RT-DETR改进 | 2023 | InnerEIoU、InnerSIoU、InnerWIoU、InnerDIoU等二十余种损失函数
 论文地址:官方Inner-IoU论文地址点击即可跳转
论文地址:官方Inner-IoU论文地址点击即可跳转
官方代码地址:官方代码地址-官方只放出了两种结合方式CIoU、SIoU
本位改进地址: 文末提供完整代码块-包括InnerEIoU、InnerCIoU、InnerDIoU等七种结合方式和其AlphaIoU变种结合起来可以达到二十余种

一、本文介绍
本文给大家带来的是RT-DETR最新改进,为大家带来最近新提出的InnerIoU的内容同时用Inner的思想结合SIoU、WIoU、GIoU、DIoU、EIOU、CIoU等损失函数,形成 InnerIoU、InnerSIoU、InnerWIoU、等新版本损失函数,同时还结合了AIpha思想,形成的新的损失函数,其中Inner的主要思想是:引入了不同尺度的辅助边界框来计算损失,(该方法在处理非常小目标的检测任务时表现出良好的性能(但是在其它的尺度检测时也要比普通的损失要好)。文章会详细探讨这些损失函数如何提高RT-DETR在各种检测任务中的性能,包括提升精度、加快收敛速度和增强模型对复杂场景的适应性。
RT-DETR改进专栏:RT-DETR专栏——持续复现各种顶会内容——论文收割机
目录
一、本文介绍
二、各种损失函数的基本原理
2.1 交集面积和并集面积
2.2 InnerIoU的思想
2.2.1结合InnerIoU各种损失函数的效果图
2.3 InnerSIoU
2.4 InnerWioU
2.5 InnerGIoU
2.6 InnerDIoU
2.7 InnerEIoU
2.8 InnerCIoU
三、InnerIoU等损失函数代码块
四、添加InnerIoU等损失函数到模型中
4.1 修改一
7.2 修改二
五、总结
二、各种损失函数的基本原理
2.1 交集面积和并集面积
在理解各种损失函数之前我们需要先来理解一下交集面积和并集面积,在数学中我们都学习过集合的概念,这里的交集和并集的概念和数学集合中的含义是一样的。

