C# Onnx 特征匹配 DeDoDe 检测,不描述---描述,不检测
目录
介绍
效果
模型信息
项目
代码
下载
介绍
github地址:https://github.com/Parskatt/DeDoDe
DeDoDe 🎶 Detect, Don't Describe - Describe, Don't Detect, for Local Feature Matching
The DeDoDe detector learns to detect 3D consistent repeatable keypoints, which the DeDoDe descriptor learns to match. The result is a powerful decoupled local feature matcher.

Training DeDoDe
DISCLAMER: I've (Johan) not yet tested that the training scripts here reproduces our original results. This repo is very similar to the internal training repo, but there might be bugs introduced by refactoring etc. Let me know if you face any issues reproducing our results (or if you somehow get better results :D).
See experiments for the scripts to train DeDoDe. We trained on a single A100-40GB with a batchsize of 8. Note that you need to do the data prep first, see data_prep.
As usual, we require that you have the MegaDepth dataset already downloaded, and that you have the prepared scene info from DKM.
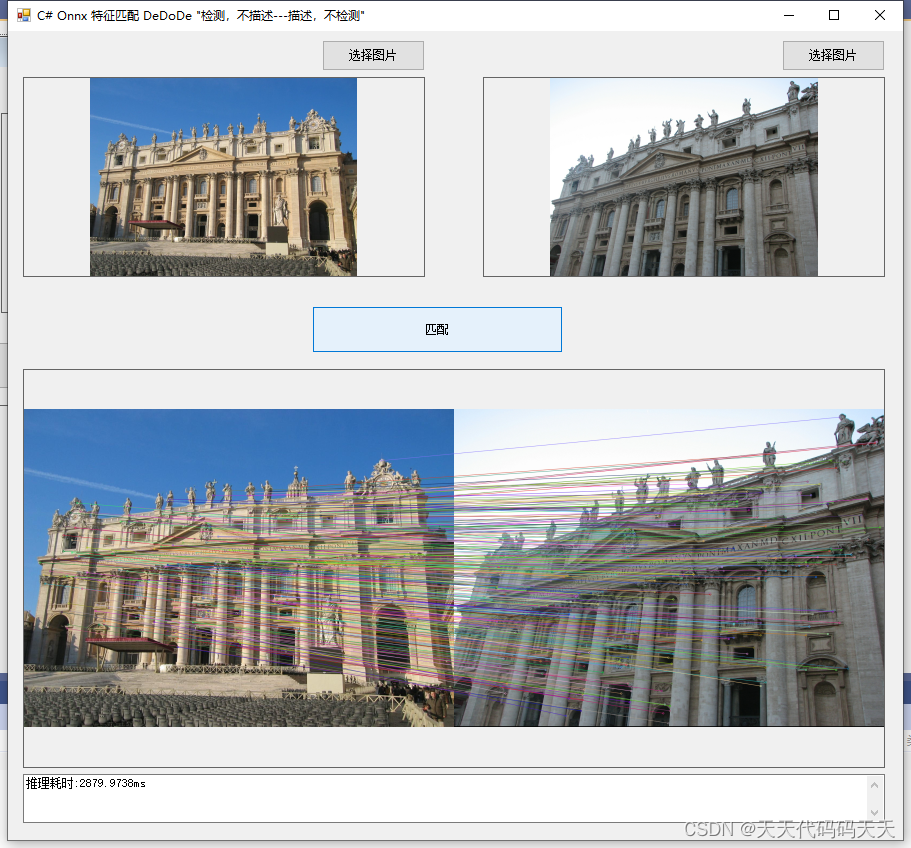
效果
模型信息
Inputs
-------------------------
name:images
tensor:Float[-1, 3, -1, -1]
---------------------------------------------------------------
Outputs
-------------------------
name:matches_A
tensor:Float[-1, -1]
name:matches_B
tensor:Float[-1, -1]
name:batch_ids
tensor:Int64[-1]
---------------------------------------------------------------
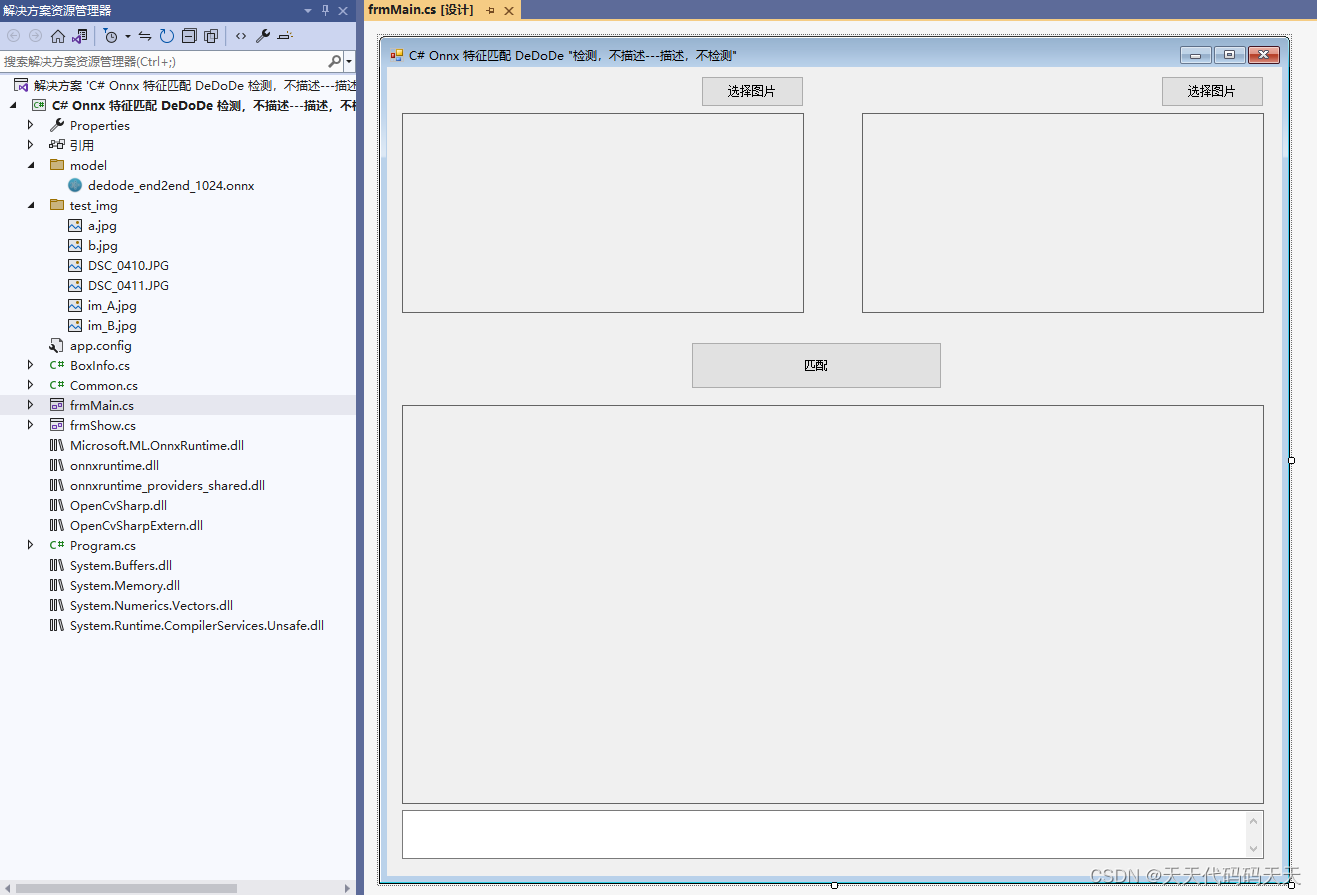
项目
VS2022
.net framework 4.8
OpenCvSharp 4.8
Microsoft.ML.OnnxRuntime 1.16.2
代码
using Microsoft.ML.OnnxRuntime.Tensors;
using Microsoft.ML.OnnxRuntime;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Windows.Forms;
using System.Linq;
using System.Drawing;
using static System.Net.Mime.MediaTypeNames;
using System.Numerics;
namespace Onnx_Demo
{
public partial class frmMain : Form
{
public frmMain()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string image_path = "";
string image_path2 = "";
DateTime dt1 = DateTime.Now;
DateTime dt2 = DateTime.Now;
int inpWidth;
int inpHeight;
float[] mean =new float[] { 0.485f, 0.456f, 0.406f };
float[] std = new float[] { 0.229f, 0.224f, 0.225f };
Mat image;
Mat image2;
string model_path = "";
SessionOptions options;
InferenceSession onnx_session;
Tensor<float> input_tensor;
Tensor<float> mask_tensor;
List<NamedOnnxValue> input_ontainer;
IDisposableReadOnlyCollection<DisposableNamedOnnxValue> result_infer;
DisposableNamedOnnxValue[] results_onnxvalue;
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
pictureBox2.Image = null;
textBox1.Text = "";
image_path = ofd.FileName;
pictureBox1.Image = new System.Drawing.Bitmap(image_path);
image = new Mat(image_path);
}
private void Form1_Load(object sender, EventArgs e)
{
// 创建输入容器
input_ontainer = new List<NamedOnnxValue>();
// 创建输出会话
options = new SessionOptions();
options.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;
options.AppendExecutionProvider_CPU(0);// 设置为CPU上运行
// 创建推理模型类,读取本地模型文件
model_path = "model/dedode_end2end_1024.onnx";
inpHeight = 256;
inpWidth = 256;
onnx_session = new InferenceSession(model_path, options);
