PCL内置点云类型
PCL内置了许多点云类型供我们使用,下面先介绍PLC内置的点云数据类型
PCL中的点云类型为PointT;至于为什么是PointT类型需要追随到原来的ros开发中去,因为PCL库也是从原来的ROS中剥离出来的;大家都一致的认为点云结构是离散的N维信息描述的物体。因此最简单的点云结构便是XYZ,下面首先来看看XYZ三维信息如何在PCL中实现的。
1 PointXYZ
最简单的XYZ点云结构体,包含X,Y,Z信息和一个padding;此处额外增加一个padding是为了满足支持SSE指令集的处理器,并实现SIMD向量化加速而额外添加的一个信息,该信息无实际意义;如果你觉得这里使用浪费了内存资源,你可以去掉最后一个padding维度并使用简单的XYZ来代表一个点云数据。
struct PointXYZ
{float x;float y;float z;float padding;
};如下是之前已经演示过的一个简答示例:
该示例创建了一个PointXYZ类型的点云数据,并向其中随机添加了1000个点云信息。
其中
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/common.h>int main(int argc, char **argv) {pcl::PointCloud<pcl::PointXYZ> cloud;// Fill in the cloud data/* pcl中的点云分为有序点云与无序点云:* 1、有序点云类使用深度相机生成的点云数据,该点云数据有指定的宽高,* 有序点云数据的可以轻松的获取相邻点的信息,这可以极大的提升某些点云算法的运算效率** 2、无序点云就是常规的点云数据,无序点云的height始终为1,width为点云的个数**///可以自行切换下面的注释,看看有什么区别
// cloud.width = 640; // Image-like organized structure, with 480 rows and 640 columns,
// cloud.height = 480; // thus 640*480=307200 points total in the datasetcloud.width = 640*480; // unorganized point cloud dataset with 307200 pointscloud.height = 1;//is_dense 指定points中的信息数据是否全部是有效数值的,是则为true;// 当数据集中包含有Inf/NaN等无效值时,此时为false。cloud.is_dense = false;cloud.points.resize(cloud.width * cloud.height);for (auto &point: cloud) {point.x = 1024 * rand() / (RAND_MAX + 1.0f);point.y = 1024 * rand() / (RAND_MAX + 1.0f);point.z = 1024 * rand() / (RAND_MAX + 1.0f);}for (auto &point: cloud) {std::cout << point.x << point.y << point.z << std::endl;}pcl::io::savePCDFileASCII("test_pcd.pcd", cloud);std::cerr << "Saved " << cloud.size() << " data points to test_pcd.pcd." << std::endl;for (const auto &point: cloud)std::cerr << " " << point.x << " " << point.y << " " << point.z << std::endl;//判断点云是否为有序点云if (!cloud.isOrganized ()){std::cout<<"该点云为无序点云"<<std::endl;}return (0);
}
2 PointXYZI
PointXYZI包含点云的坐标XYZ和该点的强度(intensity)信息,大家可能会觉得多了一个强度信息就可以使用强度信息替换掉PointXYZ中被无效占用的padding;但是实际上他的存储是这样的:
union
{float data[4];struct{float x;float y;float z;};
};
union
{struct{float intensity;};float data_c[4];
};点云还是占用了4个float空间,一个强度信息也占用了4个float空间;这样的原因如下:
1 大多数的SE3变换中最后一行的元素都是0或者1,如果此时将强度信息与点xyz整合在一块内存区域,那么这其中的点乘操作会使得第四个维度的强度信息无意义;因此不如分开存放并进行内存对齐,有利于SSE的SIMD运算
3 PointXYZRGBA
PointXYZRGBA点云类型包含了xyz与std::uint32_t rgba类型的颜色信息
注:此处的嵌套union结构为历史原因导致,应该在新的代码中舍弃
union
{float data[4];struct{float x;float y;float z;};
};
union
{union{struct{std::uint8_t b;std::uint8_t g;std::uint8_t r;std::uint8_t a;};float rgb;};std::uint32_t rgba;
};4 PointNormal
点云中另外一种常见的数据类型是PointNormal,其中normal代表该点的法向量信息,与前面的PointXYZI一样,此处为了计算效率也使用了额外的数据进行对齐
union
{float data_n[4];float normal[3];struct{float normal_x;float normal_y;float normal_z;};
}
union
{struct{float curvature;};float data_c[4];
};5 衍生类型
其他的类型还包括如下几个:
PointWithRange - float x, y, z (union with float point[4]), range;点和距离信息,常见于RGBD图像
PointXYZRGBNormal - float x, y, z, normal[3], curvature; std::uint32_t rgba;点与颜色和法线信息
PointXYZINormal - float x, y, z, intensity, normal[3], curvature;点强度与法线信息
PointWithScale - float x, y, z, scale;点与尺度信息,可以进行缩放操作
PointWithViewpoint - float x, y, z, vp_x, vp_y, vp_z;点与视场角信息
PointXY - float x,y;简单的二维结构,仅保存关键点信息
相关文章:

