【opencv】计算机视觉:停车场车位实时识别
目录
目标
整体流程
背景
详细讲解
目标
我们想要在一个实时的停车场监控视频中,看看要有多少个车以及有多少个空缺车位。然后我们可以标记空的,然后来车之后,实时告诉应该停在那里最方便、最近!!!实现现代的智能无人停车场!
整体流程
采用基于OpenCV的图像处理方法来解决停车场空车位实时监测和精准定位问题。首先,将实时监控视频录像信息转化成图像信息。对图像进行形态学处理,然后定位停车场关键点,使用掩码图像与原始图像融合对停车位区域进行背景去除,处理之后采用霍夫直线检测的方法来检测停车位标记线,在画好线的图像中进行分割,分割出每一个停车位并编号。最后利用Keras神经网络对有车车位和空车位进行训练,对当前图像中车位是否为空闲进行判断并且实时更新,再以图像流输出,完成实时监测空车位的任务。
背景
由于汽车工业的发展迅速以及人们生活水平的提高,我国汽车的保有量不断增长,而停车位的数量有限,从而出现停车困难以及停车效率低,浪费时间甚至造成拥堵、事故等。实时检测并掌握停车位的数目和空车位的位置信息可以避免资源以及时间的浪费,提高效率,也更便于停车位的管理。因此停车位可视化尤为重要。传统的基于视觉的停车位检测方法具有检测精度不高、场景环境要求高等问题。本文旨在通过边缘检测来进行停车位划分,对图像背景过滤再定位提取有用区域,进行车位是否空闲的判断并实时更新,再以图像流输出。
详细讲解
首先我们需要了解的就是对于一个视频来说,它是由一帧一帧的图像构成的,所以对于一段视频的处理就相当于对于图像进行处理,前一帧图像和后一帧处理图像的衔接那么就是一个视频处理的结果。
我们对于一个图像的处理,首先我们利用视频中的一张图来看一下停车场的某一帧图像。

这里就是一个停车场的其中一帧的一个图像,其实他这里有很多车,如果没有车的话,也就是说是一个空车场他的检测效果会非常的好。我们首先要对图像进行几个形态学的操作。其中包括灰度空间转换、图像二值化、以及边缘检测、轮廓检测以及掩码等等操作,下面我们一一介绍一下。
首先我们定义一个图像展示函数:
def cv_show(self,name,img):cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows()
这里不多过多解释,就是一个把图像展示出来的函数。
def convert_gray_scale(self,image):return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)这里是将图像转化为灰度图。
def select_rgb_white_yellow(self,image): #过滤掉背景lower = np.uint8([120, 120, 120])upper = np.uint8([255, 255, 255])white_mask = cv2.inRange(image, lower, upper)self.cv_show('white_mask',white_mask)masked = cv2.bitwise_and(image, image, mask = white_mask)self.cv_show('masked',masked)return masked
lower_red和高于upper_red的部分分别变成0,lower_red~upper_red之间的值变成255,相当于过滤背景相当于过滤掉一些无用的东西,就是说把灰度级低于120或者高于255的都设置成0,0也就是黑色,把120-255中间的都设置成白色。相当于一个二值化图像的操作。处理之后的图像如下图。

然后我们进行了一下边缘检测。都是OpenCV的一些形态学操作。
def detect_edges(self,image, low_threshold=50, high_threshold=200):return cv2.Canny(image, low_threshold, high_threshold)
这里是进行了一个边缘检测的结果。因为这里我们需要得到中间停车场的局部区域进行操作,所以我们需要进行一个提取感兴趣区间的一个操作。
def select_region(self,image):rows, cols = image.shape[:2]pt_1 = [cols*0.05, rows*0.90]pt_2 = [cols*0.05, rows*0.70]pt_3 = [cols*0.30, rows*0.55]pt_4 = [cols*0.6, rows*0.15]pt_5 = [cols*0.90, rows*0.15] pt_6 = [cols*0.90, rows*0.90]vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]], dtype=np.int32) point_img = image.copy() point_img = cv2.cvtColor(point_img, cv2.COLOR_GRAY2RGB)for point in vertices[0]:cv2.circle(point_img, (point[0],point[1]), 10, (0,0,255), 4)self.cv_show('point_img',point_img) return self.filter_region(image, vertices)
这里这几个点是根据自己的项目而言的,我们目的就是用这六个点把整个停车场框起来,然后对框出来的图像进行一个提取。也称之为一个ROI区域。结果是这样。

