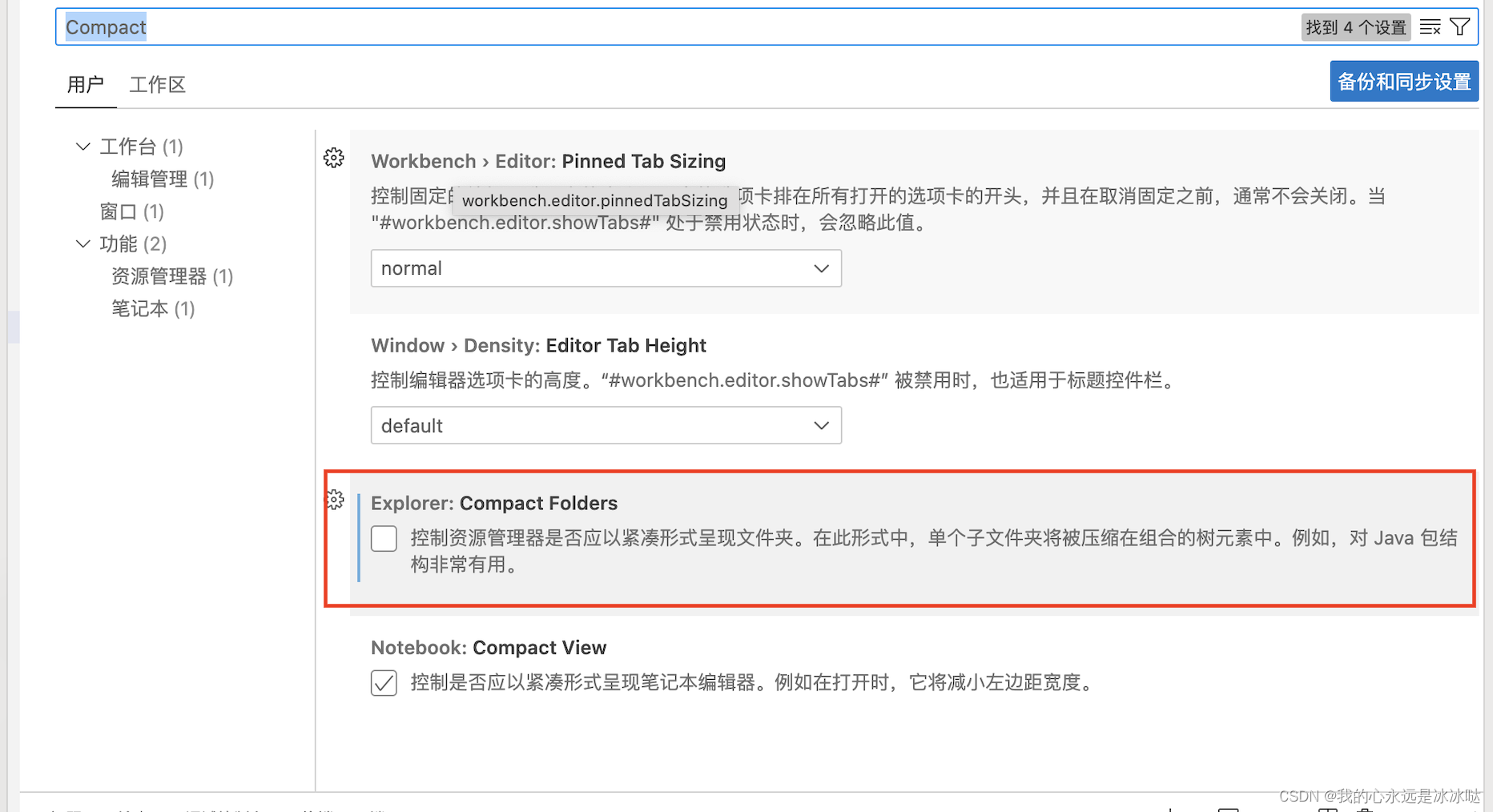
vscode文件夹折叠问题
今天发现一个vscode的文件夹显示的问题,首先是这样的,就是我的文件夹里又一个子文件夹,子文件夹里有一些文件,但是我发现无法折叠起这个子文件夹,总是显示全部的文件,这让我备份很难,具体参考 h…...
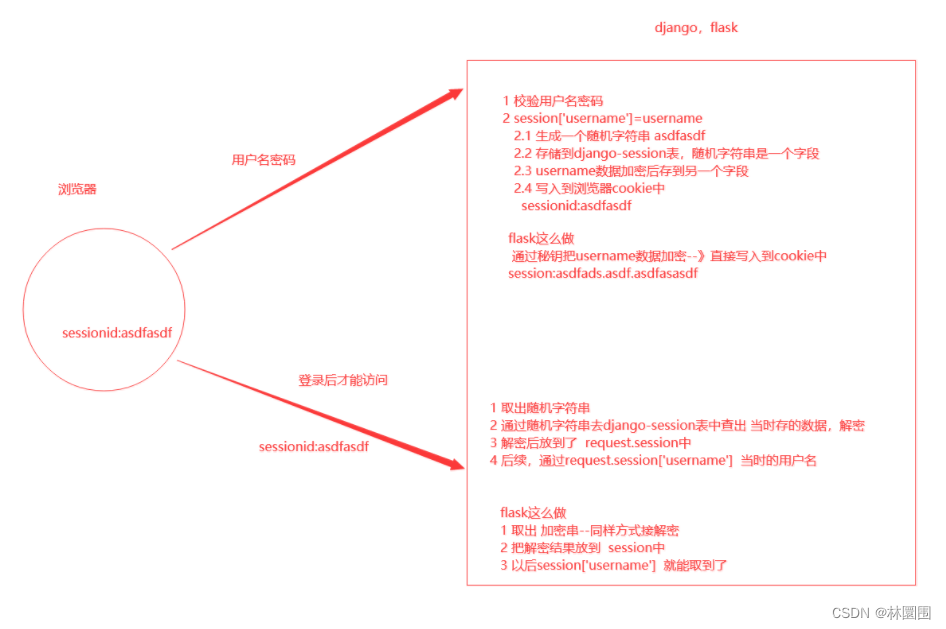
4-flask-cbv源码、Jinja2模板、请求响应、flask中的session、flask项目参考
1 flask中cbv源码 2 Jinja2模板 3 请求响应 4 flask中的session 5 flask项目参考 1 flask中cbv源码 ***flask的官网文档:***https://flask.palletsprojects.com/en/3.0.x/views/1 cbv源码执行流程1 请求来了,路由匹配成功---》执行ItemAPI.as_view(item…...