PCL内置点云类型
PCL内置了许多点云类型供我们使用,下面先介绍PLC内置的点云数据类型 PCL中的点云类型为PointT;至于为什么是PointT类型需要追随到原来的ros开发中去,因为PCL库也是从原来的ROS中剥离出来的;大家都一致的认为点云结构是离散的N维信…...

clickhouse数据结构和常用数据操作
背景, 大数据中查询用mysql时间太长, 使用clickhouse 速度快, 数据写入mysql后同步到clickhouse中 测试1千万数据模糊搜索 mysql 需要30-40秒 clickhouse 约 100ms 一 数据结构和存储引擎 1 查看clickhouse所有数据类型 select * from system.data_type_families; 2 …...
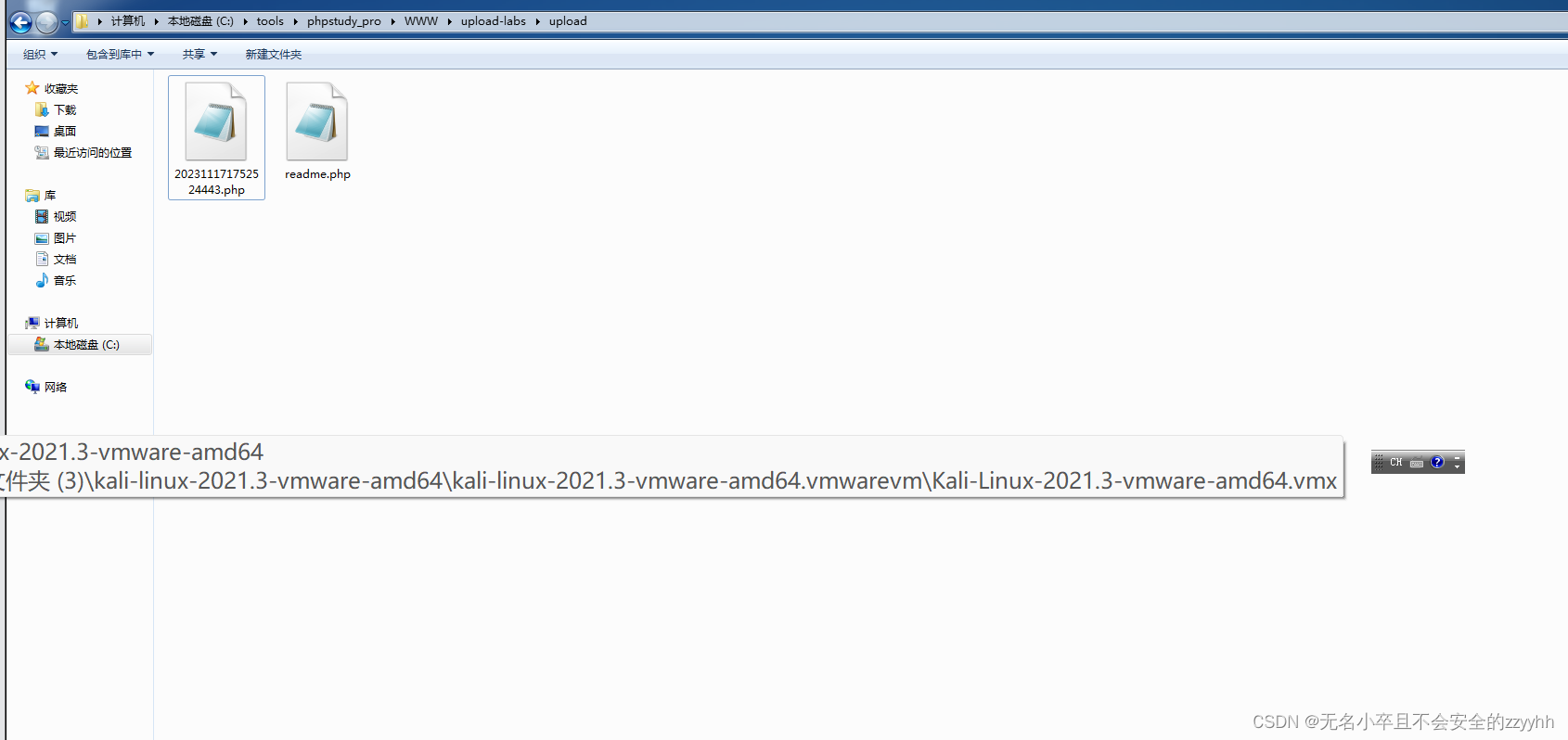
upload-labs关卡9(基于win特性data流绕过)通关思路
文章目录 前言一、靶场需要了解的知识1::$data是什么 二、靶场第九关通关思路1、看源码2、bp抓包修改后缀名3、检查是否成功上传 总结 前言 此文章只用于学习和反思巩固文件上传漏洞知识,禁止用于做非法攻击。注意靶场是可以练习的平台,不能随意去尚未授…...

