34970A 数据采集 / 数据记录仪开关单元

34970A 数据采集 / 数据记录仪开关单元
产品综述:
Keysight 34970A 数据采集/数据记录仪开关单元由一个 3 插槽主机和一个内置的 6 1/2 位数字万用表组成。每个通道可以单独配置,以测量 11 种不同功能之一,这样既不会增加成本,也不必使用复杂的信号调理附件。您可用 8 种可选插入模块建造紧凑的数据记录仪,全功能数据采集系统或低成本的开关单元。模块上的螺钉连接可不需要终端接线盒,独特的继电器维护功能记录每个开关的闭合次数,从而实现容易和可预期的继电器维护。最流行的 34901A 模块具有内置的热电偶参考和 20 个 2 线通道。
功能特点
34970A

特性
内置 GPIB 和 RS232 接口的 3 插槽主机
6 1/2 位(22 比特)内置数字万用表,每秒最多可以扫描 250 个通道
8 种开关和控制插入式模块可供选择
内置信号调理功能可以用于测量热电偶、RTD 和热敏电阻、直流/交流电压和电流;电阻;频率和周期
非易失存储器可存储 5 万个读数,可在断电时保持数据
每个通道都有 HI/LO 极限报警功能,以及 4 个 TTL 报警输出
BenchVue 软件许可证 BV0006B 现在包含在您的仪器中。BenchVue 让连接和控制仪器以及自动执行测试序列变得非常简单
34970A
数据采集和开关
插入式模块产品比较
Keysight’s BenchVue DAQ 控制和分析应用软件可与 DAQ970A、34970A、34972A 與 34980A 结合使用。BenchVue 为您提供直观的用户界面,方便您执行测试配置和实时数据显示与分析。BenchVue 支持您快速设置和执行测量,以及通过各种显示类型导出数据或记录和查看实时测量结果,从而更快地解释数据。
34970A 数据采集开关单元


![]()
END
相关文章:

34970A 数据采集 / 数据记录仪开关单元
34970A 数据采集 / 数据记录仪开关单元 产品综述: Keysight 34970A 数据采集/数据记录仪开关单元由一个 3 插槽主机和一个内置的 6 1/2 位数字万用表组成。每个通道可以单独配置,以测量 11 种不同功能之一,这样既不会增加成本,也…...
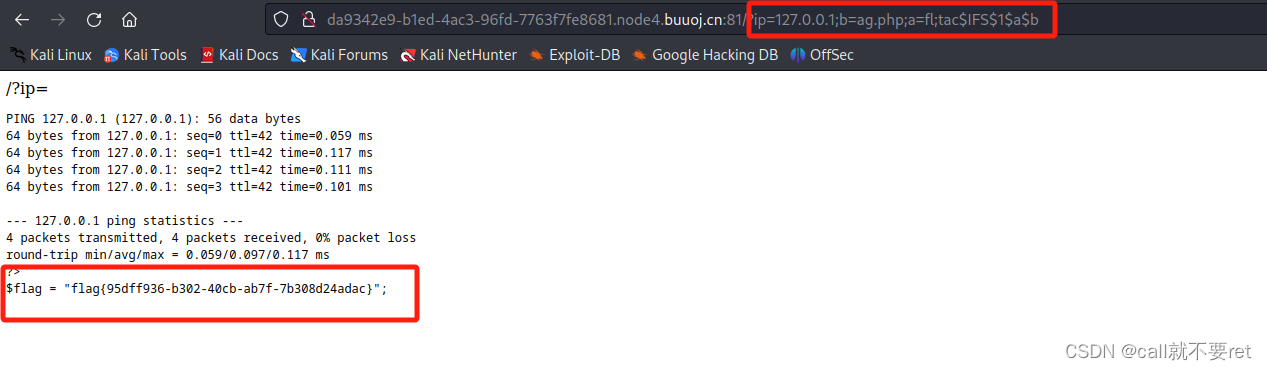
BUUCTF刷题之路-web-[GXYCTF2019]Ping Ping Ping1
启动环境后,是一个简简单单的页面: 看样子是能够触发远程执行漏洞的。尝试下ping 127.0.0.1,如果有回显说明我们的想法是对的。 最近才学习的nc反弹shell。想着是否能用nc反弹shell的办法。控制服务器然后输出flag呢?于是我测试下…...

