从零开始的机械臂yolov5抓取gazebo仿真(环境搭建篇下)
sunday功能包使用介绍以及开源
sunday我给自己机械臂的命名,原型是innfos的gluon机械臂。通过sw模型文件转urdf。Sunday项目主要由六个功能包sunday_description、sunday_gazebo、sunday_moveit_config、yolov5_ros、vacuum_plugin、realsense_ros_gazebo组成,下面我将介绍这六个功能包。
个人环境
首先介绍个人使用环境,博主使用的是Ubuntu18.04+gtx1660ti显卡+ros_melodic+cuda10.2+pytorch1.8+yolov5-6.1。环境配置的教程详见上一篇博客:
https://blog.csdn.net/qq_48427527/article/details/129201676?spm=1001.2014.3001.5502
sunday_description
sunday_description是由sw插件导出的功能包,我主要对sunday_description/urdf中的urdf文件进行修改,并配置xacro文件。
sunday_description/launch/sunday_rviz.launch
文件用于观察我所配置的xacro文件的模型状态。
sunday_moveit_config
基于sunday_description/urdf/sunday.xacro对moveit进行配置修改方面还是参考古月的课程进行的修改。
修改过的文件:
sunday_moveit_config/config/controllers_gazebo.yamlsunday_moveit_config/launch/moveit_rviz.launchsunday_moveit_config/launch/moveit_planning_execution.launch
sunday_gazebo
该功能包主要用于配置机械臂操作的gazebo仿真环境,具体配置也是参考古月的课程,几个launch文件分别用于发布机械臂关节的状态以及与moveit做对接。
sunday_gazebo/launch/sunday_bringup_moveit.launch
该launch文件里面包含了所有节点,包括yolov5节点。如果你还未配置好yolov5环境,也可以使用以下不包含yolov5的launch文件打开gazebo环境。
sunday_gazebo/launch/sunday_bringup_moveit_origin.launch
yolov5_ros
该功能包是我在csdn上边找到的,封装了yolov5,能以launch文件启动,并发布话题,个人感觉还不错。地址:
YoloV5 的ros功能包
git clone https://github.com/qq44642754a/Yolov5_ros.git
具体使用过程就是将训练好的权重放置进功能包中对应launch文件的路径下边,在launch文件中修改话题名称以及其它参数即可。
vacuum_plugin
vacuum_plugin是一个吸盘的插件,在urdf中插入该插件即可在gazebo中实现吸盘的功能。
git clone https://github.com/tatsuya-s/gazebo_ros_vacuum_gripper_debugger
在sunday_description/urdf/sunday.xacro第490行添加插件
<!-- vacuum_gripper plugin --><gazebo><plugin name="gazebo_ros_vacuum_gripper" filename="libvacuum_plugin.so"><robotNamespace>/sunday/vacuum_gripper</robotNamespace><bodyName>link_6</bodyName><topicName>grasping</topicName><maxDistance>0.05</maxDistance><minDistance>0.03</minDistance></plugin>
</gazebo>
realsense_ros_gazebo
realsense_ros_gazebo功能包是realsense的gazebo功能包,其仿真效果与实物相同,且其中包含多款realsense型号的模型文件,其中便包含本项目中使用的realsenseD435i摄像头,可以将原urdf中的摄像头删除,调用该功能包的模型进行替换。
git clone https://github.com/nilseuropa/realsense_ros_gazebo.git
在sunday_description/urdf/sunday.xacro第454行添加代码
<xacro:include filename="$(find realsense_ros_gazebo)/xacro/depthcam.xacro"/>
<xacro:realsense_d435 sensor_name="camera" parent_link="link_5" rate="30"><origin xyz="-0.00068847 -0.06 -0.13" rpy="-3.14 0 -1.5708"/>
</xacro:realsense_d435>
gripper_model
gripper_model并不是一个功能包,这个包里有四个模型文件,对应视频中的三个多边形体以及,喂食过程中的人物张嘴闭嘴展板。模型文件的制作以及贴图的教程可以看我之前写的博客。博客地址:
https://blog.csdn.net/qq_48427527/article/details/124477608?spm=1001.2014.3001.5502
将四个模型拷贝放置到.gazebo/models路径,注意不能将整个包拷贝,仅将四个模型文件拷贝即可。
使用教程
现将几个模型文件gripper_model中的几个模型文件放到.gazebo/models路径中
将sunday.zip解压置于xx_ws/src路径下
cd xx_wscatkin_makesource devel/setup.bashconda activate 之前创建的虚拟环境roslaunch sunday_gazebo sunday_bringup_moveit.launch(该launch包含yolov5节点,因此需要在conda环境中运行)新开一个终端roscd sunday_gazebo/scriptspython grasp&feed.py(该脚本无需进入conda环境中运行)
在终端中输入想要拾取物体的名称,从而实现物体的拾取以及喂食/视频第一部分pick&placeconda activate 之前创建的虚拟环境
roslaunch sunday_gazebo sunday_bringup_moveit.launch
将gazebo中的展板挪远一点新开终端
roscd sunday_gazebo/scripts
python grasp.py
在终端中输入想要拾取物体的名称,从而实现物体的拾取
由于用于训练的多边形样本照片过少,如果出现展板挡住多边形模型出现阴影从而无法准确识别的情况,可以拖动或者旋转多边形模型通过调整位姿实现物体识别。
开源地址
github无法上传开源的三个功能包,因此我将所有功能包都打包放在百度网盘里面。
网盘链接:
链接: https://pan.baidu.com/s/1thKsIPsyBFtpiPuAC-VgeA 密码: mogp
–来自百度网盘超级会员V3的分享
github:https://github.com/Lord-Z/sunday
资料
1.YoloV5 的ros功能包
2.realsense_ros_gazebo
3.vacuum_plugin
相关文章:
)
从零开始的机械臂yolov5抓取gazebo仿真(环境搭建篇下)
sunday功能包使用介绍以及开源 sunday我给自己机械臂的命名,原型是innfos的gluon机械臂。通过sw模型文件转urdf。Sunday项目主要由六个功能包sunday_description、sunday_gazebo、sunday_moveit_config、yolov5_ros、vacuum_plugin、realsense_ros_gazebo组成&…...

