机器人制作开源方案 | 钻孔植树一体化沙漠车
作者:徐邦国、张博宇、刘露、李晶晶、吕洁秀
单位:天津职业技术师范大学 机械工程学院
指导老师:何永利
摘要:本项目旨在设计一种专用于沙漠植树的植树车,以沙漠自动化植树为研究对象,提出一种创新式钻孔机构,再配以自动送苗机构,驱动机构,增设自动蓄能机构,GPS定位控制,制成了适用于在沙漠环境下全自动种植的植树车。实验结果表明,该装置工作稳定,性能可靠,功能实现效果良好,创新式提出了“钻植一体化钻头”,种植效率较传统植树车效率更高,结构简单,维修方便,成本较低,工艺制作简单,能更好实现沙漠植树机械化,大大提高沙漠环境下植树效率,实现全自动植树。
关键词:沙漠植树,钻植一体化钻头,全自动植树机
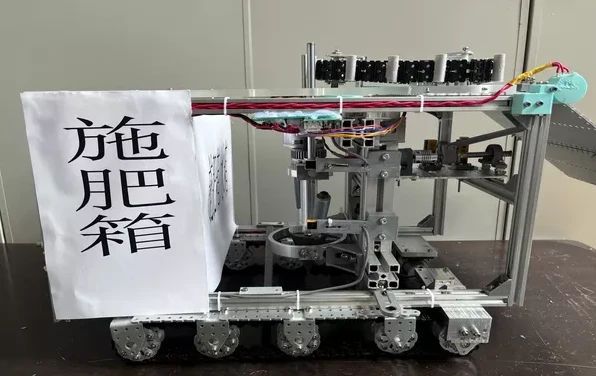
本作品根据本届机械创新设计大赛的主旨要求而设计,属于生态修复类机械,“钻孔植树一体化沙漠车”主体为金属框架结构,长570mm,宽280mm,高285mm,“钻孔植树一体化沙漠车”共有创新式钻孔机构、自动送苗机构、驱动机构、自动蓄能机构四大机构并配以MEGA328P主控芯片、大功率无线传输模块、GPS等控制元件。创新式钻孔机构利用电机经减速齿轮组传动使钻头在丝杠上旋转上升或下降,未到达指定位置时钻头旋转由于配重轴产生的离心力,使钻头处于闭合状态以完成沙漠钻孔动作,当到达指定位置后,限制圆环限制配重轴形态,使钻头随着丝杠向下旋转逐渐打开以完成孔内精确植树。植树完成后钻头向上旋转复位;自动送苗机构利用同步带配合光敏传感器进行送苗,将树苗精准送入导向管内;驱动机构利用齿轮组配合电机实现植树车的驱动,能较好地实现植树车在沙漠中直线或者转弯运动;自动蓄能机构利用丝杠带动太阳能板的抬升与放下,利用沙漠优越的光照条件,进行能源回收,紧跟国家脚步,发扬环保绿色精神。“钻孔植树一体化沙漠车”主要用于沙漠造林,可以实现钻孔、送苗、放苗、驱动、自动蓄能的一体化种植过程,使得整个植树过程真正实现机械化作业。“钻孔植树一体化沙漠车”较于传统植树车在植树时不用进行二次放苗定位,钻孔植树一体化,并增设MEGA328P主控芯片、大功率无线传输模块、GPS等控制元件在下达植树指令后实现自动化植树。
1. 研制背景及意义
1.1 研制背景
中国是世界上荒漠化面积最大、受影响人口最多、风沙危害最重的国家之一。全国荒漠化土地总面积261.16万平方公里,占国土面积的 27.2%。岩溶地区石漠化土地面积为 1007万公顷。在“绿水青山就是金山银山”的理念指导下,各地区日益注重经济发展与环境保护的协同发展,明确森林资源培育的重要性,加大植树造林工程的规模,拓展造林空间,提升区域林业发展质量。尽管现阶段我国植树机械的机型众多,但在实际植树造林工作中应用的比例仍明显不足,很多地区受限于经费和环境条件,仍在以人力造林为主,造成了劳动量大、效率低等问题。而现有的植树机存在作业量大,导致对土壤扰动大,机械消耗功率大等问题,尤其在沙漠环境下,植树都以人工为主,因为沙漠中恶劣环境,很少有专门适用于沙漠环境下的全自动植树车。

1.2 意义
沙漠植树可保持水土、抵挡风沙,而基于以上存在问题与植树机械结合生态植树的理念,我们意在开发一种适用于沙漠环境的全自动植树车,可解决现有以人力造林为主,造成了劳动量大、效率低等问题并能适应沙漠恶劣环境进行能源回收。“钻孔植树一体化沙漠车”将传统植树车无法解决的沙土回填问题转为优势,采用钻孔植树一体化钻头,有效提高了工作效率,并在植树的同时减少对土壤扰动,避免对环境造成伤害。
2. 设计方案
2.1 总体设计构想
“钻孔植树一体化沙漠车”将分为四大机构,创新式钻孔机构进行钻孔与钻孔后植树的任务,自动送苗机构承担将树苗精准投入导向管内以便于植树。驱动机构负责在沙漠环境下整个机体的驱动,自动蓄能机构能在沙漠阳光充足的情况下抬起太阳能板进行能源回收,在结束后收回太阳能板为车体提供所需动力,整车辅以电控系统,实现沙漠环境下全自动植树。
2.2 方案比较
2.2.1创新式钻孔机构方案对比
方案一:利用多杆机构实现钻头的打开与闭合,并利用丝杠为钻头部分传递动力,实现钻头的上升与下降。
方案二:利用增设配重轴与限位圈的配合实现钻头的开合,并利用减速齿轮组辅以螺母在丝杠传转动为钻头提供动力,实现钻头的旋转上升与下降。
表1 创新式钻孔机构对比表