// 创建输入容器
input_ontainer = new List<NamedOnnxValue>();
image_path = "test_img/im_A.jpg";
pictureBox1.Image = new Bitmap(image_path);
image_path2 = "test_img/im_B.jpg";
pictureBox3.Image = new Bitmap(image_path2);
}
private unsafe void button2_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
textBox1.Text = "检测中,请稍等……";
pictureBox2.Image = null;
System.Windows.Forms.Application.DoEvents();
image = new Mat(image_path);
image2 = new Mat(image_path2);
float[] input_tensor_data = new float[2 * 3 * inpWidth * inpHeight];
//preprocess
Mat dstimg = new Mat();
Cv2.CvtColor(image, dstimg, ColorConversionCodes.BGR2RGB);
Cv2.Resize(dstimg, dstimg, new OpenCvSharp.Size(inpWidth, inpHeight));
for (int c = 0; c < 3; c++)
{
for (int i = 0; i < inpHeight; i++)
{
for (int j = 0; j < inpWidth; j++)
{
float pix = ((byte*)(dstimg.Ptr(i).ToPointer()))[j * 3 + c];
input_tensor_data[c * inpWidth * inpHeight + i * inpWidth + j] = (float)((pix / 255.0 - mean[c]) / std[c]);
}
}
}
Cv2.CvtColor(image2, dstimg, ColorConversionCodes.BGR2RGB);
Cv2.Resize(dstimg, dstimg, new OpenCvSharp.Size(inpWidth, inpHeight));
for (int c = 0; c < 3; c++)
{
for (int i = 0; i < inpHeight; i++)
{
for (int j = 0; j < inpWidth; j++)
{
float pix = ((byte*)(dstimg.Ptr(i).ToPointer()))[j * 3 + c];
input_tensor_data[(3+c )* inpWidth * inpHeight + i * inpWidth + j] = (float)((pix / 255.0 - mean[c]) / std[c]);
}
}
}
input_tensor = new DenseTensor<float>(input_tensor_data, new[] { 2, 3, inpHeight, inpWidth });
//将 input_tensor 放入一个输入参数的容器,并指定名称
input_ontainer.Add(NamedOnnxValue.CreateFromTensor("images", input_tensor));
dt1 = DateTime.Now;
//运行 Inference 并获取结果
result_infer = onnx_session.Run(input_ontainer);
dt2 = DateTime.Now;
//Postprocessing
//将输出结果转为DisposableNamedOnnxValue数组
results_onnxvalue = result_infer.ToArray();
float[] matches_A = results_onnxvalue[0].AsTensor<float>().ToArray();
float[] matches_B = results_onnxvalue[1].AsTensor<float>().ToArray();
int num_points = results_onnxvalue[0].AsTensor<float>().Dimensions[0];
List<KeyPoint> points_A = new List<KeyPoint>();
List<KeyPoint> points_B = new List<KeyPoint>();
KeyPoint temp;
for (int i = 0; i < num_points; i++)
{
temp = new KeyPoint();
temp.Pt.X = (float)((matches_A[i * 2] + 1) * 0.5 * image.Cols);
temp.Pt.Y = (float)((matches_A[i * 2 + 1] + 1) * 0.5 * image.Rows);
temp.Size = 1f;
points_A.Add(temp);
}
num_points = results_onnxvalue[1].AsTensor<float>().Dimensions[0];
for (int i = 0; i < num_points; i++)
{
temp = new KeyPoint();
temp.Pt.X = (float)((matches_B[i * 2] + 1) * 0.5 * image2.Cols);
temp.Pt.Y = (float)((matches_B[i * 2 + 1] + 1) * 0.5 * image2.Rows);
temp.Size = 1f;
points_B.Add(temp);
}
//匹配结果放在matches里面
num_points = points_A.Count();
List<DMatch> matches=new List<DMatch>();
for (int i = 0; i < num_points; i++)
{
matches.Add(new DMatch(i, i, 0f));
}
//按照匹配关系将图画出来,背景图为match_img
Mat match_img = new Mat();
Cv2.DrawMatches(image, points_A, image2, points_B, matches, match_img);
pictureBox2.Image = new System.Drawing.Bitmap(match_img.ToMemoryStream());
textBox1.Text = "推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms";
