激光slam学习笔记2--激光点云数据结构特点可视化查看
背景:不同厂商的激光点云结果存在一定差异,比如有些只有xyz,有些包含其他,如反光率、时间戳、ring等。如何快速判断是个值得学习的点
概要:对于rosbag类型的激光点云,介绍使用rviz快速查看点云结构特点
如何从rviz加载话题可视化在 ros master中的点云话题不做展开介绍
1、操作说明
右击rviz空白处->勾选 Selection (新增一块界面1)-> 左击Select -> 拉选点云 -> 在界面1的点击Point展开项,如图:
禾赛激光128激光雷达点云例子:
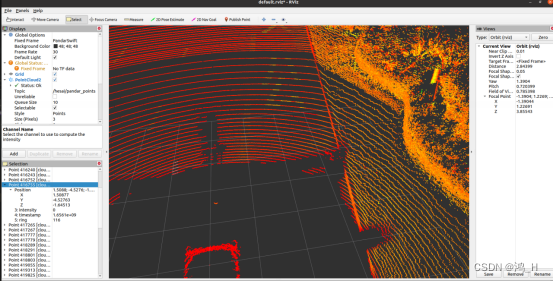
从上图中看出:
禾赛激光雷达的点云信息:
x
y
z
intensity
timestamp
ring
velodye激光点云例子:
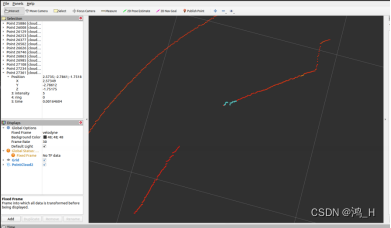
从上图看出:
而对于velodyn点云信息:
x
y
z
intensity
ring
time
2、延伸
上面两个厂商点云结构可以看出,虽然包含的信息一致,但是对应的信息名称不一定一致,所以访问操作时得注意
#####################
不积硅步,无以至千里
好记性不如烂笔头
相关文章:
激光slam学习笔记2--激光点云数据结构特点可视化查看
背景:不同厂商的激光点云结果存在一定差异,比如有些只有xyz,有些包含其他,如反光率、时间戳、ring等。如何快速判断是个值得学习的点 概要:对于rosbag类型的激光点云,介绍使用rviz快速查看点云结构特点 如…...
SpringBoot笔记【JavaEE】
SpringBoot概念、创建和运行 1.什么是SpringBoot?为什么学习SpringBoot? Spring Boot 就是 Spring 框架的脚⼿架,它就是为了快速开发 Spring 框架⽽诞⽣的。 2.Spring Boot优点 快速集成框架【提供启动添加依赖的功能】内容运行容器【无需…...

目标检测算法之voxelNet与pointpillars对比
算法对比 3D目标检测发展简史 点云目标检测目前发展历经VoxelNet、SECOND、PointPillars、PV-RCNN。 2017年苹果提出voxelnet,是最早的一篇将点云转成voxel体素进行3D目标检测的论文。 然后2018年重庆大学的一个研究生Yan Yan在自动驾驶公司主线科技实习的时候将vo…...
电脑里的连接速度双工模式是什么?怎么设置
双工模式包括全双工、半双工模式。1.半双工1、半双工数据传输允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信。所谓半双工就是指一个时间段内只有一个动作发生。早期的对…...
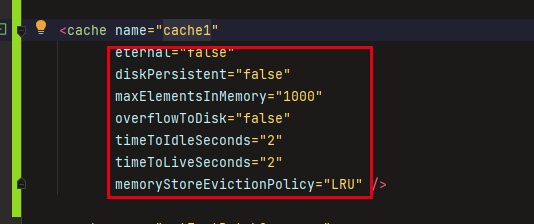
springboot整合单机缓存ehcache
区别于redis的分布式缓存,ehcache是纯java进程内的单机缓存,根据不同的场景可选择使用,以下内容主要为springboot整合ehcache以及注意事项添加pom引用<dependency><groupId>net.sf.ehcache</groupId><artifactId>ehc…...