GCC编译器 MinGW的下载安装使用教程
哎 总所周知 gcc可以用来编译C 和C。在linux广泛应用,那么window怎么使用gcc呢。就要用到gcc的window工具----MInGW,安装好之后,直接可以在windows的dos界面编译。下面讲解安装使用过程。1.官网下载MinGW - Minimalist GNU for Windows downl…...

【项目实战】SpringMVC配置全局属性,是实现WebMvcConfigurer接口,还是直接继承WebMvcConfigurationSupport类?
一、说明 官方推荐以下两种方式来配置全局的SpringMVC的相关属性 方式一:实现WebMvcConfigurer接口(推荐)方式二:直接继承WebMvcConfigurationSupport类。介绍一下两者区别吧。 二、 WebMvcConfigurer介绍 WebMvcConfigurer是一个接口,用于配置全局的SpringMVC的相关属…...

房产营销、地产中介如何高效低成本获客?
数字化对企业而言,机遇和挑战并存。房产企业可借助数字化加强日益扩大的业务规模和业务领域管理,以提升管理效率,降低管理难度;基于数字化技术加强客户的服务体验,进而收集多业态客户和场景数据,拓展创新业…...

Kotlin-作用域函数
在对象的上下文中执行代码块。当您在提供lambda表达式的对象上调用这样的函数时,它会形成一个临时作用域。在此范围内,可以不带名称地访问对象。这样的函数称为作用域函数。 let run with apply also 作用域函数不会引入任何新的技术功能,但它…...