}
private void pictureBox2_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox2.Image);
}
private void button3_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox3.Image = null;
pictureBox2.Image = null;
textBox1.Text = "";
image_path2 = ofd.FileName;
pictureBox3.Image = new System.Drawing.Bitmap(image_path2);
image2 = new Mat(image_path2);
}
private void pictureBox3_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox3.Image);
}
private void pictureBox1_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox1.Image);
}
}
}
using Microsoft.ML.OnnxRuntime.Tensors;
using Microsoft.ML.OnnxRuntime;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Windows.Forms;
using System.Linq;
using System.Drawing;
using static System.Net.Mime.MediaTypeNames;
using System.Numerics;namespace Onnx_Demo
{public partial class frmMain : Form{public frmMain(){InitializeComponent();}string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";string image_path = "";string image_path2 = "";DateTime dt1 = DateTime.Now;DateTime dt2 = DateTime.Now;int inpWidth;int inpHeight;float[] mean =new float[] { 0.485f, 0.456f, 0.406f };float[] std = new float[] { 0.229f, 0.224f, 0.225f };Mat image;Mat image2;string model_path = "";SessionOptions options;InferenceSession onnx_session;Tensor<float> input_tensor;Tensor<float> mask_tensor;List<NamedOnnxValue> input_ontainer;IDisposableReadOnlyCollection<DisposableNamedOnnxValue> result_infer;DisposableNamedOnnxValue[] results_onnxvalue;private void button1_Click(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = fileFilter;if (ofd.ShowDialog() != DialogResult.OK) return;pictureBox1.Image = null;pictureBox2.Image = null;textBox1.Text = "";image_path = ofd.FileName;pictureBox1.Image = new System.Drawing.Bitmap(image_path);image = new Mat(image_path);}private void Form1_Load(object sender, EventArgs e){// 创建输入容器input_ontainer = new List<NamedOnnxValue>();// 创建输出会话options = new SessionOptions();options.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;options.AppendExecutionProvider_CPU(0);// 设置为CPU上运行// 创建推理模型类,读取本地模型文件model_path = "model/dedode_end2end_1024.onnx";inpHeight = 256;inpWidth = 256;onnx_session = new InferenceSession(model_path, options);// 创建输入容器input_ontainer = new List<NamedOnnxValue>();image_path = "test_img/im_A.jpg";pictureBox1.Image = new Bitmap(image_path);image_path2 = "test_img/im_B.jpg";pictureBox3.Image = new Bitmap(image_path2);}private unsafe void button2_Click(object sender, EventArgs e){if (image_path == ""){return;}textBox1.Text = "检测中,请稍等……";pictureBox2.Image = null;System.Windows.Forms.Application.DoEvents();image = new Mat(image_path);image2 = new Mat(image_path2);float[] input_tensor_data = new float[2 * 3 * inpWidth * inpHeight];//preprocessMat dstimg = new Mat();Cv2.CvtColor(image, dstimg, ColorConversionCodes.BGR2RGB);Cv2.Resize(dstimg, dstimg, new OpenCvSharp.Size(inpWidth, inpHeight));for (int c = 0; c < 3; c++){for (int i = 0; i < inpHeight; i++){for (int j = 0; j < inpWidth; j++){float pix = ((byte*)(dstimg.Ptr(i).ToPointer()))[j * 3 + c];input_tensor_data[c * inpWidth * inpHeight + i * inpWidth + j] = (float)((pix / 255.0 - mean[c]) / std[c]);}}}Cv2.CvtColor(image2, dstimg, ColorConversionCodes.BGR2RGB);Cv2.Resize(dstimg, dstimg, new OpenCvSharp.Size(inpWidth, inpHeight));for (int c = 0; c < 3; c++){for (int i = 0; i < inpHeight; i++){for (int j = 0; j < inpWidth; j++){float pix = ((byte*)(dstimg.Ptr(i).ToPointer()))[j * 3 + c];input_tensor_data[(3+c )* inpWidth * inpHeight + i * inpWidth + j] = (float)((pix / 255.0 - mean[c]) / std[c]);}}}input_tensor = new DenseTensor<float>(input_tensor_data, new[] { 2, 3, inpHeight, inpWidth });//将 input_tensor 放入一个输入参数的容器,并指定名称input_ontainer.Add(NamedOnnxValue.CreateFromTensor("images", input_tensor));dt1 = DateTime.Now;//运行 Inference 并获取结果result_infer = onnx_session.Run(input_ontainer);dt2 = DateTime.Now;//Postprocessing//将输出结果转为DisposableNamedOnnxValue数组results_onnxvalue = result_infer.ToArray();float[] matches_A = results_onnxvalue[0].AsTensor<float>().ToArray();float[] matches_B = results_onnxvalue[1].AsTensor<float>().ToArray();int num_points = results_onnxvalue[0].AsTensor<float>().Dimensions[0];List<KeyPoint> points_A = new List<KeyPoint>();List<KeyPoint> points_B = new List<KeyPoint>();KeyPoint temp;for (int i = 0; i < num_points; i++){temp = new KeyPoint();temp.Pt.X = (float)((matches_A[i * 2] + 1) * 0.5 * image.Cols);temp.Pt.Y = (float)((matches_A[i * 2 + 1] + 1) * 0.5 * image.Rows);temp.Size = 1f;points_A.Add(temp);}num_points = results_onnxvalue[1].AsTensor<float>().Dimensions[0];for (int i = 0; i < num_points; i++){temp = new KeyPoint();temp.Pt.X = (float)((matches_B[i * 2] + 1) * 0.5 * image2.Cols);temp.Pt.Y = (float)((matches_B[i * 2 + 1] + 1) * 0.5 * image2.Rows);temp.Size = 1f;points_B.Add(temp);}//匹配结果放在matches里面num_points = points_A.Count();List<DMatch> matches=new List<DMatch>();for (int i = 0; i < num_points; i++){matches.Add(new DMatch(i, i, 0f));}//按照匹配关系将图画出来,背景图为match_imgMat match_img = new Mat();Cv2.DrawMatches(image, points_A, image2, points_B, matches, match_img);pictureBox2.Image = new System.Drawing.Bitmap(match_img.ToMemoryStream());textBox1.Text = "推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms";}private void pictureBox2_DoubleClick(object sender, EventArgs e){Common.ShowNormalImg(pictureBox2.Image);}private void button3_Click(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = fileFilter;if (ofd.ShowDialog() != DialogResult.OK) return;pictureBox3.Image = null;pictureBox2.Image = null;textBox1.Text = "";image_path2 = ofd.FileName;pictureBox3.Image = new System.Drawing.Bitmap(image_path2);image2 = new Mat(image_path2);}private void pictureBox3_DoubleClick(object sender, EventArgs e){Common.ShowNormalImg(pictureBox3.Image);}private void pictureBox1_DoubleClick(object sender, EventArgs e){Common.ShowNormalImg(pictureBox1.Image);}}
}
下载
源码下载
相关文章:
C# Onnx 特征匹配 DeDoDe 检测,不描述---描述,不检测
目录 介绍 效果 模型信息 项目 代码 下载 介绍 github地址:https://github.com/Parskatt/DeDoDe DeDoDe 🎶 Detect, Dont Describe - Describe, Dont Detect, for Local Feature Matching The DeDoDe detector learns to detect 3D consisten…...

