机器人规划算法——movebase导航框架源码分析
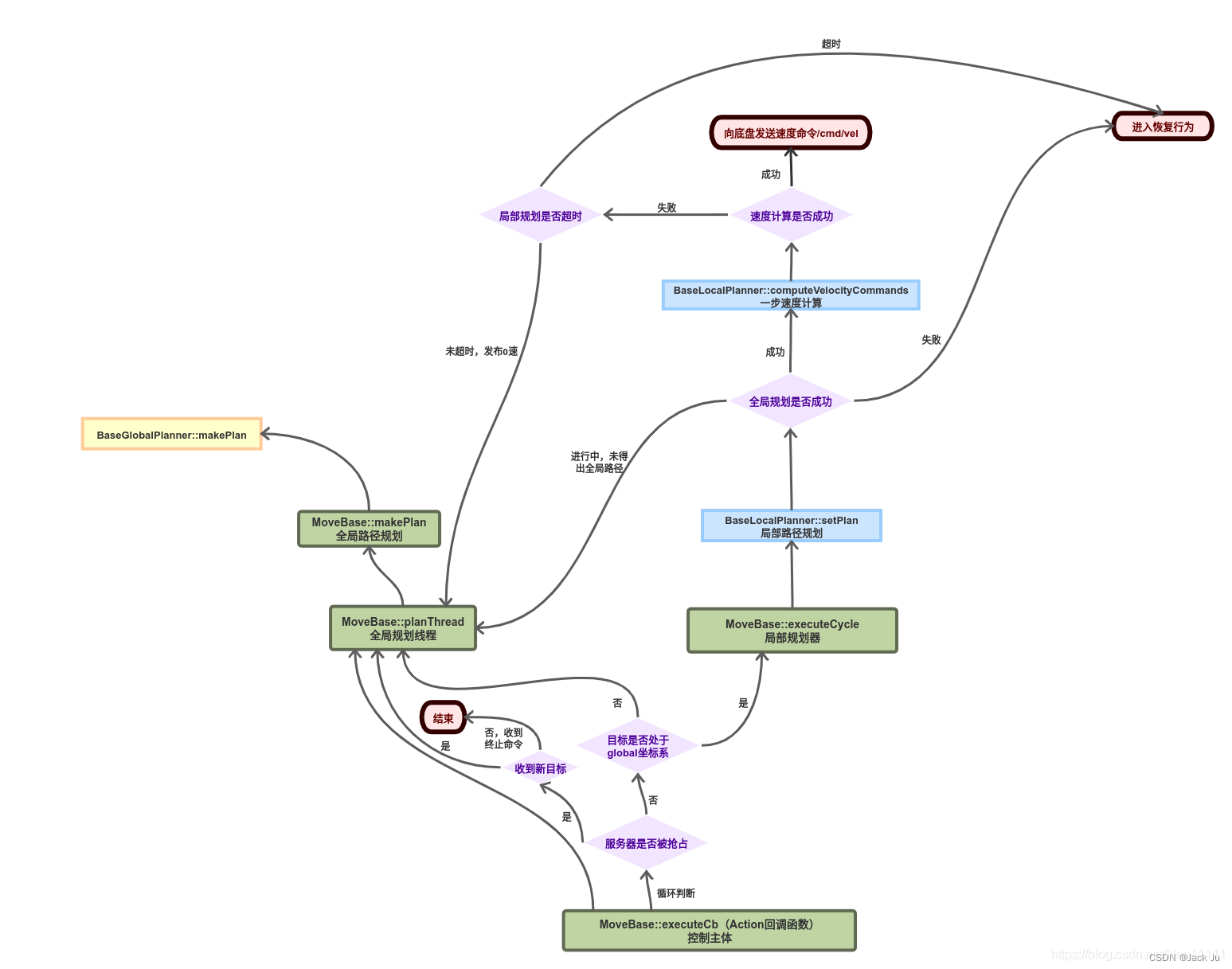
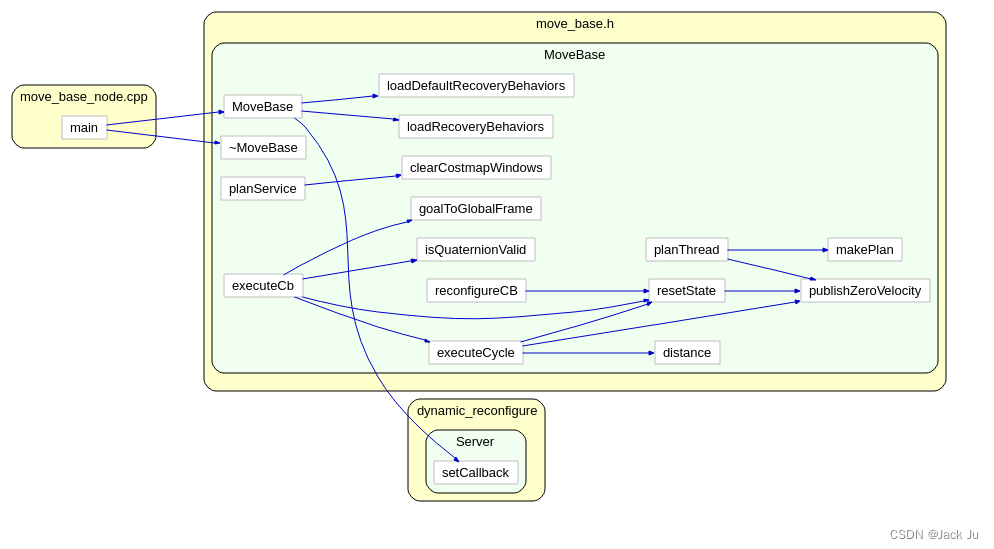
这里对MoveBase类的类成员进行了声明,以下为比较重要的几个类成员函数。
- 构造函数 MoveBase::MoveBase | 初始化Action 控制主体 MoveBase::executeCb
- 收到目标,触发全局规划线程,循环执行局部规划 全局规划线程 void MoveBase::planThread | 调用全局规划
- 全局规划 MoveBase::makePlan | 调用全局规划器类方法,得到全局规划路线 局部规划
- MoveBase::executeCycle | 传入全局路线,调用局部规划器类方法,得到速度控制指令
1.MoveBase的构造函数
以下是MoveBase的构造函数,为了方便本文的写作,我将它的语句顺序做了适当的调整,不影响整个系统的运行。如下面的代码片段所示,在一开始对一系列的成员变量赋予了初值:
tf_是坐标变换TF2的接口对象;
as_则是Action服务器;
planner_costmap_ros_是用于全局规划器的代价地图对象;
controller_costmap_ros_则是局部规划器所用的代价地图对象;
bgp_loader_是装载全局规划器插件的工具;
blp_loader_是装载局部规划器插件的工具;
planner_plan_, latest_plan_ 和controller_plan_是三个记录规划结果的缓存;
runPlanner_, setup_, p_freq_change_, c_freq_change_, new_global_plan_则是一些控制和反映MoveBase系统状态的布尔变量。
