数据集笔记:NGSIM (next generation simulation)
1 数据集介绍
数据介绍s Next Generation Simulation (NGSIM) Open Data (transportation.gov)
数据地址:Next Generation Simulation (NGSIM) Vehicle Trajectories and Supporting Data | Department of Transportation - Data Portal
| 时间 | 2005年到2006年间 |
| 地点 |
|
- 为每个地点收集和生成的数据集包括
- 车辆轨迹数据(主要数据)
- 从视频中转录车辆轨迹数据。
- 这些车辆轨迹数据每0.1秒就能精确地提供研究区域内每辆车的位置,从而得到详细的车道位置和相对于其他车辆的位置
- 对于四个NGSIM数据收集地点,存在着25列和超过1180万行的轨迹数据
- 其他特定地点的主要和支持数据
- 不同聚合水平(例如,30秒、5分钟或15分钟)的车辆流量和占有率(可能还包括速度值)(主要数据)
- 研究区域的正射矫正照片(支持数据)
- 使用正射矫正照片开发的研究区域的计算机辅助设计(CAD)图纸(支持数据)
- 信号和/或匝道计时(支持数据)
- 包括研究区域网络的几何形状和其他属性的地理信息系统(GIS)形状文件(支持数据)
- 带有聚合车辆轨迹结果的数据分析文件,提供常见的宏观交通流参数(支持数据)
- I-80 NGSIM地点还提供以下额外数据:
- 数据收集时期的旧金山机场的天气数据(支持数据)
- 路标照片(支持数据)
- 原始视频文件
- 原始的车辆运动数据
-
I-80 视频
2005年4月13日位于加利福尼亚州埃默里维尔的I-80路段
提供45分钟的视频数据,分为三个15分钟的时段:1)下午4:00到4:15;2)下午5:00到5:15;以及3)下午5:15到5:30
数据集包括来自七个摄像头的每个时间段的原始和处理过的视频文件
数据集包括来自七个摄像头的每个时间段的原始和处理过的视频文件

US-101 Videos
2005年6月15日位于加利福尼亚州洛杉矶的美国101号(好莱坞高速公路)的高速公路段收集的。
包含了45分钟的转录数据,分为三个15分钟的时段,分别代表:1) 上午7:50至8:05,2) 上午8:05至8:20,以及3) 上午8:20至8:35。
数据集包括每个摄像头的三个时间段的原始和处理过的视频文件。摄像头编号按从最南(1)到最北(8)的顺序排列

Lankershim Boulevard Videos
视频是在2005年6月16日位于加利福尼亚州洛杉矶兰克希姆大道上的一条干道段收集的。

数据代表了30分钟的视频,分为两个时段(上午8:30至8:45和上午8:45至9:00)。
数据集包括两个时间段的每个摄像头的原始和处理过的视频数据的文件。摄像头编号按从最南(1)到最北(5)的顺序排列。

Peachtree Street Videos
视频是在2006年11月8日位于佐治亚州亚特兰大的桃树街上的一条干道段收集的。
数据代表了30分钟的视频,分为两个时段(下午12:45至1:00和下午4:00至4:15)。
数据集包括两个时间段的每个摄像头的原始和处理过的视频数据的文件
。摄像头编号按从最南(1)到最北(8)的顺序排列。