这里的坐标我们自己进行定位操作,然后我们制造一个掩码图像,就是把标记的这六个点规划成一个区域ROI region,然后把区域内设置成白色像素值,把区域外设置成全黑像素值。然后做一个相当于图像和掩码的与操作。得到的结果就是:
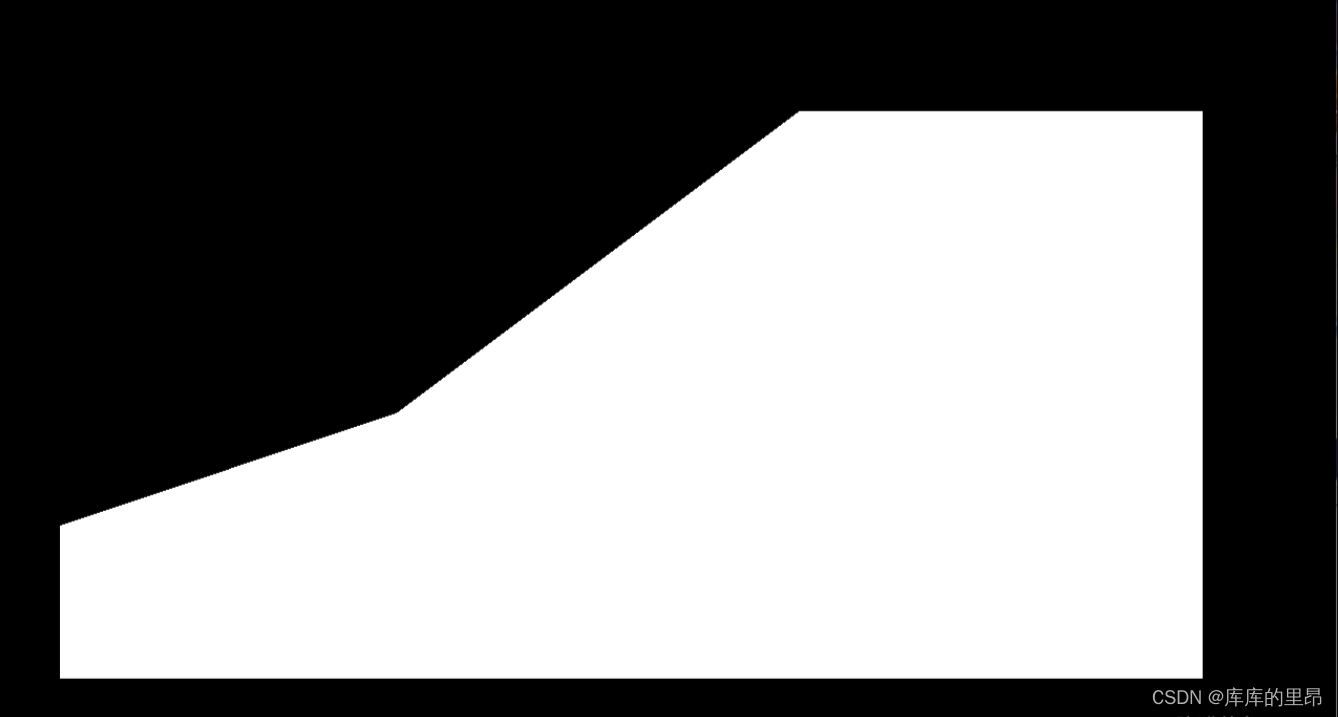
最后得到的ROI区域就是:
这里我们就得到了一个停车场的大致轮廓,然后我们开始对停车场车位进行具体操作,首先我们先要检测一个停车场直线的操作,使用霍夫直线检测来做这个项目。
def hough_lines(self,image): return cv2.HoughLinesP(image, rho=0.1, theta=np.pi/10, threshold=15, minLineLength=9, maxLineGap=4)
这里霍夫直线检测是定义好的一个模型,我们直接调用就可以。这里的参数我们介绍一下。
image:表示要处理的图像。
rho:表示处理的精度。精度越小检测的直线越精确,精度值设置的数值越大,那么检测的线段就越少。
theta:检测的直线角度,表示直线的角度不能超过哪个数值。如果超过这个阈值,就不定义为一条直线。
threshold:线的点定义阈值为15,这个要根据实施项目而定,构成线的像素点超过15才可以构成一条直线。
minLineLength:最小长度,这个不用过多解释,线的长度最小就是9.
maxLineGap:线和线之间最大的间隔阈值,离得多近的都认为是一条直线。
输入的图像需要是边缘检测后的结果,minLineLengh(线的最短长度,比这个短的都被忽略)和MaxLineCap(两条直线之间的最大间隔,小于此值,认为是一条直线)。rho距离精度,theta角度精度,threshod超过设定阈值才被检测出线段。
def draw_lines(self,image, lines, color=[255, 0, 0], thickness=2, make_copy=True):# 过滤霍夫变换检测到直线if make_copy:image = np.copy(image) cleaned = []for line in lines:for x1,y1,x2,y2 in line:if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:cleaned.append((x1,y1,x2,y2))cv2.line(image, (x1, y1), (x2, y2), color, thickness)print(" No lines detected: ", len(cleaned))return image
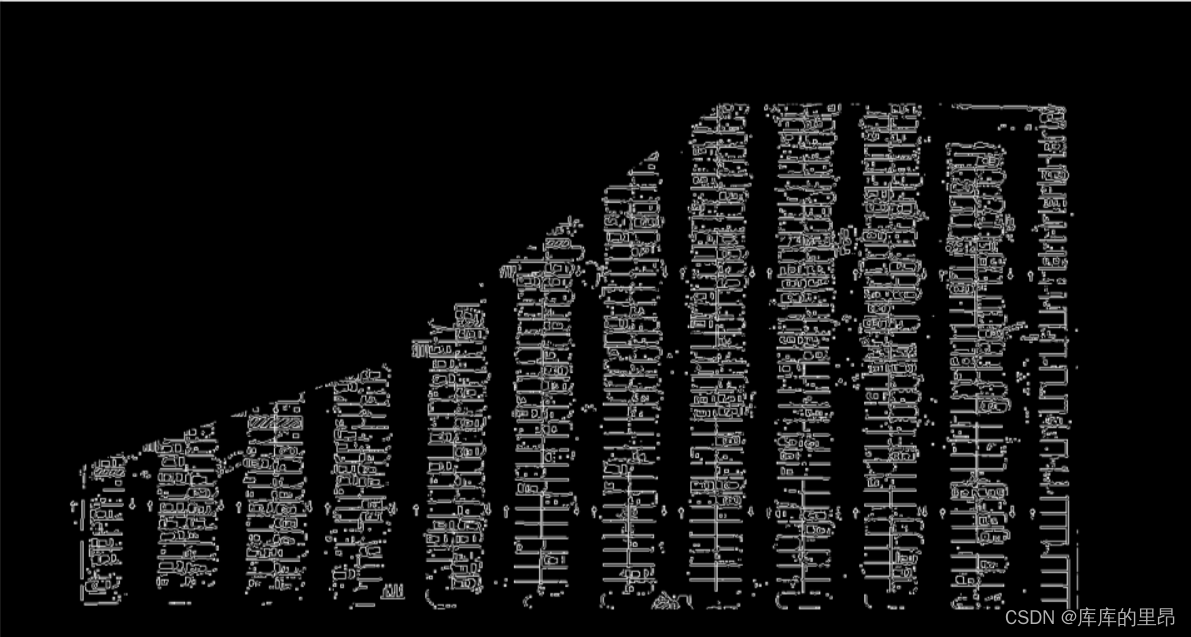
这里面对检测到的霍夫直线继续做一个过滤的操作,如果直线的长度大于25,小于55,我们就添加到列表当中,并且设定一条直线的左右端点坐标的差值不能超过1.这样的直线我们通通过滤出来。