一、深入简出串口(USRT)通信——基本概念。
一、前言 串口到底是什么?简单来说一句话就可以解释,串口就是一种通信协议。 看到这里可能大家会觉得你这不是放屁么,说了跟没说一样。所以这里做前言来描述,大家要先对通信协议有一个下意识地认识才能在学习串口的时候不至于迷茫…...
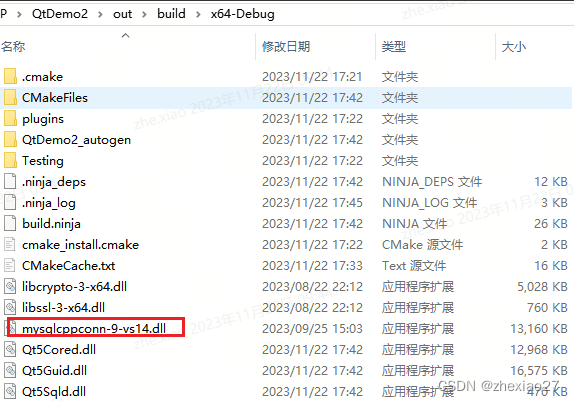
采用connector-c++ 8.0操作数据库
1.下载最新的Connector https://dev.mysql.com/downloads/connector/cpp/,下载带debug的库。 解压缩到本地,本次使用的是带debug模式的connector库: 注:其中mysqlcppconn与mysqlcppconn8的区别是: 2.在cmakelist…...

【Java数据结构 -- 时间和空间复杂度】
时间和空间复杂度 1. 算法效率2. 时间复杂度2.1 时间复杂度的概念2.2 大O的渐进表示法2.3 推导大O阶方法2.4 常见时间复杂度计算举例例1例2例3例4 计算 bubbleSort的时间复杂度例5 计算binarySearch的时间复杂度?例6 计算阶乘递归factorial的时间复杂度?…...

【每日一题】1457. 二叉树中的伪回文路径-2023.11.25
题目: 1457. 二叉树中的伪回文路径 给你一棵二叉树,每个节点的值为 1 到 9 。我们称二叉树中的一条路径是 「伪回文」的,当它满足:路径经过的所有节点值的排列中,存在一个回文序列。 请你返回从根到叶子节点的所有路…...

能让PDF看起来像是扫描件的Look Scanned
什么是 Look Scanned ? Look Scanned 是一个能够让 PDF 看起来就像是扫描件一样的纯前端网站。你再也不需要麻烦地打印之后扫描了,你所需要的就是鼠标点几下。 这是个挺有意思的软件,但是老苏不确定什么场景下会用到这个软件,如果不想自己搭…...

RT-DETR 更换损失函数之 SIoU / EIoU / WIoU / Focal_xIoU
文章目录 更换方式CIoUDIoUEIoUGIoUSIoUWIoUFocal_CIoUFocal_DIoUFocal_EIoUFocal_GIoUFocal_SIoU提示更换方式 第一步:将ultralytics/ultralytics/utils/metrics.py文件中的bbox_iou替换为如下的代码:class...

代码随想录算法训练营第四十六天 | 139.单词拆分,多重背包,背包问题总结
目录 139.单词拆分 多重背包 背包问题总结 01背包 完全背包 多重背包 139.单词拆分 题目链接:139. 单词拆分 不要求字典中的单词全部使用,但是要求拆分的单词拆分成的每一个子串都是字典中的单词。 (1)dp[ i ] 表示前 i 个字符组成…...
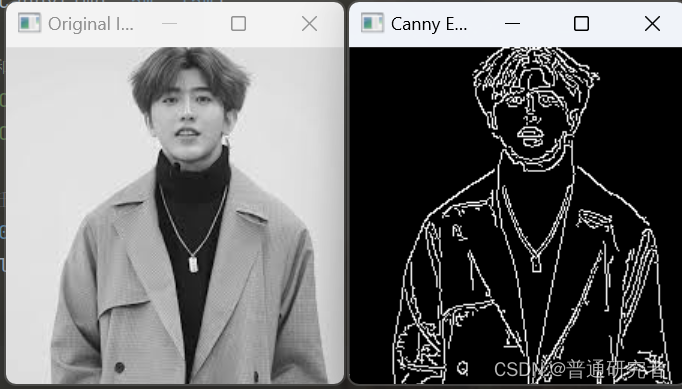
opencv-Canny 边缘检测
Canny边缘检测是一种经典的图像边缘检测算法,它在图像中找到强度梯度的变化,从而识别出图像中的边缘。Canny边缘检测的优点包括高灵敏度和低误检率。 在OpenCV中,cv2.Canny() 函数用于执行Canny边缘检测。 基本语法如下: edges…...