MoveBase::MoveBase(tf2_ros::Buffer& tf) :tf_(tf), as_(NULL), planner_costmap_ros_(NULL), controller_costmap_ros_(NULL),bgp_loader_("nav_core", "nav_core::BaseGlobalPlanner"),blp_loader_("nav_core", "nav_core::BaseLocalPlanner"), recovery_loader_("nav_core", "nav_core::RecoveryBehavior"),planner_plan_(NULL), latest_plan_(NULL), controller_plan_(NULL),runPlanner_(false), setup_(false), p_freq_change_(false), c_freq_change_(false), new_global_plan_(false)
在构造函数的一开始,定义了两个ROS的句柄,用于获取节点参数,订阅和发布主题。以下面的第13和14行为例,MoveBase从参数服务器中获取了全局规划器和局部规划器的名称, 如果系统中没有定义这些参数,将以默认值"navfn/NavfnROS"和"base_local_planner/TrajectoryPlannerROS"完成初始化工作。还有很多其它参数需要配置,这里不再一一介绍。
ros::NodeHandle private_nh("~");ros::NodeHandle nh;std::string global_planner, local_planner;private_nh.param("base_global_planner", global_planner, std::string("navfn/NavfnROS"));private_nh.param("base_local_planner", local_planner, std::string("base_local_planner/TrajectoryPlannerROS"));// 省略其它加载参数的语句
然后,构建了轨迹规划结果缓存planner_plan_, latest_plan_和controller_plan_。并且创建了一个线程planner_thread_用于轨迹规划。