第十六章 处理空字符串和 Null 值
文章目录 第十六章 处理空字符串和 Null 值空字符串和 Null 值的默认映射导出值控制空元素的形式 第十六章 处理空字符串和 Null 值 类和属性参数 XMLUSEEMPTYELEMENT XMLIGNORENULL XMLNILNOOBJECT XMLNIL 空字符串和 Null 值的默认映射 下表总结了空字符串和 null 值的…...

MYSQL 处理重复数据
文章目录 前言防止表中出现重复数据统计重复数据过滤重复数据删除重复数据在这里插入代码片后言 前言 hello world欢迎来到前端的新世界 😜当前文章系列专栏:Mysql 🐱👓博主在前端领域还有很多知识和技术需要掌握,正…...

世岩清上:未来科技展览的策展视野
面对科技未来,策展视野的核心在于把握趋势,理解人性,并充分运用科技手段提升观众的体验。以下是我对未来科技展览的策展视野。 一、以人为本的设计理念 科技发展的最终目的是服务于人类,提升人们的生活质量。因此,展…...

如何理解2023vivo开发者大会,使用Rust语言编写蓝河操作系统(BlueOS)?
在2023年vivo开发者大会上,vivo宣布使用Rust语言编写其蓝河操作系统(BlueOS)。 什么是Rust语言? Rust 是一种开放源代码系统编程语言,可用于开发高效、安全的软件。 使用 Rust 可管理内存并控制其低级详细信息。 但你…...

Android flutter this and base files have different roots
类似经历者 Android build fails with certain plugins if project is in a different drive (from sdk) 错误描述 我是windows系统,下载 flutter sdk 我是放在D盘,flutter项目是放在E盘,flutter 执行 pub get的时候,会在我C盘…...
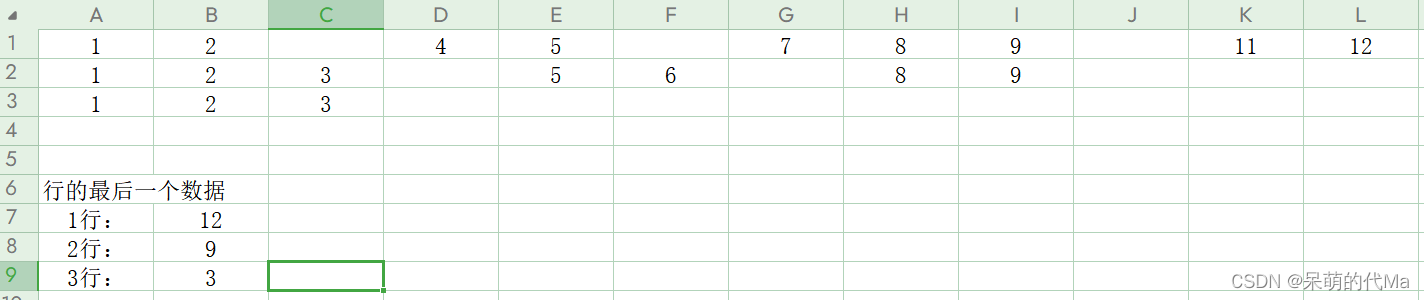
Excel动态选择某一行/列的最后一个数据
选择列的最后一个数据: 以A列为例,使用: LOOKUP(1,0/(A:A<>""),A:A)选择行的最后一个数据: 以第3行为例,使用: LOOKUP(1,0/(3:3<>""),3:3)示例程序 列最后一个数据&a…...
扫描条形码到电脑:Barcode to pc 4.6.3 Crack
像专业人士一样使用条形码将条形码发送到 PC 排名第一的智能手机扫描应用程序 将条形码即时发送到计算机程序并自动执行任务的最简单方法 受到全球 500,000 多名用户的信赖 条形码到 PC:Wi-Fi 扫描仪应用程序,条码到 PC:适用于 Android 和 i…...

