四边形不等式优化DP
目录
- 四边形不等式内容
- [HNOI2008]玩具装箱
- 解析
- 代码实现
- 参考资料
四边形不等式内容
TODO
[HNOI2008]玩具装箱
解析
- 满足四边形不等式,决策具有单调性. 对于两个位置 i , j i, j i,j, 对应的最优决策点一定有 o p t [ i ] < = o p t [ j ] opt[i] <= opt[j] opt[i]<=opt[j]
- 代码实现
- 需要有一个队列,这里我们使用c++里的双端队列( d e q u e deque deque). 因为需要在队尾插入和弹出,队首弹出的操作.
- 初始化时,队列里只有一个元素, 比如本题中区间 [ 1 , n ] [1, n] [1,n], 决策点为 0 0 0. 这个对所有的位置 [ 1 , n ] [1, n] [1,n]都是合法的一个决策
- 每次插入决策 x x x的时候,从队尾开始判断,如果当前的节点的区间的开始位置决策 x x x更优,就弹出队尾,一直这么做.
- 接上一步, 于是就找到了一个节点(当前队尾): 对应的区间开始位置 x x x不优,结束位置 x x x更优。所以存在一个临界点,我们二分就是要找这么一个位置 p o s pos pos. [ p o s , n ] [pos, n] [pos,n]这部分 x x x更优,其他位置不变.
- 主函数循环部分,我们维持队列的区间都是还未确定最优决策的部分。
- 主函数循环部分,当循环到位置 i i i时候,由于我们已经考虑过小于 i i i的所有决策,因此对于位置 i i i,队首的决策就是位置 i i i的最优决策.
代码实现
#include <bits/stdc++.h>
using namespace std;#ifdef LOCAL
#include "debug.h"
#else
#define debug(...) 42
#endifconst int N = 5e4 + 5;typedef long long LL;int n, L;
// 原数组,以及前缀和
vector<LL> a, sum;
// dp[i]: 前i个玩具的最小费用. dp[i] = min(dp[j] + (s[i] - s[j] + i - j - 1 - L)^2), 0 <= j < i
vector<LL> dp;
// f[i]的最优决策点是谁, 也就是f[i]取得最小值的时候对应的上面的式子中的j. opt[i] = j.
vector<int> op;struct Node {int l, r, c;Node(int _l, int _r, int _c): l(_l), r(_r), c(_c){}
};// 存在插入队尾,弹出队首,弹出队尾三种操作,因此我们使用deque
deque<Node> q;// dp方程: f[j] = f[i] + (x - L) ^ 2
inline LL val(int j, int i) {LL s = sum[i] - sum[j] + i - j - 1 - L;return dp[j] + 1LL * s * s;
}// 用决策x更新
void insert(int x) {// pos表示能更新的那一段的开始位置, 结束位置一定是nint pos = n + 1; // 临界点// 找到x能更新的队列,一定是末尾的一段// 队列里队尾的元素. 看决策x是否是更优的决策. 满足'<='意味着x更优while (q.size() && val(x, q.back().l) <= val(q.back().c, q.back().l)) {pos = q.back().l; // 更新pos: [q,back().l, q.back().r] 这一段肯定x更优q.pop_back();}// 找到了这个区间. 这个区间的右边界x更优,左边界x不优秀. 我们二分寻找临界点在哪里if (q.size() && val(x, q.back().r) <= val(q.back().c, q.back().r)) {int l = q.back().l, r = q.back().r;while (l < r) {int mid = l + r >> 1;if (val(x, mid) <= val(q.back().c, mid)) r = mid; // 对于mid这个点, x的决策更优, 临界点在左边 -> [l, mid]else l = mid + 1; // mid这个点,x不优. 那么临界点在右半部分 -> [mid + 1, r]}// 结束循环时,r是使x成为最优决策的一段的起始位置pos = r;q.back().r = r - 1;}// 说明存在某些位置x的决策比当前队列的优. 也就是进入过上面的代码.if (pos != n + 1) q.push_back(Node(pos, n, x));
}int main() {cin >> n >> L;a = sum = dp = vector<LL>(n + 1, 0);op = vector<int>(n + 1, 0);for (int i = 1; i <= n; i++) cin >> a[i], sum[i] = sum[i - 1] + a[i];q.push_back(Node(1, n, 0)); // 一开始队列只有一个元素,表示[1, n]所有的最优决策点都是0for (int i = 1; i <= n; i++) {// 队头的决策点就是当前i的最优决策int opt = q.front().c;dp[i] = val(opt, i);op[i] = opt;// 弹出已经无用的决策if (q.front().r == i) q.pop_front();q.front().l = i + 1;// 插入当前决策,并用决策i去更新 [i + 1, n]的最优决策insert(i);}cout << dp[n] << endl;return 0;
}
参考资料
- OIWIKI
- 洛谷日报
相关文章:

四边形不等式优化DP
目录 四边形不等式内容[HNOI2008]玩具装箱解析代码实现 参考资料 四边形不等式内容 TODO [HNOI2008]玩具装箱 解析 满足四边形不等式,决策具有单调性. 对于两个位置 i , j i, j i,j, 对应的最优决策点一定有 o p t [ i ] < o p t [ j ] opt[i] < opt[j]…...

Gin 学习笔记01-数据返回
Gin 数据返回 1、返回 string 和 json2、返回 xml 和 ymal3、返回html4、重定向 1、返回 string 和 json c.String()c.JSON() package mainimport ("github.com/gin-gonic/gin""net/http" )func getJSON(c *gin.Context) {//c.String(http.StatusOK, &qu…...
【AI考证笔记】NO.1人工智能的基础概念
目录 一、什么是智能 1.什么是智能 2.智能的种类 二、什么是人工智能 1.人工智能之父——图灵 2.人工智能的定义 三、人工智能的发展阶段 四、哪些工作要被淘汰掉? 以下部分内容来自于百度智能云人才认证培训讲义,腾讯等也有人工智能类似的讲义&…...

【Exception】npm ERR! code UNABLE_TO_GET_ISSUER_CERT_LOCALLY
Talk is cheap, show me the code. 环境 | Environment kversionOSwindows 11nodev18.14.2npm9.5.0 报错日志 | Error log >npm create vitelatest Need to install the following packages:create-vite5.0.0 Ok to proceed? (y) y npm ERR! code UNABLE_TO_GET_ISSUER_…...

持续集成交付CICD:GitLabCI 通过trigger触发流水线
目录 一、理论 1.GitLabCI 二、实验 1.搭建共享库项目 2.GitLabCI 通过trigger触发流水线 三、问题 1.项目app02未触发项目app01 2.GitLab 报502网关错误 一、理论 1.GitLabCI (1) 概念 GitLab CI(Continuous Integration)是一种持续集成工具…...
和wait()方法的区别)
Java 多线程中的sleep()和wait()方法的区别
Java 多线程中的sleep()和wait()方法的区别 1、相同点 sleep()和wait()都可以暂停线程的执行。 2、不同点 所在类不同 sleep()是Thread类的静态方法。 wait()是Object类的方法。 锁释放不同 sleep()是不释放锁的。 wait()是释放锁的。 用途不同 sleep()常用于一定时间内暂停…...

车载以太网-数据链路层-VLAN
文章目录 车载以太网VLAN(Vehicle Ethernet VLAN)车载以太网VLAN帧格式VLAN帧报文VLAN帧报文示例车载以太网VLAN(Vehicle Ethernet VLAN) 车载以太网VLAN(Vehicle Ethernet VLAN)是一种在车辆网络中使用的虚拟局域网技术。它允许在车载以太网网络中创建多个逻辑网络,从…...
【Vue】filter的用法
上一篇: vue的指令 https://blog.csdn.net/m0_67930426/article/details/134599378?spm1001.2014.3001.5502 本篇所使用指令 v-for v-on v-html <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"&…...

python web项目导包规范
python web项目导包规范 python 内置的模块通过第三方库安装的模块框架自身提供的模块用户自己定义的模块 如: from __future__ import absolute_import, unicode_literalsfrom debug_toolbar.panels import Panelfrom django.utils.translation import ugettext_…...