- 处理过的视频文件
- 带有车辆识别号码叠加的车辆视频

- 车辆轨迹数据(主要数据)
1.1 轨迹数据集各列意义
| 列名 | 描述 |
|---|---|
| Vehicle_Id | 车辆识别号(根据进入该区域的时间升序),重复利用 |
| Frame_Id | 该条数据在某一时刻的帧(按开始时间升序),同一Vehicle_ID的帧号不会重复 |
| Total_Frame | 该车出现在此数据集的总帧数 |
| Global_Time | 时间戳(ms) |
| Local_X | 车辆前部中心的横向(X)坐标,以英尺为单位,相对于截面在行驶方向上的最左侧边缘。 |
| Local_Y | 车辆前部中心的纵向(Y)坐标,以英尺为单位,相对于截面在行驶方向上的进入边缘。 |
| 以上两个 | 采集区域内的坐标,采集区域不同,坐标系不同,会有不同的零点 |
| Global_X,Y | 全局坐标,只有一个零点,可用作数据筛选 |
| v_length | 车辆长度(以英尺为单位) |
| v_Width | 车辆长度(以英尺为单位) |
| v_Class | 车辆类型:1-摩托车,2-汽车,3-卡车 |
| v_Vel | 车辆瞬时速度,以英尺/秒为单位 |
| v_Acc | 车辆的瞬时加速度,以英尺/秒为单位 |
| Lane_ID | 车辆的当前车道位置。 第1车道是最左边的车道; 第5车道是最右边的车道。 |
| O_Zone | 车辆的起点区域,即车辆进入跟踪系统的位置。 研究区域有11个起源,编号从101到111。有关更多详细信息,请参阅数据分析报告。 |
| D_Zone | 车辆的目的地区域,即车辆离开跟踪系统的地方。 研究区域中有10个目的地,从201到211编号。起点102是单向出口; 因此,没有关联的目标号码202。请参阅数据分析报告以获取更多详细信息。 |
| Int_ID | 车辆行驶的路口。 交叉点的编号为1到4,交叉点1位于最南端,交叉点4位于研究区域的最北端。 值为“ 0”表示该车辆不在交叉路口的附近,而是该车辆标识为Lankershim Boulevard的一段(下面的Section_ID)。 请参阅数据分析报告以获取更多详细信息。 |
| Section_ID | 车辆行驶的路段。 Lankershim Blvd分为五个部分(路口1的南部;路口1和2、2和3、3和4之间;路口4的北部)。 值为“ 0”表示该车辆未识别出Lankershim Boulevard的一段,并且该车辆紧邻交叉路口(上述Int_ID)。 请参阅数据分析报告以获取更多详细信息 |
| Direction | 车辆的行驶方向。 1-东行(EB),2-北行(NB),3-西行(WB),4-南行(SB) |
| Movement | 车辆的运动。 1-通过(THE),2-左转(LEFT),3-右转(RT)。 |
| Preceding | 同道前车的车辆编号。数值为“0”表示没有前面的车辆-发生在研究段的末尾和出匝道 |
| Following | 在同一车道上跟随本车辆的车辆的车辆ID。 值“ 0”表示没有跟随的车辆-在研究部分的开头和匝道发生, |
| Space_Headway | 间距提供了车辆的前中心到前一辆车辆的前中心之间的距离。(英尺) |