这里检测的结果如图,这里因为车厂里有很多车,如果是一个空车场的话,检测的结果会非常好。做完检测之后,我们想要的是对于停车场的12列,我们对每一列都进行一个提取操作,比如我们得到12列之后,然后我们在对每一列分出具体的一个一个车位。然后对于第一列和第十二列这种单车位,和其他列的双车位的处理方法还是不同的,具体的我们来看一下。
def identify_blocks(self,image, lines, make_copy=True):if make_copy:new_image = np.copy(image)#Step 1: 过滤部分直线cleaned = []for line in lines:for x1,y1,x2,y2 in line:if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:cleaned.append((x1,y1,x2,y2))
首先我们还是过滤掉一些直线。
import operatorlist1 = sorted(cleaned, key=operator.itemgetter(0, 1))对于这十二列,每一列的左上角的坐标点我们是可以得到x1-x12的我们要对这些列进行一次排序操作。让计算机识别出哪一列是第一列,哪一列是第十二列。
clusters = {}dIndex = 0clus_dist = 10for i in range(len(list1) - 1):distance = abs(list1[i+1][0] - list1[i][0])if distance <= clus_dist:if not dIndex in clusters.keys(): clusters[dIndex] = []clusters[dIndex].append(list1[i])clusters[dIndex].append(list1[i + 1]) else:dIndex += 1
这里就是做了一下对于所有排序好的直线进行了一个归类操作,把哪些直线归为一列。并且进行添加。直到把每一列都进行分出来。
rects = {}i = 0for key in clusters:all_list = clusters[key]cleaned = list(set(all_list))#一列中的所有直线的坐标信息if len(cleaned) > 5:cleaned = sorted(cleaned, key=lambda tup: tup[1])#对直线进行排序avg_y1 = cleaned[0][1]#这个对于一列来说是固定的avg_y2 = cleaned[-1][1]#这个对于一列来说是固定的avg_x1 = 0avg_x2 = 0for tup in cleaned:avg_x1 += tup[0]avg_x2 += tup[2]avg_x1 = avg_x1/len(cleaned)avg_x2 = avg_x2/len(cleaned)rects[i] = (avg_x1, avg_y1, avg_x2, avg_y2)i += 1print("Num Parking Lanes: ", len(rects))
然后我们对每一列进行操作,把每一列的每一个车位的所有坐标信息提取出来。然后再通过得到的坐标及进行画出来这个矩形。
buff = 7#微调数值for key in rects:tup_topLeft = (int(rects[key][0] - buff), int(rects[key][1]))tup_botRight = (int(rects[key][2] + buff), int(rects[key][3]))cv2.rectangle(new_image, tup_topLeft,tup_botRight,(0,255,0),3)return new_image, rects
我们在这个期间又对矩形进行了手动微调。
def draw_parking(self,image, rects, make_copy = True, color=[255, 0, 0], thickness=2, save = True):if make_copy:new_image = np.copy(image)gap = 15.5#车位间的差距是15.5spot_dict = {} # 字典:一个车位对应一个位置tot_spots = 0#微调adj_y1 = {0: 20, 1:-10, 2:0, 3:-11, 4:28, 5:5, 6:-15, 7:-15, 8:-10, 9:-30, 10:9, 11:-32}adj_y2 = {0: 30, 1: 50, 2:15, 3:10, 4:-15, 5:15, 6:15, 7:-20, 8:15, 9:15, 10:0, 11:30}adj_x1 = {0: -8, 1:-15, 2:-15, 3:-15, 4:-15, 5:-15, 6:-15, 7:-15, 8:-10, 9:-10, 10:-10, 11:0}adj_x2 = {0: 0, 1: 15, 2:15, 3:15, 4:15, 5:15, 6:15, 7:15, 8:10, 9:10, 10:10, 11:0}for key in rects:tup = rects[key]x1 = int(tup[0]+ adj_x1[key])x2 = int(tup[2]+ adj_x2[key])y1 = int(tup[1] + adj_y1[key])y2 = int(tup[3] + adj_y2[key])cv2.rectangle(new_image, (x1, y1),(x2,y2),(0,255,0),2)num_splits = int(abs(y2-y1)//gap)for i in range(0, num_splits+1):y = int(y1 + i*gap)cv2.line(new_image, (x1, y), (x2, y), color, thickness)if key > 0 and key < len(rects) -1 : #竖直线x = int((x1 + x2)/2)cv2.line(new_image, (x, y1), (x, y2), color, thickness)# 计算数量if key == 0 or key == (len(rects) -1):tot_spots += num_splits +1else:tot_spots += 2*(num_splits +1)# 字典对应好if key == 0 or key == (len(rects) -1):for i in range(0, num_splits+1):cur_len = len(spot_dict)y = int(y1 + i*gap)spot_dict[(x1, y, x2, y+gap)] = cur_len +1 else:for i in range(0, num_splits+1):cur_len = len(spot_dict)y = int(y1 + i*gap)x = int((x1 + x2)/2)spot_dict[(x1, y, x, y+gap)] = cur_len +1spot_dict[(x, y, x2, y+gap)] = cur_len +2 print("total parking spaces: ", tot_spots, cur_len)if save:filename = 'with_parking.jpg'cv2.imwrite(filename, new_image)return new_image, spot_dict
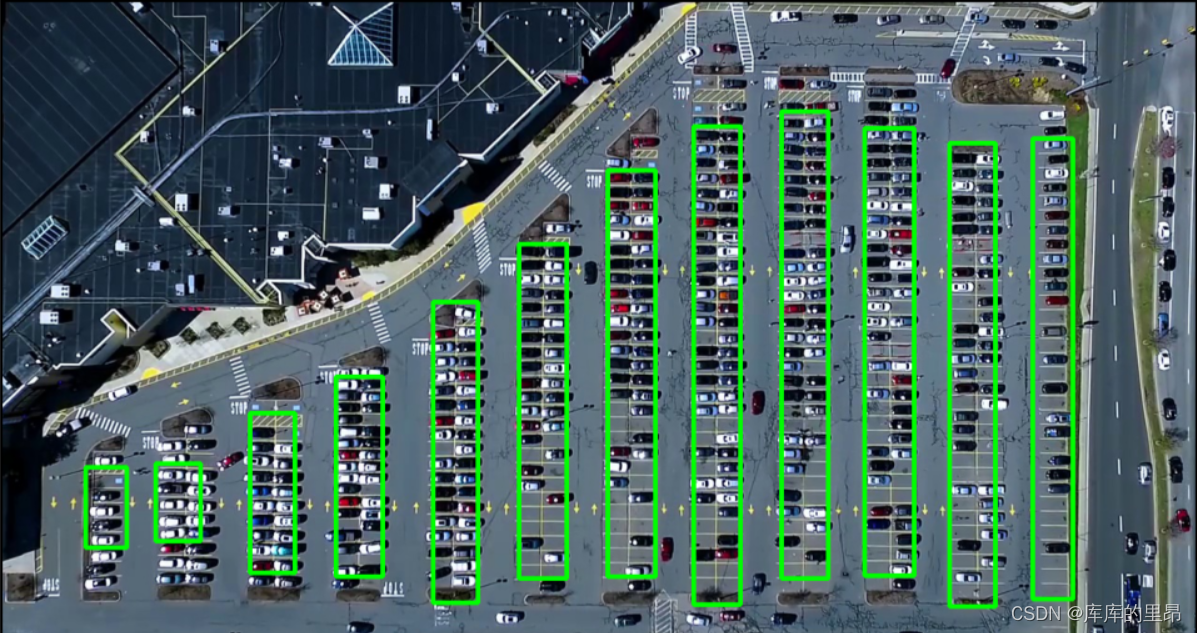
处理的结果是:

这里我们把所有车位都划分出来了。
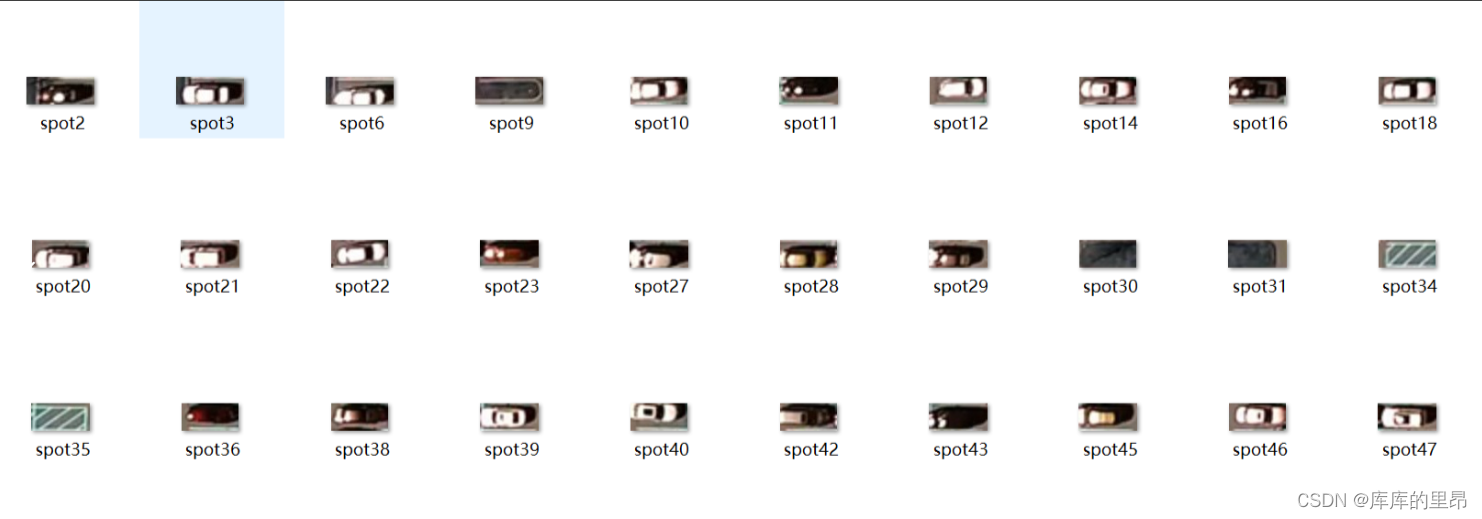
然后我们想要通过使用keras神经网络对车位有没有车进行一个学习!让神经网络预测到底车位到底有没有车。整个keras神经网络的训练过程如下。我们使用的是VGG16网络进行训练做一个二分类的任务,也就是车位有没有车。对于车位的训练图像我们可以看一下。通过这一代码我们对车位有无车进行提取。
def save_images_for_cnn(self,image, spot_dict, folder_name ='cnn_data'):for spot in spot_dict.keys():(x1, y1, x2, y2) = spot(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))#裁剪spot_img = image[y1:y2, x1:x2]spot_img = cv2.resize(spot_img, (0,0), fx=2.0, fy=2.0) spot_id = spot_dict[spot]filename = 'spot' + str(spot_id) +'.jpg'print(spot_img.shape, filename, (x1,x2,y1,y2))cv2.imwrite(os.path.join(folder_name, filename), spot_img)
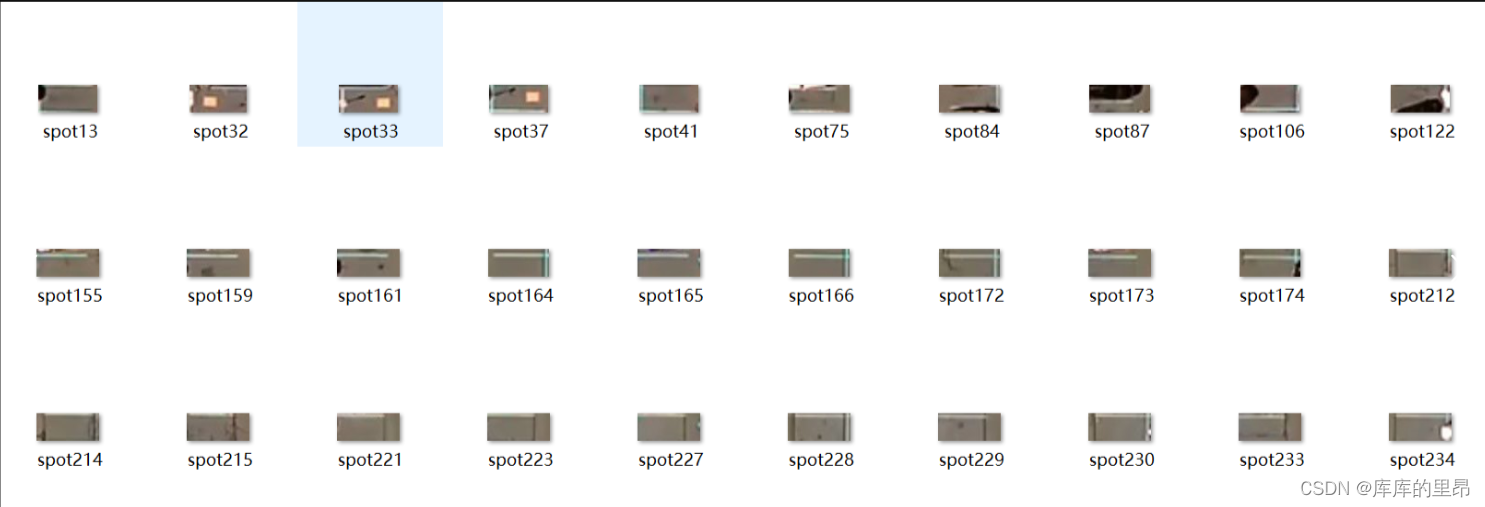
这里是车位没有车,那么有车的如下。
files_train = 0
files_validation = 0cwd = os.getcwd()
folder = 'train_data/train'
for sub_folder in os.listdir(folder):path, dirs, files = next(os.walk(os.path.join(folder,sub_folder)))files_train += len(files)folder = 'train_data/test'
for sub_folder in os.listdir(folder):path, dirs, files = next(os.walk(os.path.join(folder,sub_folder)))files_validation += len(files)print(files_train,files_validation)img_width, img_height = 48, 48
train_data_dir = "train_data/train"
validation_data_dir = "train_data/test"
nb_train_samples = files_train
nb_validation_samples = files_validation
batch_size = 32
epochs = 15
num_classes = 2model = applications.VGG16(weights='imagenet', include_top=False, input_shape = (img_width, img_height, 3))for layer in model.layers[:10]:layer.trainable = Falsex = model.output
x = Flatten()(x)
predictions = Dense(num_classes, activation="softmax")(x)model_final = Model(input = model.input, output = predictions)model_final.compile(loss = "categorical_crossentropy", optimizer = optimizers.SGD(lr=0.0001, momentum=0.9), metrics=["accuracy"]) train_datagen = ImageDataGenerator(
rescale = 1./255,
horizontal_flip = True,
fill_mode = "nearest",
zoom_range = 0.1,
width_shift_range = 0.1,
height_shift_range=0.1,
rotation_range=5)test_datagen = ImageDataGenerator(
rescale = 1./255,
horizontal_flip = True,
fill_mode = "nearest",
zoom_range = 0.1,
width_shift_range = 0.1,
height_shift_range=0.1,
