手撕A*算法(详解A*算法)
A*算法原理
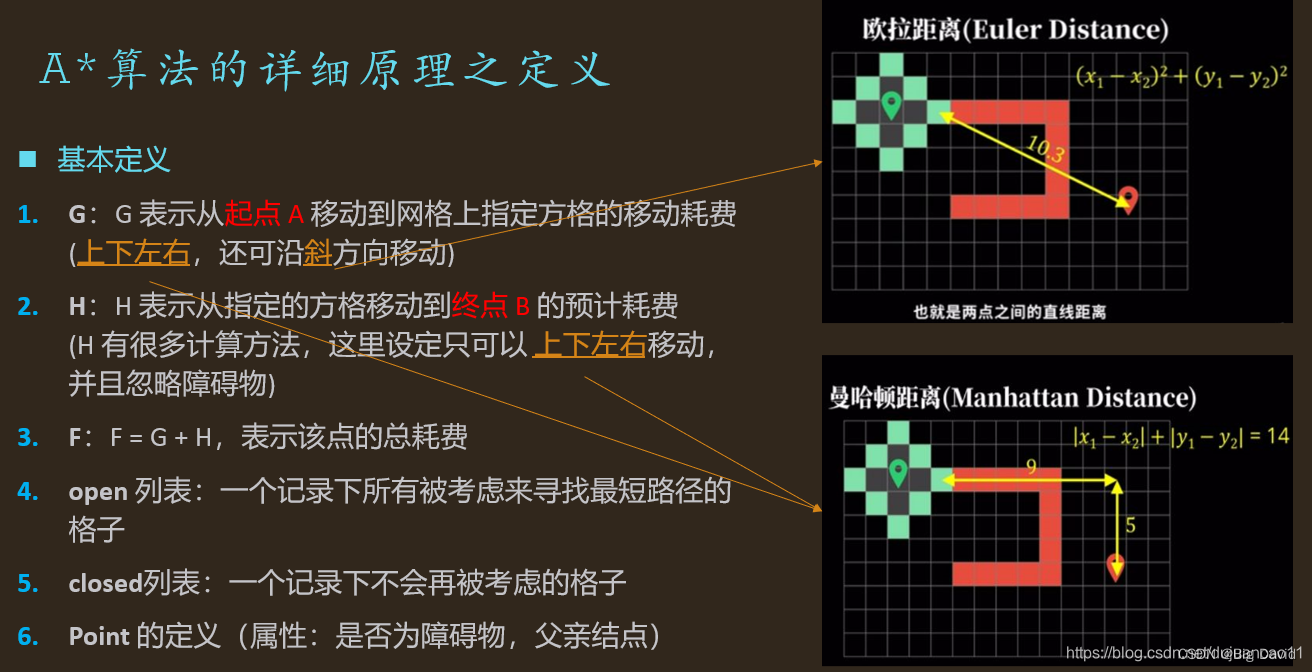
全局路径规划算法,根据给定的起点和终点在全局地图上进行总体路径规划。
导航中使用A*算法计算出机器人到目标位置的最优路线,一般作为规划的参考路线
// 定义地图上的点
struct Point
{int x,y; // 栅格行列Point(int x, int y):x(x),y(y){}; // 参数列表初始化double distance(Point& p) // 求距离{return sqrt((x-p.x)*(x-p.x)+(y-p.y)*(y-p.y)); // 欧几里得距离}
};
// 定义节点
struct Node
{Point point; // 栅格点double g,h,f;// 代价值,f总价值,g到起点的代价值,h到终点的估计代价(启发式函数)Node *parent;// 父节点指针Node(Point point, double g, double h, Node* parent = nullptr):point(point), g(g), h(h), f(g+h), parent(parent){}
};

