四旋翼无人机的飞行原理--【其利天下分享】
近年来,无人机在多领域的便捷应用促使其迅猛的发展,如近年来的多场战争,无人机的战场运用发挥得淋漓尽致。
下面我们针对生活中常见的四旋翼无人机的飞行原理做个基础的介绍,以飨各位对无人机有兴趣的朋友。

一:四旋翼无人机的两种结构模型介绍;
一般情况下,根据四旋翼无人机上马达分部的相对位置将四旋翼无人机分为如下两种结构模式
- “×”字模式: Pitch和 Roll与1,3、2,4两组电机呈 45°夹角 。
- “十”字模式: Pitch对应2,4电机的对轴,Roll对应1,3电机的对轴,夹角为0。
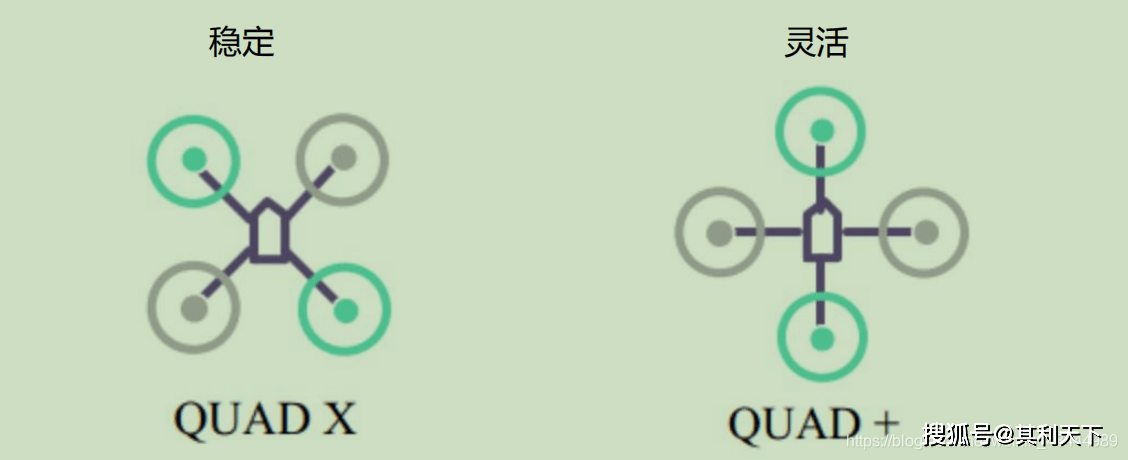
一般的无人机基本都采用“X”字模式的结构。“X”型无人机优点是控制灵活,同样是俯仰运动中,“x”型无人机需要控制四个电机;具体表现为,前两个电机转速同时增大(减小),后两个电机转速同时减小(增大)。因为其运动是四个电机转速同时变化,运动(俯仰运动)的合力来源于四个电机(“+”型只有前后两个电机提供力),所以其运动的加速度更快,运动更加灵活。但是同样,控制四个电机使飞行器稳定的难度要大于控制两个电机,所以控制难度高是“X”型无人机一个缺点。鉴于现阶段商业飞控,开源飞控都已经有很成熟的算法控制飞行器稳定飞行,且“X”型飞行器易于悬挂云台,所以市面上的四轴飞行器绝大部分都是“X”型或“H”型,很少看到有“+”型。
“H”型无人机类似于“X”型,这里就不过多赘述了。只讲其一个缺点,“H”型无人机因为物理结构问题,其飞行器的腰部很容易扭折,所以市面上的“H”型无人机都会对腰部进行加固,但是如果操作不当,还是容易损坏。
“+”型的四轴飞行器因为其电机布局和两个姿态角(俯仰角和翻滚角)重合,其控制难度较小。举个例子,“+”型飞行器想要进行俯仰运动时,只需控制前后两个电机的转速,左右电机转速保持不变即可,所以其控制飞行器稳定的难度较小,相对来说易于控制。
二:四旋翼飞行器的6个自由度介绍;
四旋翼飞行器的旋翼结构如图2-2所示。飞行时,以1号电机为机头,3号电机为机尾,2号和4号电机分别位于机身的左、右侧。当飞行器平衡飞行时,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转以抵消电机在高速旋转时产生的陀螺效应和空气动力扭矩效应使飞行器发生自旋。四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),对每个自由度的控制我们都可以通过调节不同电机的转速来实现。下面逐个说明飞行器的各种飞行姿态。
(1)垂直运动
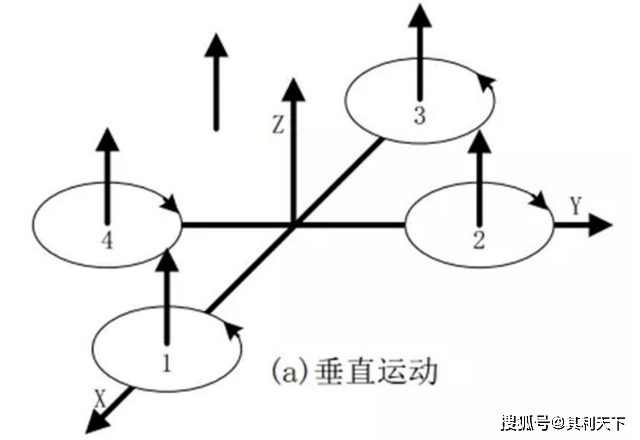
图2-2 垂直运动时无人机受力分析图