planner_plan_ = new std::vector();latest_plan_ = new std::vector();controller_plan_ = new std::vector();planner_thread_ = new boost::thread(boost::bind(&MoveBase::planThread, this));
具体可参见文章move_base
Reference
1.Navigation Move_Base代码阅读
相关文章:
机器人规划算法——movebase导航框架源码分析
这里对MoveBase类的类成员进行了声明,以下为比较重要的几个类成员函数。 构造函数 MoveBase::MoveBase | 初始化Action 控制主体 MoveBase::executeCb收到目标,触发全局规划线程,循环执行局部规划 全局规划线程 void MoveBase::planThread |…...
)
Android:Google三方库之Firebase集成详细步骤(三)
Cloud Messaging 1、清单文件配置 a、(可选)一项扩展 FirebaseMessagingService 的服务。除了接收通知外,如果您还希望在后台应用中进行消息处理,则必须添加此服务。例如,您需要在前台应用中接收通知、接收数据载荷以及…...
2023年中国边缘计算网关现状及发展趋势分析[图]
边缘计算网关是一种可以在设备上运行本地计算、消息通信、数据缓存等功能的工业智能网关,可以在无需联网的情况下实现设备的本地联动以及数据处理分析。边缘计算网关是一种连接物联网设备和云端服务的关键技术,它可以在设备和云端之间建立一个安全、高效…...
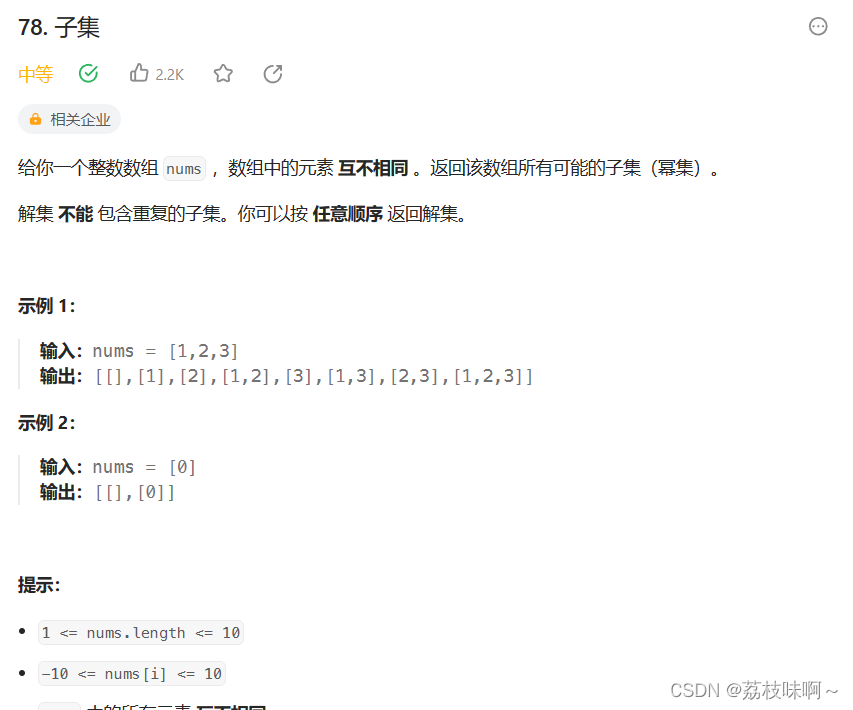
LeetCode78.子集
这道题如果用暴力法几乎是不可能解出来的,因为情况太复杂了,但是一旦用上递归回溯就会轻松很多,先上代码: class Solution {List<List<Integer>> result new ArrayList<List<Integer>>();List<Integ…...