// 定义地图vector<vector<int>> gridmap = {{0, 1, 0, 0, 0},{0, 0, 1, 0, 0},{0, 0, 1, 1, 0},{0, 0, 1, 0, 0},{0, 0, 1, 1, 0}};// 定义起点和终点Point start{0, 0};Point goal{4, 4};
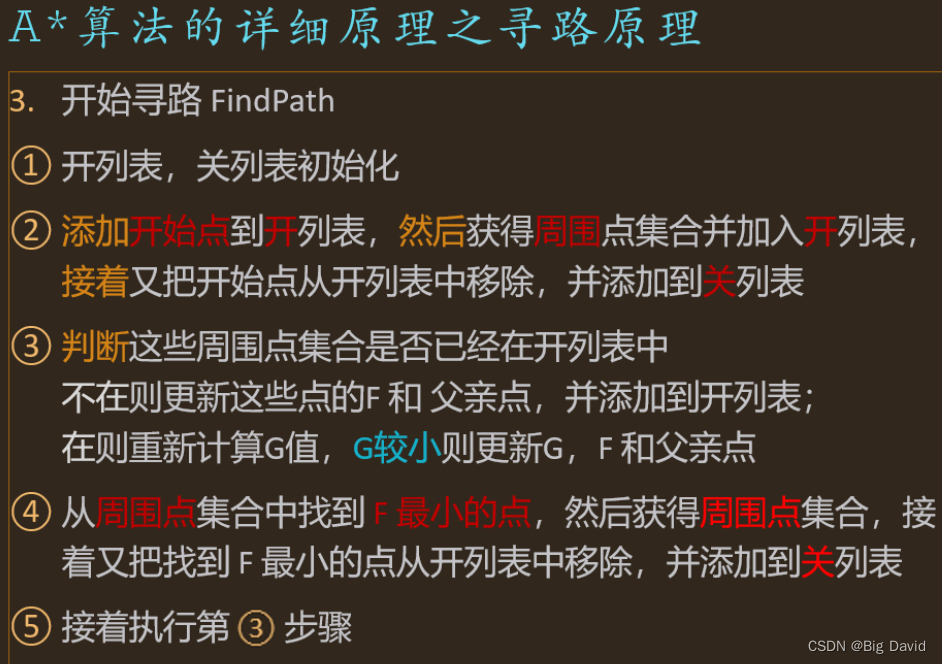
A*算法的寻路原理
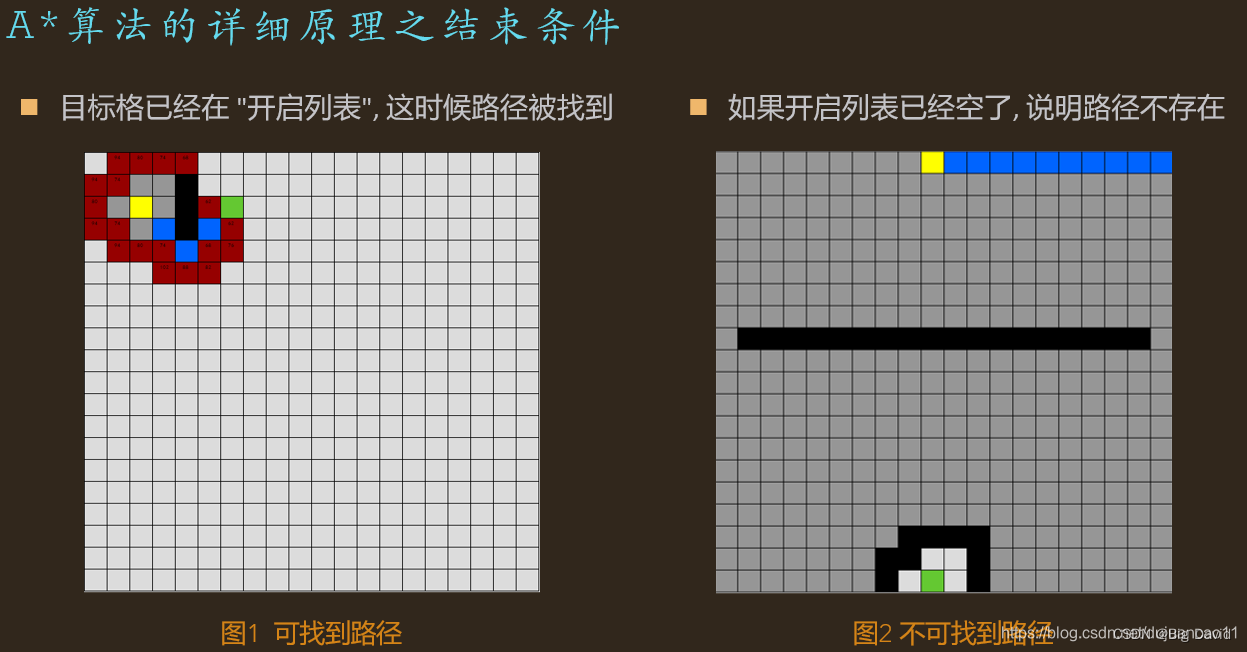
A的结束条件
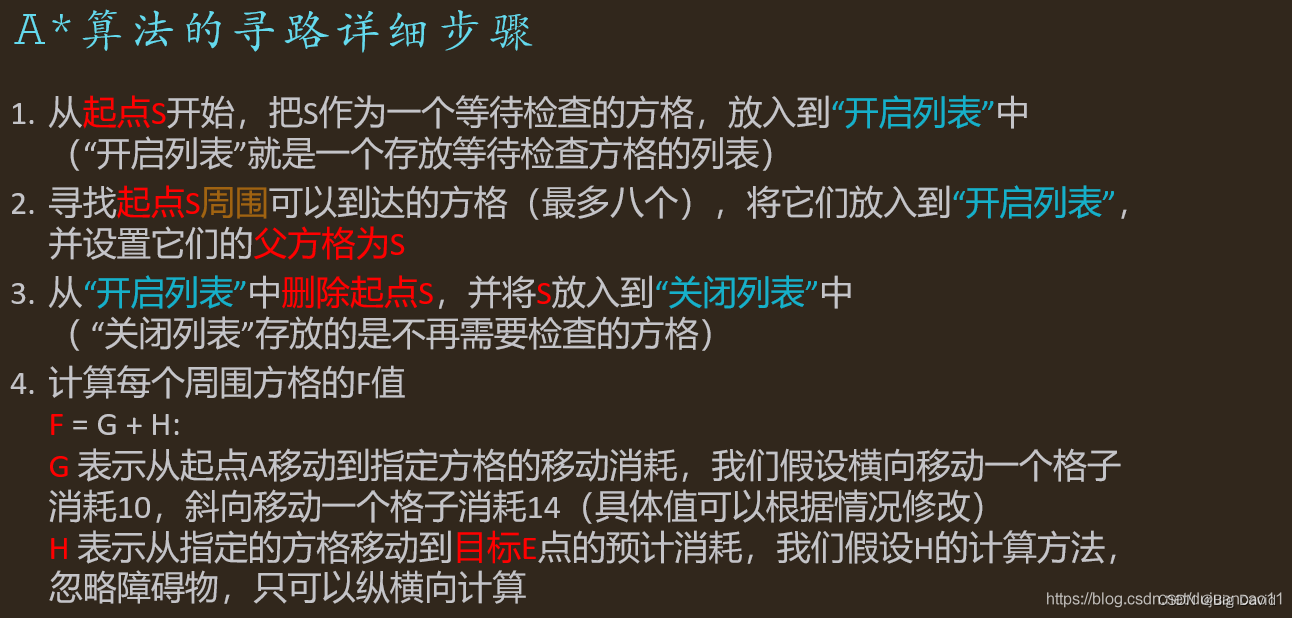
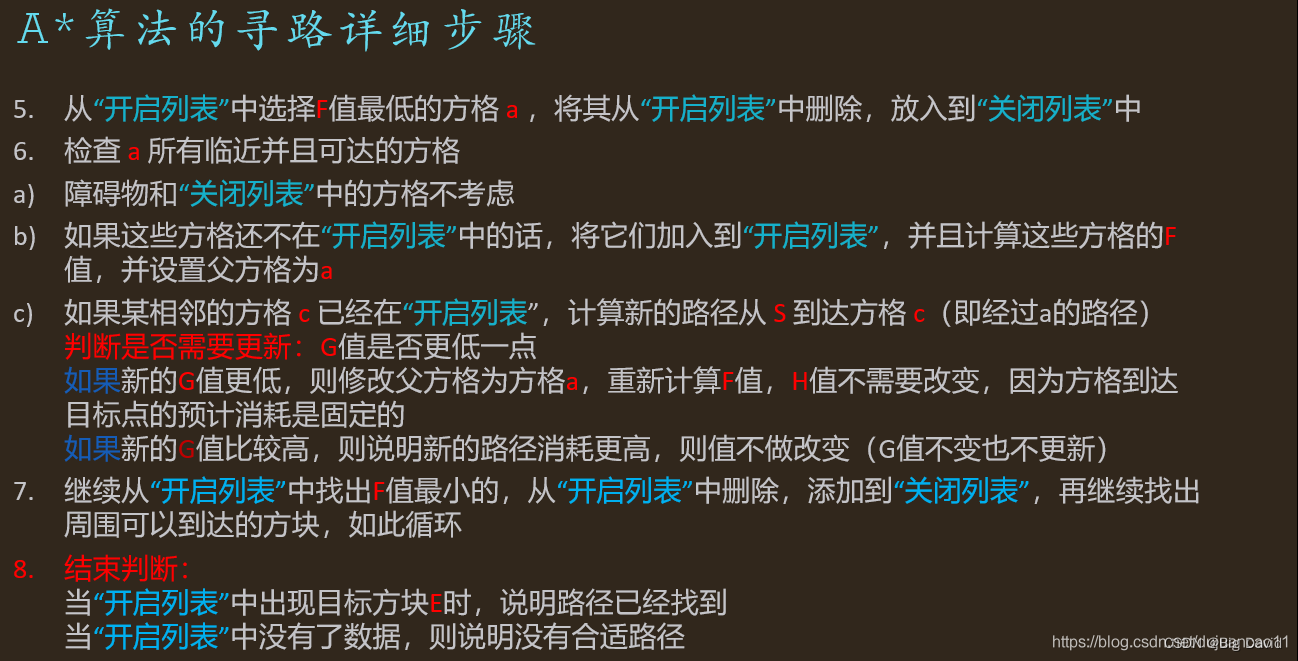
A算法的寻路详细步骤
手撕A*代码
#include <iostream>
#include <vector>
#include <algorithm>
#include <cmath>
using namespace std;
// 定义地图上的点
struct Point
{int x,y; // 栅格行列Point(int x, int y):x(x),y(y){}; // 参数列表初始化double distance(Point& p) // 求距离{return sqrt((x-p.x)*(x-p.x)+(y-p.y)*(y-p.y)); // 欧几里得距离}
};// 定义节点
struct Node
{Point point; // 栅格点double g,h,f;// 代价值,f总价值,g到起点的代价值,h到终点的估计代价(启发式函数)Node *parent;// 父节点指针Node(Point point, double g, double h, Node* parent = nullptr):point(point), g(g), h(h), f(g+h), parent(parent){}
};// 自定义Node*排序规则
struct NodeCompare{bool operator()(Node* n1, Node* n2){return (n1->f) < (n2->f); // 表示升序排列}
};
// 基于栅格地图的路径规划A*算法,返回由Point组成的路径path,输入为地图,起点和终点
vector<Point> AstarPathPlanning(vector<vector<int>> &gridmap, Point& start, Point& goal)
{// 获取地图参数int row = gridmap.size(); // 行,表示地图的宽度int col = gridmap[0].size(); // 列,表示地图的长// 定义openlist, closelistvector<Node *> openlist; // openlist 表示待搜索的节点vector<Node *> closelist;// closelist表示已搜索的节点openlist.push_back(new Node(start, start.distance(start), start.distance(goal))); // 将起点加入openlist中,作为初始化int count1 = 1;// 进入循环,开始搜索,搜索到终点则返回路径vector<Point> path;while (!openlist.empty()) // 当openlist为空,表示所有可搜索节点已经被搜索,此时循环结束{// 获取当前搜索节点current,即openlist中f最小节点sort(openlist.begin(), openlist.end(), NodeCompare{}); // 先对openlist排序,这里自定义排序规则(从小到大)Node* current = *openlist.begin(); // *openlist.begin()排序后即为f最小的迭代器位置// 