案例023:基于微信小程序的童装商城的设计与实现
文末获取源码 开发语言:Java 框架:SSM JDK版本:JDK1.8 数据库:mysql 5.7 开发软件:eclipse/myeclipse/idea Maven包:Maven3.5.4 小程序框架:uniapp 小程序开发软件:HBuilder X 小程序…...

Ansible的循环:loop,with_<lookup>和until
环境 管理节点:Ubuntu 22.04控制节点:CentOS 8Ansible:2.15.6 循环的方法 loopwith_<lookup>until 用这几种方式都可以实现循环。其中, loop 是推荐的用法,在很多时候能够替换 with_<lookup> 。 loop…...

点云 surface 方法总结
点云的表面方法是指通过点云数据来估计和重建物体或场景的表面几何形状。下面总结了几种常见的点云表面方法: 三角化:三角化是最常用的点云表面重建方法之一。它将点云中的点连接成三角形网格,从而重建出物体或场景的表面。常见的三角化算法…...

深入探索Linux文件系统:属性、路径与隐藏之谜
🎥 屿小夏 : 个人主页 🔥个人专栏 : Linux系统理论 🌄 莫道桑榆晚,为霞尚满天! 文章目录 📑前言🌤️文件的组成☁️文件属性☁️文件内容☁️注意事项 🌤️路…...

梯度详解与优化实战
什么是梯度 对所有自变量求偏微分构成的向量,它是一个向量(有大小和函数值增长方向) 导数是一个标量 找最小值点坐标的案例 import torchimport numpy as np import matplotlib.pyplot as plt def himmelblau(x):return (x[0]**2x[1]-11)…...