QNX7.1 交叉编译开源库
1.下载QNX7.1 SDK并解压 ITL:~/work/tiqnx710$ ls -l 总用量 16 drwxrwxr-x 4 xxx4096 1月 28 13:38 host -rwxrwxr-x 1 xxx 972 1月 28 13:38 qnxsdp-env.bat -rwxrwxr-x 1 xxx 1676 1月 28 13:38 qnxsdp-env.sh drwxrwxr-x 3 xxx 4096 1月 28 13:38 target xxxITL:~/work/ti…...

论文投稿指南——中文核心期刊推荐(外国语言)
【前言】 🚀 想发论文怎么办?手把手教你论文如何投稿!那么,首先要搞懂投稿目标——论文期刊 🎄 在期刊论文的分布中,存在一种普遍现象:即对于某一特定的学科或专业来说,少数期刊所含…...

Fabric系列 - 链码-内部链码的特性
(1)Fabric repo下的案例 Chaincode(1.4的目录结构) fabric/examples/chaincode/go ├── example02 #一个简单的转账合约 ├── eventsender #发送事件通知 ├── passthru #调用其他链码(或者其他channel的链码)example02 (转账) 一个简单的转账合约。该链码简单实…...
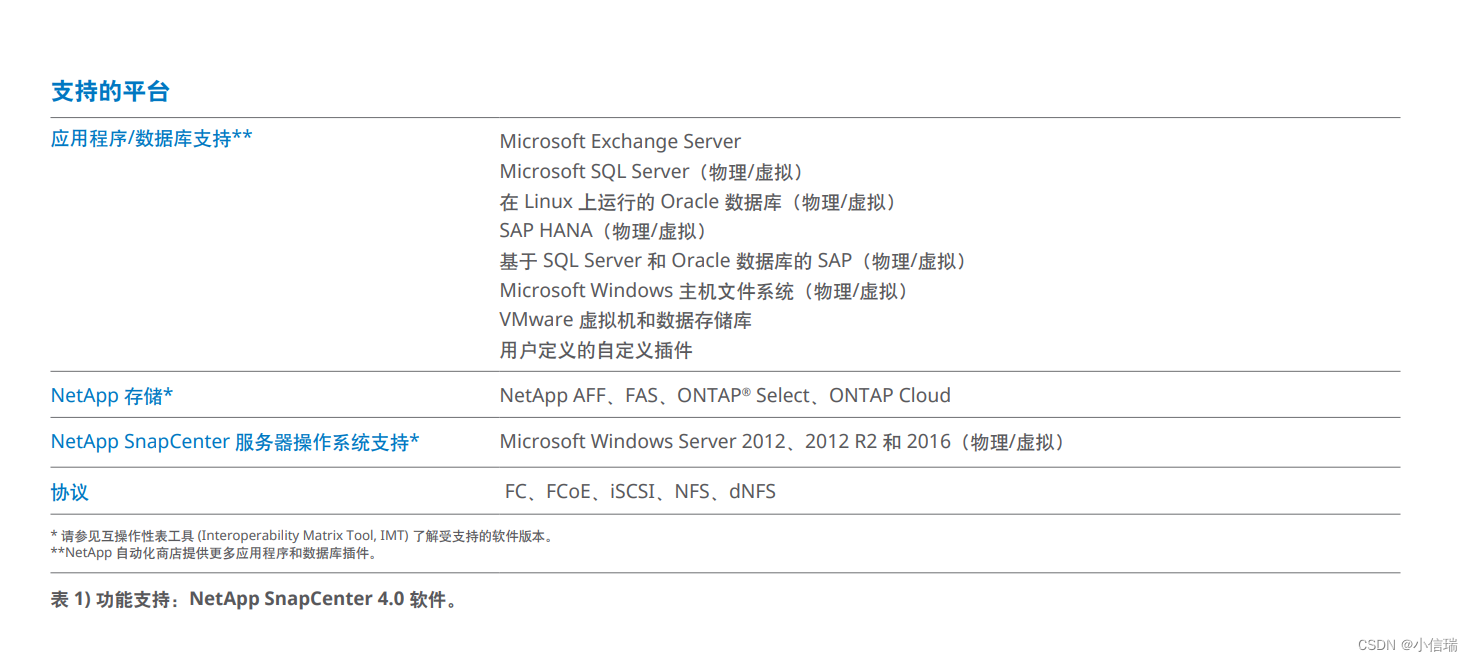
NetApp SnapCenter 备份管理 ——借助应用程序一致的数据备份管理,简化混合云操作
NetApp SnapCenter 简单、可扩展、赋权:跨 Data Fabric 的企业级数据保护和克隆管理 主要优势 • 利用与应用程序集成的工作流和预定义策略简化备份、恢复和克隆管理。 • 借助基于存储的数据管理功能提高性能和可用性,并缩短测试和开发用时。 • 提供基…...