AtCoder Beginner Contest 330 题解
目录 A - Counting PassesB - Minimize Abs 1C - Minimize Abs 2D - Counting LsE - Mex and Update A - Counting Passes 原题链接 题目描述 给定N个数和一个整数L,输出大于等于L的数的个数。 public static void solve() throws IOException{int n readInt(), m…...

论文速读《DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection》
概括主要内容 文章《DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection》提出了两种创新技术,以改善多模态3D检测模型的性能,通过更有效地融合相机和激光雷达传感器数据来提高对象检测的准确性,尤其是在行人检测方面…...
)
关于前端处理后端轮询的操作 (总结)
使用场景:前端首次发起请求获取数据,若失败则每隔1s发起一次知道成功获取数据为止解决方案: 使用轮询操作,涉及定时器的使用和关闭 (使用vue2代码为例) data() {return {pollingResult_en: null, // 处理轮询结果bizI…...
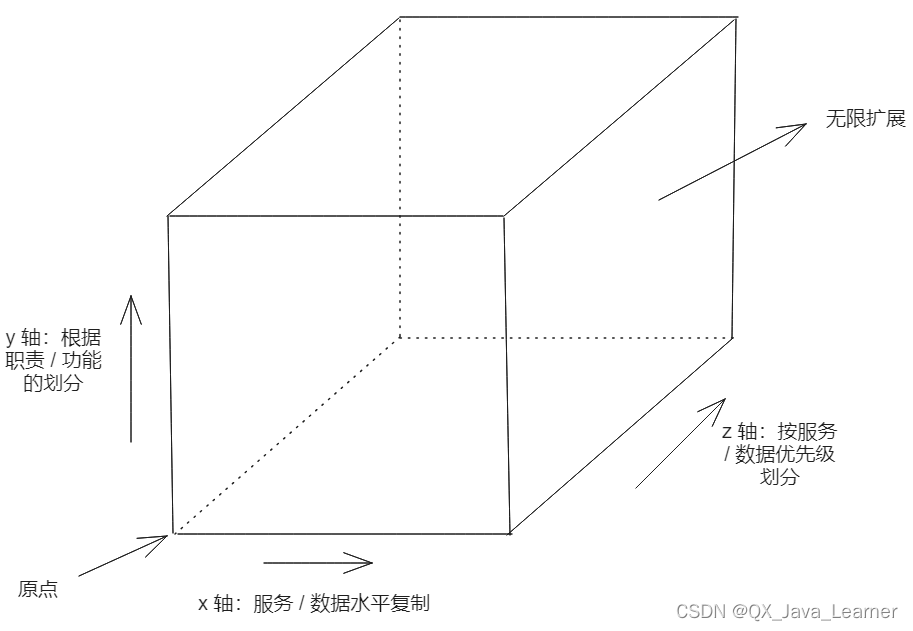
【SpringCloud】设计原则之单一职责与服务拆分
一、设计原则之单一职责 设计原则很重要的一点就是简单,单一职责也就是所谓的专人干专事 一个单元(一个类、函数或微服务)应该有且只有一个职责 无论如何,一个微服务不应该包含多于一个的职责 职责单一的后果之一就是职责单…...