如上图,1号和3号电机逆时针旋转,2号和4号电机顺时针旋转来平衡其对机身的反扭矩。如果同时增加四个电机的转速(图中各个电机中心引出的向上箭头表示加速,若箭头向下表示减速),每个电机带动螺旋桨产生更大的升力,当合力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机转速,四旋翼飞行器则垂直下降,当旋翼产生的升力等于飞行器的自重且无外界干扰时,飞行器便可保持悬停状态。
(2)俯仰运动
如图2-3所示,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变(图中各个电机中心引出的向上箭头表示加速,若箭头向下表示减速,没有箭头表示速度不变)。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕Y轴旋转(方向如图2-3所示)。同理,当电机1的转速下降,电机3的转速上升时,机身便绕Y轴反方向旋转。实现了飞行器的俯仰运动。
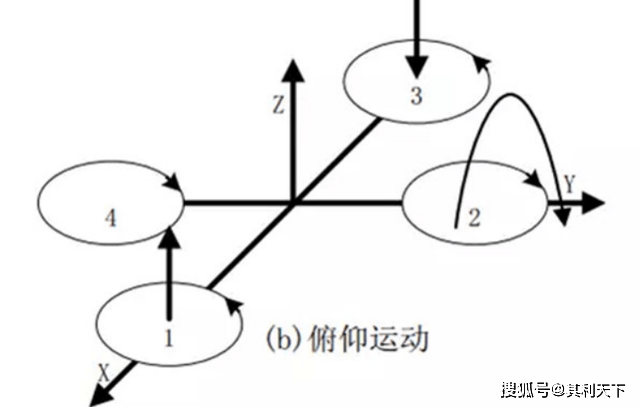
图2-3 俯仰运动时无人机受力分析图
(3)滚转运动
与图2-3的原理相同,在图2-4中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕X轴旋转(正向和反向),实现飞行器的左右滚转运动。
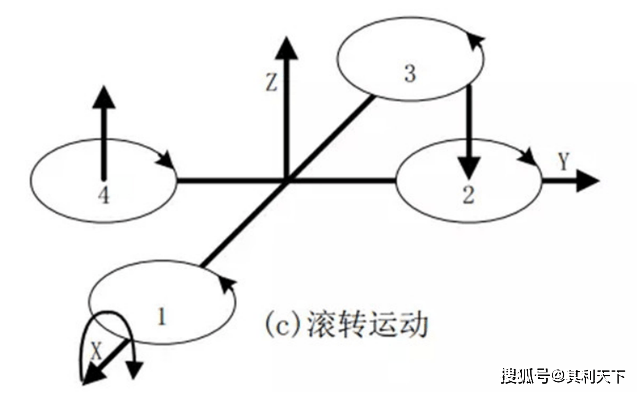
图2-4 滚转运动时无人机受力分析图
(4)偏航运动
如图2-5所示,四旋翼飞行器偏航运动就是绕自身垂直轴Z轴旋转,可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩。为了克服反扭矩的影响,可使四个旋翼中的两个正转,两个反转,且对角线上的电机转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。
在图2-5中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在不平衡反扭矩的作用下绕Z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
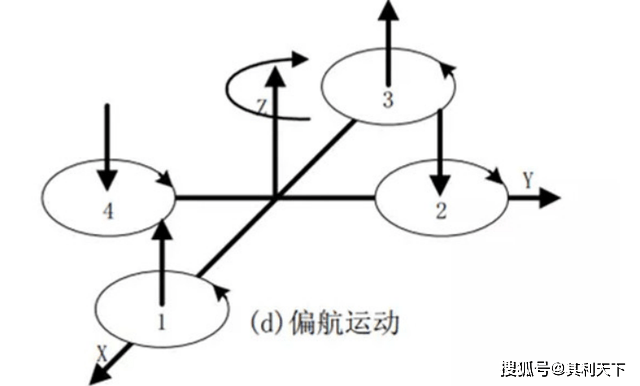
图2-5 偏航运动时无人机受力分析图
(5)前后运动
如图2-6所示,增加电机3转速,使尾部拉力增大;相应减小电机1转速,使头部拉力减小;同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图2-3的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动(向后飞行与向前飞行正好相反)。当然在图2-3,图2-4中,飞行器在产生俯仰、翻滚运动的同时也会产生沿X、Y轴的水平运动。