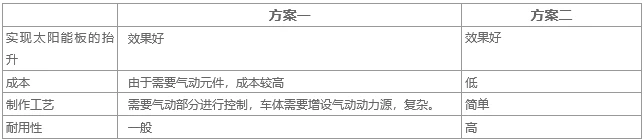
2.2.2自动蓄能机构方案对比
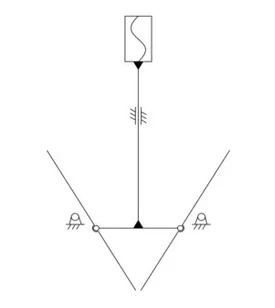
方案一:利用气缸实现太阳能板的抬升与放下。
方案二:丝杠滑块并联杆件实现太阳能板的抬升与放下。
表2 自动蓄能机构对比表
2.3 方案确定
2.3.1创新式钻孔机构方案确定
综合表一对比,创新式钻孔机构采用方案二。
创新式钻孔机构通过一种动力源完成钻孔、植树一体化的复合运动,通过电机输出动力,经减速齿轮组后带动螺母在丝杆上旋转,实现钻整体机构的往复回转运动,当钻头未到达限位圈时由于俩配重轴旋转产生的离心力,钻尖在钻孔时保持闭合,到达限位圈后,由于配重轴改变旋转形态,使得钻尖打开进行植树。植树完毕后,钻头复位,本机构解决了传统植树装置难以克服的沙土回填问题,将其劣势转换为优势,有效提高植树效率。
2.3.2自动蓄能机构方案确定
综合表二对比,自动蓄能机构采用方案二。
自动蓄能机构通过丝杠螺母运动串联摆杆滑块机构,达到最佳的蓄能角度,并设有角度传感器控制太阳能板开合角度及霍尔接近开关做安全保护。
3. 理论设计
3.1 设计要求
本作品适用于环境恶劣不易克服沙土休止角的沙漠地带,须确定树苗种类、电机寿命及电机选型计算、电控部分设计。
3.2 树苗选择
根据沙漠环境对树苗进行选择,共有胡杨树苗、红柳苗、花捧苗三种可供选择。
表3 树苗对比表
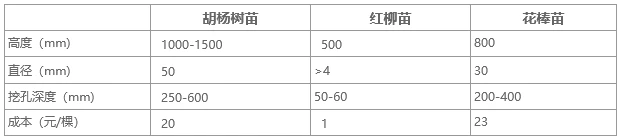
经过表三对比,与成活率调研并分析性价比,最后选择以“沙漠战士”胡杨为我们植树车种植树苗的原型,胡杨苗多采用一年生,高度为1000—1500毫米,直径为50毫米,挖孔深度为250-300毫米。
3.3运动尺寸和总体尺寸
等比例缩小后,植树机样机整体长宽高为570mm*280mm*285mm,树苗高度为125mm,挖孔深度为30mm,创新式钻孔机构丝杠行程为87mm。
3.4 电机寿命计算
产品的使用寿命,很大程度上取决于步进电机的寿命。 步进电机的寿命是由轴承、电磁线、磁钢的寿命所决定,在额定使用条件下,寿命最短的是轴承。
轴承寿命计算公式:
(注:以上公式适用于轴承工作时温度低于120°)
C是基本额定动负荷(轴承的基本参数),单位N
P是当量动负荷(轴承工作时所受的外载荷),单位N
n为代表轴承的工作转速(电机转速)(r/min)
ε为寿命指数,对于球轴承ε=3;对于滚子轴承ε=10/3
由以上公式可以看出轴承的使用寿命与转速和轴承工作时所受的外载荷有关,即转速越高、外载荷越大,则寿命越短,而我们使用转速不高外载荷不大场合。
在不变的径向和轴向载荷作用下,当量动载荷P的计算公式是:
![]()
式中:
Fr为轴承所受的径向载荷(N),即轴承实际载荷的径向分量
Fa为轴承所受的轴向载荷(N),即轴承实际载荷的轴向分量
X为径向载荷系数,将实际径向载荷Fγ转化为当量动载荷的修正系数
Y为轴向载荷系数,将实际轴向载荷Fa转化为当量动载荷的修正系数
Fp为载荷系数,轻微冲击时为1~1.2,中等冲击(或中等惯性力)为1.2~1.8
P=30.93
综合步进电机、传感器等因素预估寿命10年,在规定范围内。
3.5钻头破土压力计算及电机选型

式中,Pp是地层孔隙压力(在正常情况下,地层孔隙压力等于静液柱压力),MPa;
Pf是地层流体密度,g/cm3
g是重力加速度,9.81 m/s2
H是该点到水平面的垂直高度,m
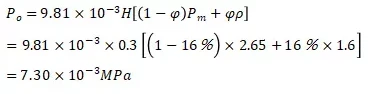
式中,P0是上覆岩层压力,MPa;
H是目的层的深度,m;
φ是岩石孔隙度,%;
ρ是岩层孔隙流体密度,g/cm3;
Pm岩石骨架密度。g/cm3;
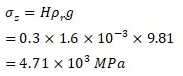
σs是有效上覆岩层压力,MPa;
ρr是上覆岩层的总平均密度,Kg/m3;
g是重力加速度,9.81 m/s2
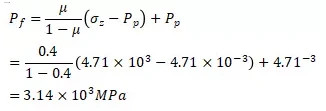
式中,Pf是地层破裂压力,MPa
μ是地层层泊松;