| Time_Headway | 时间进度(以秒为单位)提供了从车辆的前中心(以车辆的速度)行进到前一辆车辆的前中心的时间。 |
| Location | 街道名称或高速公路名称 |
2 数据集的一些应用
- 利用下一代模拟轨迹数据估计加速度和变道动态
- 提出了一种轨迹平滑算法以消除噪音,并将其应用于NGSIM数据。
- 然后使用平滑后的NGSIM数据来估计密度函数、时间间隔和碰撞时间的分布,以及变道持续时间标准。
- 用于高速公路轨迹预测的LSTM网络:
- 使用NGSIM数据来训练和验证一个长短期记忆(LSTM)神经网络
- 该网络可以准确预测高速公路上车辆的未来纵向和横向轨迹。
- 这些预测旨在通过允许更好地理解周围车辆的意图来提高高级驾驶辅助系统(ADAS)的适应性。
- 在高速公路交通状态估计中加入拉格朗日测量:
- 提出技术将手机的移动探针测量集成到高速公路交通流模型中。
- NGSIM数据被用作基准数据集来验证和比较这两种方法。
- 在连接环境中建模变道行为:
- 博弈论方法:提出了一个基于博弈论方法的变道模型,考虑了连接车辆环境中的信息流。
- NGSIM数据集用于校准所提出的变道模型。
- 使用时空上下文检测异常视频事件:
- 提出了一种意识到上下文的视频事件检测方法,用于检测对象运动中的异常。
- NGSIM视频被用来测试和验证该方法在检测交通视频中的异常以及识别这些异常为危险和非法交通事件的能力。
- 自动驾驶车辆的社会行为:
- 提出了一个自动驾驶车辆控制器设计框架,其中包含了来自社会心理学的工具。
- NGSIM数据集用于验证所提出的算法,该算法控制自动驾驶车辆的驾驶,同时通过结合社会心理学预测人类驾驶的车辆轨迹。
- 驾驶行为模型中相关参数的研究——跟车例子及其对交通微观模拟的影响:
- 调查了忽略跟车模型三个参数相关性对衍生运动和异质交通模拟的交通特性的影响。
- NGSIM数据被用来校准跟车模型参数,并显示参数之间相关性的统计显著性。
参考内容:NGSIM数据集解析(含代码)_番茄炒狼桃的博客-CSDN博客
相关文章:
数据集笔记:NGSIM (next generation simulation)
1 数据集介绍 数据介绍s Next Generation Simulation (NGSIM) Open Data (transportation.gov) 数据地址:Next Generation Simulation (NGSIM) Vehicle Trajectories and Supporting Data | Department of Transportation - Data Portal 时间2005年到2006年间地…...
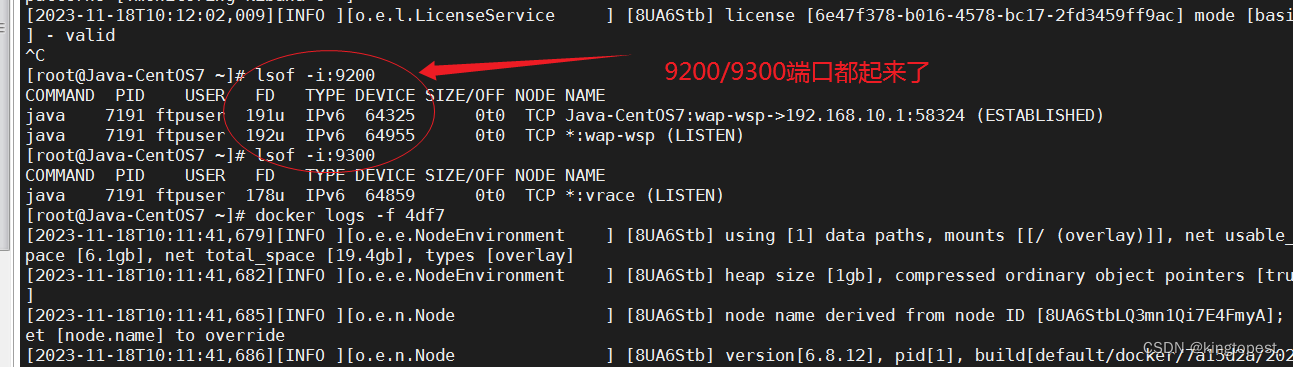
解决docker运行elastic服务端启动不成功
现象: 然后查看docker日志,发现有vm.max_map_count报错 ERROR: [1] bootstrap checks failed [1]: max virtual memory areas vm.max_map_count [65530] is too low, increase to at least [262144] 解决办法: 1. 宿主机(运行doc…...