图2-6 前后运动时无人机受力分析图
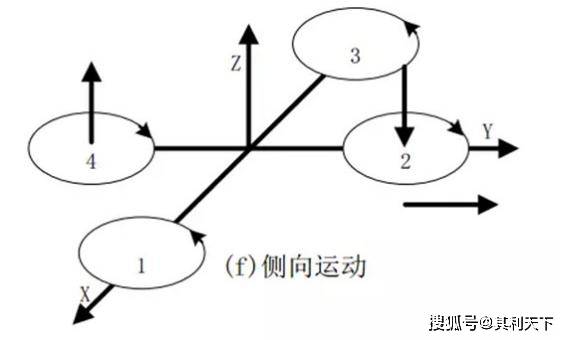
(6)侧向运动
在图2-7中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。
相关文章:
四旋翼无人机的飞行原理--【其利天下分享】
近年来,无人机在多领域的便捷应用促使其迅猛的发展,如近年来的多场战争,无人机的战场运用发挥得淋漓尽致。 下面我们针对生活中常见的四旋翼无人机的飞行原理做个基础的介绍,以飨各位对无人机有兴趣的朋友。 一:四旋翼…...

webpack的安全保障是怎么做的?
文章目录 前言Webpack 内容安全策略后言 前言 hello world欢迎来到前端的新世界 😜当前文章系列专栏:webpack 🐱👓博主在前端领域还有很多知识和技术需要掌握,正在不断努力填补技术短板。(如果出现错误,感…...

Python3.10的一些新特性与使用场景
Python 3.10的新特性不仅增强了语言的功能性,也提供了更丰富的工具,让开发者能更高效、更准确地编写代码。接下来将通过一些实际的使用场景和方法来探索这些新特性。 1. “精确类型”参数化内置集合 Python 3.10引入了更精确的方式来指定内置集合的类型…...
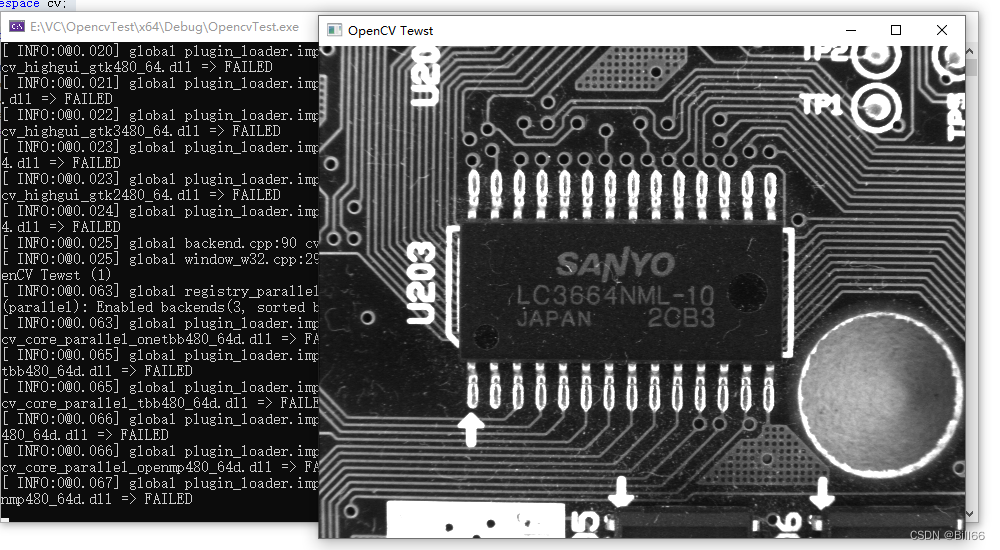
VS2022 配置 OpenCV并开始第一个程序
VS2022安装 首先下载 VisualStudioSetup.exe 下载连接:Visual Studio 2022 IDE - 适用于软件开发人员的编程工具 点击上面的链接即可进入到下载页面。进入到下载页面,可看到有几个版本可选,如下: 我选择的是企业版:E…...
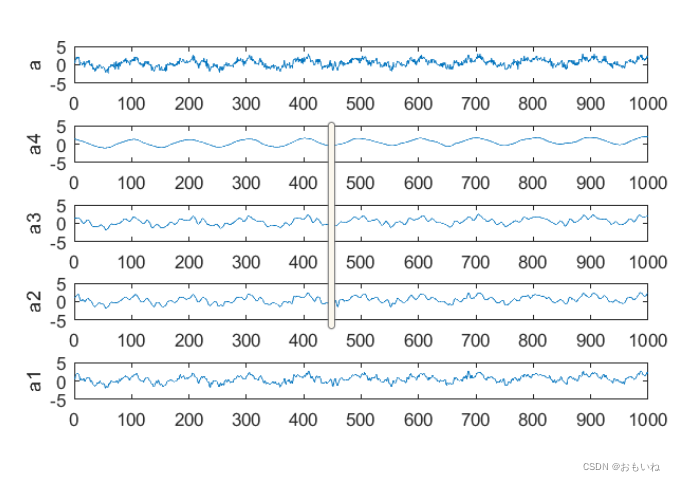
图像处理01 小波变换
一.为什么需要离散小波变换 连续小波分解,通过改变分析窗口大小,在时域上移动窗口和基信号相乘,最后在全时域上整合。通过离散化连续小波分解可以得到伪离散小波分解, 这种离散化带有大量冗余信息且计算成本较高。 小波变换的公…...
构建自定义ChatGPT,微软推出Copilot Studio
11月16日,微软在美国西雅图举办“Microsoft Ignite 2023”全球开发者大会。本次人工智能成为重要主题,微软几乎把所有产品都集成了生成式AI功能并发布了一系列全新产品。 其中,微软重磅推出了Copilot Studio(预览版)&…...
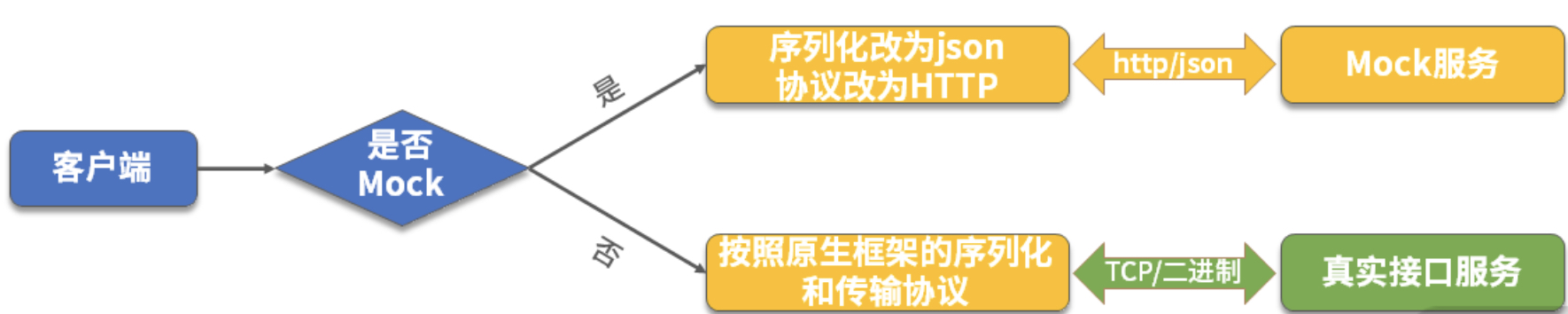
什么是Mock?为什么要使用Mock呢?
1、前言 在日常开发过程中,大家经常都会遇到:新需求来了,但是需要跟第三方接口来对接,第三方服务还没好,我们自己的功能设计如何继续呢?这里,给大家推荐一下Mock方案。 2、场景示例 2.1、场景一…...