从0到0.01入门 Webpack| 003.精选 Webpack面试题
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...
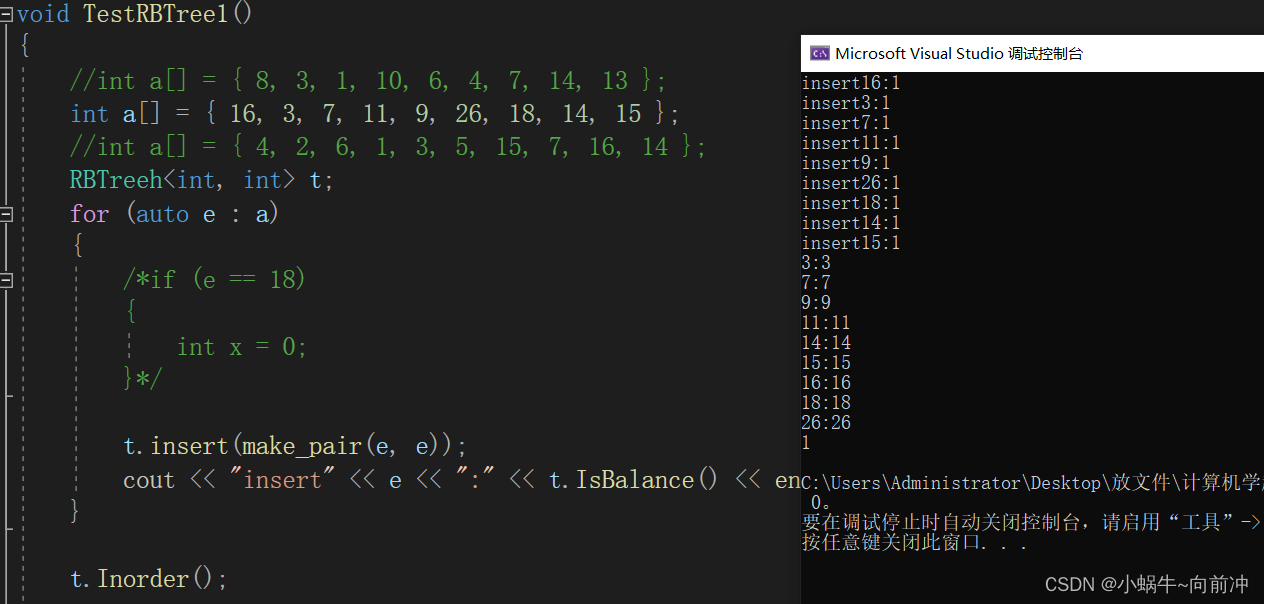
[数据结构]-红黑树
前言 作者:小蜗牛向前冲 名言:我可以接受失败,但我不能接受放弃 如果觉的博主的文章还不错的话,还请点赞,收藏,关注👀支持博主。如果发现有问题的地方欢迎❀大家在评论区指正 目录 一、红黑树的…...

Android 13.0 Launcher3 app列表页桌面图标按安装时间排序
1.概述 在13.0的系统rom定制化开发中,在对Launcher3进行功能开发时,系统默认的app列表页排序是安装app名称进行排序的, 由于功能的需要要求按照app安装时间进行排序,这就需要找到相关的排序地方,进行排序方式的修改就能完成这个功能 2.Launcher3 app列表页桌面图标按安装…...

QFont如何设置斜体|QlineEdit设置只能输入数字|QThread::finished信号发出后worker未调用析构函数
QFont如何设置斜体 要设置 QFont 的斜体,你可以使用 setItalic() 方法。以下是一个示例代码: #include <QApplication> #include <QLabel> #include <QFont> int main(int argc, char *argv...