不是默认进入Linux|总是自动进入windows系统
问题描述 不是默认进入Linux系统无法主动出现boot引导自动进入windows系统 尝试无效 修复引导无效重装Grub无效重装系统无效 环境 Ubuntu 22.04 LST微星主板 解决方案 修改引导顺序: 开机狂按Del键,进入BIOS系统,左侧Settings 设置&…...
)
【面经八股】搜广推方向:常见面试题(二)
【面经&八股】搜广推方向:常见面试题(二) 文章目录 【面经&八股】搜广推方向:常见面试题(二)1. FTRL 是什么?(Follow The Regularized Leader)2. 梯度下降方法3. 推荐系统中常见的Embedding方法有哪些?4. Embedding与推荐系统有哪些结合5. FM 和 FFM6. FNN7. 深…...

机器学习与药物筛选的心得体会
机器学习在药物设计里面的应用可以说还是比较常见的,尤其是搞计算的都会或多或少的涉及到这块。比如国内做这块比较多的,浙江大学的侯廷军教授,北京化工大学的闫爱霞教授,华东理工大学的几个做模拟计算的老师,上海药物…...

初识数据结构
归纳编程学习的感悟, 记录奋斗路上的点滴, 希望能帮到一样刻苦的你! 如有不足欢迎指正! 共同学习交流! 🌎欢迎各位→点赞 👍 收藏⭐ 留言📝 熬过了我们不想要的生活…...
【阿里云】图像识别 智能分类识别 增加网络控制功能点(三)
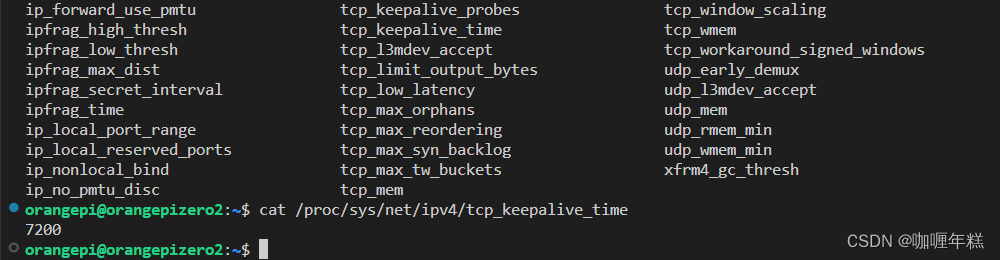
一、增加网络控制功能 实现需求TCP 心跳机制解决Soket异常断开问题 二、Linux内核提供了通过sysctl命令查看和配置TCP KeepAlive参数的方法。 查看当前系统的TCP KeepAlive参数修改TCP KeepAlive参数 三、C语言实现TCP KeepAlive功能 四、setsockopt用于设置套接字选项的系…...

LeetCode 统计美丽子字符串 II【质因子分解,前缀和,哈希表】困难
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...

第一百八十一回 如何绘制阴影效果
文章目录 1. 概念介绍2. 使用方法2.1 SegmentedButton2.2 ButtonSegment 3. 代码与效果3.1 示例代码3.2 运行效果 4. 内容总结 1. 概念介绍 我们在本章回中介绍的SegmentedButton组件是一种分段式按钮,它把多个按钮连接成一组显示,组内再对不同的按钮进…...
Qt5.15.2静态编译 VS2017 with static OpenSSL
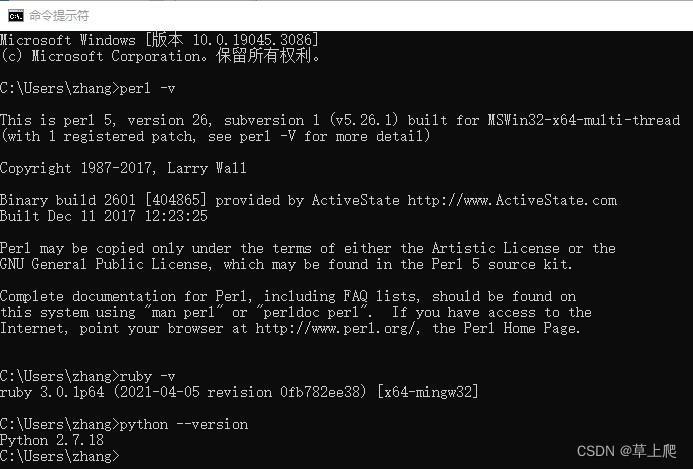
几年前编译过一次Qt静态库:VS2015编译Qt5.7.0生成支持XP的静态库,再次编译,毫无压力。 一.环境 系统:Windows 10 专业版 64位 编译器:visual studio 2017 第三方工具:perl,ruby和python python用最新的3.x.x版本也是可以的 这三个工具都需要添加到环境变量,安装时勾选…...
试用 13 -- 数据时效性)
AIGC(生成式AI)试用 13 -- 数据时效性
数据时效性? 最新的数据,代表最新的状态,使用最新的数据也应该最有说服力。 学习需要时间,AIGC学习并接收最新数据的效果如何? 问题很简单,如何验证?这个需要找点更新快的对像进行验证。…...