将current对应的元素从openlist中删除openlist.erase(openlist.begin());// 将current加入到closelist中closelist.push_back(current);// 对当前搜索节点current进行分类讨论// 1-current是终点,则返回路径,表示找到路径if (current->point.x == goal.x && current->point.y == goal.y){while (current != nullptr) // 利用父节点,从终点向起点回溯最短路径,因为起点没有父节点,所以起点current父节点为nullptr{path.push_back(current->point);current = current->parent;}reverse(path.begin(), path.end()); // 路径是反的,翻转路径int count2 = 0; // delete 次数for (auto o : openlist){delete o;count2++;}for (auto c : closelist){delete c;count2++;}cout << "new times: " << count1 << endl;cout << "delete times: " << count2 << endl;return path;}// 2-current 不是终点,需要讨论其邻近的节点neighborsint x = current->point.x;int y = current->point.y;vector<Point> neighbors = { // 8个邻近节点的坐标{x-1,y-1}, {x-1,y}, {x-1,y+1},{x,y-1}, {x,y+1},{x+1,y-1}, {x+1,y}, {x+1,y+1}};// 遍历所有的临近节点,每一个邻近节点n必须满足在地图范围内同时不是障碍物for (auto n : neighbors){if ((n.x >= 0 && n.x < row) && (n.y >= 0 && n.y < col) && gridmap[n.x][n.y]==0){// 1 n在closelist中,表示已经搜索过了,此时直接跳过bool incloselist = false;for (auto c : closelist){if (c->point.x == n.x && c->point.y == y){incloselist = true;break;}}if (incloselist){continue;}// 2 n是否在openlist中进行讨论bool inopenlist = false;for (auto o : openlist){if (o->point.x == n.x && o->point.y == n.y){inopenlist = true;// n 在openlist中,对比f值,更新代价值和父节点parentdouble g = current->g + n.distance(current->point); // 临近节点n到起点的距离 = 当前搜索节点current到起点的距离 + 当前搜索节点current到邻近节点n距离double h = n.distance(goal); // 临近节点n到终点的估计距离代价double f = g + h;if (f < (o->f)){o->f = f;o->parent = current;}break;}}if (!inopenlist) // n不在openlist中,对比f值,计算代价值,添加到openlist中,下次备选{double g = current->g + n.distance(current->point); // 临近节点n到起点的距离 = 当前搜索节点current到起点的距离 + 当前搜索节点current到邻近节点n距离double h = n.distance(goal); // 临近节点n到终点的估计距离代价double f = g + h;openlist.push_back(new Node(n,g,h,current));count1++;}}}}// 搜索完成没有路径,表示路径规划失败,此时返回空路径return path;