在阿里干了2年的测试,总结出来的划水经验
测试新人 我的职业生涯开始和大多数测试人一样,开始接触都是纯功能界面测试。那时候在一家电商公司做测试,做了一段时间,熟悉产品的业务流程以及熟练测试工作流程规范之后,效率提高了,工作比较轻松,这样我…...
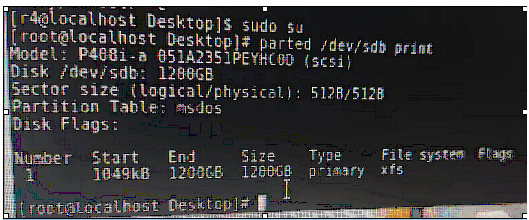
硬盘分类及挂载硬盘知识补充和介绍
一、硬盘介绍Linux硬盘分IDE硬盘和SCSI硬盘,目前基本上是SCSI硬盘1.对于IDE硬盘,驱动器标识符为"hdx~",其中"hd"表明分区所在设备的类型,这里是指IDE硬盘了。"x"为盘号(a为基本盘,b为基…...
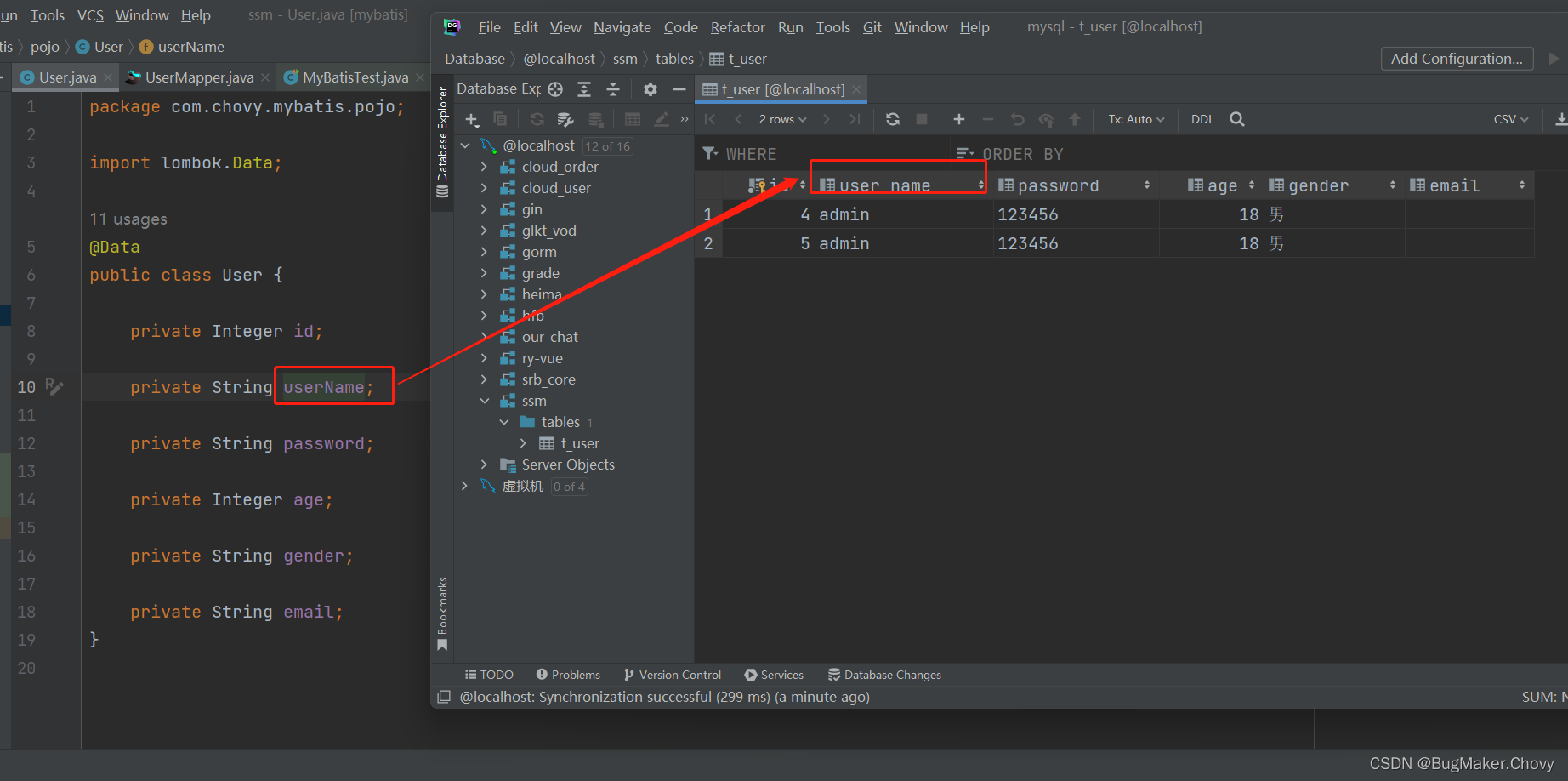
【MyBatis】自定义映射resultMap
8.1、resultMap处理字段和属性的映射关系 若字段名和实体类中的属性名不一致,则可以通过resultMap设置自定义映射 <!--resultMap:设置自定义映射属性:id:表示自定义映射的唯一标识type:查询的数据要映射的实体类的…...