mysql数据库中mysql database 数据被破坏产生的一系列问题
在执行sql脚本时,没有注意到sql脚本文件包含了对mysql 原始数据库的操作,执行了脚本。 脚本执行成功之后,登录或链接数据库查看数据时报错: The user specified as a definer (‘mysql.infoschema’‘localhost’) does not exis…...
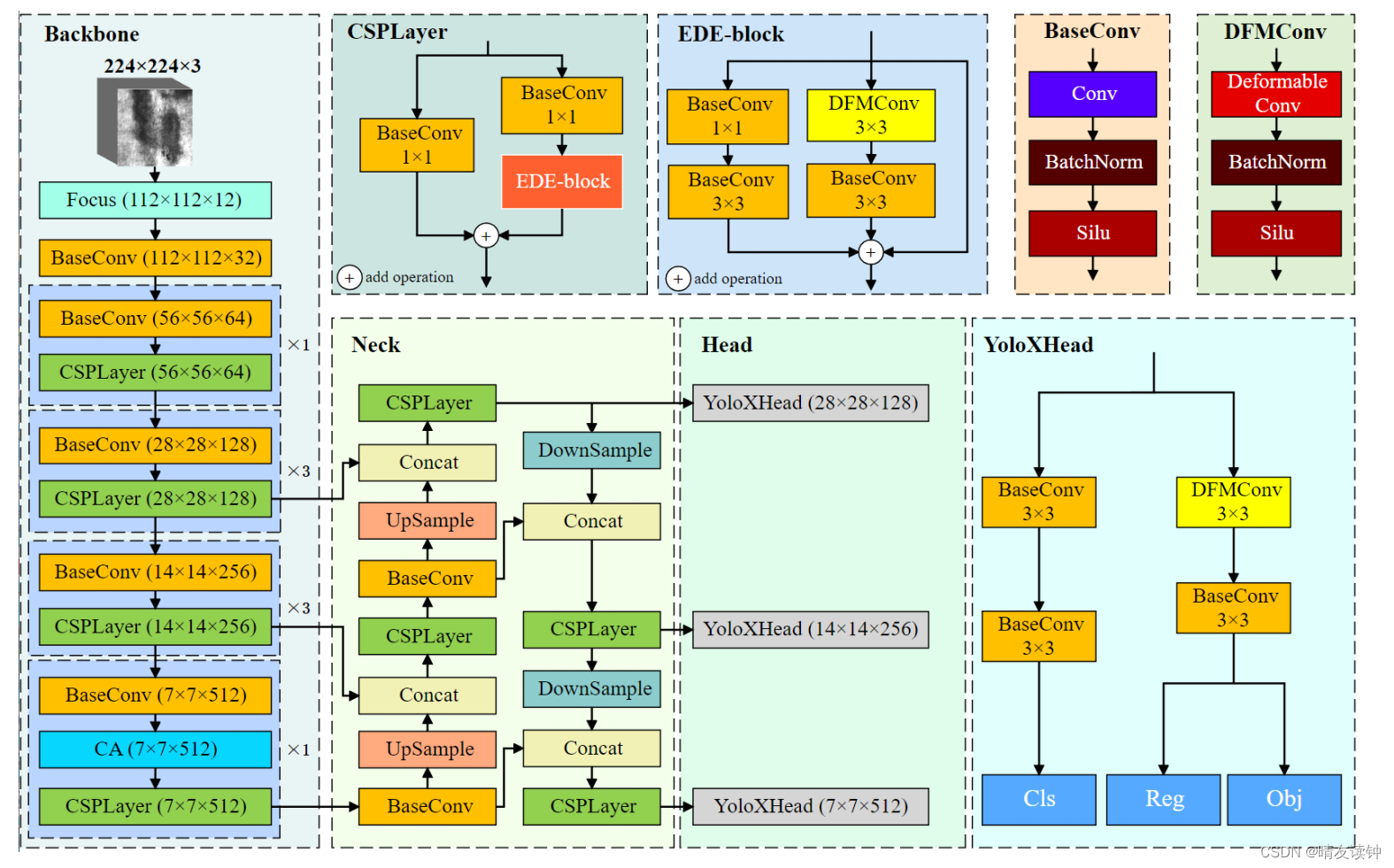
基于变形卷积和注意机制的带钢表面缺陷快速检测网络DCAM-Net(论文阅读笔记)
原论文链接->DCAM-Net: A Rapid Detection Network for Strip Steel Surface Defects Based on Deformable Convolution and Attention Mechanism | IEEE Journals & Magazine | IEEE Xplore DCAM-Net: A Rapid Detection Network for Strip Steel Surface Defects Base…...