}
int main()
{// 定义地图vector<vector<int>> gridmap = {{0, 1, 0, 0, 0},{0, 0, 1, 0, 0},{0, 0, 1, 1, 0},{0, 0, 1, 0, 0},{0, 0, 1, 1, 0}};// 定义起点和终点Point start{0, 0};Point goal{4, 4};vector<Point> path = AstarPathPlanning(gridmap, start, goal);cout << path.size() << endl;for (auto p : path){if (p.x == goal.x && p.y == goal.y){cout << "(" << p.x << ',' << p.y << ")" << endl;}else{cout << "(" << p.x << ',' << p.y << ")" << "->";}}return 0;
}
A*算法总结
把起点加入 open list 。
重复如下过程:
a. 遍历 open list ,查找 F 值最小的节点,把它作为当前要处理的节点。
b. 把这个节点移到 close list 。
c. 对当前方格的 8 个相邻方格的每一个方格?
◆ 如果它是不可抵达的或者它在 close list 中,忽略它。否则,做如下操作。
◆ 如果它不在 open list 中,把它加入 open list ,并且把当前方格设置为它的父亲,记录该方格的 F , G 和 H 值。
◆ 如果它已经在 open list 中,检查这条路径 ( 即经由当前方格到达它那里 ) 是否更好,用 G 值作参考。更小的 G 值表示这是更好的路径。如果是这样,把它的父亲设置为当前方格,并重新计算它的 G 和 F 值。如果你的 open list 是按 F 值排序的话,改变后你可能需要重新排序。
d. 停止,当你
◆ 把终点加入到了 open list 中,此时路径已经找到了,或者
◆ 查找终点失败,并且 open list 是空的,此时没有路径。
3.保存路径。从终点开始,每个方格沿着父节点移动直至起点,这就是你的路径。
相关文章:
手撕A*算法(详解A*算法)
A*算法原理 全局路径规划算法,根据给定的起点和终点在全局地图上进行总体路径规划。 导航中使用A*算法计算出机器人到目标位置的最优路线,一般作为规划的参考路线 // 定义地图上的点 struct Point {int x,y; // 栅格行列Point(int x, int y):x(x),y(y){…...
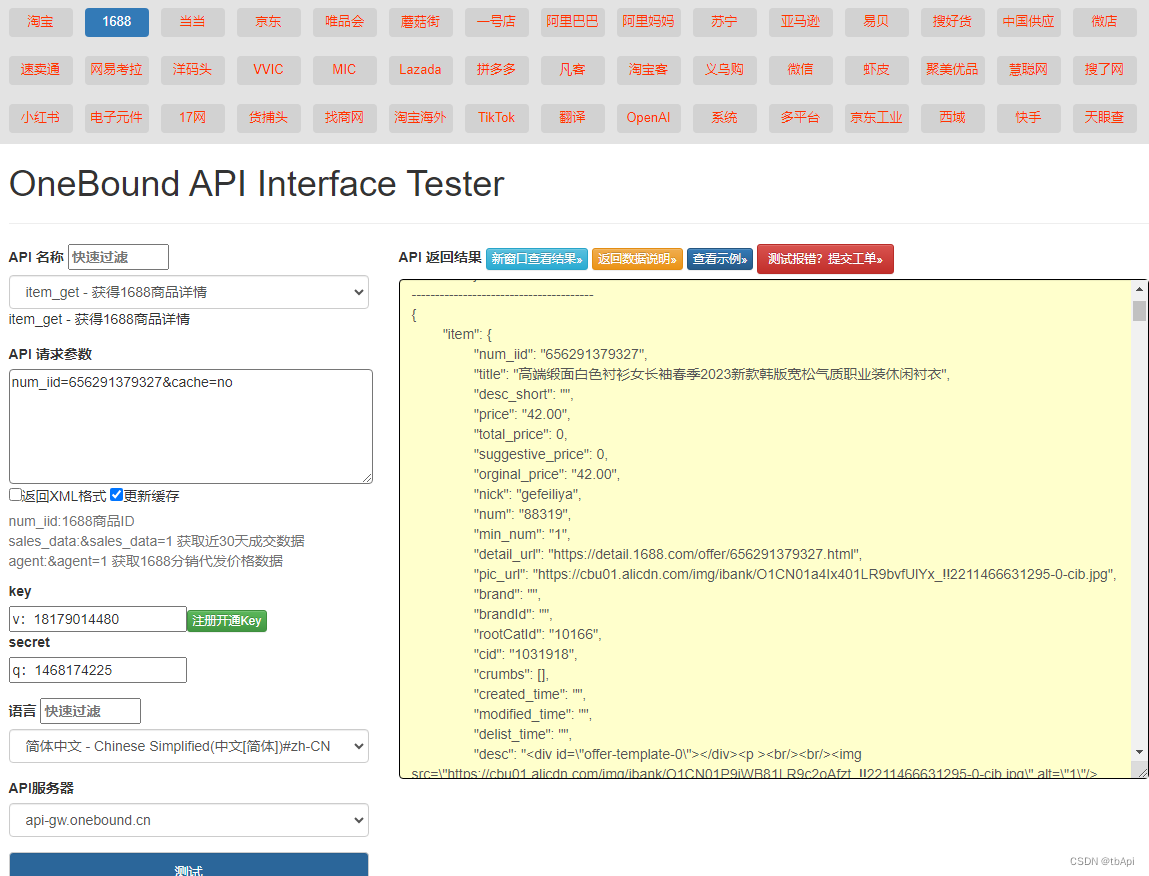
1688API如何获取商品详情信息(关键词搜索商品列表),1688API接口开发系列
1688商品详情接口是指1688平台提供的API接口,用于获取商品详情信息。通过该接口,您可以获取到商品的详细信息,包括商品标题、价格、库存、描述、图片等。 要使用1688商品详情接口,您需要先申请1688的API权限,并获取ac…...
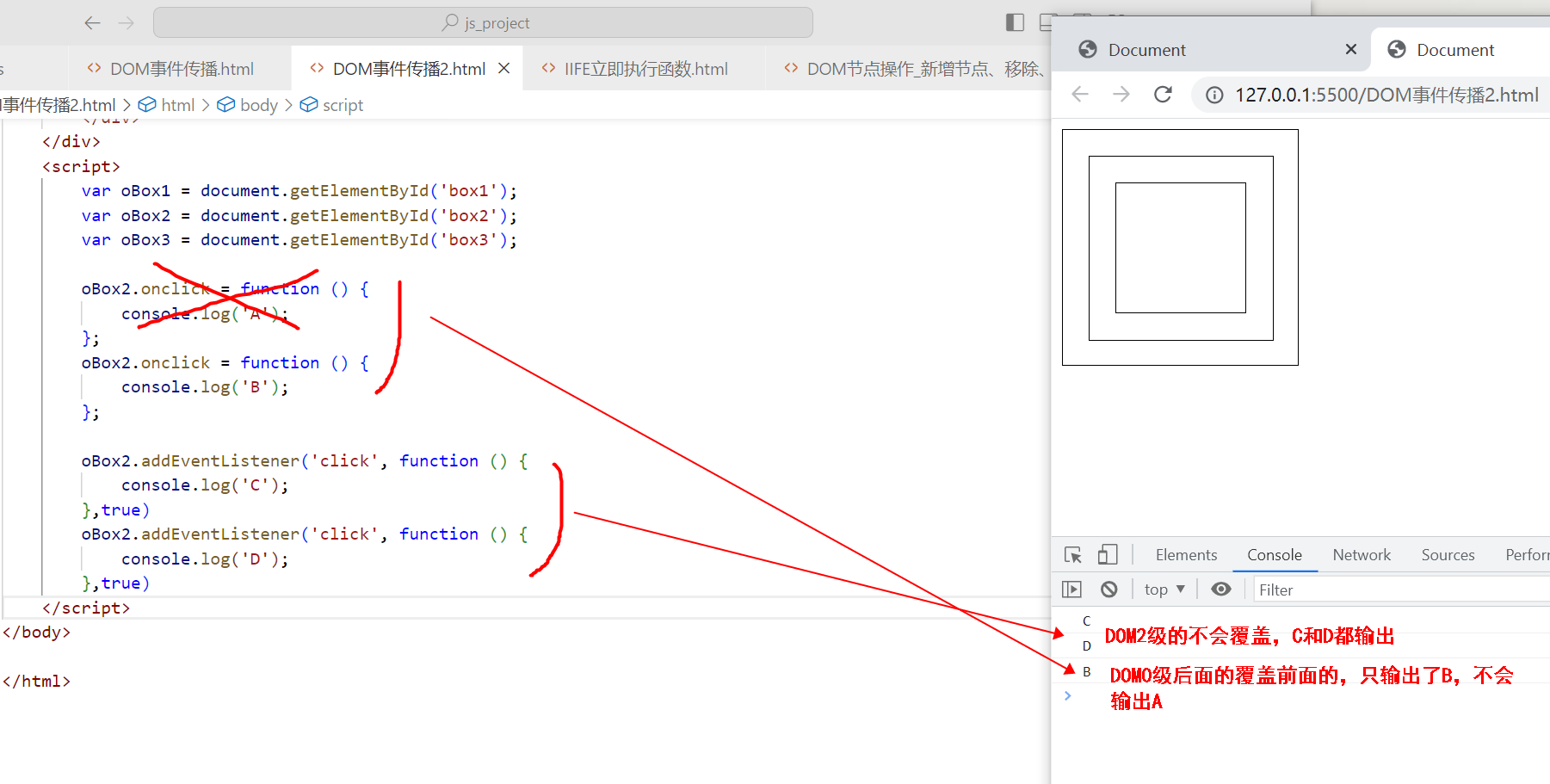
〖大前端 - 基础入门三大核心之JS篇㊶〗- DOM事件传播和事件监听方法addEventListener()
说明:该文属于 大前端全栈架构白宝书专栏,目前阶段免费,如需要项目实战或者是体系化资源,文末名片加V!作者:不渴望力量的哈士奇(哈哥),十余年工作经验, 从事过全栈研发、产品经理等工作…...