mysql的锁和事务
mysql的锁 读写锁: 读锁是共享锁,多个用户在同一时刻可以读取同一资源,相互不受干扰写锁是排他锁,写锁会阻塞其他的写锁和读锁,这样可以确保在指定的时间内,只有一个用户可以写入 锁的颗粒度: …...

为什么B站中的弹幕可以不遮挡人物
上班逛B站时摸鱼时,看到了满屏的弹幕,而且还不挡脸,突然心血来潮来看看它是怎么实现的? 不难发现弹幕其实它就是有一个蒙版层div,遮挡在视频组件的上方,z-index层级设置的比较高(这里是11&…...
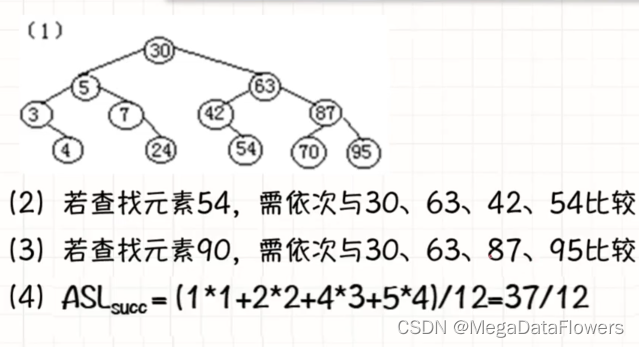
数据结构 第八章 查找(静态查找表)
集合 1、集合中的数据元素除了属于同一集合外,没有任何的逻辑关系 2、在集合中,每个数据元素都有一个区别于其他元素的唯一标识(键值或者关键字值) 3、集合的运算: 1 查找某一元素是否存在(内部查找、外部查找) 2 将集合中的元素按照它的唯一标识进行排序4、集合的…...
)
【Python基础】数据类型(元组、列表)
文章目录二. 数据类型2.1 元组 tuple2.1.1 定义特性2.1.2 拼接拷贝2.1.3 元组拆包2.1.4 元组方法 count2.2 列表 list2.2.1 基础定义2.2.2 增删操作2.2.3 连接联合2.2.4 其他常规操作2.2.5 列表推导式2.2.6 生成器表达式2.x 小结:何时使用元组或列表二. 数据类型 Py…...