05-Spring Boot工程中简化开发的方式Lombok和dev-tools
简化开发的方式Lombok和dev-tools Lombok常用注解 Lombok用标签方式代替构造器、getter/setter、toString()等重复代码, 在程序编译的时候自动生成这些代码 注解名功能NoArgsConstructor生成无参构造方法AllArgsConstructor生产含所有属性的有参构造方法,如果不希望含所有属…...

AIGC 技术在淘淘秀场景的探索与实践
本文介绍了AIGC相关领域的爆发式增长,并探讨了淘宝秀秀(AI买家秀)的设计思路和技术方案。文章涵盖了图像生成、仿真形象生成和换背景方案,以及模型流程串联等关键技术。 文章还介绍了淘淘秀的使用流程和遇到的问题及处理方法。最后,文章展望…...
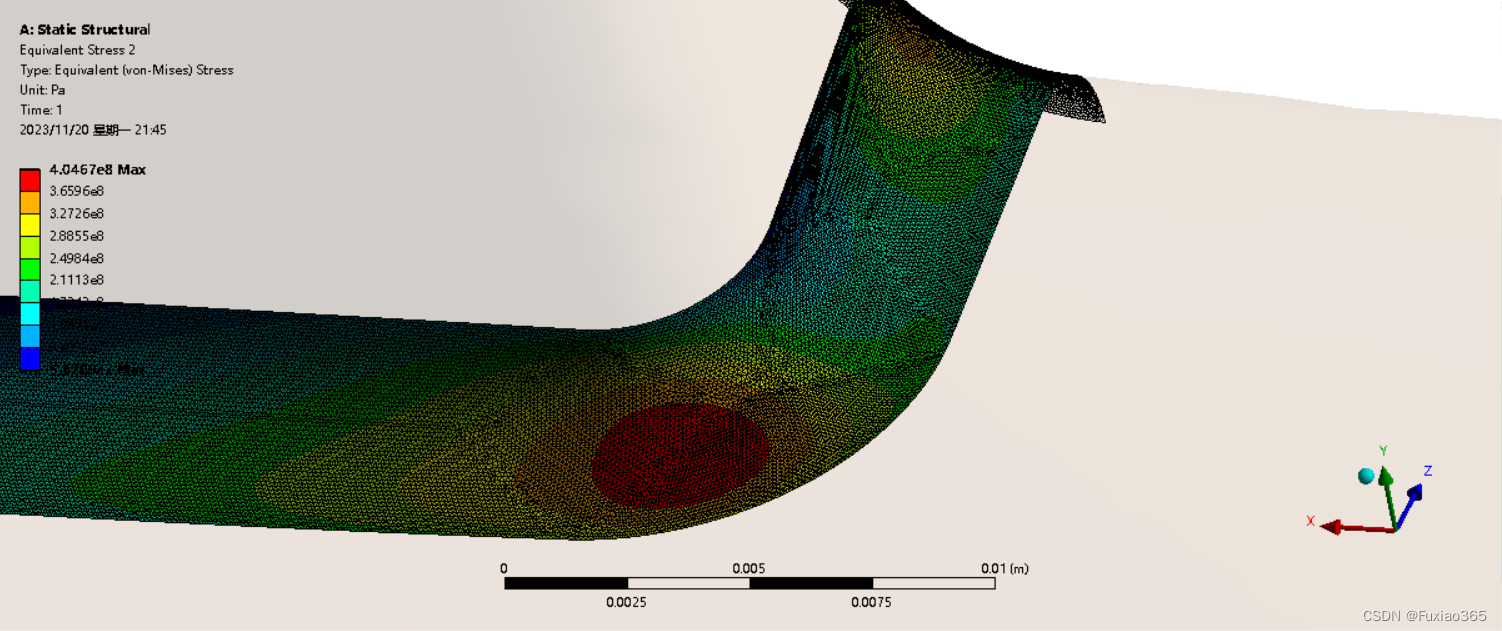
ANSYS网格无关性检查
网格精度对应力结果存在很大的影响,有时候可以发现,随着网格精度逐渐提高,所求得的最大应力值逐渐趋于收敛。 默认网格: 从默认网格下计算出的应力云图可以发现,出现了的三处应力奇异点,此时算出的应力值是…...
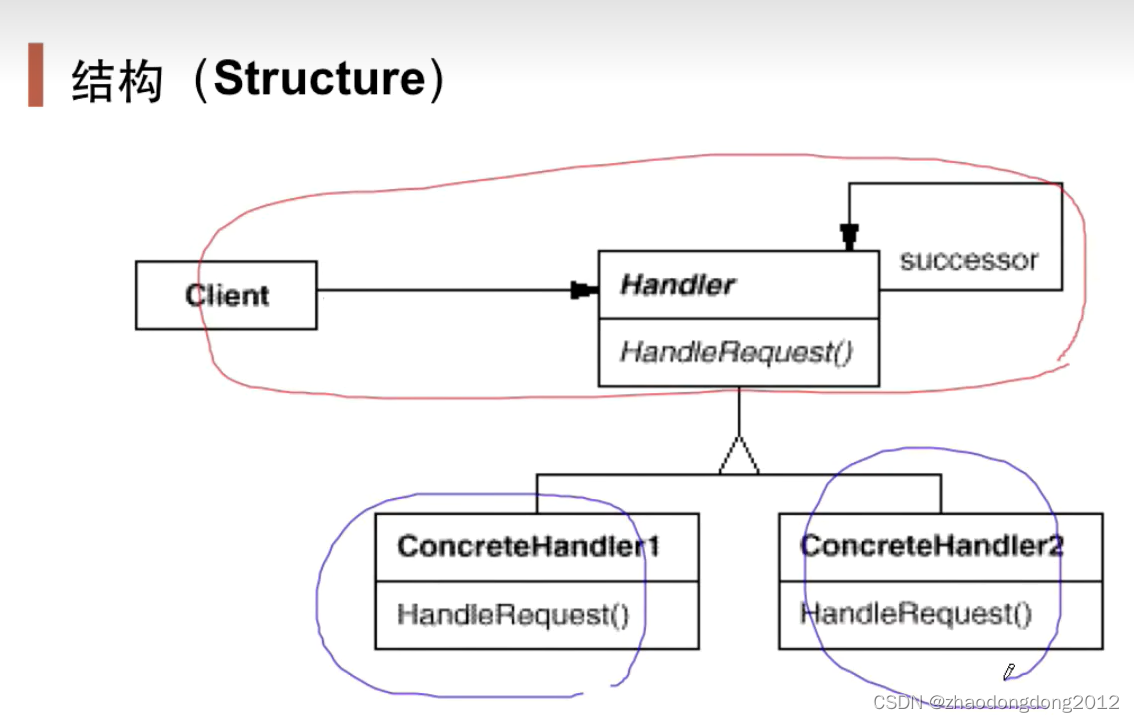
设计模式-责任链-笔记
动机(Motivation) 在软件构建过程中,一个请求可能被多个对象处理,但是每个请求在运行时只能有个接受者,如果显示指定,将必不可少地带来请求者与接受者的紧耦合。 如何使请求的发送者不需要指定具体的接受…...

SpringMvc请求原理流程
springmvc是用户和服务沟通的桥梁,官网提供了springmvc的全面使用和解释:DispatcherServlet :: Spring Framework 流程 1.Tomcat启动 2.解析web.xml文件,根据servlet-class找到DispatcherServlet,根据init-param来获取spring的…...