【技术选型指南】Avalonia、MAUI、Uno Platform、Flutter、Electron、Qt与Tauri:从场景到决策的深度剖析
1. 跨平台框架选型的核心考量因素 当你准备启动一个新项目或重构现有技术栈时,面对琳琅满目的跨平台框架,选择困难症很容易发作。我经历过多次这样的技术决策过程,发现关键在于先明确项目的核心需求。就像装修房子前要先确定是想要北欧简约风…...

SillyTavern:革新性AI角色扮演平台的全方位实践指南
SillyTavern:革新性AI角色扮演平台的全方位实践指南 【免费下载链接】SillyTavern LLM Frontend for Power Users. 项目地址: https://gitcode.com/GitHub_Trending/si/SillyTavern 在人工智能对话系统日益普及的今天,用户对虚拟交互的需求已从简…...

SEO_详解SEO优化的基本原理与核心策略介绍
<h2>SEO优化的基本原理:为什么SEO对网站流量至关重要</h2> <p>SEO优化,即搜索引擎优化,是指通过优化网站结构、内容和外部链接等多个方面,提高网站在搜索引擎结果页面上的排名,从而吸引更多自然流量…...

FastAPI项目PyInstaller打包实战:避坑指南与最佳实践
1. 为什么需要打包FastAPI项目? 当你用FastAPI开发完一个Web应用后,最终需要部署到生产环境。传统方式要求服务器安装Python环境、配置依赖库,这个过程既繁琐又容易出错。PyInstaller的价值就在于能把整个项目打包成独立可执行文件࿰…...

深入解析 Promise 核心原理,从零手写实现到实战应用
1. Promise 基础概念与使用场景 1.1 什么是 Promise? 想象你点了一份外卖,商家给你一个取餐号而不是立即给你食物。这个取餐号就是 Promise,它代表一个未来才会完成的操作(外卖送达)。在 JavaScript 中,Pro…...
)
保姆级教程:用YOLOv8+PyQt5打造你的番茄成熟度检测桌面应用(附完整源码与数据集)
从零构建番茄成熟度检测桌面应用:YOLOv8与PyQt5深度整合实战 在农业智能化浪潮中,计算机视觉技术正逐步改变传统农业生产方式。以番茄种植为例,成熟度判断直接影响采摘效率和经济效益。本文将带您完整实现一个结合YOLOv8目标检测与PyQt5图形界…...

GEO数据整合实战:跨越批次效应的多队列联合分析
1. GEO数据整合的核心挑战 当你手头有多个GEO数据集时,就像收集了来自不同实验室的实验笔记。我处理过GSE83521和GSE89143的联合分析,发现最大的障碍就是批次效应——就像不同厨师用相同菜谱做菜,味道总会有些差异。这种差异可能来自实验时间…...

终极指南:如何为MiniSearch编写自定义插件和扩展,打造专属搜索体验
终极指南:如何为MiniSearch编写自定义插件和扩展,打造专属搜索体验 【免费下载链接】minisearch Tiny and powerful JavaScript full-text search engine for browser and Node 项目地址: https://gitcode.com/gh_mirrors/mi/minisearch MiniSear…...
)
从‘localhost:8080’到‘dev.myapp.com’:给本地服务绑个‘正经’域名的三种方法(Nginx/Docker/系统Hosts)
从‘localhost:8080’到‘dev.myapp.com’:本地服务域名绑定的实战指南 每次调试前端页面时,在浏览器地址栏反复输入localhost:3000或127.0.0.1:8080,这种体验总让人感觉像是在用临时解决方案应付正式开发需求。想象一下,当你的团…...

开源视频下载工具downkyi:高效管理B站资源的全流程指南
开源视频下载工具downkyi:高效管理B站资源的全流程指南 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等&…...