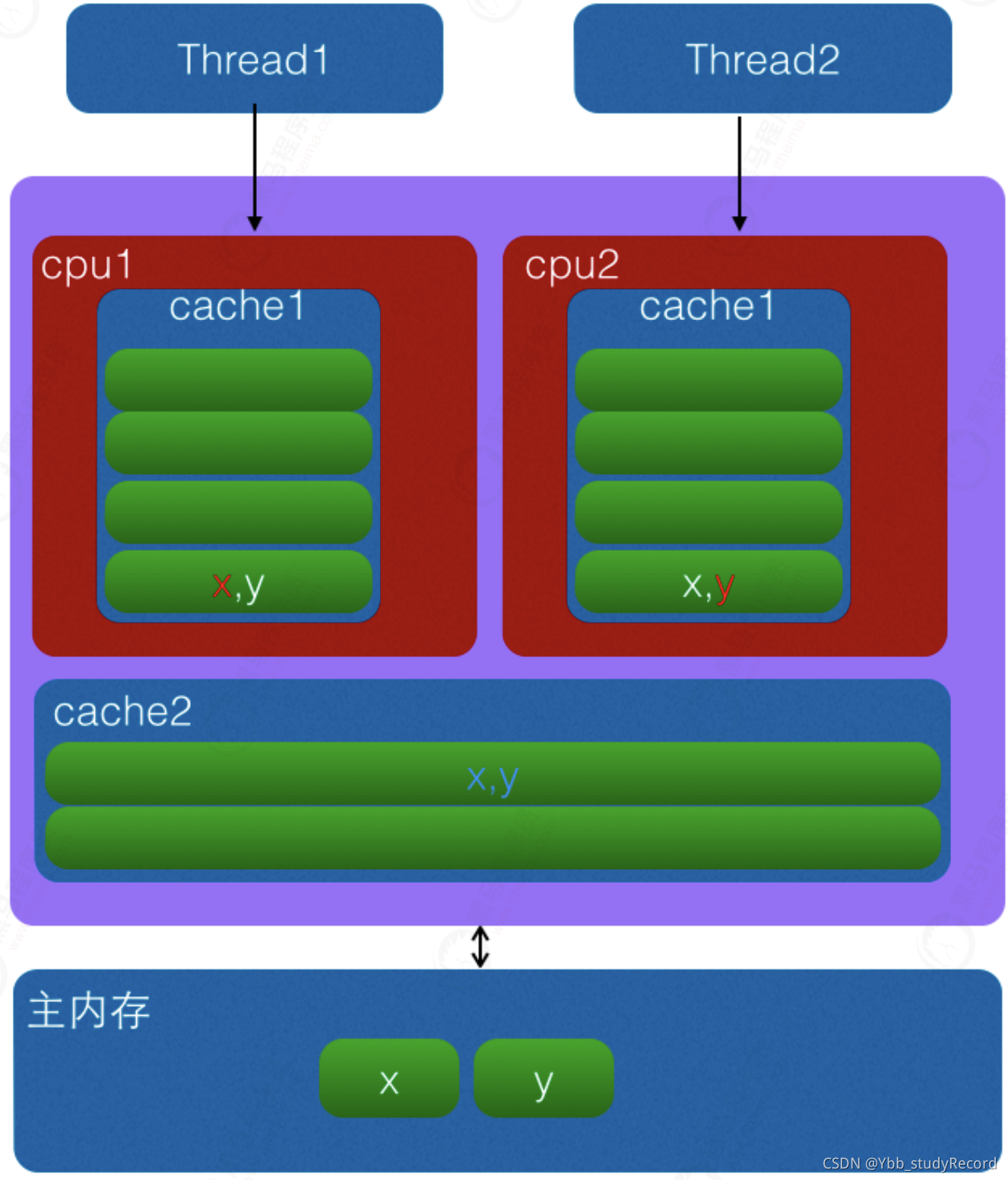
Java内置队列和高性能队列Disruptor
一、队列简介 队列是一种特殊的线性表,遵循先入先出、后入后出(FIFO)的基本原则,一般来说,它只允许在表的前端进行删除操作,而在表的后端进行插入操作,但是java的某些队列运行在任何地方插入删…...
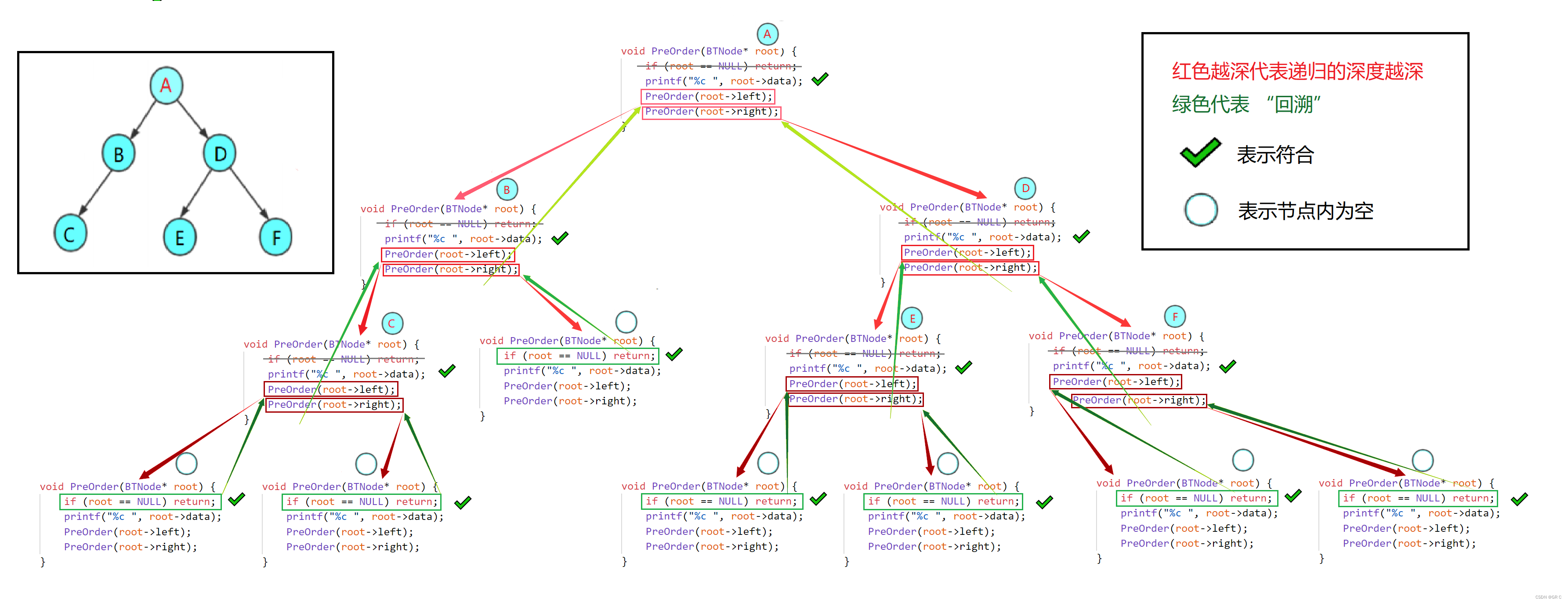
比特数据结构与算法(第四章_下)二叉树的遍历
本章将会详细讲解二叉树遍历的四种方式,分别为前序遍历、中序遍历、后续遍历和层序遍历。在学习遍历之前,会先带大家回顾一下二叉树的基本概念。学习二叉树的基本操作前,需要先创建一颗二叉树,然后才能学习其相关的基本操作&#…...