UDP分片和丢包与TCP效果对比
UDP 分片 与 丢包,UDP 真的比 TCP 高效吗? UDP(用户数据报协议)和TCP(传输控制协议)在很多方面都有显著的区别。总体来说,TCP更适合需要可靠传输的应用,例如网页浏览、电子邮件等&a…...
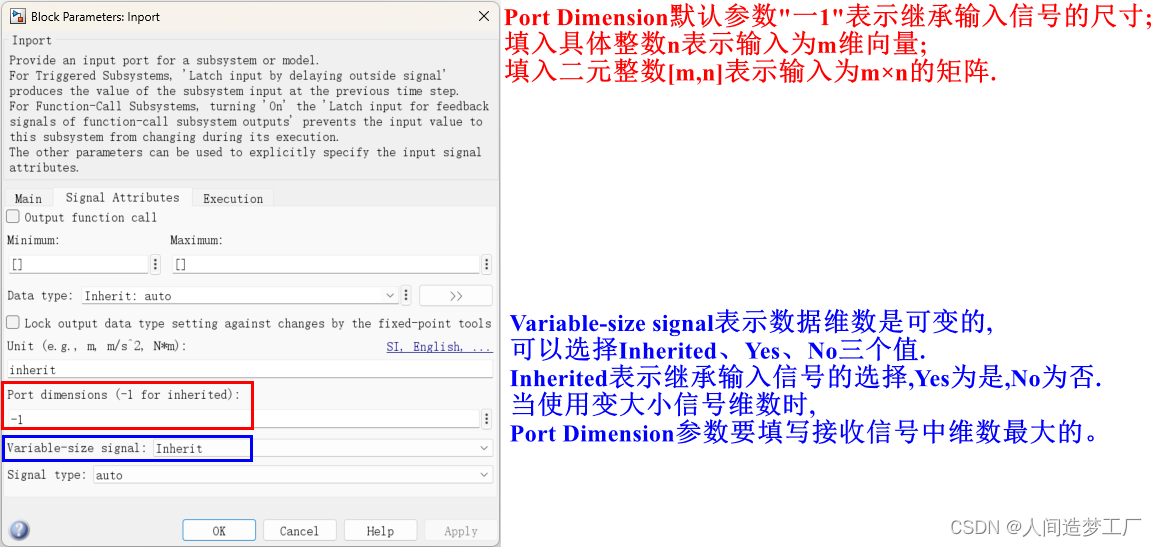
Inport 模块
文章目录 Interpolate datainport 模块存在于模型最顶层Port Dimension 和 Variable-size signal Interpolate data Interpolate data:当将 Workspace 的数据导人模型时, 对没有对应数据点的采样时刻进行线性插值的开关选项。 inport 模块存在于模型最顶层 inpo…...
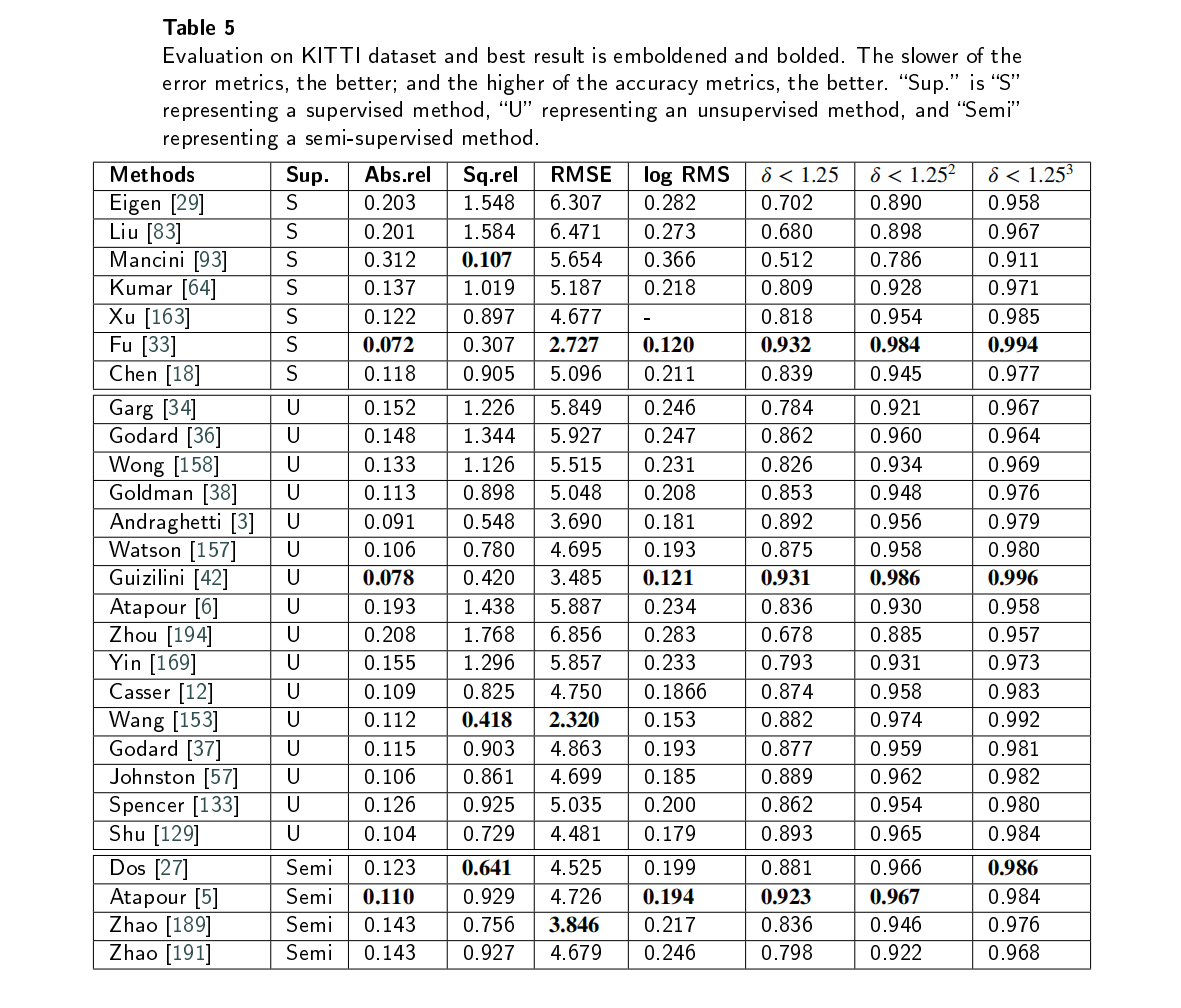
Deep Learning for Monocular Depth Estimation: A Review.基于深度学习的深度估计
传统的深度估计方法通常是使用双目相机,计算两个2D图像的视差,然后通过立体匹配和三角剖分得到深度图。然而,双目深度估计方法至少需要两个固定的摄像机,当场景的纹理较少或者没有纹理的时候,很难从图像中捕捉足够的特…...
)
点云从入门到精通技术详解100篇-基于深度学习的稀疏点云障碍物检测(续)
目录 3.1 连续帧点云空间特征融合 3.1.1 点云预处理 3.1.2 地面分割 3.1.3 自适应点云聚类...
使用VSCode+PlatformIO搭建ESP32开发环境
Arduino IDE本来就是为创客们开发的,虽然没代码提示功能,文件的关系也不清晰,函数不能跳转,头文件也打不开,但人家的初衷就是为了简单而生的;但还是有一些同学喜欢高级点的IDE,也没问题…...