C++过河卒问题
#include <iostream> #include <cstring> using namespace std;int board[20][20]; // 棋盘 int dp[20][20][20][20]; // 动态规划数组int main() {int x0, y0, x1, y1;cin >> x0 >> y0 >> x1 >> y1; // 输入卒的起点和终点memset(board,…...
【机器学习12】集成学习
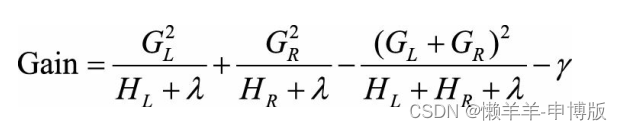
1 集成学习分类 1.1 Boosting 训练基分类器时采用串行的方式, 各个基分类器之间有依赖。每一层在训练的时候, 对前一层基分类器分错的样本, 给予更高的权重。 测试时, 根据各层分类器的结果的加权得到最终结果。 1.2 Bagging …...

nodeJs基础笔记
title: nodeJs基础笔记 date: 2023-11-18 22:33:54 tags: 1. Buffer 1. 概念 Buffer 是一个类似于数组的 对象 ,用于表示固定长度的字节序列。 Buffer 本质是一段内存空间,专门用来处理 二进制数据 。 2. 特点 Buffer 大小固定且无法调整Buffer 性能…...
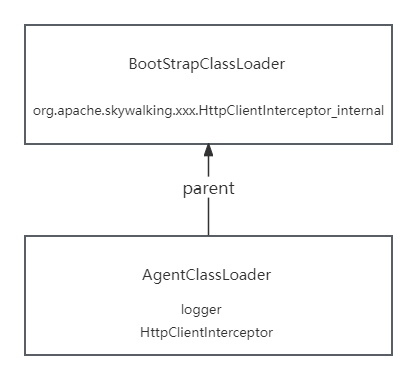
Skywalking流程分析_9(JDK类库中增强流程)