Sass的嵌套CSS 规则详细教程
文章目录 前言父选择器的标识符&群组选择器的嵌套子组合选择器和同层组合选择器:>、和~嵌套属性后言 前言 hello world欢迎来到前端的新世界 😜当前文章系列专栏:Sass和Less 🐱👓博主在前端领域还有很多知识和…...
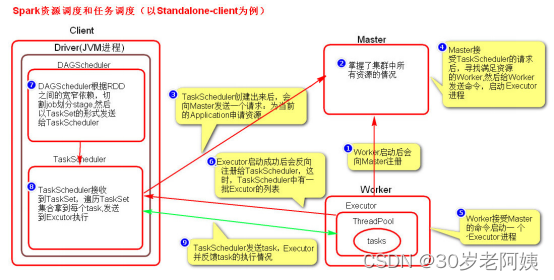
Spark---SparkCore(一)
一、术语与宽窄依赖 1、术语解释 1、Master(standalone):资源管理的主节点(进程) 2、Cluster Manager:在集群上获取资源的外部服务(例如:standalone,Mesos,Yarn) 3、Worker Node(standalone):资源管理的从节点(进程)或者说管理本机资源的…...

单链表原来是这样实现的!
文章目录 前言1. 链表的概念及结构1.1在链表里,每节“车厢”是什么样的呢?1.2为什么还需要指针变量来保存下⼀个节点的位置? 2. 单链表的实现1. 定义结构体(Seqlist)2. 打印函数(SLTPrint)小插曲,创建节点函数CreateNode3. 尾插函…...
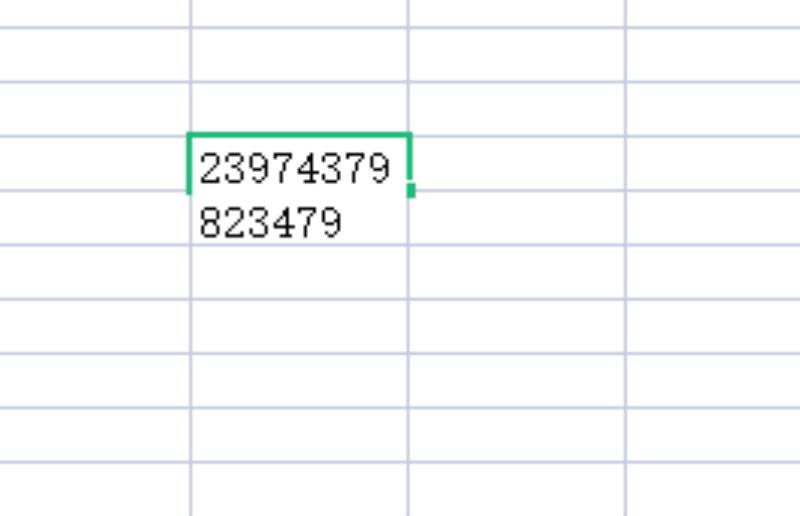
excel一个单元格换行方法
要是在同一个单元格内输入文字输入不下的话,我们是可以进行同一个单元格换行设置的,而且换行的方法也是有很多种,下面我们就一起来看一下有哪些方法吧。 excel一个单元格换行方法: 方法一: 1、我们可以直接按下alte…...
echart一键生成迁徙图
echart_move 介绍 echart迁徙图,选择起点和目的地生成迁徙图 软件架构 html echarts js 使用说明 将文件放到同一目录下打开index.html即可 默认是小飞机图标,如果想修改图标,将图片放到同一目录,如1.svg 代码修改为对应位…...

开发、测试、生产环境
开发环境:开发环境是程序猿们专门用于开发的服务器,配置可以比较随意, 为了开发调试方便,一般打开全部错误报告。简单讲就是项目尚且处于编码阶段,一般这时候会把代码放在开发环境中,不会放在生产环境中。 …...