式中,M是破开力所需扭矩;
L是目的层深度
F是破开沙层的力度

式中,P是额定功率
F是破土压力
V是转速
综上所述,选择额定功率为10W,扭矩为0.012 KG·M符合电机需求。
3.6控制系统硬件设计
植树车设计控制系统设计由MEGA328P主控芯片、大功率无线传输模块、霍尔接近开关、直流电机驱动模块、步进电机驱动、电源转换模块、GPS以及电池等组成。
直流电源会给主控芯片、传感器及附属设备供电,主控芯片通过无线传输模块和GPS获取和发送数据到控制器,由控制信号通过电机驱动去控制各个电机,而传感器的作用是获取反馈信号用于判断机械结构是否到位来达到精准定位作用。

3.6.1控制器(ATMEL MEGA328p)
植树车的主控芯片选取的型号为ATMEL MEGA328p,它是一种高性能、低功耗的AVR微控制器、它具有6通道PWM,8路的10位ADC,先进的RISC结构,工作于20MHZ时性能高达20MIPS,非易失性程序和数据存储器,32K字节的系统内可编程flash,2K字节的片内SRAM,1024字节的EEPROM,可以对锁定位进行编程以实现用户程序的加密,它还具有独立预分频器和比较器功能的8位定时器/计数器,最重要的是它还可以通过Arduino进行编程。

3.6.2无线电通信芯片(NRF24L01)
NRF24L01是NORDIC公司生产的一款无线通信通信芯片,可以实现点对点或是1对6的无线通信。低功耗 1.9 - 3.6V 工作,待机模式下状态为 22uA;掉电模式下为 900nA,模块可软件设地址,只有收到本机地址时才会输出数据(提供中断指示),可直接接各种单片机使用,软件编程非常方便,内置专门稳压电路,使用各种电源包括 DC/DC 开关电源均有很好的通信效果, 具有可选的内置包应答机制,极大的降低丢包率。
3.6.3霍尔接近开关
霍尔接近开关具有无触电、功耗低、使用寿命长、响应频率高等特点,内部采用环氧树脂密封,可以在各种恶劣环境下可靠工作,外壳接近开关可用于接近开关、压力开关、里程表等新型电气配件。它具有NPN和PNP两种输出方式,工作温度可在零下25度到零上70度之间,以及具有IP67的防水等级。接近开关优点,接近开关由于能以非接触方式进行检测,所以不会磨损和损伤被检测对象。接近开关多采用了半导体三极管做控制信号输出,相对用机械动作输出控制,由于采用无触点输出方式,因此采用半导体输出具有反应速度快,使用寿命更长,对触点的寿命无影响。

3.6.4 GPS模块
ATGM336H-5N系列模块是小尺寸的高性能BDS/GNSS全星座定位 导航模块系列的总称。该系列模块产品都是基于中科微第四代低功耗GNSS SOC单芯片—AT6558,支持多种卫星导航,包括中国的BDS(北斗卫星 导航),美国的GPS,俄罗斯的GLONASS,欧盟的GALILEO,日本的QZSS 以及卫星增强SBAS(WAAS,EGNOS,GAGAN,MSAS)。AT6558 是一 款真正意义的六合一多模卫星导航定位芯片,包含32 个跟踪通道,可以同时接 收六个卫星导航的GNSS 信号,并且实现联合定位、导航与授时。 ATGM336H-5N本系列模块具有高灵敏度、低功耗、低成本等优势,适用于 车载导航、手持定位、可穿戴设备,可以直接替换Ublox MAX系列模块。
输出协议:
ATGM332D-5N 系列模块通过 UART 作为主要输出通道, 按照NMEA0183 的协议格式输出,具体信息请参照《CASIC 多模卫星导航接收机协议规范》 。
性能指标:
出色的定位导航功能, 支持 BDS/GPS/GLONASS 卫星导航的单定位,以及任意组合的多联合定位,并支持 QZSS 和 SBAS。
支持 A-GNSS
冷启动捕获灵敏度:-148dBm
跟踪灵敏度:-162dBm
定位精度:2.5 米(CEP50,开阔地)
定位时间:32 秒
低功耗:连续运行<25mA(@3.3V)
内置天线检测及天线短路保护功能

4. 工作原理
4.1创新式钻孔机构工作原理
创新式钻孔机构处于初始状态时(如下图所示),通过电机提供动力,经减速齿轮组减速后将动力传动到螺母上,螺母在丝杠上转动带动整体机构旋转下降,在旋转过程中由于配重轴产生的离心力不会使钻头在中途打开,以完成钻孔动作。
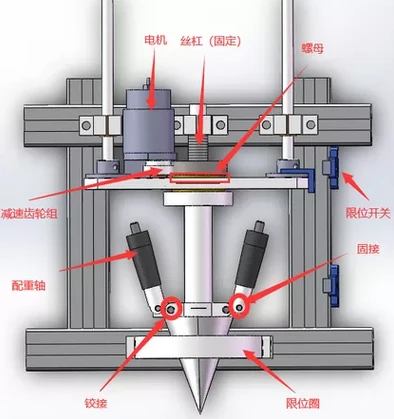
当钻头旋转下降到位后(如下图所示)既钻孔完成后,随着钻头继续下降配重轴逐渐因为限位圈的限制改变旋转形态,使得配重轴沿限位圈内壁进行旋转,配重轴与钻头部分为固接,使得钻头打开,自动送苗机构将树苗投入导向管内,树苗沿导向管从钻头开口处落下,钻头缓慢上升完成植树过程。