OSG编程指南<十二>:OSG二三维文字创建及文字特效
1、字体基础知识 适当的文字信息对于显示场景信息是非常重要的。在 OSG 中,osgText提供了向场景中添加文字的强大功能,由于有第三方插件 FreeType 的支持,它完全支持TrueType 字体。很多人可能对 FreeType 和 TrueType 还不太了解,…...
visionOS空间计算实战开发教程Day 6 拖拽和点击
在之前的学习中我们在空间中添加了3D模型,但在初始摆放后就无法再对其进行移动或做出修改。本节我们在Day 5显示和隐藏的基础上让我们模型可以实现拖拽效果,同时对纯色的立方体实现点击随机换色的功能。 首先是入口文件,无需做出改变…...
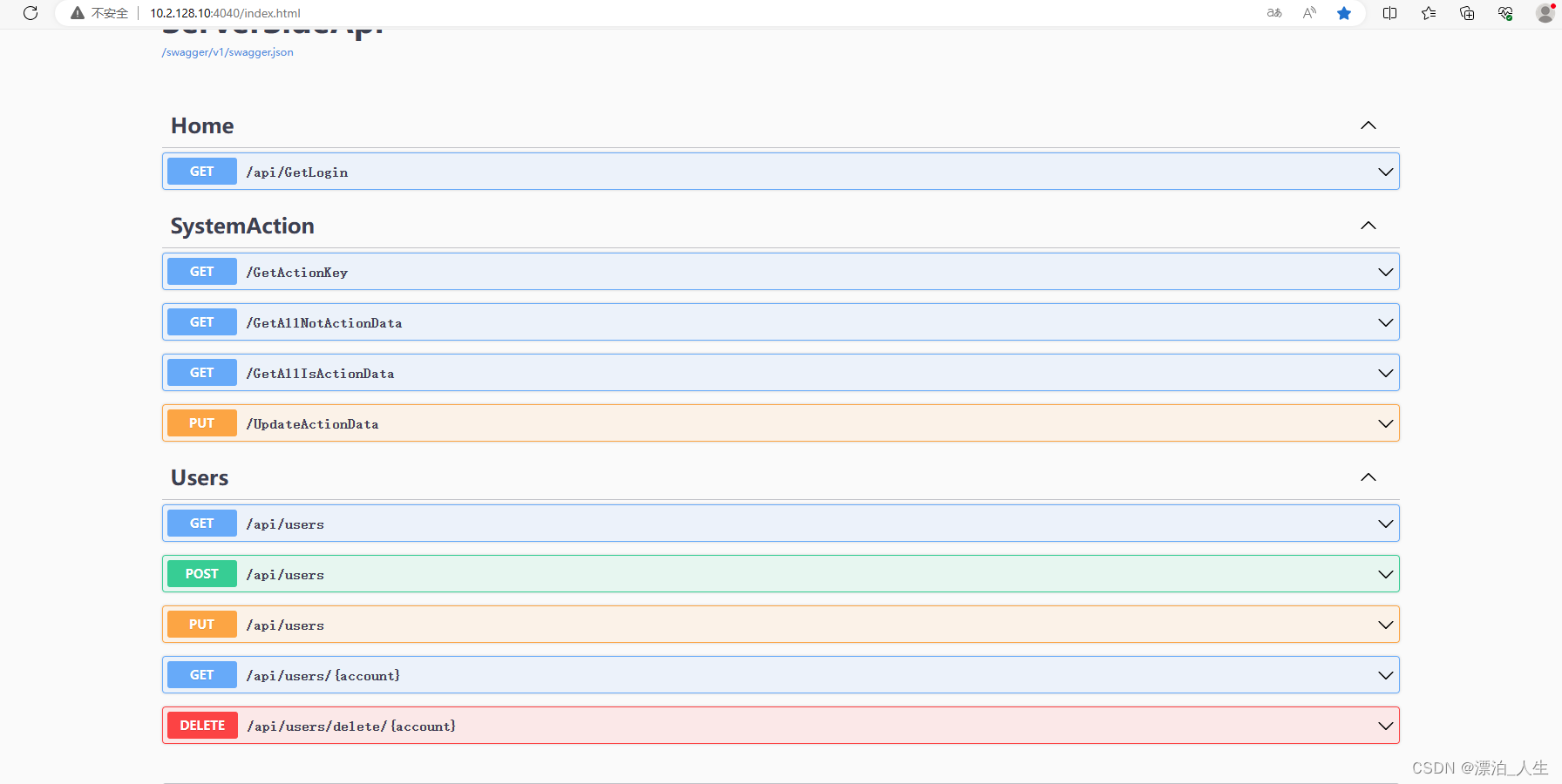
C# APS.NET CORE 6.0 WEB API IIS部署
1.创建 APS.NET CORE6.0 WEB API项目 默认选项即可 源代码: 项目文件展开: launchSettings.json {"$schema": "https://json.schemastore.org/launchsettings.json","iisSettings": {"windowsAuthentication"…...
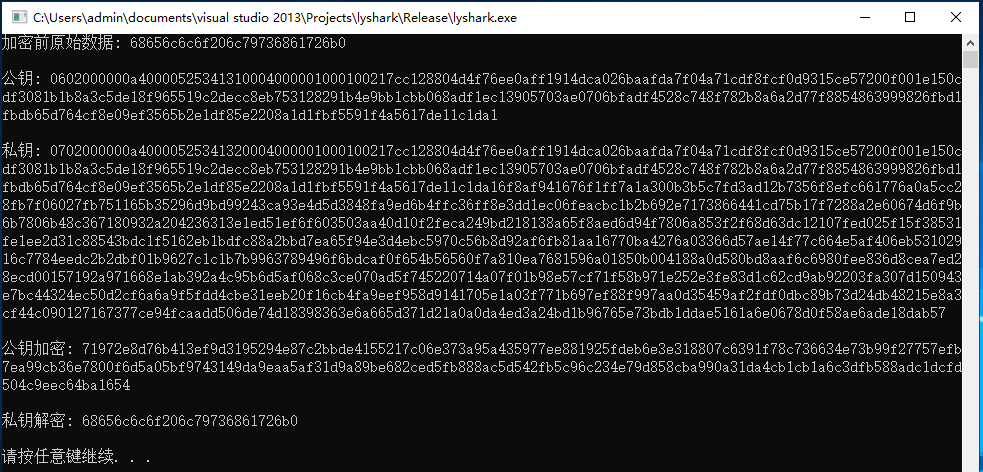
C/C++ 常用加密与解密算法
计算机安全和数据隐私是现代应用程序设计中至关重要的方面。为了确保数据的机密性和完整性,常常需要使用加密和解密算法。C是一种广泛使用的编程语言,提供了许多加密和解密算法的实现。本文将介绍一些在C中常用的加密与解密算法,这其中包括Xo…...