【开源】基于Vue.js的音乐偏好度推荐系统的设计和实现
项目编号: S 012 ,文末获取源码。 \color{red}{项目编号:S012,文末获取源码。} 项目编号:S012,文末获取源码。 目录 一、摘要1.1 项目介绍1.2 项目录屏 二、系统设计2.1 功能模块设计2.1.1 音乐档案模块2.1…...
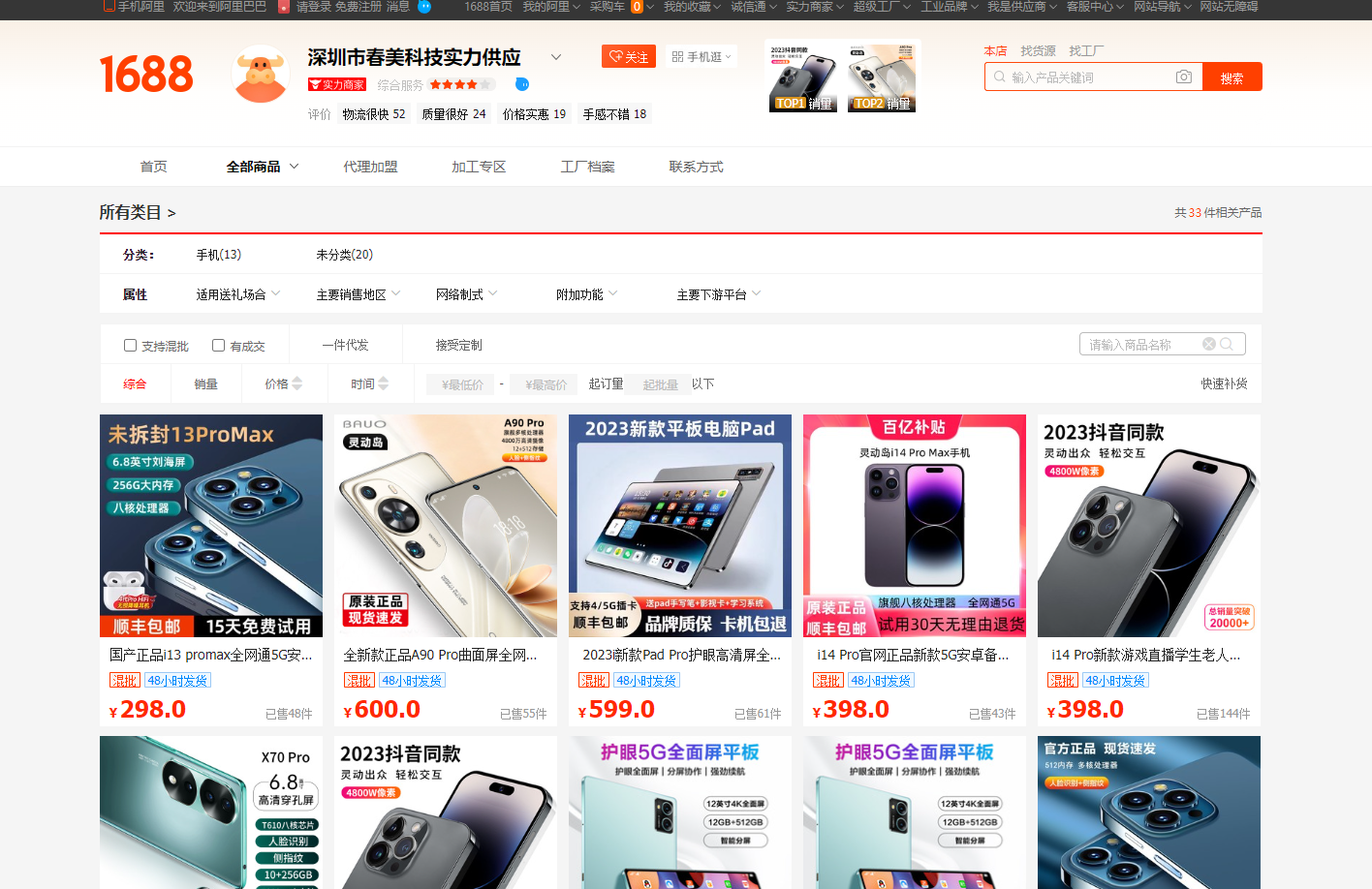
采集1688整店商品(店铺所有商品、店铺列表api)
返回数据: 请求链接 {"user": [],"items": {"item": [{"num_iid": "738354436678","title": "国产正品i13 promax全网通5G安卓智能手机源头厂家批发手机","pic_url": "http…...
IObit Unlocker丨解除占用程序软件
更多内容请收藏:https://rwx.tza-3.xyz 官网:IObit Unlocker “永远不用担心电脑上无法删除的文件。” 界面简单,支持简体中文,一看就会,只需要把无法删除/移动的文件或整个U盘拖到框里就行。 解锁率很高,…...