elementui表格自定义指令控制显示哪些列可以拖动
Vue.directive(tableBorder, function (el, {value}) {// value允许传字符串数字和数组el.classList.add(z_table_hasBorder)let hasStyle el.querySelector(style)if(hasStyle){hasStyle.remove()}let style document.createElement(style)let str .z_table_hasBorder .el…...
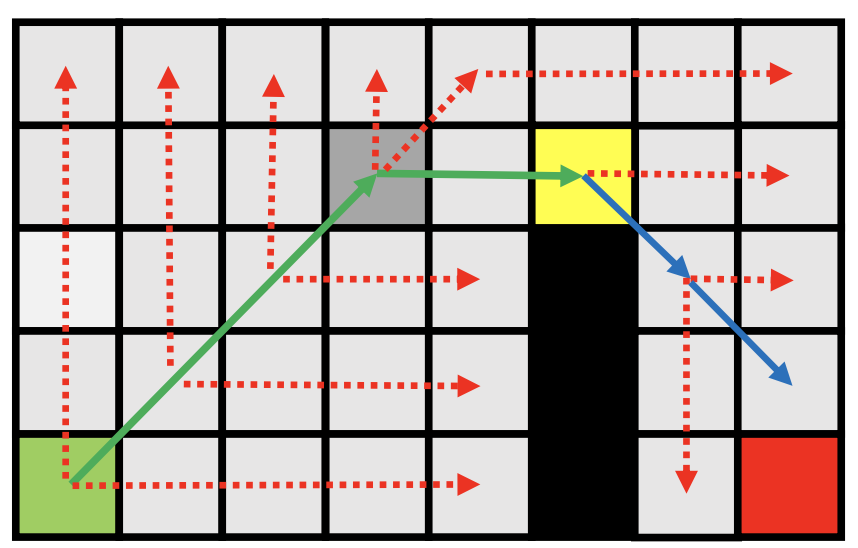
Motion Plan之搜素算法笔记
背景: 16-18年做过一阵子无人驾驶,那时候痴迷于移动规划;然而当时可学习的资料非常少,网上的论文也不算太多。基本就是Darpa的几十篇无人越野几次比赛的文章,基本没有成系统的文章和代码讲解实现。所以对移动规划的认…...