你了解互联网APP搜索和推荐的背后逻辑么?
1.搜索和推荐无处不在我们习惯了百度、Google、360搜索的便捷,输入你想要搜索的关键词,立马呈现给你一批对应的结果,供你筛选。我们也经常上淘宝、京东、拼多多购物,输入想买的商品,瞬间列出一页一页的商品清单供我们选…...

Bug的级别,按照什么划分
Bug分类和定级一、bug的定义二、bug的类型三、bug的等级四、bug的优先级一、bug的定义一般是指不满足用户需求的则可以认为是bug,狭义指软件程序的漏洞或缺陷,广义指测试工程师或用户提出的软件可改进的细节、或与需求文档存在差异的功能实现等对应三个测…...
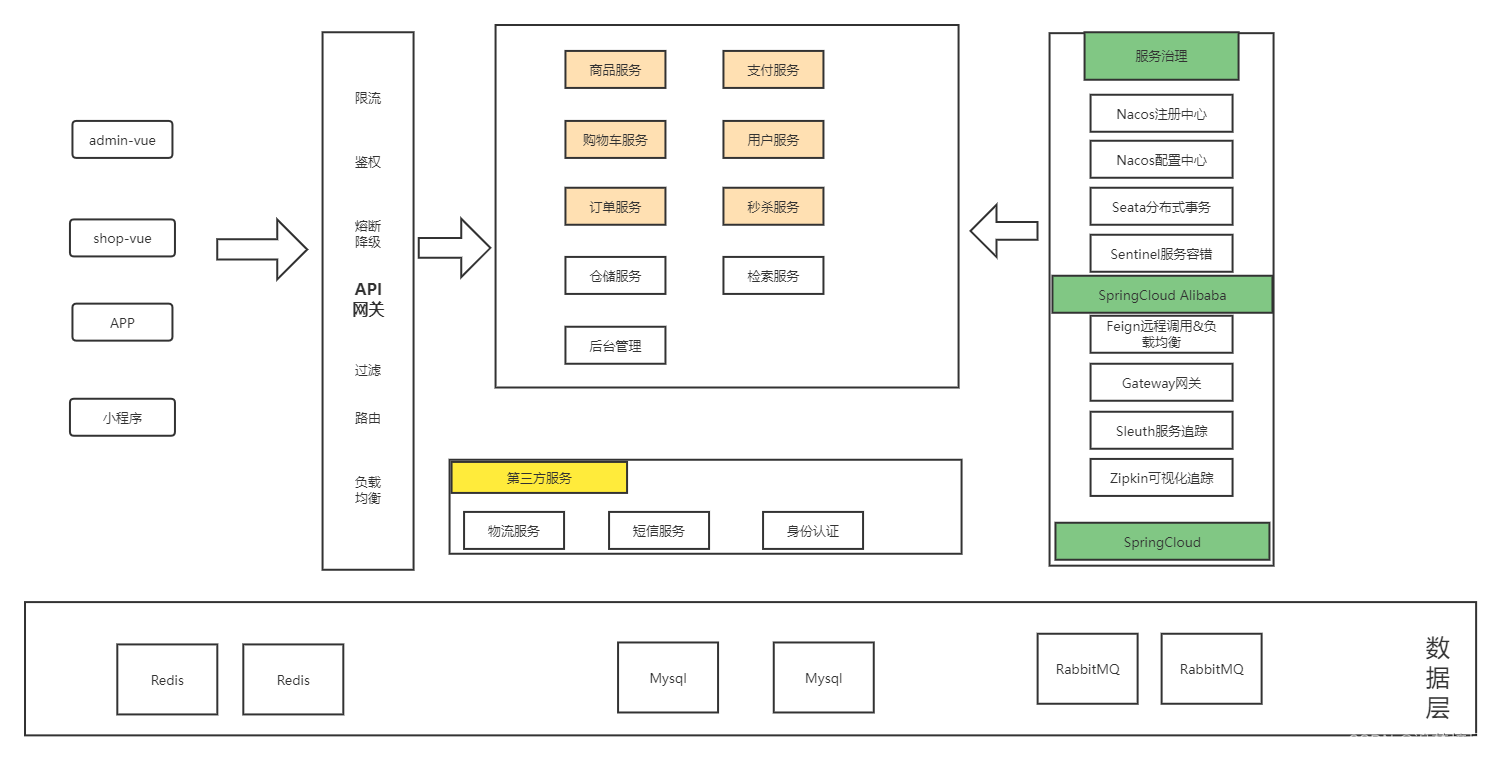
微服务项目简介
项目简介 项目模式 电商模式:市面上有5种常见的电商模式,B2B、B2C、 C2B、 C2C、O2O; 1、B2B模式 B2B (Business to Business),是指 商家与商家建立的商业关系。如:阿里巴巴 2、B2C 模式 B2C (Business to Consumer), 就是我们经常看到的供…...