创新式钻孔机构通过一种动力源即可完成钻孔、植树一体化的复合运动,并且具有很高的植树精度。创新式钻孔机构解决了传统植树装置难以克服的沙土回填问题,将其劣势转换为优势,有效提高植树效率。
4.2总体工作流程
到达种植场地下达植树任务后,植树车利用 GPS 根据树苗的行株间距确定种植地点,植树车利用丝杠滑块使连杆抬起自动蓄能机构,植树车到达第一个种植点后,创新式钻孔机构旋转下降开始钻孔,到达钻孔深度后,钻头打开并电机停转,自动送苗机构通过带传动将储苗仓转到导向管上方,光敏传感器收信号后,自动送苗机构停转,树苗通过导向管掉入孔中,钻头缓慢上升,同时周围的沙子因为沙土的回填性进行第一次回填,钻头复位后,GPS规划下一种植点,驱动机构驱动车体移动时,车体的回填杆对树苗进行二次回填,完成种植。重复上述过程,直到完成全部种植任务。
4.3性能分析
“钻孔植树一体化沙漠车”主体为金属框架结构,长570mm,宽280mm,高285mm,“钻孔植树一体化沙漠车”共有创新式钻孔机构、自动送苗机构、驱动机构、自动蓄能机构四大机构并配以MEGA328P主控芯片、大功率无线传输模块、GPS等控制元件。创新式钻孔机构结构巧妙,可以由一个动力源完成钻头旋转,下降及钻尖部分的开合运动,实现钻孔、植树一体化,无需进行二次定位。自动蓄能机构利用丝杠带动太阳能板的抬升与放下,利用沙漠优越的光照条件,进行能源回收,紧跟国家脚步,发扬环保绿色精神。
“钻孔植树一体化沙漠车”种植效率较传统植树车效率更高,结构简单,维修方便,成本较低,工艺制作简单,能更好实现沙漠植树机械化,大大提高沙漠环境下植树效率,实现全自动植树。
5. 创新点及应用
5.1 创新点
① 效率化,创新式钻孔机构,钻孔植树一体化,使效率更高效。
② 高精度,钻孔后投苗的高精度,无需进行二次定位,使树苗成活率更高。
③ 模块化设计,结构简单,维修方便,运动更为可靠。
④ 有效解决人工植树劳动量过大,传统植树机效率低的问题。
⑤ 设计巧妙,通过机械结构创新实现一个动力源完成钻头旋转,下降或上升,钻头开合运动。
5.2 应用前景
① 本项目提出的智能“一体化”植树机旨在解决荒漠化日益严重而植树人工成本持高不下的困境,使用创新性的一体化钻头,自动下钻、开合放苗、回升闭合,无需人工转换操纵即可通过太阳能驱动,绿色高效地完成钻孔和种植的配合工作。
② 利用机械工程的知识,打破常规机体功能单一的弊端。在智能钻孔,防止沙土回填,联动循环放苗等方面实现创新性优化,在现代机械化植被修复的进程上迈出了绿色高效的一步。
③ 不论从我国客观国情,还是从国家有关政策而言,植树机尤其是全自动植树机具有很大的市场潜力。 本作品的车身采用左右电机差动方式驱动,可实现直线运动、转弯等行走方式。 所以它既能沿一条直线植树,又能按照多种排列方式植树,并且能够同时交叉种植多种树苗。 本作品植树方式灵活,功能较强,采用的多种机构技术成熟,所用承载车身可由普通轻型卡车改装而成。 产品可由一般汽车车辆制造厂家或农用机械厂承接生产,作品转为产品的可能性较大。 全自动、高效率、适用范围广是该植树机的主要特点,它适用于大面积植树,尤其在人力无法完成的地方。
6. 总结
立旨于本届国际青年人工智能大赛探索者创新设计赛,对现阶段我国的沙漠机械植树进行了调研分析,由于林业生产作业环境恶劣、作业强度大,针对性的设计了这款植树车。提出了钻植一体化,巧妙地将多个机构集成,便制成了一种植树一体化的植树车,实现以沙漠树苗及环境特点为中心的设计,将恶劣的沙漠环境转化为对我们沙漠植树有利的条件,根据各个原动件的运动规律,确定各个机构的运动性能,验证各机构的合理性。通过对机构的运动分析,确定了植树机的运动平稳性良好,植树过程平稳可靠达到预期设计要求使产品更趋合理,为沙漠植树提供极大的方便。
参考文献
[1] 机械设计(第八版). 高等教育出版社,2006.5:392-398
[2] 机械原理 高等教育出版社,2006.1:78-92
[3] 机械设计手册 机械工业出版社,2018(11) :130-132,136.
[4] 赵德金、郭艳玲、宋文龙,国内外数目移植机械的研究现状与发展趋势
[5] 徐科军,传感器与检测技术(第四版),电子工业出版社
[6] 邱关源,电路原理(第五版),高等教育出版社
[7] 韦文平,植树造林与病害防治的主要措施方法探究,现代园艺,2021,44(16),42-43
* 更多详情请见 【S024】钻孔植树一体化沙漠车
相关文章:
机器人制作开源方案 | 钻孔植树一体化沙漠车
作者:徐邦国、张博宇、刘露、李晶晶、吕洁秀单位:天津职业技术师范大学 机械工程学院指导老师:何永利 摘要:本项目旨在设计一种专用于沙漠植树的植树车,以沙漠自动化植树为研究对象,提出一种创新式钻…...
OmniGraffle
安装 在mac上安装OmniGraffle,找一个正版或者啥的都行,安装好后,可以直接在网上找一个激活码,然后找到软件的许可证,进行添加即可。 使用 新建空白页 然后图形啥的看一眼工具栏就知道了,颜色形状还是挺…...