rotation_range=5)train_generator = train_datagen.flow_from_directory(
train_data_dir,
target_size = (img_height, img_width),
batch_size = batch_size,
class_mode = "categorical")validation_generator = test_datagen.flow_from_directory(
validation_data_dir,
target_size = (img_height, img_width),
class_mode = "categorical")checkpoint = ModelCheckpoint("car1.h5", monitor='val_acc', verbose=1, save_best_only=True, save_weights_only=False, mode='auto', period=1)
early = EarlyStopping(monitor='val_acc', min_delta=0, patience=10, verbose=1, mode='auto')history_object = model_final.fit_generator(
train_generator,
samples_per_epoch = nb_train_samples,
epochs = epochs,
validation_data = validation_generator,
nb_val_samples = nb_validation_samples,
callbacks = [checkpoint, early])
这里我们使用了卷积神经网络对有无车位进行训练,通过神经网络的训练我们就开始对一帧图像进行判断。得到的结果是:
def make_prediction(self,image,model,class_dictionary):#预测#预处理img = image/255.#转换成4D tensorimage = np.expand_dims(img, axis=0)# 用训练好的模型进行训练class_predicted = model.predict(image)inID = np.argmax(class_predicted[0])label = class_dictionary[inID]return labeldef predict_on_image(self,image, spot_dict , model,class_dictionary,make_copy=True, color = [0, 255, 0], alpha=0.5):if make_copy:new_image = np.copy(image)overlay = np.copy(image)self.cv_show('new_image',new_image)cnt_empty = 0all_spots = 0for spot in spot_dict.keys():all_spots += 1(x1, y1, x2, y2) = spot(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))spot_img = image[y1:y2, x1:x2]spot_img = cv2.resize(spot_img, (48, 48)) label = self.make_prediction(spot_img,model,class_dictionary)if label == 'empty':cv2.rectangle(overlay, (int(x1),int(y1)), (int(x2),int(y2)), color, -1)cnt_empty += 1cv2.addWeighted(overlay, alpha, new_image, 1 - alpha, 0, new_image)cv2.putText(new_image, "Available: %d spots" %cnt_empty, (30, 95),cv2.FONT_HERSHEY_SIMPLEX,0.7, (255, 255, 255), 2)cv2.putText(new_image, "Total: %d spots" %all_spots, (30, 125),cv2.FONT_HERSHEY_SIMPLEX,0.7, (255, 255, 255), 2)save = Falseif save:filename = 'with_marking.jpg'cv2.imwrite(filename, new_image)self.cv_show('new_image',new_image)return new_image
这里做了一个在图像中训练的结果,我们来看一下。