中伟视界:创新解决方案,搭建自适应的AI算法模型训练平台
搭建AI算法模型自训练平台是当今人工智能领域的热门话题,但是其中存在着许多技术难点需要克服。 自训练平台需要具备高效的算法模型,这就要求能够处理庞大的数据量并进行高速计算。 平台需要具备强大的数据管理及存储能力,以满足训练过程中的…...
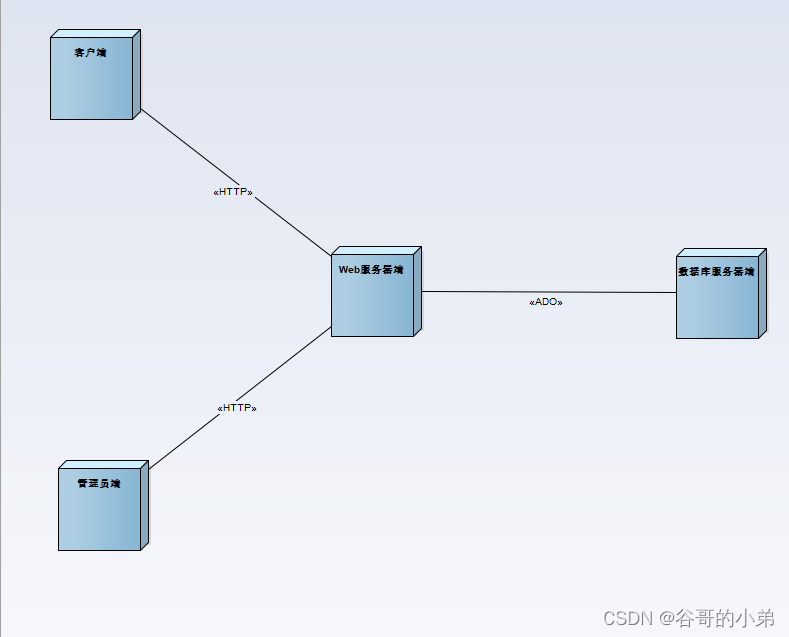
UML建模图文详解教程08——部署图
版权声明 本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl本文参考资料:《UML面向对象分析、建模与设计(第2版)》吕云翔,赵天宇 著 部署图概述 部署图(deployment diagram)也被译作配置…...
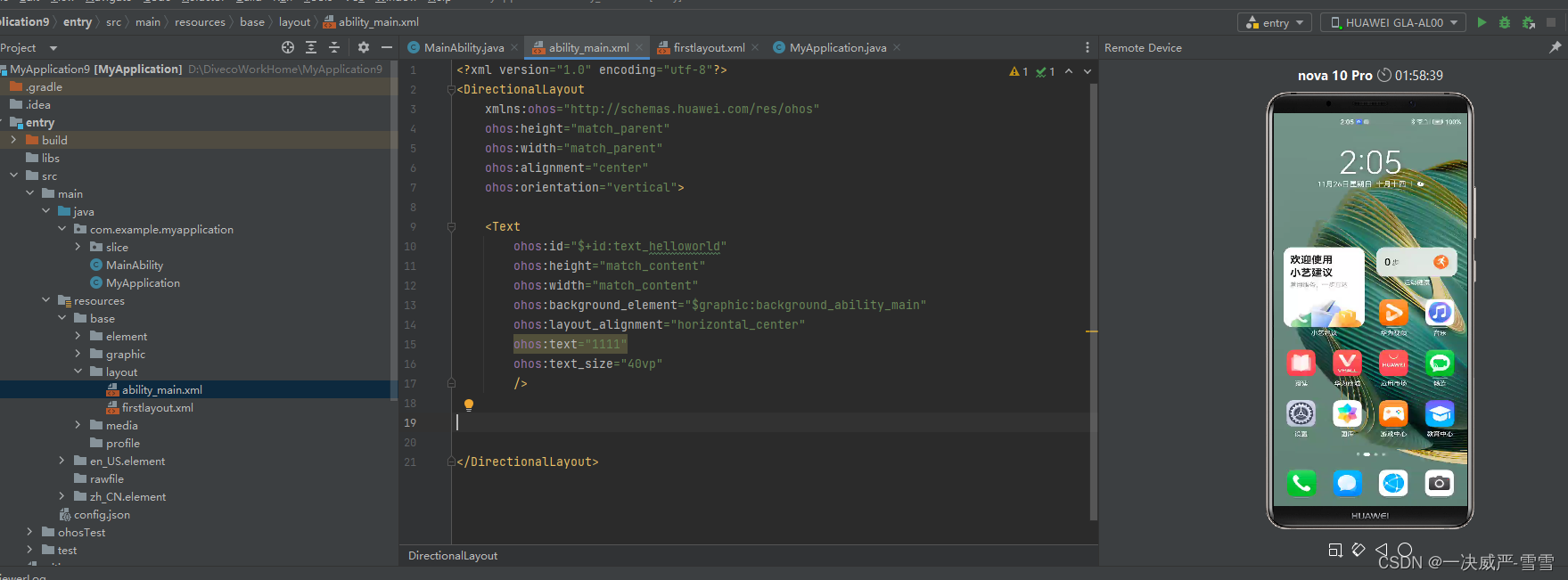
发布鸿蒙的第一个java应用
1.下载和安装华为自己的app开发软件DevEco Studio HUAWEI DevEco Studio和SDK下载和升级 | HarmonyOS开发者 2.打开IDE新建工程(当前用的IDEA 3.1.1 Release) 选择第一个,其他的默认只能用(API9)版本,搞了半天才发现8ÿ…...
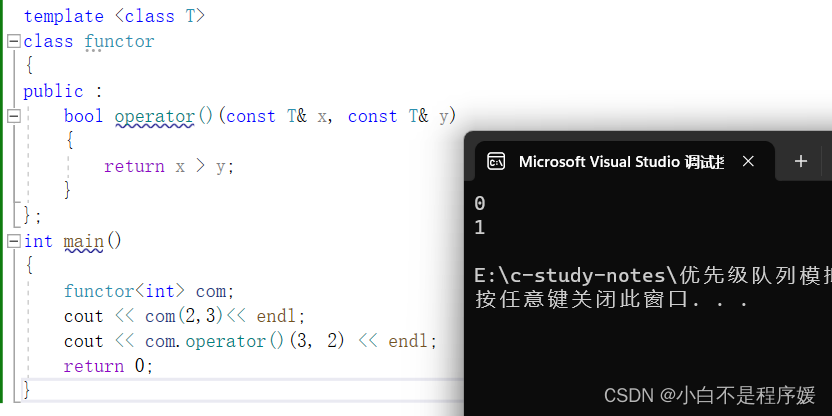
【C++干货铺】优先队列 | 仿函数
个人主页点击直达:小白不是程序媛 C系列专栏:C干货铺 代码仓库:Gitee 目录 优先队列(priority_queue )的介绍和使用 priority_queue的介绍 priority_queue的使用 大堆 小堆 priority_queue的模拟实现 仿…...
突破技术障碍:软件工程师如何应对项目中的难题?
在软件开发项目中,工程师常常会遇到各种技术难题。这些难题可能涉及到复杂的算法、不兼容的系统、难以预见的软件行为,或者其他许多方面。 以下是一些策略和方法,可以帮助软件工程师有效地应对这些挑战: 1、理解问题:…...
Linux(7):Vim 程序编辑器
vi 基本上 vi 共分为三种模式,分别是【一般指令模式】、【编辑模式】与【指令列命令模式】。 这三种模式的作用分别是: 一般指令模式(command mode) 以 vi 打开一个文件就直接进入一般指令模式了(这是默认的模式,也简称为一般模式)。在这个模…...