chatGPT是什么
2022年11月,人工智能公司OpenAI推出了一款聊天机器人:ChatGPT。它能够通过学习和理解人类语言来进行对话,还能与聊天对象进行有逻辑的互动。除了聊天,ChatGPT还能够根据聊天对象提出的要求,进行文字翻译、文案撰写、代…...
jenkins漏洞集合
目录 CVE-2015-8103 反序列化远程代码执行 CVE-2016-0788 Jenkins CI和LTS 远程代码执行漏洞 CVE-2016-0792 低权限用户命令执行 CVE-2016-9299 代码执行 CVE-2017-1000353 Jenkins-CI 远程代码执行 CVE-2018-1000110 用户枚举 CVE-2018-1000861 远程命令执行 CVE-2018…...

用canvas画一个炫酷的粒子动画倒计时
前言 😆 这是一篇踩在活动尾声的文章,主要是之前在摸鱼社群里有人发了个粒子动画的特效视频,想着研究研究写一篇文章出来看看,结果这一下子就研究了半个多月。 😂 下面就把研究成果通过文字的形式展现出来吧…...

Java技术学习——Maven相关知识
一、什么是Maven? Maven是Apache软件基金会组织维护的一款专门为Java项目提供构建和依赖管理支持的工具。 1.1 构建 构建过程包含的主要环节如下: 清理:删除上一次构建的结果,为下一次构建做好准备编译:Java源程序…...
C++ 认识和了解C++
1.在使用C语言写代码的时候开头要用到的是: #include<iostream> using namespace std;不可以写成这样: #include iostream.h(1)iostream是输入输出流类, istream输入流类 cin >> ostream输出流类 cout &…...