预测结果是一共检测到555个车位,目前空闲车位一共有113个。然后我们对视频进行相同的操作,主要就是把视频进行分割成一帧一帧的图像,然后对每一帧图像进行下面对于图片的操作。这样我们就可以以视频流的形式进行输出了!这就是整个项目的流程。

这里就是利用keras卷积神经网络一直对图像进行训练测试,得到实时的车位信息。至此我们的这个项目就结束了。针对车来车往的停车场内停车效率问题提出了基于OpenCV的停车位空闲状态检测的方法,以视频中的每帧图像为单位,使用灰度化、霍夫直线检测等方法对数据进行预处理、最后将处理完的数据利用Keras神经网络模型训练和预测,来判断停车位中是否空闲。测试结果显示此方法可以快速完成实时监测停车场内车位状态的任务。来提高停车场内停车的效率,但由于停车场内的停车标位线存在维护不及时,仍然会存在停车位标线不清晰、遮挡严重等问题,会影响检测精度。虽然在图像预处理已经减少了计算量,但计算次数多、程序处理耗时长,后续将针对文中的不足进行进一步的研究与改进。在未来的研究工作中可以在图像预处理进程中计算量大的问题上尝试使用更快速的算法来进一步提高此方法耗时长的问题。

如果觉得博主的文章还不错或者您用得到的话,可以免费的关注一下博主,如果三连收藏支持就更好啦!这就是给予我最大的支持!
相关文章:
【opencv】计算机视觉:停车场车位实时识别
目录 目标 整体流程 背景 详细讲解 目标 我们想要在一个实时的停车场监控视频中,看看要有多少个车以及有多少个空缺车位。然后我们可以标记空的,然后来车之后,实时告诉应该停在那里最方便、最近!!!实现…...
:FFmpeg与SDL环境配置)
播放器开发(三):FFmpeg与SDL环境配置
学习课题:逐步构建开发播放器【QT5 FFmpeg6 SDL2】 环境配置 我这边的是使用macOS;IDE用的是CLion;CMake构建,除了创建项目步骤、CMakeLists文件有区别之外的代码层面不会有太大区别。 配置上只添加一下CMakeLists中FFmpeg和SD…...
KubeVela核心控制器原理浅析
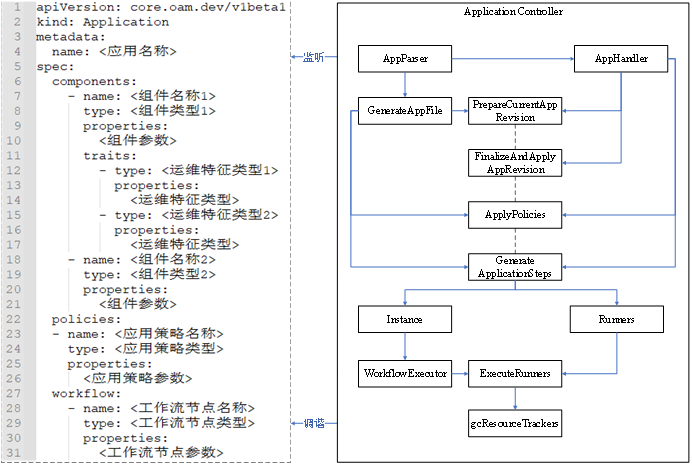
前言 在学习 KubeVela 的核心控制器之前,我们先简单了解一下 KubeVela 的相关知识。 KubeVela 本身是一个应用交付与管理控制平面,它架在 Kubernetes 集群、云平台等基础设施之上,通过开放应用模型来对组件、云服务、运维能力、交付工作流进…...

迎接“全全闪”时代 XSKY星辰天合发布星海架构和星飞产品
11 月 17 日消息,北京市星辰天合科技股份有限公司(简称:XSKY星辰天合)在北京首钢园举办了主题为“星星之火”的 XSKY 星海全闪架构暨星飞存储发布会。 (图注:XSKY星辰天合 CEO 胥昕) XSKY星辰天…...

[架构相关]基础架构设计原则
基础架构设计原则 文章目录 基础架构设计原则一、可用性(Availability)1.1、引入冗余1.2、负载均衡1.3、故障转移1.4、备份和恢复策略 二、可扩展性(Scalability)2.1 水平扩展2.2 垂直扩展2.3 弹性扩展 三、可靠性(Rel…...

测试在 Oracle 下直接 rm dbf 数据文件并重启数据库
创建一个新的表空间并创建新的用户,指定新表空间为新用户的默认表空间 create tablespace zzw datafile /oradata/cesdb/zzw01.dbf size 10m;zzw用户已经创建过,这里修改其默认表空间 alter user zzw quota unlimited on zzw; alter user zzw default …...

【开源】基于JAVA的计算机机房作业管理系统
项目编号: S 017 ,文末获取源码。 \color{red}{项目编号:S017,文末获取源码。} 项目编号:S017,文末获取源码。 目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 登录注册模块2.2 课程管理模块2.3 课…...

Ubuntu 配置静态 IP
Ubuntu 18 开始可以使用netplan配置网络。配置文件位于/etc/netplan/xxx.yaml中,netplan默认是使用NetworkManager来配置网卡信息的。 修改配置文件: 1、打开文件编辑:sudo vi 01-network-manager-all.yaml原文件内容如下:netwo…...