【C++上层应用】4. 多线程
文章目录 【 1. 创建线程 】【 2. 终止线程 】【 3. 实例 】【 4. 向线程传递参数 】【 5. 连接和分离线程 】 多线程 是多任务处理的一种特殊形式,多任务处理允许让电脑同时运行两个或两个以上的程序。一般情况下,两种类型的多任务处理:基于…...
【uni-app】uniapp中弹出输入框的示例
uni.showModal({title: 请输入企业名称,content: ,editable: true, //是否显示输入框placeholderText: 请输入企业名称, //输入框提示内容confirmText: 确认,cancelText: 取消,success: (res) > {if (res.confirm) {this.checkDesc.name res.content;// console.log(输入的…...
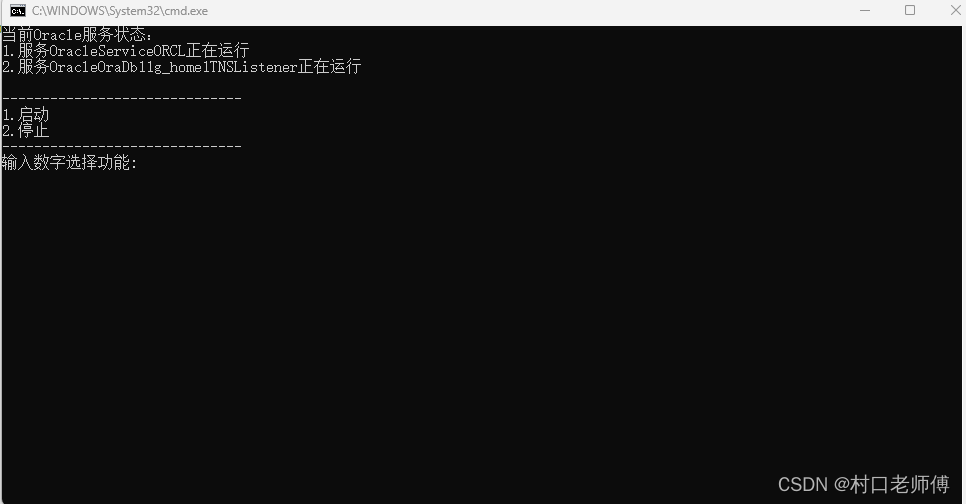
通过bat脚本控制Oracle服务启动停止
1、将Oracle服务全部设置为手动启动 初始安装Oracle之后服务启动状态: 2、服务功能介绍 3、构建服务启动/停止bat脚本 注意:编码选择ANSI(如果编码不是ANSI运行脚本会显示乱码) echo off :main cls echo 注:请保证该脚本是使用管理员权限…...
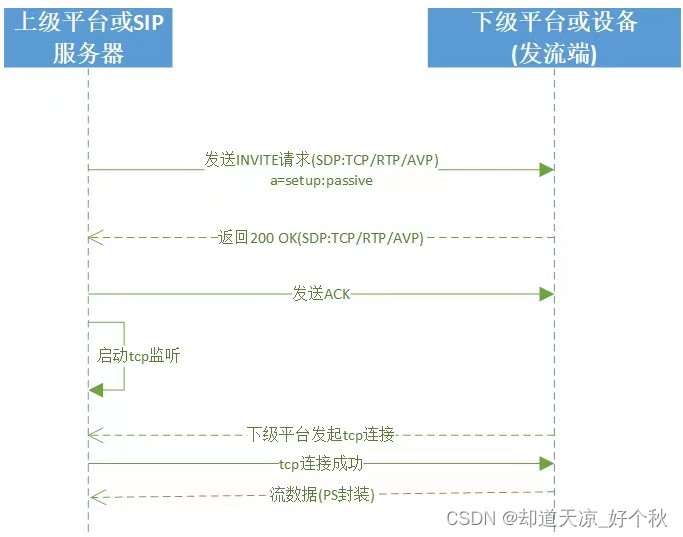
GB28181学习(十七)——基于jrtplib实现tcp被动和主动发流
前言 GB/T28181-2022实时流的传输方式介绍:https://blog.csdn.net/www_dong/article/details/134255185 基于jrtplib实现tcp被动和主动收流介绍:https://blog.csdn.net/www_dong/article/details/134451387 本文主要介绍下级平台或设备发流功能&#…...

RealSense深度相机在Ubuntu18.04的ros环境下,保存同一时刻下深度图像和彩色图像
背景:Ubuntu18.04 ROS Melodic 已安装配置好RealSense相关程序,链接D435i相机后,得到如下Rostopic: /camera/color/image_raw # 彩色图像信息 /camera/depth/image_rect_raw # 深度图像信息 于是写一个python程序&am…...