开发一款小程序游戏需要多少钱?
小程序游戏的开发成本因多种因素而异,无法提供具体的固定数字。以下是影响小程序游戏开发成本的一些关键因素: 游戏规模和复杂度: 小程序游戏可以是简单的休闲游戏,也可以是更复杂的策略游戏。规模和复杂度会影响开发所需的时间和…...

基于Vue+SpringBoot的校园电商物流云平台开源项目
项目编号: S 034 ,文末获取源码。 \color{red}{项目编号:S034,文末获取源码。} 项目编号:S034,文末获取源码。 目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 数据中心模块2.2 商品数据模块2.3 快…...

庖丁解牛:NIO核心概念与机制详解 03 _ 缓冲区分配、包装和分片
文章目录 Pre概述缓冲区分配和包装 (allocate 、 wrap)缓冲区分片 (slice)缓冲区份片和数据共享只读缓冲区 (asReadOnlyBuffer)直接和间接缓冲区 (allocateDirect)内存映射文件 I/O将文件映射到内存(map) Pre 庖丁解牛࿱…...
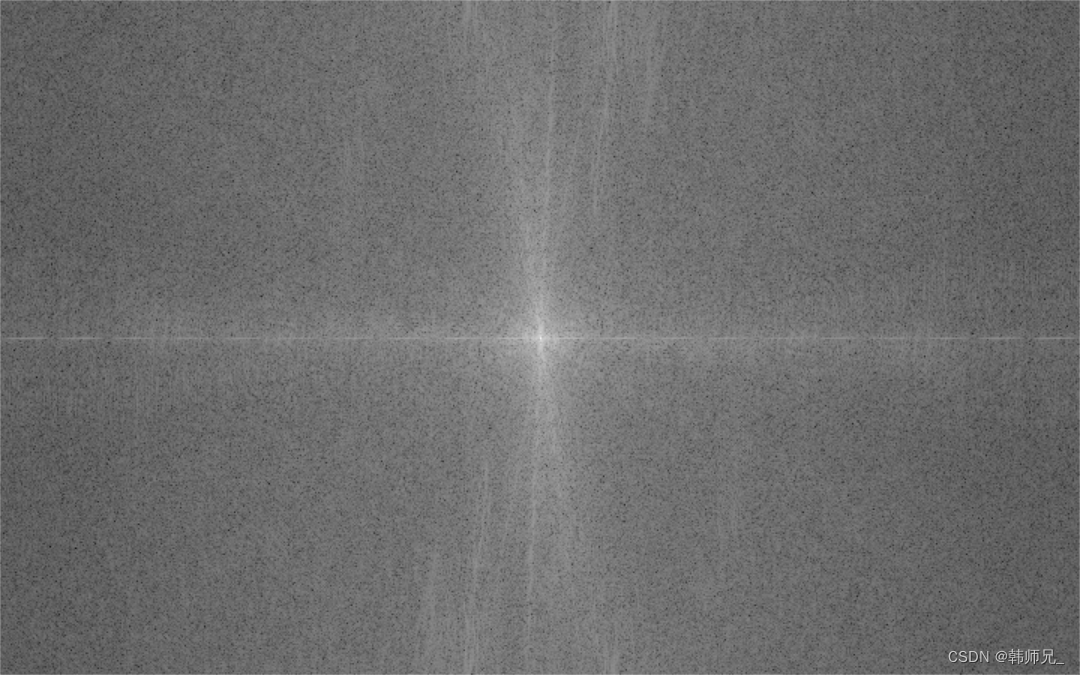
002 OpenCV dft 傅里叶变换
目录 一、傅里叶变换 1.1 傅里叶变换概念 1.2 opencv中傅里叶变换 二、实验代码 一、环境 本文使用环境为: Windows10Python 3.9.17opencv-python 4.8.0.74 二、傅里叶变换 2.1 傅里叶变换概念 傅里叶变换(Fourier Transform)是一种…...
)
力扣:171. Excel 表列序号(Python3)
题目: 给你一个字符串 columnTitle ,表示 Excel 表格中的列名称。返回 该列名称对应的列序号 。 例如: A -> 1 B -> 2 C -> 3 ... Z -> 26 AA -> 27 AB -> 28 ... 来源:力扣(LeetCode) …...