Cartographer实现双雷达建图
Urdf修改 <?xml version="1.0" ?> <robot name="robot"><link name="base_link" /><link name="laser_1" /><link name="laser_2" /><link name="laser_link" /><join…...

(离散数学)主析取范式
...

Communications link failure
The last packet sent successfully to the server was 0 milliseconds ago. The driver has not received any packets from the server. Connect timed out. 在本地IDEA中和DBeaver中连接阿里云上MySQL数据库,报以上错误。 在本地可以ping通阿里云公网地址&am…...
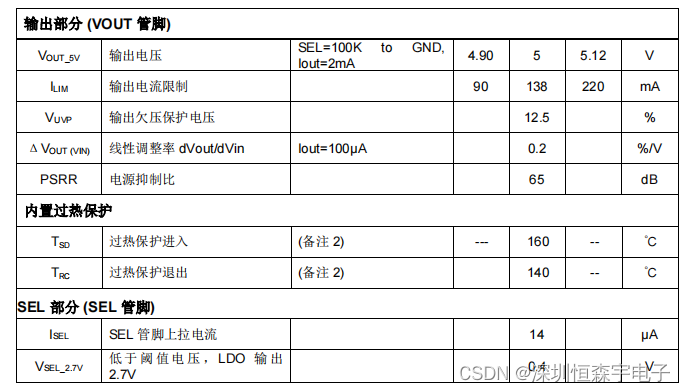
XC3320 离线式、无电感交流输入线性稳压器 可替代KP3310 固定5V输出电压
XC3320 是一款紧凑型无电感设计的离线式线性稳压器。XC3320 可获得 5V输出电压。XC3320 是一种简单可靠的获得偏置供电的离线式电源解决方案。XC3320 集成了 650V 功率 MOSFET,启动控制电路,VDD 电压控制电路,AC 交流信号同步检测电路,低压差稳压器等。该…...