vue3 ref和reactive使用watch属性的方法和区别
在Vue 3中,您可以使用watch函数和watch选项来监视ref和reactive创建的响应式数据的变化。下面是它们的使用方法和区别: 使用方法: 使用ref和watch: import { ref, watch } from vue;const count ref(0);watch(count, (newVal,…...
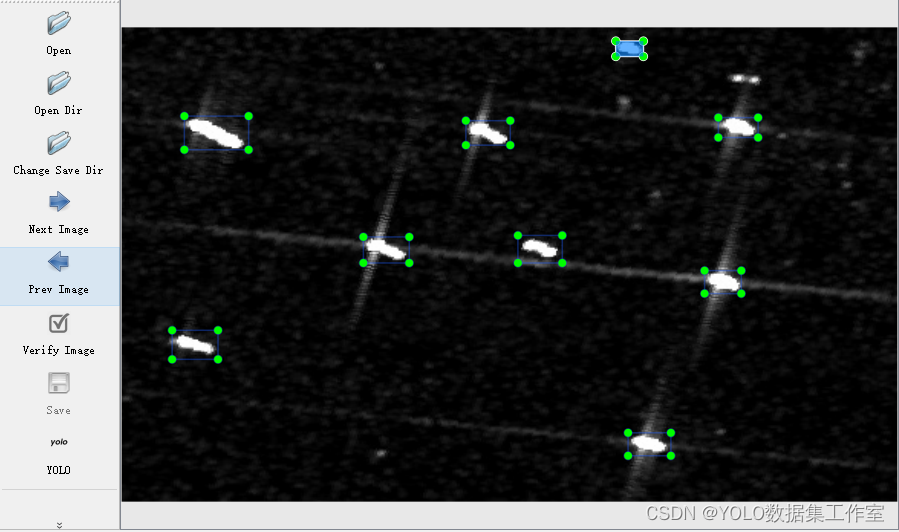
YOLO目标检测——卫星遥感舰船检测数据集下载分享【含对应voc、coco和yolo三种格式标签】
实际项目应用:卫星遥感舰船检测数据集说明:卫星遥感舰船检测数据集,真实场景的高质量图片数据,数据场景丰富,含船一个类别标签说明:使用lableimg标注软件标注,标注框质量高,含voc(xm…...

org.Hs.eg.db使用--持续修改
org.Hs.eg.db使用–持续修改 加载 library(org.Hs.eg.db)1 基本信息查询 1.1 display the columns columns(org.Hs.eg.db) [1] "ACCNUM" "ALIAS" "ENSEMBL" "ENSEMBLPROT" "ENSEMBLTRANS" "ENT…...
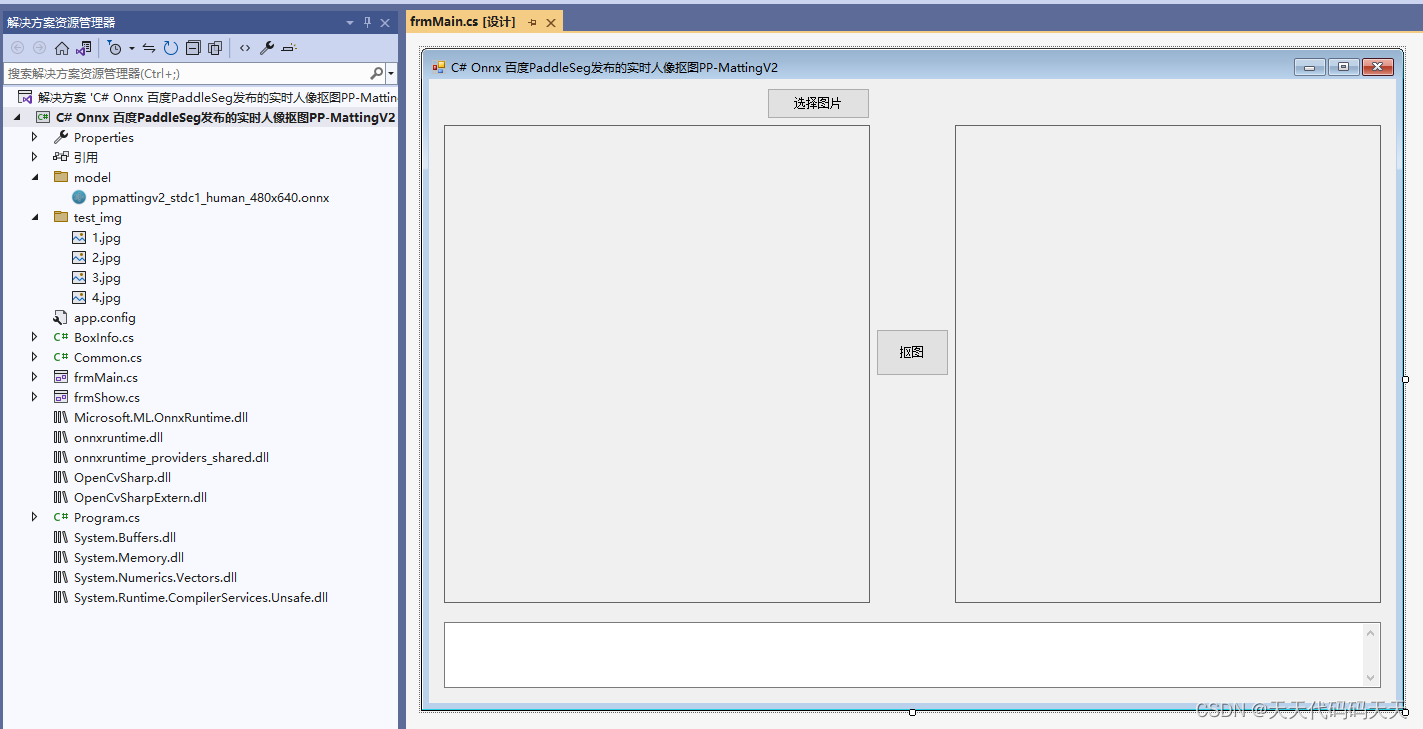
C# Onnx 百度PaddleSeg发布的实时人像抠图PP-MattingV2
目录 效果 模型信息 项目 代码 下载 效果 图片源自网络侵删 模型信息 Inputs ------------------------- name:img tensor:Float[1, 3, 480, 640] --------------------------------------------------------------- Outputs -----------------…...