u盘误删的文件怎么找回
u盘误删的文件怎么找回?u盘的特点之一就是极其便携,可以容纳各种格式的数据和文件,需要时可以直接使用。每次使用都会或多或少的存放一些文件,但有使用就会有删除,为了不影响使用性,清理存储空间是必要的。清理中如果…...
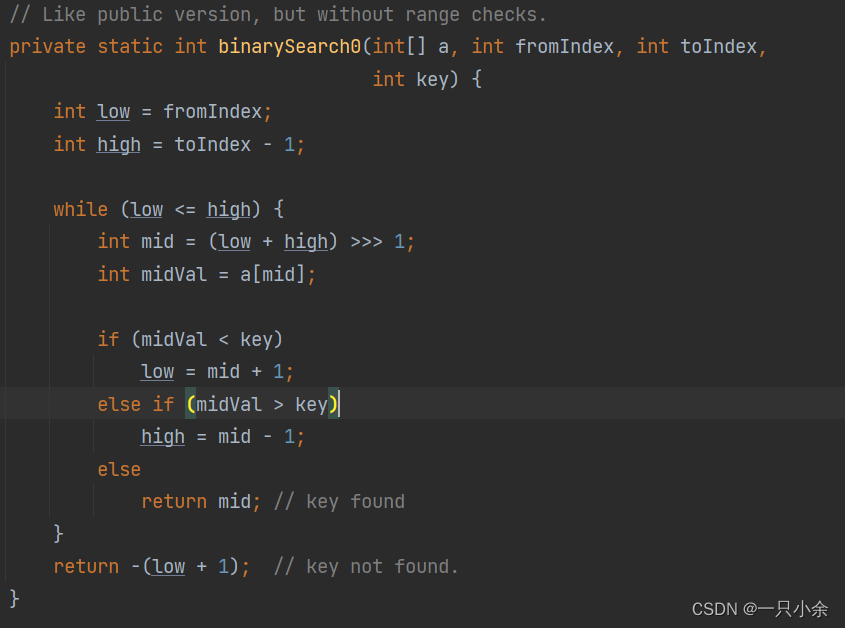
二分查找由浅入深--算法--java
二分查找写在开头算法前提:算法逻辑算法实现简单实现leftright可能超过int表示的最大限度代码分析和变换更多需求:求索引最小的值java二分API应用基础题思考难度方法写在开头 二分查找应该是算比较简单的这种算法了,我本以为还可以。但有时候…...
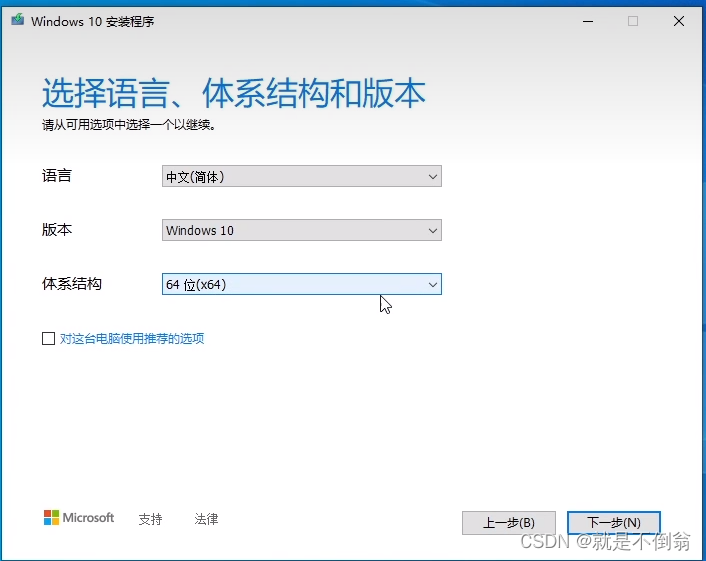
【学习】笔记本电脑重新安装系统win10
安装系统有很多方法: 软件安装制作启动u盘本文使用的方法就是启动盘安装: 1.首先下载iso镜像文件: msdn我告诉你:MSDN, 我告诉你 - 做一个安静的工具站 (itellyou.cn) 2.下载启动盘制作工具: 制作启动盘rufus:Rufus - 轻松创建 USB 启动盘 3.官网下载: https://do…...
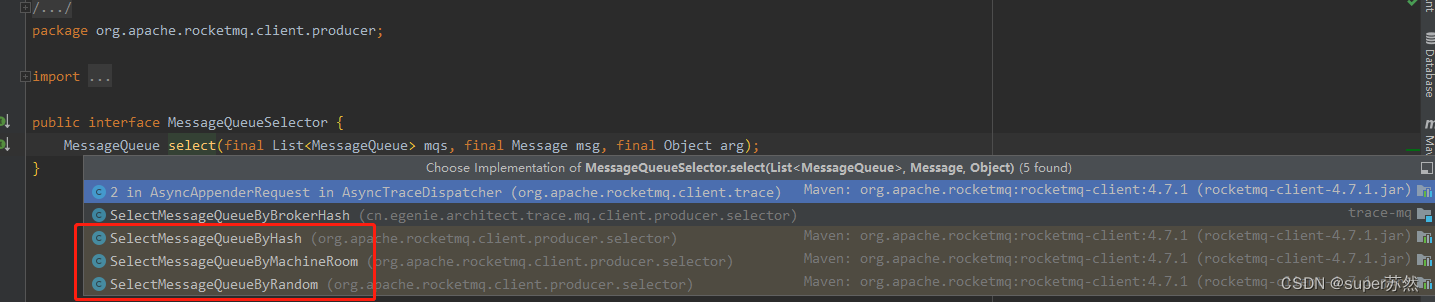
RocketMQ的一些使用理解
1.RocketMQ的生产者生产负载策略(3种) (1)SelectMessageQueueByHash (一致性hash) (2)SelectMessageQueueByMachineRoom (机器随机) (3)SelectMessageQueueByRandom (随机) 第1种一…...