SLAM中坐标轴旋转及ros的接口解释
读完几个loam算法,满篇的坐标轴旋转,还是手写的(作者,用eigen写不好嘛。。。),我滴天适应了好久…,今天就总结一下坐标轴旋转问题。 一、首先,我们看一下ros中关于欧拉角旋转的函数:setRPY、set…...
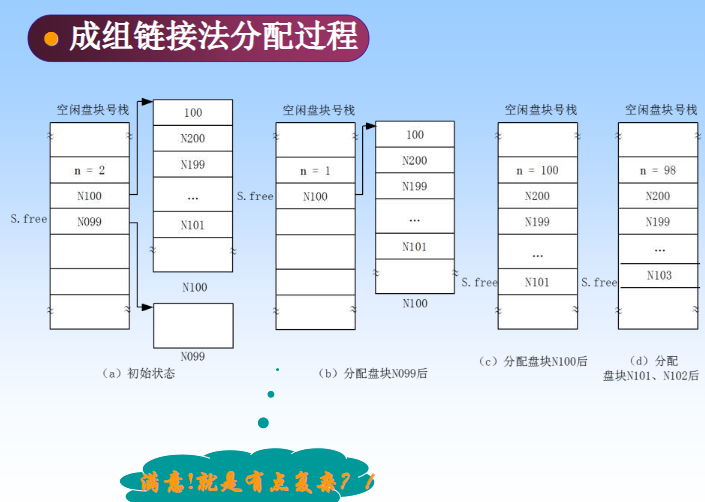
文件管理(9)
文件管理 0 引言 为什么要引入文件系统? 信息管理的需要:用户面前提供一种规格化的机制,方便用户对文件的存取、提高效率。操作系统本身需要–操作系统本身也不是常驻内存的,也有大量的信息需要存于外存。 1 文件定义 文件&a…...

PyTorch学习笔记:nn.TripletMarginLoss——三元组损失
PyTorch学习笔记:nn.TripletMarginLoss——三元组损失 torch.nn.TripletMarginLoss(margin1.0, p2.0, eps1e-06, swapFalse, size_averageNone, reduceNone, reductionmean)功能:创建一个三元组损失函数(triplet loss),用于衡量输入数据x1,x…...

冒泡排序详解
冒泡排序是初学C语言的噩梦,也是数据结构中排序的重要组成部分,本章内容我们一起探讨冒泡排序,从理论到代码实现,一步步深入了解冒泡排序。排序算法作为较简单的算法。它重复地走访过要排序的数列,一次比较两个元素&am…...
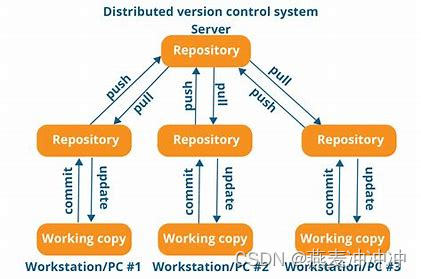
git极快上手指南超级精简版
注:本文参考https://www.liaoxuefeng.com/wiki/896043488029600 原文非常值得一读,作者学识渊博,补充了很多有意思的知识。我仅仅是拾人牙慧。 git是最先进的分布式版本控制系统。 版本控制系统——自动记录系统中文件的改动情况࿰…...