2.2 InnerIoU的思想
Inner-IoU(内部交并比)的主要思想是:改进目标检测中边界框回归(BBR)的准确性,特别是在处理高度重叠的目标时。传统的IoU(交并比)计算方法考虑了预测边界框和真实边界框的整体重叠区域,而Inner-IoU则专注于边界框内部的重叠部分。它通过引入辅助边界框,这些辅助框是原始边界框的缩小版本,来计算损失函数。
这种方法的优点包括:
- 针对性优化:Inner-IoU通过关注边界框的核心部分而非整体,提供了对重叠区域更加精确的评估。
- 调整尺度:通过控制辅助边界框的大小,Inner-IoU允许对不同的数据集和检测任务进行微调。
- 提高泛化能力:实验证明,Inner-IoU在不同的数据集上显示出比传统IoU更好的泛化性能。
- 处理高低IoU样本:对于高IoU样本,使用较小的辅助框可以加速模型学习;而对于低IoU样本,使用较大的辅助框可以改善回归性能。
总结:Inner-IoU是一种更细致、更专注于目标中心的性能评估指标,它通过辅助框的尺度调整提高了目标检测任务的精确度和效率。
2.2.1结合InnerIoU各种损失函数的效果图
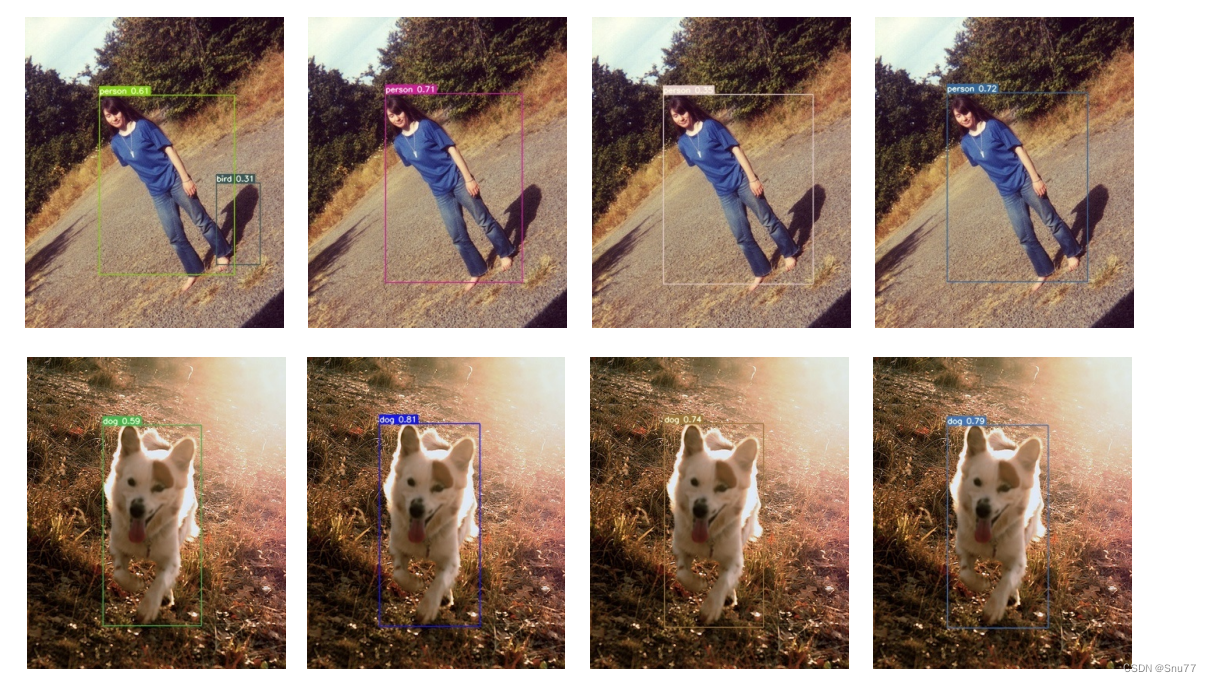
上面的图片展示了CIoU 和 Inner-CIoU 方法。图中从左至右分别表示 CIoU 方法,以及不同比例(0.7、0.75 和 0.8)的 Inner-CIoU 方法的检测结果
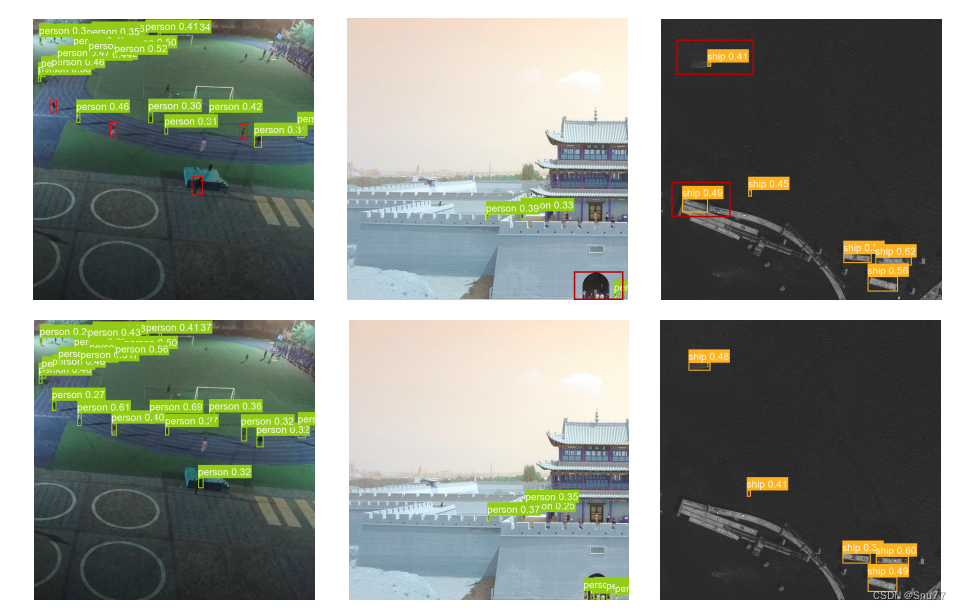
这个图片可以看出这个Innner的思想在小目标检测的时候效果能够达到极致(最适用于小范围但是其它的情况也能够有效但是小目标是效果最好的情景)
PS:下面介绍的是融合的各种思想就是将其中的IoU替换为我们上面求出来的InnerIoU即可和其中的参数也替换为InnerIoU的思想,其中各种损失函数的本身思想并没有改变,只是改变了其中的 参数。
2.3 InnerSIoU
论文地址:SIoU: More Powerful Learning for Bounding Box Regression
适用场景:适用于需要高精度边界框对齐的场景,如精细的物体检测和小目标检测。
概念:SIoU损失通过融入角度考虑和规模敏感性,引入了一种更为复杂的边界框回归方法,解决了以往损失函数的局限性,SIoU损失函数包含四个组成部分:角度损失、距离损失、形状损失和第四个未指定的组成部分。通过整合这些方面,从而实现更好的训练速度和预测准确性。