导购APP、淘客查券机器人与淘客系统:全面对比与选择
导购APP、淘客机器人与淘客系统:全面对比与选择 在互联网购物的时代,导购APP、淘客机器人和微赚淘客系统成为了消费者们的三大重要工具。它们各具优势,但也存在一些问题。本文将为您详细对比这三种工具,帮助您在购物时做出最合适…...
飞翔的鸟游戏
一.准备工作 首先创建一个新的Java项目命名为“飞翔的鸟”,并在src中创建一个包命名为“com.qiku.bird",在这个包内分别创建4个类命名为“Bird”、“BirdGame”、“Column”、“Ground”,并向需要的图片素材导入到包内。 二.代码呈现 pa…...
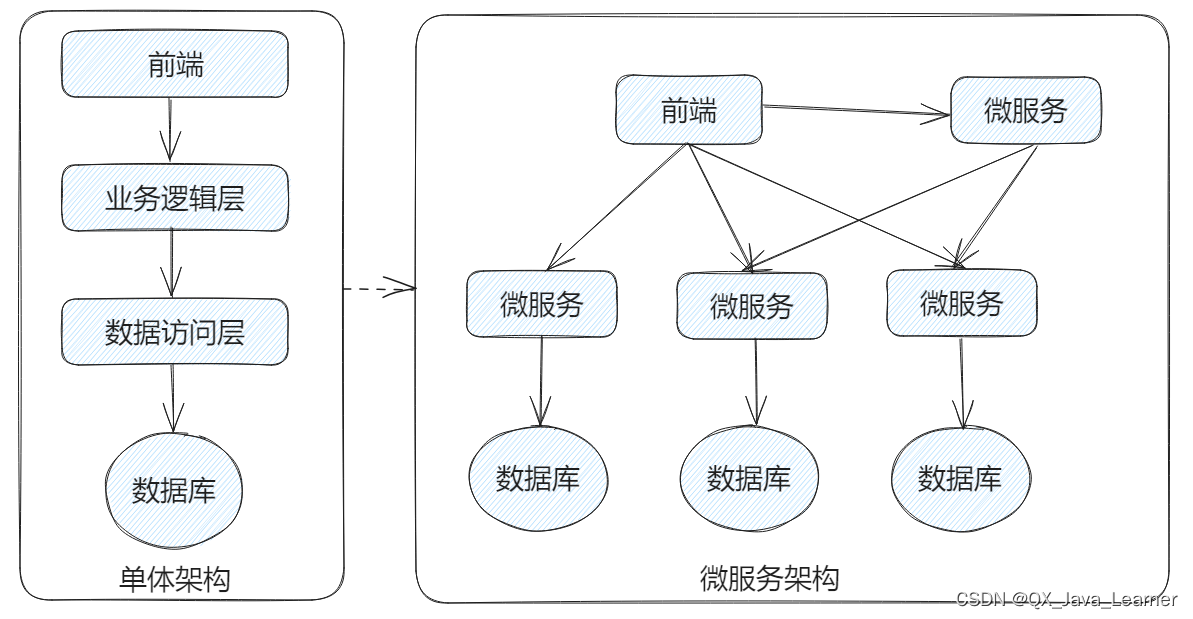
【SpringCloud】为什么选择微服务?
一般的平台会遇到的问题: 服务配置复杂。基础服务多,服务的资源配置复杂,传统方式管理服务复杂 服务之间调用复杂。检索服务、用户中心服务等,服务之间的调用复杂,依赖多 服务监控难度大。服务比较多,…...
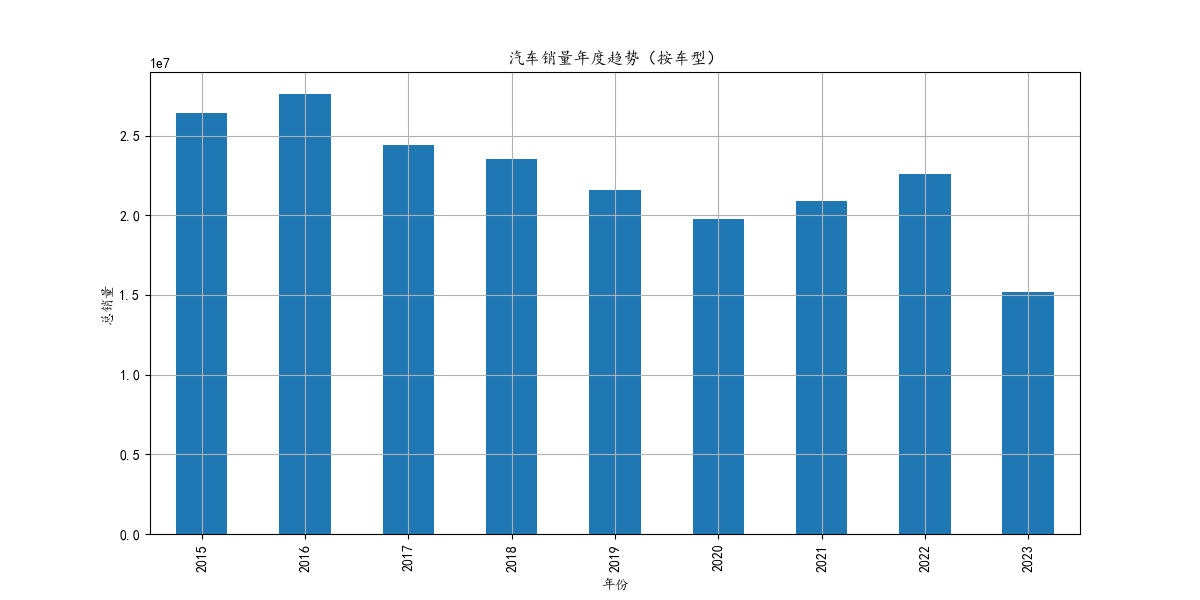
基于Python实现汽车销售数据可视化+预测【500010086.1】
导入模块 import numpy as np import pandas as pd from pylab import mpl import plotly.express as px import matplotlib.pyplot as plt import seaborn as sns设置全局字体 plt.rcParams[font.sans-serif][kaiti]获取数据 total_sales_df pd.read_excel(r"./data/中…...
干货分享:好用的两款封面制作工具
无论你是图文博主还是视频博主,做封面都是必不可少的。关于做封面的产品,我推荐两个:如果你使用手机,我推荐使用醒图;如果你使用电脑,我则推荐稿定设计。 01 醒图 为什么醒图如此出色呢? 首先…...