C++中结构体的初始化
C中结构体的初始化 结构体是一个由程序员定义的数据类型,可以容纳许多不同的数据值。在过去,面向对象编程的应用尚未普及之前,程序员通常使用这些从逻辑上连接在一起的数据组合到一个单元中。一旦结构体类型被声明并且其数据成员被标识&…...

vue3+vite+ts 发布自定义组件到npm
vue3vite 发布自定义组件到npm 初始化项目编写组件配置打包组件上传到npm测试组件库 初始化项目 // 创建项目 pnpm create vite vue-test-app --template vue-ts// 运行项目 cd vite vue-test-app pnpm install pnpm run dev编写组件 1、根目录下创建packages目录作为组件的开…...

mybatis使用xml形式配置
以这个注解形式的查询代码为例 Select("select * from emp where name like concat(%,#{name},%) and gender #{gender} and entrydate between #{begin} and #{end} order by update_time desc ")public List<Emp> list(String name, Short gender, LocalDat…...

千问3.5-2B实战案例:直播截图实时分析→商品链接提取→竞品价格对比→话术生成
千问3.5-2B实战案例:直播截图实时分析→商品链接提取→竞品价格对比→话术生成 1. 项目背景与价值 在电商直播场景中,运营团队面临三个核心痛点: 直播过程中无法实时监测竞品价格动态人工记录商品信息效率低下且容易出错话术调整滞后于市场…...

XUnity.AutoTranslator:Unity游戏实时翻译插件终极指南
XUnity.AutoTranslator:Unity游戏实时翻译插件终极指南 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 还在为看不懂外语游戏而烦恼吗?🎮 语言障碍让多少精彩游戏体验大…...

从零部署到实战标注:SUSTechPOINTS 3D点云标注平台全流程指南
1. 为什么选择SUSTechPOINTS进行3D点云标注 在自动驾驶研发过程中,3D点云标注是个绕不开的苦差事。我最早用过不少商业标注工具,不是价格贵得离谱,就是功能残缺不全。直到去年团队接手一个校企合作项目,才发现南方科技大学开源的这…...

SAP移动类型全解析:从收货到移库,一文搞懂库存管理核心配置
SAP移动类型实战指南:解锁库存管理的核心密码 当你第一次在SAP系统中执行货物移动时,面对上百种移动类型代码,是否感到无从下手?作为全球500强企业广泛采用的ERP系统,SAP的库存管理模块以其严谨性和灵活性著称…...

Java八股文面试题,堪称2026最强!!!
1、什么是 java 序列化,如何实现 java 序列化 难度系数:⭐ 序列化是一种用来处理对象流的机制,所谓对象流也就是将对象的内容进行流化。可以对流化后的对象进行读写操作,也可将流化后的对象传输于网络之间。序列化是为了解决在…...

Phi-4-mini-reasoning效果展示:同参数量级中推理准确率超Llama3-8B实测对比
Phi-4-mini-reasoning效果展示:同参数量级中推理准确率超Llama3-8B实测对比 1. 开篇亮点:小模型的大智慧 Phi-4-mini-reasoning这款仅有3.8B参数的轻量级开源模型,正在重新定义我们对小模型能力的认知。作为专为数学推理、逻辑推导和多步解…...

错位排序算法
首先,让我们理解什么是错位排列:错位排列是指在排列中,任何一个元素都不在自己原来的位置上。比如,对于序列 {1,2,3}{1,2,3},一个错位排列可能是 {3,1,2}{3,1,2},因为 11 不在位置 11 上,22 不在…...

ClawdBot代码实例:修改clawdbot.json实现模型热切换实操
ClawdBot代码实例:修改clawdbot.json实现模型热切换实操 1. 引言:你的个人AI助手,想换模型就换模型 想象一下,你有一个24小时在线的AI助手,它能帮你写代码、回答问题、整理文档。但用久了,你可能会想&…...
快速重建你的3D场景(附Ubuntu 22.04+PyTorch 2.0配置))
告别漫长等待:用EDGS(3DGS优化版)快速重建你的3D场景(附Ubuntu 22.04+PyTorch 2.0配置)
极速三维重建实战:EDGS技术解析与Ubuntu高效配置指南 当传统3D高斯喷溅技术(3DGS)还在以小时为单位计算训练时间时,EDGS已经将这一过程压缩到令人惊讶的分钟级。这就像从绿皮火车换乘复兴号高铁的体验升级——不仅速度更快&#x…...

UV固化三防漆好用吗?光固化速度与设备要求
UV固化三防漆好用吗?光固化速度与设备要求高效快速的固化优势 UV固化三防漆(也称紫外光固化保形涂层)是一种专为印刷电路板(PCB)设计的保护材料,通过紫外光照射触发光引发剂瞬间聚合,实现快速固…...