前言 之前的文章详细介绍了关于非JDK类库的静态方法、构造方法、实例方法的增强拦截流程,本文会详细分析JDK类库中的类是如何被增强拦截的 回到最开始的SkyWalkingAgent#premain try {/** 里面有个重点逻辑 把一些类注入到Boostrap类加载器中 为了解决Bootstrap类…...
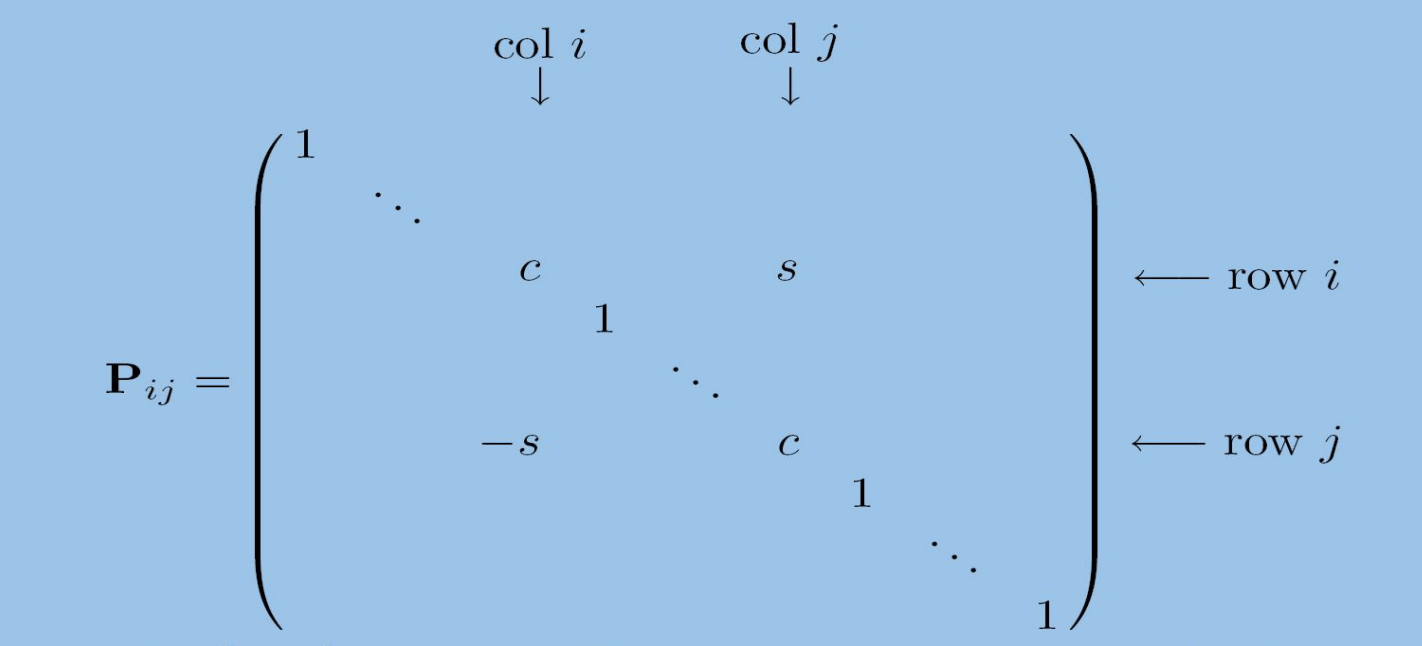
矩阵的QR分解
矩阵的QR分解 GramSchmidt 设存在 B { x 1 , x 2 , … , x n } \mathcal{B}\left\{\mathbf{x}_{1},\mathbf{x}_{2},\ldots,\mathbf{x}_{n}\right\} B{x1,x2,…,xn}在施密特正交化过程中 q 1 x 1 ∣ ∣ x 1 ∣ ∣ q_1\frac{x_1}{||x_1||} q1∣∣x1∣∣x1 q k …...

STL总结
STL vector 头文件<vector> 初始化,定义,定义长度,定义长度并且赋值,从数组中获取数据返回元素个数size()判断是否为空empty()返回第一个元素front()返回最后一个数back()删除最后一个数pop_back()插入push_back(x)清空clear()begin()end()使用s…...
资深测试总结,现在软件测试有未来吗?“你“的底气在哪里?
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 1、为什么会有 “…...