windows搭建gitlab教程
1.安装gitlab 说明:由于公司都是windows服务器,这里安装以windows为例,先安装一个虚拟机,然后安装一个docker(前提条件) 1.1搜索镜像 docker search gitlab #搜索所有的docker search gitlab-ce-zh #搜索…...

力扣:单调栈算法思路题
单调栈分为单调递增栈和单调递减栈,通过使用单调栈我们可以访问到最近一个比它大(小)的元素。 🍊 单调递增栈:单调递增栈就是从栈底到栈顶数据是依次递增,通常是寻找某方向第一个比它小的元素。 …...

告别充电焦虑:深度解析IP2326如何实现2S锂电池的智能平衡充电与安全保护
告别充电焦虑:深度解析IP2326如何实现2S锂电池的智能平衡充电与安全保护 在便携式设备和小型机器人设计中,锂电池管理系统(BMS)的性能直接决定了产品的可靠性和用户体验。传统分立式平衡充电方案往往面临电路复杂、体积庞大和调试…...

STM32F103RCT6驱动AD9833信号发生器:从SPI配置到波形输出的保姆级避坑指南
STM32F103RCT6驱动AD9833信号发生器:从SPI配置到波形输出的保姆级避坑指南 第一次用STM32驱动AD9833时,我盯着示波器上扭曲的波形发呆了半小时——明明代码和电路都照着参考设计做的,为什么输出的正弦波像被狗啃过一样?这个问题困…...
)
汇编语言新手必看:CF/OF/SF/ZF标志位在加减运算中的实战解析(附代码示例)
汇编语言新手必看:CF/OF/SF/ZF标志位在加减运算中的实战解析(附代码示例) 刚接触汇编语言时,那些神秘的标志位总是让人摸不着头脑。CF、OF、SF、ZF这些看似简单的字母组合,实际上掌控着程序流程的关键命脉。记得我第一…...

STM32F4标准库 DMA FSMC驱动TFT-LCD:从CPU瓶颈到DMA高效刷屏实战
1. 为什么需要DMAFSMC方案优化TFT-LCD刷新 当你用STM32F4驱动TFT-LCD时,是否遇到过画面刷新卡顿、CPU占用率飙升的情况?这通常是因为传统的逐点描画方式(比如LCD_DrawPoint函数)需要CPU频繁介入每个像素的写入操作。我最初用9341驱…...

低查重AI教材生成秘籍大公开!专业工具助力高效编写优质教材!
编写教材的变革:AI 时代的新选择 编写教材离不开丰富的资料支持,但传统的资料整合方式已经无法满足现今的需求。以前,我们需要从各类渠道,例如课标文件、学术研究和教学案例中收集信息,这些资料分散在知网、教研平台等…...

STM32F4 ADC初始化实战:从零开始配置模数转换器
1. STM32F4 ADC模块基础认知 第一次接触STM32F4的ADC功能时,我对着数据手册发呆了半小时——那些专业术语就像天书一样。后来在实际项目中摸爬滚打才发现,理解ADC其实可以很直观。想象ADC就是个"翻译官",把模拟世界的连续信号&…...

Magic-Trace 终极指南:从入门到精通的高性能代码追踪工具
Magic-Trace 终极指南:从入门到精通的高性能代码追踪工具 【免费下载链接】magic-trace magic-trace collects and displays high-resolution traces of what a process is doing 项目地址: https://gitcode.com/gh_mirrors/ma/magic-trace magic-trace 是一…...
)
从入门到精通:CST中WCS坐标系与Pick功能的完整指南(含参数化建模实例)
从入门到精通:CST中WCS坐标系与Pick功能的完整指南(含参数化建模实例) 在电磁仿真领域,CST Studio Suite作为行业标杆工具,其建模效率直接决定了整个设计流程的顺畅程度。而WCS(工作坐标系)和Pi…...

Win11Debloat终极指南:免费快速优化Windows 11系统的完整方案
Win11Debloat终极指南:免费快速优化Windows 11系统的完整方案 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter…...

3个关键步骤+5分钟上手:PPTist在线演示文稿工具完全指南
3个关键步骤5分钟上手:PPTist在线演示文稿工具完全指南 【免费下载链接】PPTist PowerPoint-ist(/pauəpɔintist/), An online presentation application that replicates most of the commonly used features of MS PowerPoint, allowing f…...