红队攻防文库文章集锦
再救你一次,不要让欲望击溃你的意志 0.红队攻防 1.红队实战 红队攻防之特殊场景上线cs和msf CVE-2021-42287&CVE-2021-42278 域内提权 红队攻防之Goby反杀 红队攻防实战之钉钉RCE 红队攻防实战之从边界突破到漫游内网(无cs和msf) 红队攻防实战系列一之C…...

如何快速上手Office自定义界面编辑器:打造你的专属办公环境
如何快速上手Office自定义界面编辑器:打造你的专属办公环境 【免费下载链接】office-custom-ui-editor Standalone tool to edit custom UI part of Office open document file format 项目地址: https://gitcode.com/gh_mirrors/of/office-custom-ui-editor …...

Java连接Kafka示例
1、引入依赖<dependency><groupId>org.apache.kafka</groupId><artifactId>kafka_2.12</artifactId><version>2.1.0</version><scope>provided</scope></dependency><!-- https://mvnrepository.com/artifact/…...

如何为Surge Swift库编写高性能测试用例:完整指南
如何为Surge Swift库编写高性能测试用例:完整指南 Surge是一个基于Accelerate框架的Swift库,提供高性能的矩阵数学、数字信号处理和图像处理功能。本文将详细介绍如何为Surge编写高质量的性能测试用例,确保你的数值计算代码既正确又高效。 …...

告别网络依赖:HY-MT1.5-1.8B离线翻译模型保姆级手机端部署指南
告别网络依赖:HY-MT1.5-1.8B离线翻译模型保姆级手机端部署指南 1. 引言 在移动互联网时代,语言障碍仍然是全球交流的主要壁垒之一。传统翻译工具依赖云端服务,不仅需要稳定的网络连接,还存在隐私泄露风险。腾讯混元团队于2025年…...

MDCSwipeToChoose快速入门:5步创建你的第一个滑动卡片应用
MDCSwipeToChoose快速入门:5步创建你的第一个滑动卡片应用 【免费下载链接】MDCSwipeToChoose Swipe to "like" or "dislike" any view, just like Tinder.app. Build a flashcard app, a photo viewer, and more, in minutes, not hours! 项…...

Emwin实现Edit控件与数字键盘交互:从点击到Text显示的完整流程
1. Emwin数字键盘交互实现概述 在嵌入式GUI开发中,数字键盘与Edit控件的交互是高频需求场景。想象一下ATM机的密码输入界面,或者工业设备参数设置面板——点击输入框弹出数字键盘,输入完成后数据自动更新到显示区域,这种交互逻辑背…...

语言的边界,与软件的命运萍
1. 引入 在现代 AI 工程中,Hugging Face 的 tokenizers 库已成为分词器的事实标准。不过 Hugging Face 的 tokenizers 是用 Rust 来实现的,官方只提供了 python 和 node 的绑定实现。要实现与 Hugging Face tokenizers 相同的行为,最好的办法…...

【Python实战解析】从数据采集到模型预测:一个完整天气数据分析项目的技术实现
1. 项目背景与核心价值 天气数据分析是数据科学领域最经典的实战项目之一。去年我在帮某气象机构做数据中台改造时,就完整实施过类似的流程。这种项目最大的价值在于:用真实业务场景串联Python技术栈,从原始数据到智能预测形成闭环。 为什么选…...

STM32+FreeRTOS轻量级确定性以太网接口实现
1. 项目概述EthernetNetif_RSF是一个面向嵌入式实时系统的轻量级以太网网络接口(Netif)实现,专为基于 STM32 系列微控制器(特别是带 ETH 外设的型号,如 STM32F4/F7/H7)并运行 FreeRTOS 操作系统的平台设计。…...
)
告别手动复制粘贴!用PowerShell脚本批量下载全球1米树冠高度数据(附完整脚本)
告别手动复制粘贴!用PowerShell脚本批量下载全球1米树冠高度数据(附完整脚本) 在生态研究和地理信息系统(GIS)工作中,处理大规模栅格数据是家常便饭。想象一下,当你需要下载数百个甚至上千个1米…...