基于FreeRTOS与LVGL的智能手表开源系统InfiniTime开发指南
1. 项目概述:为你的智能手表注入灵魂 如果你手上有一块PineTime或者类似的低功耗智能手表,并且对官方固件那有限的功能感到意犹未尽,那么“InfiniTime”这个名字你应该不会陌生。它不是一个简单的应用商店,而是一个为这类开源硬件…...
)
告别X11!在Ubuntu 22.04上从源码编译Wayland+Weston桌面(保姆级避坑指南)
从X11到Wayland:Ubuntu 22.04源码编译Weston全流程实战 如果你已经受够了X11的老旧架构和偶尔的卡顿,现在是时候拥抱Wayland了。作为Linux桌面图形栈的下一代接班人,Wayland不仅在设计上更现代化,还能带来更流畅的图形体验。本文将…...

数据可视化项目架构全解析:从核心原理到React+ECharts工程实践
1. 项目概述:数据可视化的价值与“SKY-lv/data-visualization”的定位在数据驱动的时代,我们每天都被海量的信息包围。无论是业务报表、用户行为日志,还是传感器采集的时序数据,它们本身只是一堆冰冷的数字。如何让这些数据“开口…...

终极指南:如何用3步清理Windows右键菜单,让电脑操作效率翻倍
终极指南:如何用3步清理Windows右键菜单,让电脑操作效率翻倍 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 你是否曾被Windows右键菜单的…...

Starter计划配额耗尽预警失效?我们逆向解析其API响应头,发现3个未文档化的速率控制暗门
更多请点击: https://intelliparadigm.com 第一章:Starter计划配额耗尽预警失效?我们逆向解析其API响应头,发现3个未文档化的速率控制暗门 在对 Starter 计划的 API 调用行为进行深度监控时,我们观察到配额耗尽告警频…...

基于Vue 3与UnoCSS构建轻量级个人导航页:从零部署到高级定制
1. 项目概述:一个轻量级、可定制的个人导航页 最近在折腾自己的浏览器主页,厌倦了那些臃肿、广告满天飞的默认页面,也受够了每次都要在书签栏里翻找常用链接。作为一个喜欢把一切工具都“私有化”和“个性化”的开发者,我决定自己…...

基于Vercel AI SDK与Next.js的聊天机器人模板开发实战
1. 项目概述:一个开箱即用的AI聊天机器人模板 如果你正在寻找一个能快速启动、功能齐全且易于定制的AI聊天机器人项目,那么Vercel官方出品的这个Chatbot模板绝对值得你花时间研究。它不是一个简单的Demo,而是一个生产就绪的、基于现代Web技术…...

AI赋能二进制安全:BinAIVulHunter项目实战与逆向工程集成
1. 项目概述与核心价值最近在安全圈里,一个名为BinAIVulHunter的开源项目引起了我的注意。这个项目名直译过来就是“二进制AI漏洞猎人”,光看名字就能猜到它的核心玩法:利用人工智能技术,来自动化分析二进制文件,挖掘其…...

如何解锁数字化制造的数据瓶颈:stltostp的轻量级STL转STEP解决方案
如何解锁数字化制造的数据瓶颈:stltostp的轻量级STL转STEP解决方案 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 在数字化制造与工业4.0转型的浪潮中,数据格式的互操作…...

LayerDivider终极指南:5分钟掌握智能插画分层技术
LayerDivider终极指南:5分钟掌握智能插画分层技术 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 你是否曾经面对一张复杂的插画作品…...