linux shell操作 - 04 进程间通信
文章目录 Signal 信号信号定义信号的生命周期信号分类linux进程通信案例 Signal 信号 信号定义 Linux信号是进程间通信的一种方式,通过向目标进程发送一个特定的信号,让其执行相应的处理操作; 向目标进程发送信号时,内核会将信号…...
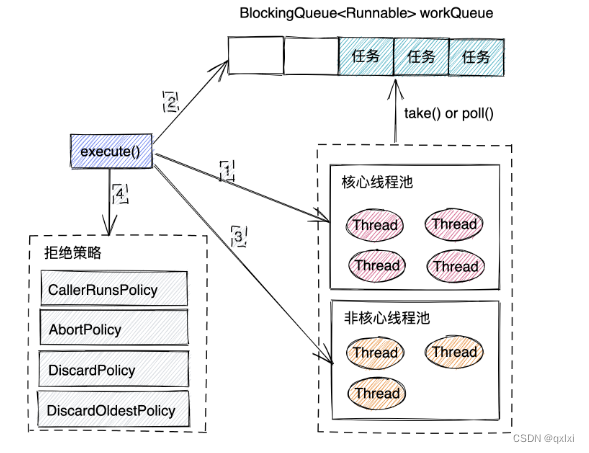
【Java并发】聊聊线程池原理以及实际应用
线程其实对于操作系统来说是宝贵的资源,java层面的线程其实本质还是依赖于操作系统内核的线程进行处理任务,如果频繁的创建、使用、销毁线程,那么势必会非常浪费资源以及性能不高,所以池化技术(数据库连接池、线程池&a…...

自然语言处理常用方法和评价指标
常用方法 文本分类:如情感分析、主题标签分类。使用方法如朴素贝叶斯、支持向量机、神经网络等。信息提取:从文本中提取结构化信息,如命名实体识别(NER)、关系提取。语义分析:理解文本的含义,包…...
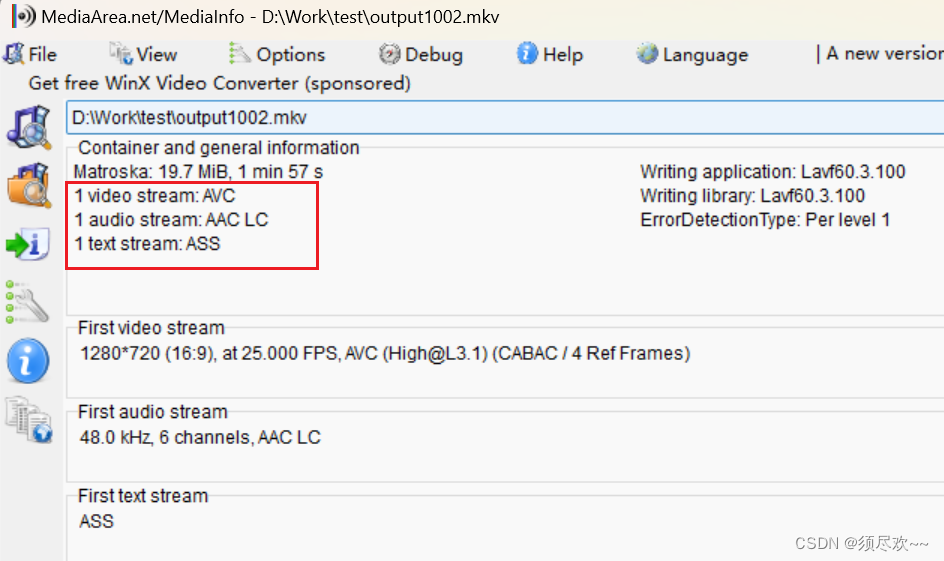
FFmpeg常用命令行讲解及实战一
文章目录 前言一、学习资料参考二、FFmpeg 选项1、主要选项①、主要命令选项②、举例 2、视频选项①、主要命令选项②、举例1)提取固定帧2)禁止输出视频3)指定视频的纵横比 3、音频选项①、主要命令选项②、举例 4、字幕选项①、主要命令选项…...

Java的ArrayList中关于删除的常用操作及方法
目录 remove(int index)方法 remove(Object o)方法 removeAll(Collection c)方法 removeIf(Predicate filter)方法 removeRange(int fromIndex, int toIndex)方法 remove(int index)方法 remove(int index)是ArrayList类中用于删除指定位置元素的方法。它接收一个整…...
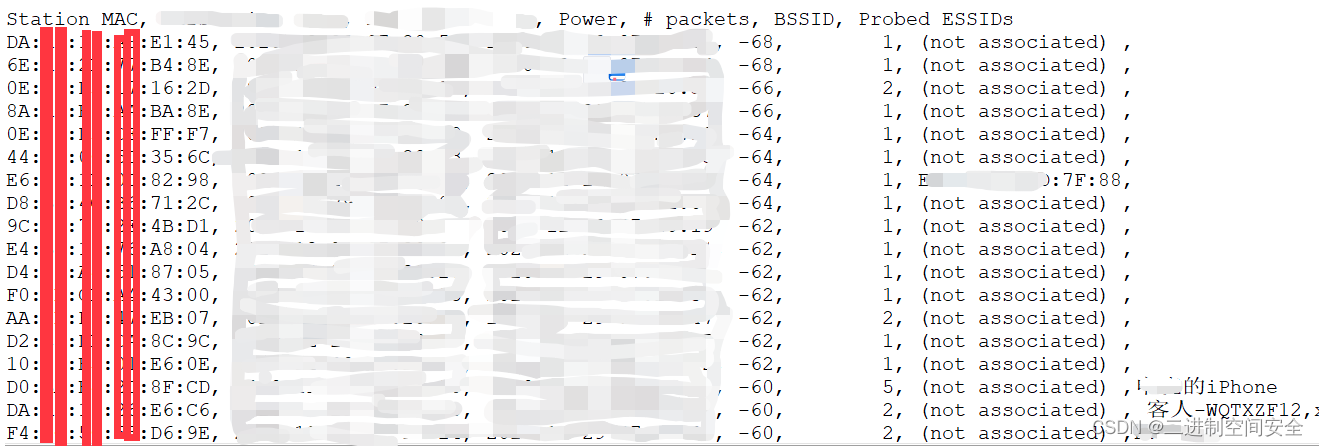
低成本打造便携式无线网络攻防学习环境
1.摘要 一直以来, 无线网络安全问题与大众的个人隐私息息相关, 例如: 为了节省流量, 连接到一个看似安全的免费WiFi, 在使用过程中泄露自己的各类密码信息甚至银行卡账号密码信息。随着家用智能电器的普及, 家中的各类智能设备连入家里的无线网络, 却突然失灵, 甚至无法正常连…...