Spring Cloud实战 |分布式系统的流量控制、熔断降级组件Sentinel如何使用
专栏集锦,大佬们可以收藏以备不时之需 Spring Cloud实战专栏:https://blog.csdn.net/superdangbo/category_9270827.html Python 实战专栏:https://blog.csdn.net/superdangbo/category_9271194.html Logback 详解专栏:https:/…...
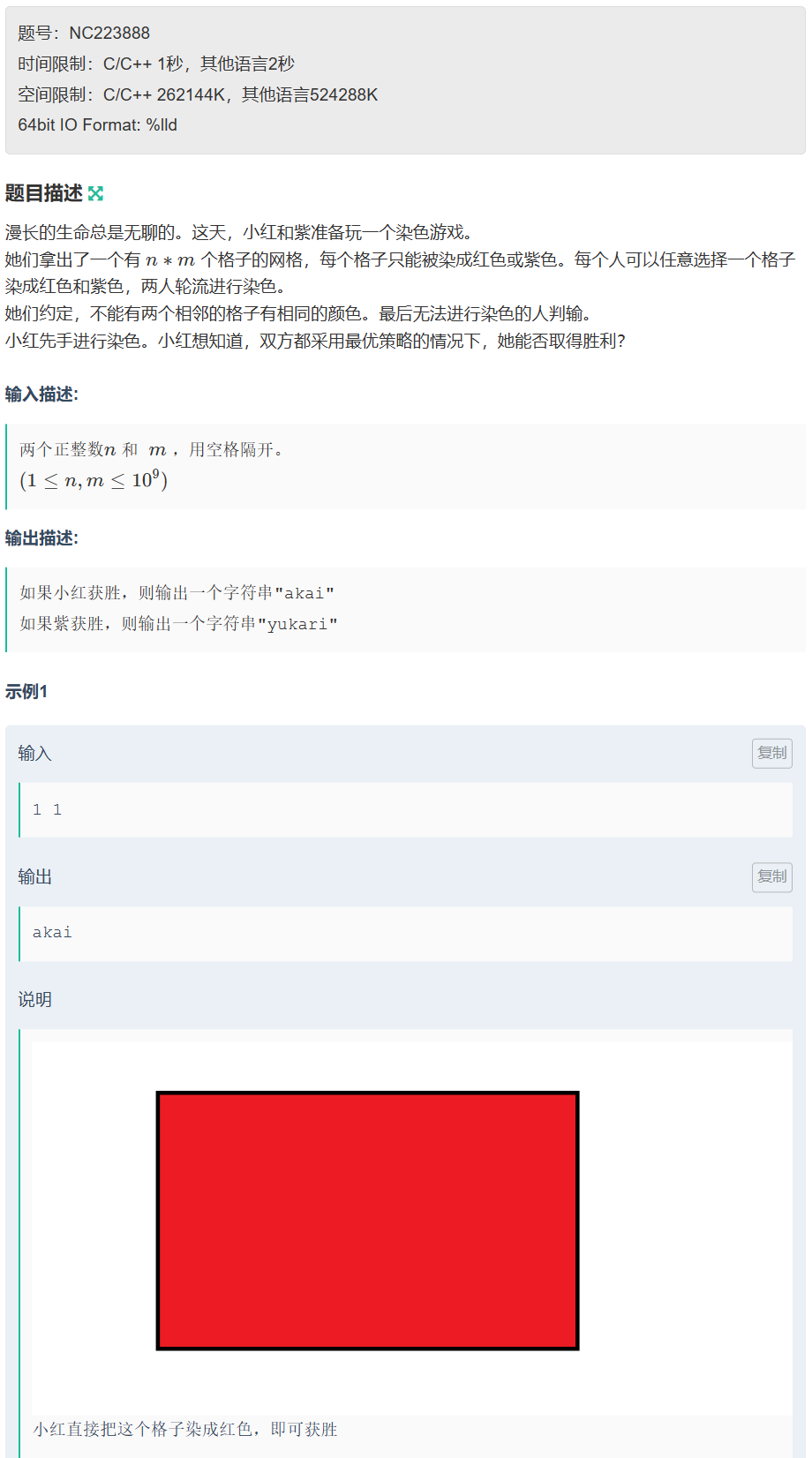
第六届 传智杯初赛B组
文章目录 A. 字符串拼接🍻 AC code B. 最小差值🍻 AC code C. 红色和紫色🍻 AC code D. abb🍻 AC code E. kotori和素因子🍻 AC code F. 红和蓝🍻 AC code 🥰 Tips:AI可以把代码从 j…...
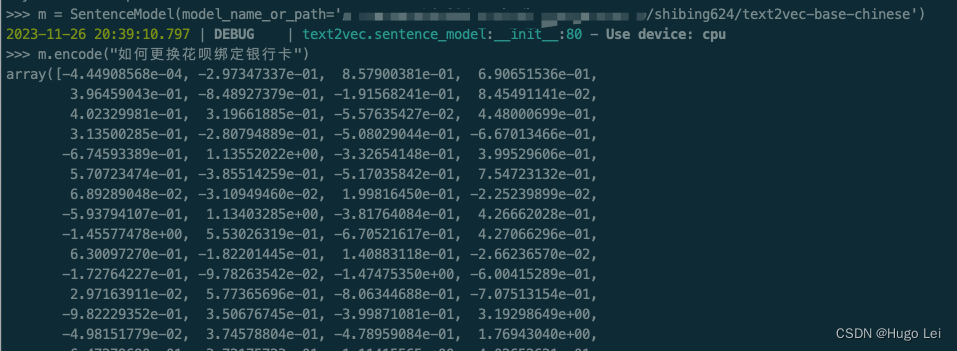
文档向量化工具(二):text2vec介绍
目录 前言 text2vec开源项目 核心能力 文本向量表示模型 本地试用 安装依赖 下载模型到本地(如果你的网络能直接从huggingface上拉取文件,可跳过) 运行试验代码 前言 在上一篇文章中介绍了,如何从不同格式的文件里提取…...

vscode中pylance无法显示outline无法跳转
当打开的workspce中有较多的文件时,pylance需要分析的文件太多,导致卡住,无法分析到对应的python文件 常见的情况是,当我们在workspace中包含了data文件夹(通常是通过软连接方式把数据集链接过来)…...

番外篇之通讯录
前言:用到的知识点有枚举、结构体、数组,快速排序(用的名字排序) 下面是测试函数: test.c #define _CRT_SECURE_NO_WARNINGS 1 #include"contact.h" void menu() {printf("*************************…...
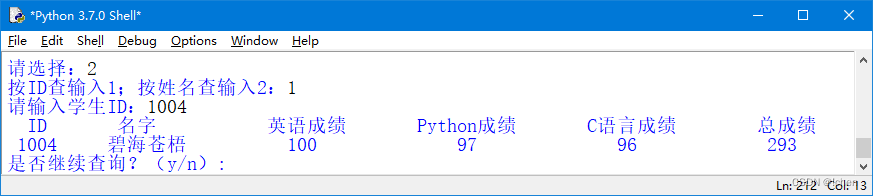
学生信息管理系统程序Python
系统主界面 在该界面中可以选择要使用功能对应的菜单进行不同的操作。在选择功能菜单时,有两种方法, 一种是输入1,另一种是按下键盘上的↑或↓方向键进行选择。这两种方法的结果是一样的,所以使用哪种方法都可以。 (…...

[js] for forEach for of 循环里await关键字的用法
1、for:循环中使用await的写法(生效) async function loop(){for( let i0; i<array.length; i ){let datas await getDatas()break} }2、forEach:循环中使用await的写法(不生效): array.f…...
Linux面试题(二)
目录 17、怎么使一个命令在后台运行? 18、利用 ps 怎么显示所有的进程? 怎么利用 ps 查看指定进程的信息? 19、哪个命令专门用来查看后台任务? 20、把后台任务调到前台执行使用什么命令?把停下的后台任务在后台执行起来用什么命令? 21、终止进程用什么命令…...
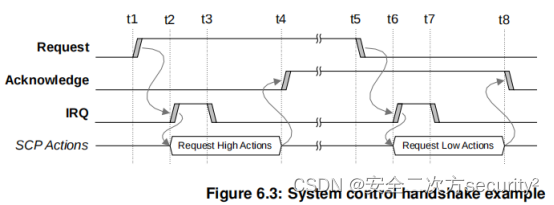
电源控制系统架构(PCSA)之系统控制处理器组件
目录 6.4 系统控制处理器 6.4.1 SCP组件 SCP处理器Core SCP处理器Core选择 SCP处理器核内存 系统计数器和通用计时器 看门狗 电压调节器控制 时钟控制 系统控制 信息接口 电源策略单元 传感器控制 外设访问 系统访问 6.4 系统控制处理器 系统控制处理器(SCP)是…...