使用flask返回json格式的数据
Flask Flask是一个使用Python编写的轻量级Web框架,它的设计理念是保持简单、灵活和易扩展。它的核心是Werkzeug和Jinja2,并且它本身只提供了非常基础的Web框架功能,例如路由和请求处理等。 使用Flask可以快速创建一个Web应用程序,…...

如何排查java 内存溢出OutOfMemoryError?
当使用Spring Boot进行文件上传时,文件会被读取到内存中进行处理。如果上传的文件较大,会占用大量的内存空间,从而导致内存溢出(OutOfMemory)问题。以下是一些建议的排查方案: 调整 JVM 内存设置ÿ…...

时间继电器测试校验仪精准高效的检测解决方案
时间继电器是工业控制、电力调度、轨道交通等领域的核心时序元件,其动作精度、可靠性直接决定整个系统的运行安全与效率。西安同步电子研发的SYN5606型时间继电器测试仪,以“精准适配、高效便捷、稳定可靠”为核心,适配各类时间继电器全生命周…...
)
告别Overleaf!在VS Code里用LaTeX Workshop写论文的保姆级配置(含环境变量、PDF同步、Snippets)
告别Overleaf!在VS Code里用LaTeX Workshop写论文的保姆级配置 如果你正在写学术论文或技术报告,大概率已经受够了在线LaTeX编辑器的种种限制——网络延迟导致的卡顿、功能阉割带来的不便,或是隐私泄露的潜在风险。今天,我们将彻底…...
遇见工业缺陷检测,效果提升了多少?)
PatchCore算法升级手记:当ViT(CaiT)遇见工业缺陷检测,效果提升了多少?
PatchCore算法升级手记:当ViT遇见工业缺陷检测 在工业质检领域,微小的表面缺陷往往隐藏在复杂的纹理背景中,传统CNN架构的局部感受野限制使其难以捕捉全局异常模式。最近半年,我们团队针对PatchCore这一经典无监督异常检测框架进行…...

HTML怎么实现成就徽章放大预览_HTML悬停查看大图结构【教程】
用 transform: scale() 实现 hover 图片放大最省事,但需加 overflow: hidden 防溢出、transition 保证平滑、避免 position: absolute 破坏布局,并通过 data-large-src 或 background-image 解决高清图加载,同时适配移动端 touch 和 stacking…...
Pixel Aurora Engine 构建数字人素材库:快速生成多样化人物肖像与表情
Pixel Aurora Engine 构建数字人素材库:快速生成多样化人物肖像与表情 1. 数字人素材生产的行业痛点 在虚拟主播、游戏NPC和在线教育数字人项目中,高质量的人物素材需求正呈现爆发式增长。传统制作方式面临着三大核心挑战: 成本高昂&#…...
)
保姆级教程:用OpenCV搞定鱼眼双目相机的标定与测距(附完整C++代码)
鱼眼双目视觉实战:从标定到三维测距的全流程解析 鱼眼镜头因其超广视角特性,在机器人导航、VR全景拍摄等领域应用广泛。但大畸变特性也给双目视觉系统带来额外挑战——传统标定方法直接套用往往导致测距误差剧增。本文将用OpenCV的fisheye模块࿰…...

C++ string操作指南:从入门到精通
一、为什么要用 string?之前学的 char[] 缺点:必须手动处理 \0,容易乱码不能直接用 赋值、 拼接长度受限,容易越界函数少,操作麻烦string 优点:是 C 标准类,安全方便可以直接 、、 比较自动管理…...
)
你的ESP32项目需要BGM?手把手教你用无源蜂鸣器做个迷你音乐盒(附《成都》《后来》等流行歌曲库)
用ESP32和无源蜂鸣器打造你的专属音乐盒:从《成都》到《后来》的完整实现指南 你是否想过给自己的智能家居项目添加一点音乐氛围?或者为机器人制作一个会唱歌的小彩蛋?ESP32开发板搭配无源蜂鸣器,就能实现这个有趣的想法。不同于简…...
)
全球首份AGI跨国治理白皮书深度拆解(2026奇点大会闭门纪要首次公开)
第一章:全球首份AGI跨国治理白皮书的战略定位与历史坐标 2026奇点智能技术大会(https://ml-summit.org) 这份白皮书并非技术路线图的延伸,而是人类在通用人工智能临界点前主动构筑的第一道制度性防火墙。它诞生于2025年联合国人工智能治理特别会议框架…...

Claude Opus 4.7:一个有诚意但不完美的升级
视觉能力提升3倍、编程能力碾压GPT-5.4,却被用户吐槽"更费token、爱道歉、会撒谎"——Opus 4.7的真实面貌,比跑分更复杂。 深夜收到的推送 4月17日深夜,我收到这么一条消息: “Claude Opus 4.7已全面可用,编…...