从Qt源码的角度分析Qt对象树与内存管理模式
作者:令狐掌门 技术交流QQ群:675120140 csdn博客:https://mingshiqiang.blog.csdn.net/ 文章目录 一、Qt对象树(Object Tree)和父子关系二、源码角度:QObject的内存管理构造函数析构函数addChild() 和 removeChild()三、C++模拟实现Qt的对象树内存管理模式Qt框架提供了一…...

CS146S课程解析:LLM上限就是开发者的上限
第 6 周:AI 测试与安全 安全编码在 AI 时代变得更加重要。本周覆盖 SAST、DAST、漏洞检测、AI 生成的测试用例,以及如何用 Semgrep 等工具进行安全扫描。 第 7 周:现代软件支持 AI 代码审查、智能文档生成、调试辅助。如何建立对 AI 生成代码…...

抖音视频批量下载技术实战:douyin-downloader架构设计与应用指南
抖音视频批量下载技术实战:douyin-downloader架构设计与应用指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fall…...

如何通过drawio-libs图标库将专业图表绘制效率提升300%
如何通过drawio-libs图标库将专业图表绘制效率提升300% 【免费下载链接】drawio-libs Libraries for draw.io 项目地址: https://gitcode.com/gh_mirrors/dr/drawio-libs drawio-libs是一个为draw.io和diagrams.net提供丰富专业图标资源的开源库集合,涵盖网络…...

微信小程序实战:打造优雅的互动消息列表(评论 / 点赞 / 关注
在绿植类小程序开发中,互动消息模块(评论、点赞、关注)是提升用户粘性的核心场景。本文将基于实际开发场景,分享如何快速实现风格统一、交互友好的评论详情、点赞详情、关注详情列表页面,包含完整的代码实现和样式设计…...

如何在普通电脑上运行AI绘画神器:6GB显存玩转FLUX.1-dev FP8量化模型终极指南
如何在普通电脑上运行AI绘画神器:6GB显存玩转FLUX.1-dev FP8量化模型终极指南 【免费下载链接】flux1-dev 项目地址: https://ai.gitcode.com/hf_mirrors/Comfy-Org/flux1-dev 想要在普通电脑上体验专业级AI绘画的魅力吗?FLUX.1-dev FP8量化模型…...

AI Agent工作流分布式追踪实战:OpenTelemetry从黑盒到透明化的调试方案
一、背景与挑战 在构建复杂的AI Agent工作流时,你是否遇到过这样的调试困境:一个包含数据获取、多模型推理、结果整合的流程突然失败,却无法快速定位具体卡在哪一步?日志分散在各个组件,指标只能告诉你"有错误&qu…...

RexUniNLU真实生成效果:医疗问诊记录中症状实体+情感倾向联合输出
RexUniNLU真实生成效果:医疗问诊记录中症状实体情感倾向联合输出 1. 引言:当AI能看懂病历和感受情绪 想象一下,一位医生每天要面对几十份电子病历和问诊记录。他需要快速找出病人的关键症状,同时还要判断病人描述病情时的情绪状…...

一款即插即用的西门子PLC测试工具,全面支持S7200、SMART 1200、1500、300...
西门子PLC测试工具,支持S7200,SMART 1200 1500 300等各种PLC,到手即用,。搞自动化的小伙伴们有没有遇到过PLC调试效率低的问题?今天要安利的这个西门子全家桶测试工具,简直就是程序员的物理外挂。从老掉牙的…...

一款轻量级、纯粹的 Linux 服务器监控工具
👉 这是一个或许对你有用的社群🐱 一对一交流/面试小册/简历优化/求职解惑,欢迎加入「芋道快速开发平台」知识星球。下面是星球提供的部分资料: 《项目实战(视频)》:从书中学,往事上…...

终极HTML转DOCX指南:浏览器端文档转换的完整解决方案
终极HTML转DOCX指南:浏览器端文档转换的完整解决方案 【免费下载链接】html-docx-js Converts HTML documents to DOCX in the browser 项目地址: https://gitcode.com/gh_mirrors/ht/html-docx-js HTML转DOCX技术在现代Web开发中扮演着关键角色,…...