Scalable Exact Inference in Multi-Output Gaussian Processes
Orthogonal Instantaneous Linear Mixing Model TY are m-dimensional summaries,ILMM means ‘Instantaneous Linear Mixing Model’,OILMM means ‘Orthogonal Instantaneous Linear Mixing Model’ 辅助信息 作者未提供代码...
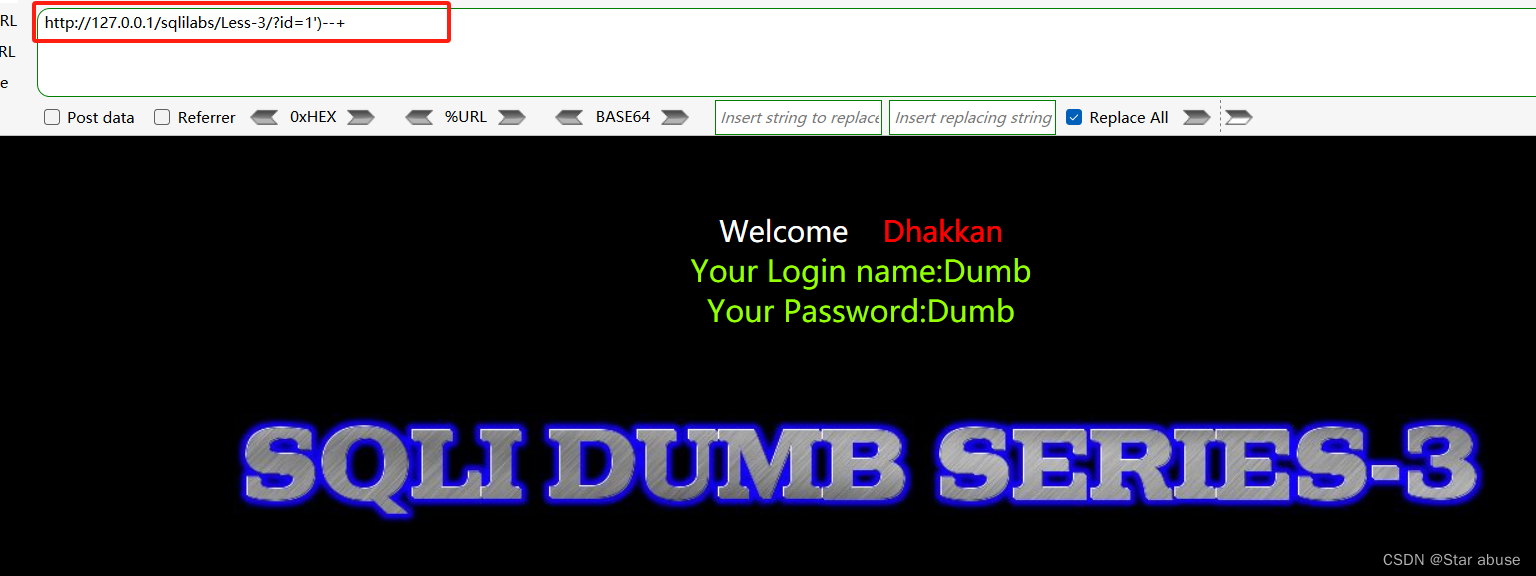
sqli-labs(Less-3)
1. 通过构造id1’ 和id1’) 和id1’)–确定存在注入 可知原始url为 id(‘1’) 2.使用order by 语句猜字段数 http://127.0.0.1/sqlilabs/Less-3/?id1) order by 4 -- http://127.0.0.1/sqlilabs/Less-3/?id1) order by 3 --3. 使用联合查询union select http://127.0.0.1…...

集合框架面试题
一、集合容器的概述 1. 什么是集合 集合框架:用于存储数据的容器。 集合框架是为表示和操作集合而规定的一种统一的标准的体系结构。 任何集合框架都包含三大块内容: 对外的接口、接口的实现和对集合运算的算 法。 接口:表示集合的抽象数据…...

【LeetCode刷题日志】225.用队列实现栈
🎈个人主页:库库的里昂 🎐C/C领域新星创作者 🎉欢迎 👍点赞✍评论⭐收藏✨收录专栏:LeetCode 刷题日志🤝希望作者的文章能对你有所帮助,有不足的地方请在评论区留言指正,…...

【JavaScript】fetch 处理流式数据,实现类 chatgpt 对话
本文只包含最基础的请求后端大佬给得对话接口,大部分模型的传参是差不多的,核心还是如何处理 fetch 获取的流数据 import { defineStore } from pinia; import { ElMessage } from element-plus;type Role system | user | assistant; export interfac…...

收发电子邮件
电子邮件是Internet提供的又一个重要服务项目。早在1987年9月20日,中国首封电子邮件就是从北京经意大利向前联邦德国卡尔斯鲁厄大学发出的,在中国首次实现了与Internet的连接,使中国成为国际互联网大家庭中的一员。现在随着Internet的迅速发展…...
)
sql13(Leetcode570至少有5名直接下属的经理)
代码: 脑子记不住 语法全靠试.. # Write your MySQL query statement below select b.name from (select managerId,count(managerId) as numfrom Employeegroup by managerId ) a left join Employee b on a.managerIdb.id where a.num>5 and b.name is not N…...