模版模式 设计模式
设计模式 总目录 https://preparedata.blog.csdn.net/article/details/134512591 文章目录 设计模式 总目录一、案例二、抽象类模版 AbstractOrderTemplate(顶层的订单抽象类)三、执行模版的实现类3.1 默认执行模版 DefaultOrder3.2 其他执行模版 Simlp…...

MySQL锁机制
前置 锁理论 锁总结 锁实践 记录锁 间隙锁 临键锁 对数据库的操作有读、写,组合起来就有 读读、读写、写读、写写,读读不存在安全问题,安全问题加锁都可以解决,但所有的操作都加锁太重了,只有写写必须要求加锁&…...
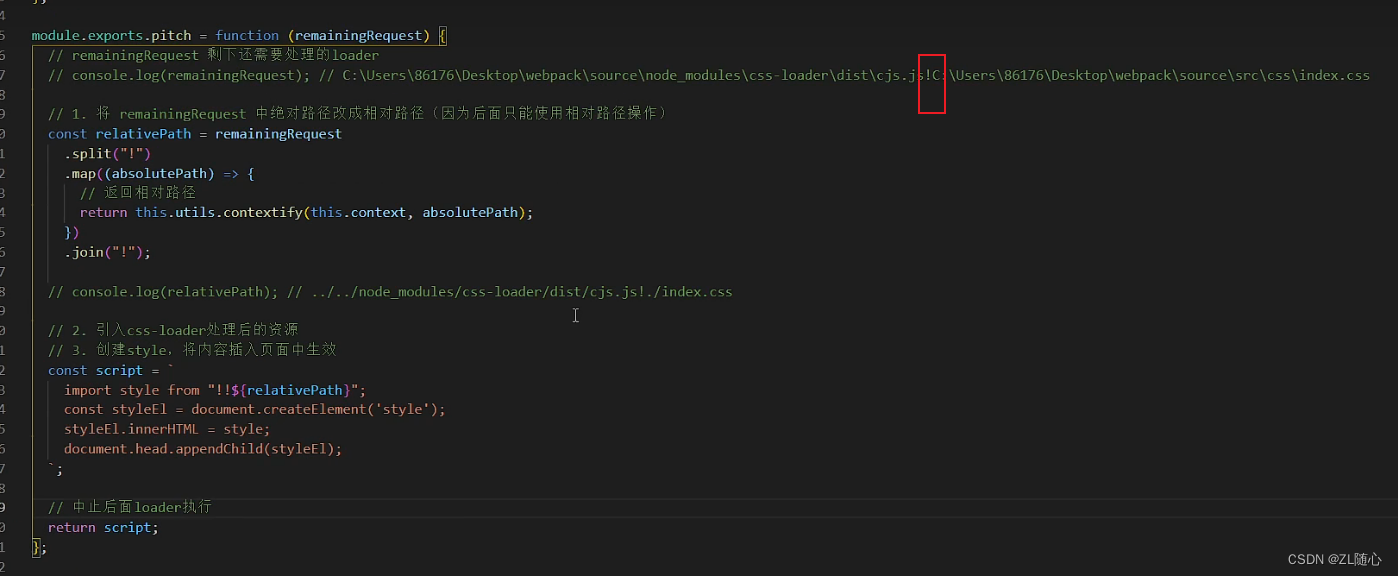
webpack loader
1、分类 2、执行顺序 配置类型 执行顺序是 loader1>loader2>loader3 3、使用方式 自己的第一个loader 同步loader /*** loader 就是一个函数* 当webpack 解释资源时, 会调用相应的loader去处理* loader 接收到文件内容作为参数,返回文件内容* p…...

Java—学生信息管理系统(简单、详细)
文章目录 一、主界面展示二、学生类三、系统功能方法3.1 main()方法3.2 添加学生信息3.3 删除学生信息3.4 修改学生信息3.5 查看所有学生信息 四、完整代码4.1 Student .Java4.2 StudentManger.Java 前言:本案例在实现时使用了Java语言中的ArrayList集合来储存数据。…...
Spring第一课,了解IDEA里面的文件,回顾Cookie和Session,获取Session,Cookie,Header的方式
目录 IDEA第一课(熟悉里面内容) 建立连接 -RequestMapping 路由映射 请求 1.传递单个参数编辑 2.多个参数编辑 3.传递数组 4.传递一个集合,但是这里我们传递的时候发生了500的错误 简单介绍JSON 回顾Cookie和S…...