Qt|QLabel显示刷新图像数据
参考:QImage、QClipboard(https://zhuanlan.zhihu.com/p/649611141) 获取图像数据并转换为QImage unsigned char *data 图像数据; QImage show_image_ QImage(data, imgInfo.width, imgInfo.height, imgInfo.width, QImage::Format_Grays…...

Java类加载那些事
Java源文件(.java文件)被编译器编译后变为字节码形式的类文件(.class文件),Java类加载的过程就是JVM加载.class的二进制文件并且放到内存中,将数据放到方法区,并且在堆区构造一个java.lang.clas…...

QSplitter分裂器
QSplitter QSplitter 是 Qt 框架提供的一个小部件(widget),用于在用户界面中创建可拖动的分割窗口,允许用户调整子部件的大小和布局。它可以将父部件分割为多个可调整大小的子部件,使用户能够自定义界面的布局和大小。…...

AgentDS:领域数据科学中人机协作框架解析
1. 项目概述AgentDS这个项目名称本身就蕴含着丰富的内涵。"Agent"暗示了某种自主性或半自主性的智能体,"DS"显然是Data Science(数据科学)的缩写,而"领域数据科学"则进一步限定了应用范围。从标题来…...

如何在5分钟内免费搭建OBS RTSP服务器:完整配置指南
如何在5分钟内免费搭建OBS RTSP服务器:完整配置指南 【免费下载链接】obs-rtspserver RTSP server plugin for obs-studio 项目地址: https://gitcode.com/gh_mirrors/ob/obs-rtspserver 你是否想过将OBS Studio的专业直播内容直接推送到监控系统、智能电视或…...

告别文档大海捞针:Cloudreve API文档搜索快捷键终极指南
告别文档大海捞针:Cloudreve API文档搜索快捷键终极指南 【免费下载链接】Cloudreve 🌩 Self-hosted file management and sharing system, supports multiple storage providers 项目地址: https://gitcode.com/gh_mirrors/cl/Cloudreve 在使用C…...

SOCD Cleaner终极指南:彻底解决键盘输入冲突,提升游戏操作精度
SOCD Cleaner终极指南:彻底解决键盘输入冲突,提升游戏操作精度 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 你是否在玩格斗游戏时,因为同时按下W和S键导致角色动作卡顿&am…...

深入解析自动化任务执行框架:从核心原理到生产实践
1. 项目概述:一个多功能的自动化任务执行框架最近在梳理手头的一些重复性工作流时,发现很多任务虽然逻辑简单,但步骤繁琐,涉及多个工具和平台的切换。比如,我需要定期从几个不同的数据源抓取信息,进行初步清…...

NCM文件解密终极指南:免费工具快速解锁网易云音乐加密格式
NCM文件解密终极指南:免费工具快速解锁网易云音乐加密格式 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾遇到过从网易云音乐下载的歌曲只能在特定软件中播放的困扰?那些以.ncm为扩展名的文件&#…...

英文论文AI率高达95%怎么救?实测5款降AIGC工具,这3个手改技巧稳降至0%
留学生降ai成了一个大难题,很多同学都在问怎么给英文降ai,外文导师对AI查得非常严,如果turnitin检测ai率太高就麻烦了。 我也试过网上一大堆免费降ai率工具,踩了一大堆坑,今天不说虚的,给大家分享一下我的…...

一个非技术人员的低代码学习路径
作为一名市场部运营,我没有专业编程基础,日常工作和代码开发几乎不沾边。每天除了活动策划、数据统计、部门协作对接,经常会被各类零散审批、台账统计、信息汇总等琐碎工作消耗大量时间。 一直想找一种简单高效的方式,自己搭建轻量…...

星动纪元宣布融资2亿美元:顺丰领投 红杉IDG加持
雷递网 乐天 4月27日星动纪元今日宣布融资超过2亿美元,本轮融资由顺丰集团领投;红杉中国、IDG资本、中金资本、京铭资本、朝希资本、鲁信创投、聚合资本、隆启投资等财务机构联合注资;科捷智能、东风产投、工银资本、联通旗下基金等多家头部产…...

YOLO-Pose量化实战:从浮点到8位整型,在边缘设备上跑出SOTA AP50
YOLO-Pose量化实战:从浮点到8位整型的高效部署指南 姿态估计技术正从实验室快速走向工业落地,而YOLO-Pose作为首个将目标检测与关键点检测统一的无热图方案,其90.2%的COCO AP50精度与实时性优势已引发行业关注。但当工程师真正尝试将其部署到…...