15分钟,不,用模板做数据可视化只需5分钟
测试显示,一个对奥威BI软件不太熟悉的人来开发数据可视化报表,要15分钟,而当这个人去套用数据可视化模板做报表,只需5分钟! 数据可视化模板是奥威BI上的一个特色功能板块。用户下载后更新数据源,立即就能获…...

C 语言字符串函数
C 语言字符串函数 在本文中,您将学习使用诸如gets(),puts,strlen()等库函数在C中操作字符串。您将学习从用户那里获取字符串并对该字符串执行操作。 您通常需要根据问题的需要来操作字符串。大多数字符串操作都可以自定义方法完成ÿ…...
nvm安装详细教程(卸载旧的nodejs,安装nvm、node、npm、cnpm、yarn及环境变量配置)
文章目录 一、完全卸载旧的nodejs1、打开系统的控制面板,点击卸载程序,卸载nodejs(1)打开系统的控制面板,点击程序下的卸载程序(2)找到node.js,鼠标右击出现下拉框,点卸载…...

打不开JupyterLab
因为安装某些依赖导致JupyterLab的依赖被动升级或降级,从而影响了JupyterLab的运行,此时可以SSH登录到实例,然后输入jupyter-lab命令进行确认,如果执行命令报错则说明是此问题,那么可以通过pip install jupyterlab再次…...

双稳健机器学习:用正交性与交叉拟合解决因果推断中的ML偏差
1. 项目概述:当机器学习遇见因果推断的“干扰”难题在实证研究的日常工作中,我们常常面临一个核心矛盾:我们真正关心的,往往只是一个或几个关键参数——比如一项政策对就业率的平均影响(平均处理效应,ATE&a…...

3分钟掌握JetBrains IDE试用期重置:终极完整指南
3分钟掌握JetBrains IDE试用期重置:终极完整指南 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter JetBrains IDE试用期重置工具(ide-eval-resetter)是一个开源项目,专…...

告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南
告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南第一次点击"打包项目"按钮时,进度条仿佛被冻结的场景,每个UE5开发者都经历过。尤其当项目规模达到数十GB时,等待时间可能超过一小时——这背后隐藏着引擎底…...

开源三角洲机器人Delta-Robot One:从入门到精通的创客实践指南
1. 项目概述:一个为学习而生的开源三角洲机器人如果你对机器人感兴趣,但又觉得它高深莫测、无从下手,那么Delta-Robot One(我们亲切地称它为“One”)可能就是为你量身打造的入门项目。这不是一个遥不可及的工业设备&am…...

TorchEasyRec:阿里巴巴开源的推荐系统深度学习框架详解
第一部分:项目概览与核心功能 一、项目简介:什么是 TorchEasyRec? TorchEasyRec 是阿里巴巴 PAI 团队开发的基于 PyTorch 的推荐系统框架,专门用于构建生产级别的深度学习推荐模型。简单来说,它就是一个让你能够快速…...

当卫星在天上“读懂”人间:ICLR 2025 论文深度解读师玉娇、昃向辉的CS2S
把一张卫星图变成一张街景照片,就像把一个俯视棋盘拼成一面看台——不仅要摆对每一枚棋子,还要看懂整场比赛想象这样一个场景:你在城市规划部门工作,需要快速生成某条街道在不同季节、不同天气条件下的真实渲染效果,以…...

AFOAuth2Manager调试技巧:常见问题排查与解决方案
AFOAuth2Manager调试技巧:常见问题排查与解决方案 【免费下载链接】AFOAuth2Manager AFNetworking Extension for OAuth 2 Authentication 项目地址: https://gitcode.com/gh_mirrors/af/AFOAuth2Manager AFOAuth2Manager是AFNetworking的OAuth 2.0认证扩展库…...
的使用场景)
Python运算符:成员运算符(in/not in)的使用场景
Python运算符:成员运算符(in/not in)的使用场景📚 本章学习目标:深入理解成员运算符(in/not in)的使用场景的核心概念与实践方法,掌握关键技术要点,了解实际应用场景与最…...

网页高亮神器Highlighter:3分钟掌握永久标记网页内容的终极技巧
网页高亮神器Highlighter:3分钟掌握永久标记网页内容的终极技巧 【免费下载链接】highlighter A Chrome extension to highlight text and keep it all saved 项目地址: https://gitcode.com/gh_mirrors/hig/highlighter 在信息爆炸的数字时代,你…...