AcWing113.特殊排序
题目 有 N N N 个元素,编号 1 , 2.. N 1,2..N 1,2..N,每一对元素之间的大小关系是确定的,关系具有反对称性,但不具有传递性。 注意:不存在两个元素大小相等的情况。 也就是说,元素的大小关系是 N N N…...

数据仓库岗面试
1.自我介绍 2.求用户连续登录3天,要讲出多种解法 解法1(使用SQL): SELECTuserid FROMloginrecord WHEREDATEDIFF(day, time, LAG(time) OVER (PARTITION BY userid ORDER BY time)) 1AND DATEDIFF(day, LAG(time) OVER (PARTI…...
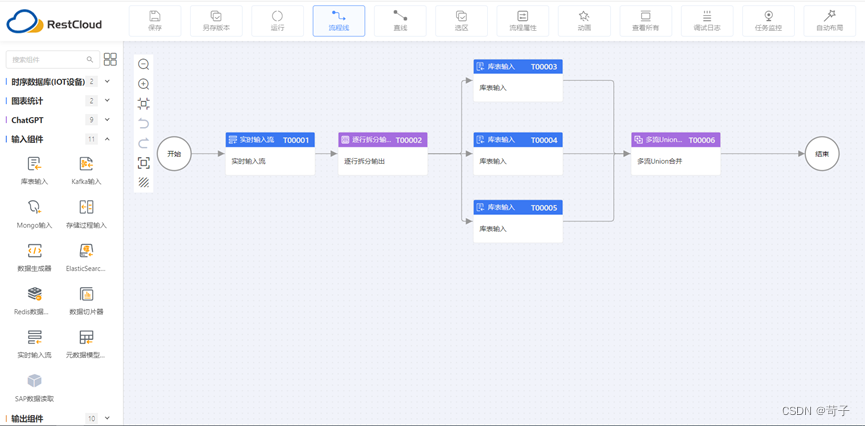
企业建数仓的第一步是选择一个好用的ETL工具
当企业决定建立数据仓库(Data Warehouse),第一步就是选择一款优秀的ETL(Extract, Transform, Load)工具。数据仓库是企业数据管理的核心,它存储、整合并管理各种数据,为商业决策和数据分析提供支…...

5分钟解决Windows系统臃肿:Win11Debloat终极优化指南
5分钟解决Windows系统臃肿:Win11Debloat终极优化指南 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and cus…...

别再自己造轮子了!Spring Boot文件上传,为什么MockMultipartFile只适合测试?
为什么MockMultipartFile在生产环境是个危险选择? 在Spring Boot开发中,文件上传是个高频需求。不少开发者为了快速实现功能,会直接使用MockMultipartFile来处理生产环境的文件上传。这看似省事的做法,实则暗藏巨大风险。上周团队…...

【初阶数据结构】 归序而上的云阶 堆
📖 点击展开/收起 文章目录 文章目录 1.堆的概念2.堆的接口实现堆的定义2.1 堆的初始化2.2 堆的销毁2.3 获取堆顶数据2.4 堆的向下调整2.5 堆的向上调整2.6 堆的插入2.7 堆顶数据删除2.8 堆的判空 3.完整代码展示Heap.hHeap.c 4.建堆方法1.向上调整建堆2.向下调整建…...
)
Agent记忆架构设计剖析系列:原理、权衡与场景适配(hermes设计原理)
Hermes 是一款主打 “自我进化” 的 Agent 框架,其记忆系统的核心设计哲学是认知经济性—— 即 “只记住对未来行为有价值的信息”,通过严格的记忆审查与精炼机制,将有限的计算资源集中于高价值记忆,实现了记忆质量与系统效率的平…...

Java AI推理引擎国产化落地:从OpenVINO到昇腾CANN,5步完成零信任环境下的无缝迁移
更多请点击: https://intelliparadigm.com 第一章:Java AI 推理引擎国产化集成的演进逻辑与战略价值 在信创生态加速落地的背景下,Java 作为企业级系统核心语言,正从传统业务逻辑承载者转向 AI 原生推理平台的关键底座。国产 AI …...

2026届毕业生推荐的六大AI学术工具推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 一款智能化写作辅助系统,是基于自然语言处理跟知识图谱技术构建的AI开题报告工具…...

别再只调超参了!给ResNet50加上SE模块,我的图像分类准确率提升了3%
别再只调超参了!给ResNet50加上SE模块,我的图像分类准确率提升了3% 当你在CIFAR-100上反复调整学习率和batch size却始终无法突破85%的准确率时,是否考虑过问题可能不在超参数,而在于模型架构本身?去年我在一个工业质检…...
Pixel Aurora Engine 模拟电路设计辅助:Proteus仿真图智能生成案例
Pixel Aurora Engine 模拟电路设计辅助:Proteus仿真图智能生成案例 1. 效果亮点预览 想象一下,当你刚拿到一个电路设计需求时,只需简单描述功能,就能立即获得完整的Proteus仿真原理图草稿。Pixel Aurora Engine让这个场景成为现…...

左值和右值:从根源理解 C++ 的引用与移动语义
在 C 里,“左值”和“右值”几乎是每一个进阶开发者绕不开的概念。它们看起来很基础——左值可以放在赋值号左边,右值只能放在右边——但这个朴素的定义在现代 C 中早已不够用了。C11 引入的右值引用、移动语义、完美转发,让这一对概念变得无…...

Arm架构SIMD与矩阵运算优化实战指南
1. A64指令集架构中的向量与矩阵数据处理概述在Armv8-A和Armv9-A架构中,向量和矩阵数据处理能力经历了显著演进。作为现代计算的核心加速手段,这些技术通过单指令多数据(SIMD)范式大幅提升了多媒体处理、科学计算和机器学习等场景的性能表现。传统标量处…...