新中新身份证阅读器驱动下载sdk DKQ-A16D
读取操作 int nRet;string sMsg "";IDCardData idcardData new IDCardData();byte[] ctmp new byte[255];ReadCardAPI.Syn_SetPhotoPath(1, ref ctmp);setupDataFormate(1);nRet ReadCardAPI.Syn_OpenPort(Main_Form.m_iPort);if (nRet 0){DateTime startTime …...
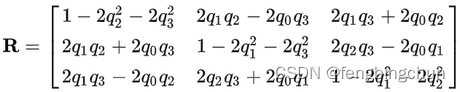
世界坐标系,相机坐标系,像素坐标系转换 详细说明(附代码)
几个坐标系介绍,相机内外参的回顾参考此文。 本文主要说明如何在几个坐标系之间转换。 本文涉及: 使用相机内参 在 像素坐标系 和 相机坐标系 之间转换。使用相机外参(位姿)在相机坐标系 和 世界坐标系 之间转换。(qw,qx,qy,qz,…...
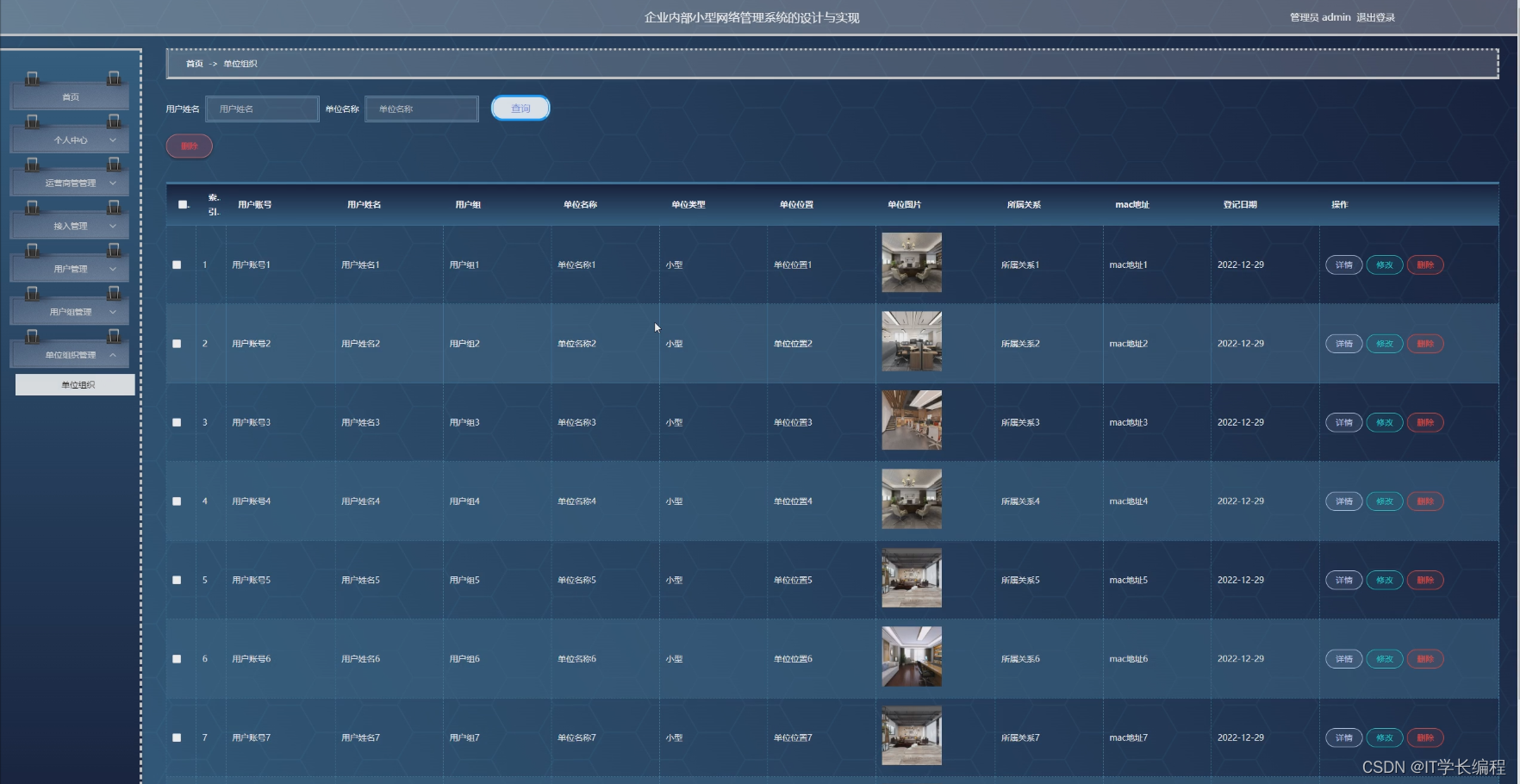
计算机毕业设计 基于SpringBoot的企业内部网络管理系统的设计与实现 Java实战项目 附源码+文档+视频讲解
博主介绍:✌从事软件开发10年之余,专注于Java技术领域、Python人工智能及数据挖掘、小程序项目开发和Android项目开发等。CSDN、掘金、华为云、InfoQ、阿里云等平台优质作者✌ 🍅文末获取源码联系🍅 👇🏻 精…...
)
CISP模拟试题(三)
免责声明 文章仅做经验分享用途,利用本文章所提供的信息而造成的任何直接或者间接的后果及损失,均由使用者本人负责,作者不为此承担任何责任,一旦造成后果请自行承担!!! 1. 人们对信息安全的认识从信息技术安全发展到信息安全保障,主要是由于: A.为了更好地完成组…...