《已解决: ImportError: Keras requires TensorFlow 2.2 or higher 问题》
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页: 🐅🐾猫头虎的博客🎐《面试题大全专栏》 🦕 文章图文并茂🦖…...
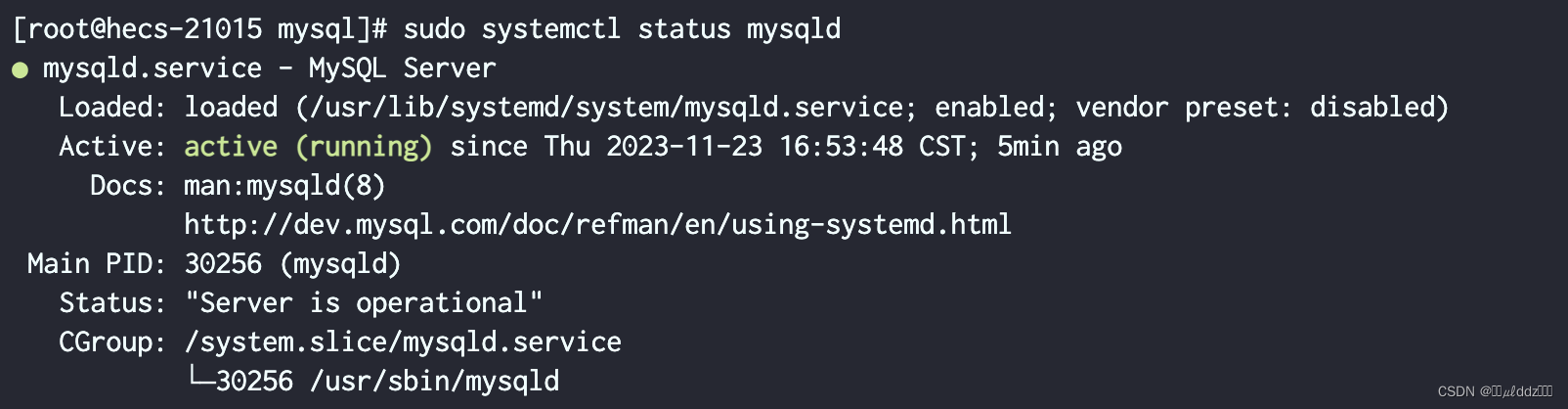
在 CentOS 7 上安装 MySQL 8
在 CentOS 7 上安装 MySQL 8 步骤 1: 添加 MySQL Yum 存储库 首先,我们需要添加 MySQL Yum 存储库。打开终端并执行以下命令: sudo yum install -y https://repo.mysql.com/mysql80-community-release-el7-3.noarch.rpm步骤 2: 导入 MySQL GPG 公钥 …...

从二极管到linux服务器
软件设计: os: 批处理系统: 轮询系统:单片机裸机开发 实时系统:ucosii,rtos,rt-thread、风和系统、liteos(主要是海思系列soc在用)等 非实时系统:linux 对os任务切换时寄存器的功能有理解。 对ipc机制有理解。 bsp: 需要对寄存器、单片机内部总线、iic、spi、uart、c…...

SO-ARM100机械臂Feetech舵机控制SDK独立封装实战
1. 为什么需要独立封装Feetech舵机控制SDK 当你第一次拿到SO-ARM100机械臂时,可能会直接使用LeRobot框架进行控制。这个框架确实提供了完整的解决方案,但就像带着整个工具箱去拧一颗螺丝——过度依赖框架会导致几个实际问题: 依赖臃肿&#x…...

别再只用VSCode了!用ACEeditor在Vue/React项目中快速搭建一个在线代码编辑器
深度整合ACEeditor:现代前端框架中的高性能代码编辑器解决方案 在当今快速发展的前端开发生态中,代码编辑器的集成已成为许多应用的核心需求。无论是构建在线IDE、教学平台还是需要内嵌代码编辑功能的SaaS产品,开发者都面临着一个关键选择&am…...

2026年AIGC降重网站推荐,免费论文查重/Writepass/万方查重/AIGC降重,AIGC降重网站哪个好
在当今学术和创作领域,原创性和效率是至关重要的因素。随着AIGC(人工智能生成内容)技术的快速发展,抄袭和重复内容的问题日益凸显。AIGC降重技术应运而生,它利用先进的算法和大数据资源,能够精准识别文本中…...

Linux内核中的热插拔详解
Linux内核中的热插拔详解 引言 热插拔(Hotplug)是Linux内核中的一项重要功能,它允许在系统运行时动态添加或移除硬件设备,无需重启系统。热插拔技术大大提高了系统的灵活性和可用性,广泛应用于服务器、工作站和嵌入式系…...

混合型MMC多电平整流侧仿真研究:电压电流双闭环控制与环流抑制策略的实现
混合型MMC多电平,整流侧仿真,加入了电压电流双闭环,环流抑制,子模块电容电压均压控制,采用载波移相调制 PS:仿真搭建不易,仅一个仿真最近在实验室熬了几个通宵,终于搞定了混合型MMC多…...

LFM2.5-1.2B-Thinking-GGUF应用场景:快速生成产品介绍与文案
LFM2.5-1.2B-Thinking-GGUF应用场景:快速生成产品介绍与文案 1. 为什么选择LFM2.5-1.2B-Thinking生成商业文案 在电商和营销领域,每天需要产出大量产品介绍、广告文案和社交媒体内容。传统人工撰写方式不仅耗时耗力,还难以保持风格一致性。…...
:(一). 游戏设计与规则解析)
Pygame 实战(单机版桌游模拟):(一). 游戏设计与规则解析
1. 为什么选择Pygame开发桌游模拟器 作为一个玩了十几年桌游的老玩家,我一直想把那些经典的桌面游戏搬到电脑上。去年开始接触Pygame后,发现这个框架简直就是为桌游模拟量身定制的。它轻量级、易上手,最重要的是完全免费开源。我用它做过狼人…...

我不是在用 AI 助手,我在把自己的能力沉淀成组织资产暗
1. 什么是 Apache SeaTunnel? Apache SeaTunnel 是一个非常易于使用、高性能、支持实时流式和离线批处理的海量数据集成平台。它的目标是解决常见的数据集成问题,如数据源多样性、同步场景复杂性以及资源消耗高的问题。 核心特性 丰富的数据源支持&#…...

YimMenu终极指南:5步掌握GTA5最强免费防崩溃辅助工具
YimMenu终极指南:5步掌握GTA5最强免费防崩溃辅助工具 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/YimMe…...

类器官:十五五规划下的“人体替身“革命
3月10日,《中华人民共和国国民经济和社会发展第十五个五年规划纲要(草案)》正式对外公布并提请全国人大审议。值得关注的是,类器官与器官芯片技术首次被提升至国家战略高度——在"专栏8 前沿科技攻关"的"生命科学与…...