2.4 InnerWioU
论文地址:WIoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism
适用场景:适用于需要动态调整损失焦点的情况,如不均匀分布的目标或不同尺度的目标检测。
概念:引入动态聚焦机制的IoU变体,旨在改善边界框回归损失。

2.5 InnerGIoU
论文地址:GIoU: A Metric and A Loss for Bounding Box Regression
适用场景:适合处理有重叠和非重叠区域的复杂场景,如拥挤场景的目标检测。
概念:在IoU的基础上考虑非重叠区域,以更全面评估边界框

2.6 InnerDIoU
论文地址:DIoU: Faster and Better Learning for Bounding Box Regression
适用场景:适用于需要快速收敛和精确定位的任务,特别是在边界框定位精度至关重要的场景。
概念:结合边界框中心点之间的距离和重叠区域。

2.7 InnerEIoU
论文地址:EIoU:Loss for Accurate Bounding Box Regression
适用场景:可用于需要进一步优化边界框对齐和形状相似性的高级场景。
概念:EIoU损失函数的核心思想在于提高边界框回归的准确性和效率。它通过以下几个方面来优化目标检测:
1. 增加中心点距离损失:通过最小化预测框和真实框中心点之间的距离,提高边界框的定位准确性。
2. 考虑尺寸差异:通过惩罚宽度和高度的差异,EIoU确保预测框在形状上更接近真实框。
3. 结合最小封闭框尺寸:将损失函数与包含预测框和真实框的最小封闭框的尺寸相结合,从而使得损失更加敏感于对象的尺寸和位置。
EIoU损失函数在传统IoU基础上增加了这些考量,以期在各种尺度上都能获得更精确的目标定位,尤其是在物体大小和形状变化较大的场景中。

2.8 InnerCIoU
论文地址:CIoU:Enhancing Geometric Factors in Model Learning
适用场景:适合需要综合考虑重叠区域、形状和中心点位置的场景,如复杂背景或多目标跟踪。
概念:综合考虑重叠区域、中心点距离和长宽比。