前端调取摄像头并实现拍照功能
前言 最近接到的一个需求十分有意思,设计整体实现了前端仿 微信扫一扫 的功能。整理了一下思路,做一个分享。 tips: 如果想要实现完整扫一扫的功能,你需要掌握一些前置知识,这次我们先讲如何实现拍照并且保存的功能。 一. wind…...

android —— 阴影效果和跑马灯效果Textview
1、带阴影的TextView ①、 android:shadowColor“color/black” 设置阴影颜色,需要与shadowRadius一起使用 ②、android:shadowRadius“3.0” 设置阴影模糊程度,设为0.1会变成字体颜色,建议设置3.0 ③、android:shadowDx“10” 设置阴影在水…...
多态语法详解
多态语法详解 一:概念1:多态实现条件 二:重写:三:向上转型和向下转型1:向上转型:1:直接赋值:2:方法传参3:返回值 2:向下转型 一:概念 1:同一个引…...

Python大数据之linux学习总结——day11_ZooKeeper
ZooKeeper ZK概述 ZooKeeper概念: Zookeeper是一个分布式协调服务的开源框架。本质上是一个分布式的小文件存储系统 ZooKeeper作用: 主要用来解决分布式集群中应用系统的一致性问题。 ZooKeeper结构: 采用树形层次结构,ZooKeeper树中的每个节点被称为—Znode。且树…...
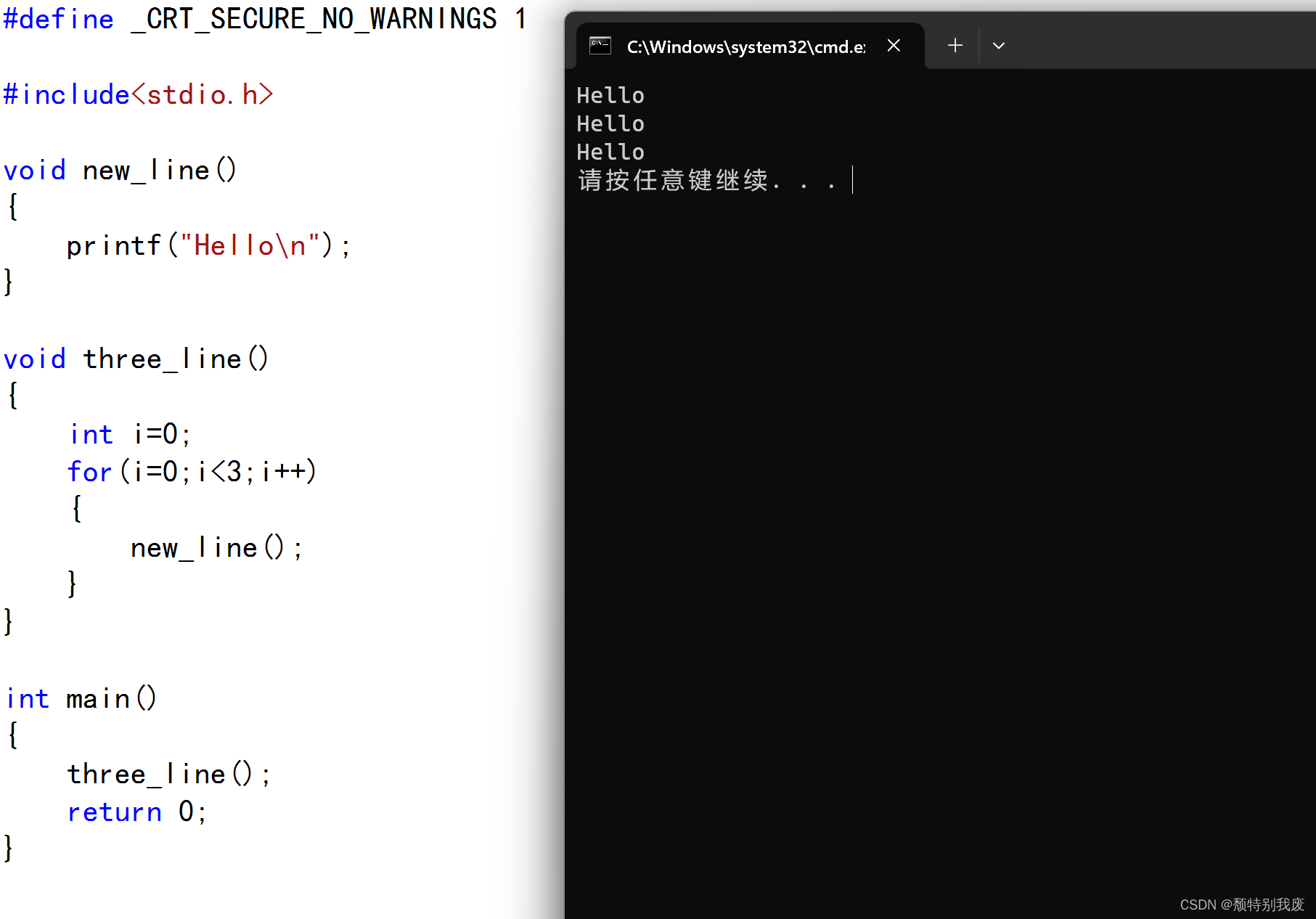
C语言——函数的嵌套调用
#define _CRT_SECURE_NO_WARNINGS 1#include<stdio.h>void new_line() {printf("Hello\n"); }void three_line() {int i0;for(i0;i<3;i){new_line();} }int main() {three_line();return 0; }...
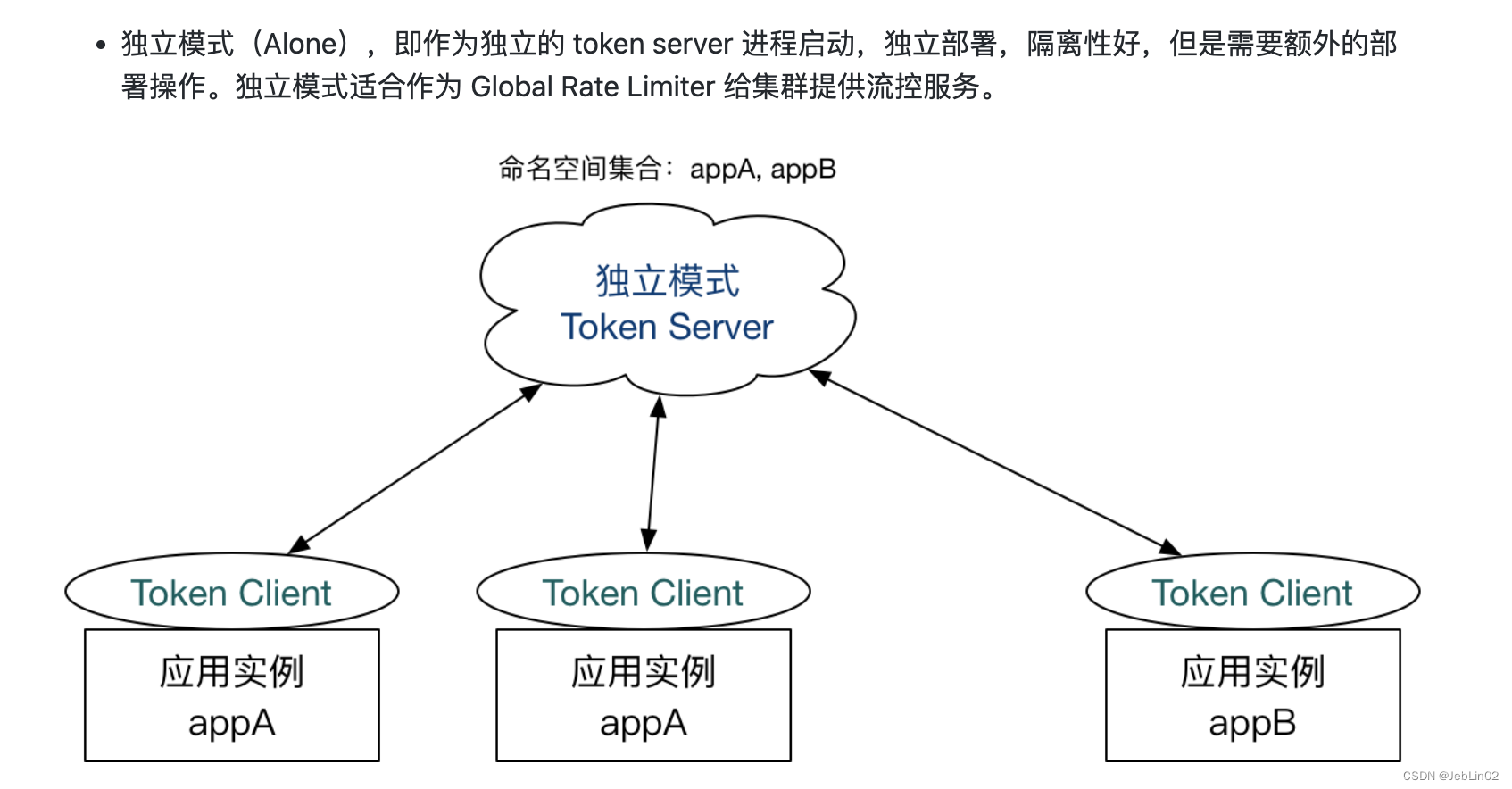
4种经典的限流算法与集群限流
0、基础知识 1000毫秒内,允许2个请求,其他请求全部拒绝。 不拒绝就可能往db打请求,把db干爆~ interval 1000 rate 2; 一、固定窗口限流 固定窗口限流算法(Fixed Window Rate Limiting Algorithm)是…...