RCE漏洞小结
RCE漏洞简介 所谓RCE漏洞,即Remote Code/Command Execution,远程代码执行和远程命令执行漏洞。在很多Web应⽤中,开发⼈员会使⽤⼀些函数,这些函数以⼀些字符串作为输⼊,功能是将输⼊的字符串当作代码或者命令来进⾏执…...

杰理之spp收发数据处理没有找到的问题处理【篇】
原因:开启#define CONFIG_APP_BT_ENABLE 宏配置后,spp的收发处理的回调默认会被库里面接管,所以在app层是看不到的。...

无线音频桥接实战指南:让传统音响实现跨设备兼容的完整方案
无线音频桥接实战指南:让传统音响实现跨设备兼容的完整方案 【免费下载链接】AirConnect Use AirPlay to stream to UPnP/Sonos & Chromecast devices 项目地址: https://gitcode.com/gh_mirrors/ai/AirConnect 🎶 从"音响孤岛"到&…...

完整指南:在浏览器中创建惊艳WebGL流体模拟效果的5个关键技巧
完整指南:在浏览器中创建惊艳WebGL流体模拟效果的5个关键技巧 【免费下载链接】WebGL-Fluid-Simulation Play with fluids in your browser (works even on mobile) 项目地址: https://gitcode.com/gh_mirrors/web/WebGL-Fluid-Simulation 想要在浏览器中体验…...

基于StructBERT的代码相似性检测在编程教育中的应用
基于StructBERT的代码相似性检测在编程教育中的应用 1. 引言 如果你是编程课的老师,面对几十份甚至上百份学生提交的作业,最头疼的是什么?是逐行检查代码逻辑,还是判断学生之间是否存在抄袭?传统的代码相似性检查工具…...

吃透Redis核心数据结构:从原理到实战,避开90%的坑
Redis之所以能成为分布式系统的“性能神器”,核心在于其高效的内存数据结构设计。很多开发者对Redis的认知停留在“SET/GET缓存”,只会用最基础的字符串类型,却忽略了List、Hash、Set、ZSet等核心结构的强大能力,导致代码冗余、性…...

告别窗口拖拽:用Loop实现Mac高效分屏的5个核心技巧
告别窗口拖拽:用Loop实现Mac高效分屏的5个核心技巧 【免费下载链接】Loop MacOS窗口管理 项目地址: https://gitcode.com/GitHub_Trending/lo/Loop 每天在Mac上工作时,你是否经常被这些问题困扰:窗口太多找不到想要的那个?…...

VibeVoice多音色展示:从儿童到老人的自然过渡效果
VibeVoice多音色展示:从儿童到老人的自然过渡效果 1. 引言 你有没有想过,一段文字可以同时用儿童的天真嗓音、青年的清澈声线、中年的沉稳语调,以及老者的沧桑音色来演绎?这不是科幻电影中的场景,而是VibeVoice带来的…...

DeOldify处理超分辨率图像实战:应对大尺寸老照片的内存与计算挑战
DeOldify处理超分辨率图像实战:应对大尺寸老照片的内存与计算挑战 老照片修复,听起来是个挺有情怀的事儿。但当你真的拿到一张祖辈传下来的、扫描出来的超大尺寸老照片时,情怀可能瞬间就被现实浇灭了。动辄几千乘几千像素的扫描件࿰…...

【全场景优化】WaveTools鸣潮性能调校指南:从卡顿到流畅的完整解决方案
【全场景优化】WaveTools鸣潮性能调校指南:从卡顿到流畅的完整解决方案 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 问题定位:硬件与软件的兼容性挑战 当代游戏性能优化面临的核…...