网工内推 | 国企、港企网工,年底双薪,NA以上认证即可
01 中航期货有限公司 招聘岗位:信息技术部-网络工程师 职责描述: 1、负责总部、分支机构、外联单位网络的日常运维、故障和应急处置,特别是定期监测设备的运行状态,对存在隐患的地方及时发现改正,保持网络稳定通畅&am…...
)
模拟几种数据融合协作频谱感知技术在认知无线电应用中性能研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
的电动汽车充电行为场景生成研究( Python + PyTorch实现))
【顶级EI复现】基于去噪概率扩散模型(DDPM)的电动汽车充电行为场景生成研究( Python + PyTorch实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 🎁…...

B站直播神器:神奇弹幕全方位操作指南
B站直播神器:神奇弹幕全方位操作指南 【免费下载链接】MagicalDanmaku 本仓库及所有相关项目已永久停止开发、维护和任何形式的分发。 项目地址: https://gitcode.com/gh_mirrors/bi/MagicalDanmaku 直播难题:为什么你需要智能弹幕助手 每个B站主…...
 - 第二期)
【期刊征稿 | 录用后最快当月见刊,刊后1个月检索,且检索稳定】第九届艺术、教育与管理国际学术会议(ICAEM 2026) - 第二期
录用后最快当月见刊,刊后1个月检索,且检索稳定 | 含ISSN号,DOI,封面目录 第九届艺术、教育与管理国际学术会议(ICAEM 2026) - 第二期 2026 9th International Conference on Arts, Education and Management 2026年…...

机器学习驱动的中微子-核散射截面建模:从数据学习到振荡分析
1. 项目概述与核心价值 中微子物理正步入一个前所未有的“精密测量”时代。像DUNE(深地下中微子实验)这样的下一代长基线实验,目标是将中微子混合参数的测量精度推至百分之一量级。然而,一个长期存在的“拦路虎”限制了这一目标的…...

【204期】异地组网一键联机工具
想和朋友异地联机打单机游戏,结果发现没有公网IP连不上?或者居家办公想访问公司局域网里的文件,搞了半天搞不定?今天聊的这类异地组网、内网穿透工具,就是专门解决这些问题的。它能把一个个单独的局域网连接起来&#…...

用强化学习训练 Agent:从随机尝试到精通复杂任务
用强化学习训练 Agent:从随机尝试到精通复杂任务 副标题: 深度解析马尔可夫决策过程、Q学习、DQN、PPO四大核心支柱,附从OpenAI Gym经典项目实战与Atari Pong完整训练代码 第一部分:引言与基础 (Introduction & Foundation) 1…...

146台储罐+10台喷淋塔,新能源项目为什么认准PPH?
在新能源材料项目的设备选型中,PPH正逐渐变成大多数厂家选择的一种材质。 最近美联新材料的新能源产业化项目,一口气向吉庆订了146台PPH贮罐、10台PPH喷淋塔,今天就借着这个真实项目,来聊一聊,PPH为什么能成成新能源项…...

水葫芦生长周期生长阶段早晚期检测数据集VOC+YOLO格式1029张3类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)图片数量(jpg文件个数):1029标注数量(xml文件个数):1029标注数量(txt文件个数):1029标注类别…...

哪个工具能降重降AI?亲测知网维普aigc检测效果,重复率和ai率不到10%!
2025 年 12 月 25 日知网 AIGC 检测系统升级,2026 年 4 月 27 日维普 AI 率检测平台升级…2026 毕业季,各大主流 AIGC 检测软件陆续升级系统,识别 AI 痕迹更加精准。 临近毕业,同学们看者飘红的 AIGC 检测报告、纷繁复杂的降 AI 系…...