三、InnerIoU等损失函数代码块
此代码块块的基础版本来源于Github的开源版本,我在其基础上将Inner的思想加入其中形成了各种Inner的思想同时融合各种改良版本的损失函数形成对应版本的InnerIoU、InnerCIoU等损失函数。
class Inner_WIoU_Scale:''' monotonous: {None: origin v1True: monotonic FM v2False: non-monotonic FM v3}momentum: The momentum of running mean'''iou_mean = 1.monotonous = False_momentum = 1 - 0.5 ** (1 / 7000)_is_train = Truedef __init__(self, iou):self.iou = iouself._update(self)@classmethoddef _update(cls, self):if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \cls._momentum * self.iou.detach().mean().item()@classmethoddef _scaled_loss(cls, self, gamma=1.9, delta=3):if isinstance(self.monotonous, bool):if self.monotonous:return (self.iou.detach() / self.iou_mean).sqrt()else:beta = self.iou.detach() / self.iou_meanalpha = delta * torch.pow(gamma, beta - delta)return beta / alphareturn 1def bbox_iou(box1, box2, x1y1x2y2=True, ratio=1, inner_GIoU=False, inner_DIoU=False, inner_CIoU=False, inner_SIoU=False,inner_EIoU=False, inner_WIoU=False, alpha=1, gamma=0.5, scale=False, eps=1e-7):(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_# IoU #IoU #IoU #IoU #IoU #IoU #IoU #IoU #IoU #IoU #IoUinter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)union = w1 * h1 + w2 * h2 - inter + eps# Inner-IoU #Inner-IoU #Inner-IoU #Inner-IoU #Inner-IoU #Inner-IoU #Inner-IoUinner_b1_x1, inner_b1_x2, inner_b1_y1, inner_b1_y2 = x1 - w1_ * ratio, x1 + w1_ * ratio, \y1 - h1_ * ratio, y1 + h1_ * ratioinner_b2_x1, inner_b2_x2, inner_b2_y1, inner_b2_y2 = x2 - w2_ * ratio, x2 + w2_ * ratio, \y2 - h2_ * ratio, y2 + h2_ * ratioinner_inter = (torch.min(inner_b1_x2, inner_b2_x2) - torch.max(inner_b1_x1, inner_b2_x1)).clamp(0) * \(torch.min(inner_b1_y2, inner_b2_y2) - torch.max(inner_b1_y1, inner_b2_y1)).clamp(0)inner_union = w1 * ratio * h1 * ratio + w2 * ratio * h2 * ratio - inner_inter + epsinner_iou = inner_inter / inner_union # inner_iouif scale:self = Inner_WIoU_Scale(1 - (inner_inter / inner_union))if inner_CIoU or inner_DIoU or inner_GIoU or inner_EIoU or inner_SIoU or inner_WIoU:cw = inner_b1_x2.maximum(inner_b2_x2) - inner_b1_x1.minimum(inner_b2_x1) # convex (smallest enclosing box) widthch = inner_b1_y2.maximum(inner_b2_y2) - inner_b1_y1.minimum(inner_b2_y1) # convex heightif inner_CIoU or inner_DIoU or inner_EIoU or inner_SIoU or inner_WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squaredrho2 = (((inner_b2_x1 + inner_b2_x2 - inner_b1_x1 - inner_b1_x2) ** 2 + (inner_b2_y1 + inner_b2_y2 - inner_b1_y1 - inner_b1_y2) ** 2) / 4) ** alpha # center dist ** 2if inner_CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha_ciou = v / (v - inner_iou + (1 + eps))return inner_iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoUelif inner_EIoU:rho_w2 = ((inner_b2_x2 - inner_b2_x1) - (inner_b1_x2 - inner_b1_x1)) ** 2rho_h2 = ((inner_b2_y2 - inner_b2_y1) - (inner_b1_y2 - inner_b1_y1)) ** 2cw2 = torch.pow(cw ** 2 + eps, alpha)ch2 = torch.pow(ch ** 2 + eps, alpha)return inner_iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIouelif inner_SIoU:# SIoU Loss https://arxiv.org/pdf/2205.12740.pdfs_cw = (inner_b2_x1 + inner_b2_x2 - inner_b1_x1 - inner_b1_x2) * 0.5 + epss_ch = (inner_b2_y1 + inner_b2_y2 - inner_b1_y1 - inner_b1_y2) * 0.5 + epssigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)sin_alpha_1 = torch.abs(s_cw) / sigmasin_alpha_2 = torch.abs(s_ch) / sigmathreshold = pow(2, 0.5) / 2sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)rho_x = (s_cw / cw) ** 2rho_y = (s_ch / ch) ** 2gamma = angle_cost - 2distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)return inner_iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIouelif inner_WIoU:if scale:return getattr(Inner_WIoU_Scale, '_scaled_loss')(self), (1 - inner_iou) * torch.exp((rho2 / c2)), inner_iou # WIoU https://arxiv.org/abs/2301.10051else:return inner_iou, torch.exp((rho2 / c2)) # WIoU v1return inner_iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areareturn inner_iou - torch.pow((c_area - inner_union) / c_area + eps,alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdfreturn inner_iou # IoU
四、添加InnerIoU等损失函数到模型中
4.1 修改一
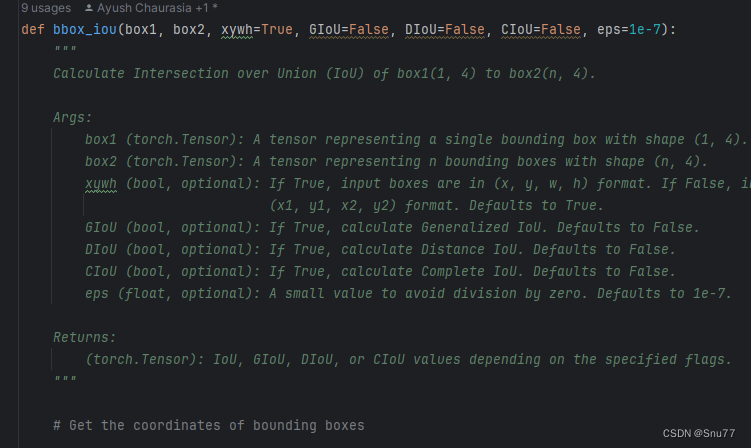
第一步我们需要找到如下的文件ultralytics/utils/metrics.py,找到如下的代码,下面的图片是原先的代码部分截图的正常样子,然后我们将上面的整个代码块将下面的整个方法(这里这是部分截图)内容全部替换。
7.2 修改二
第二步我们找到另一个文件如下->"ultralytics/models/utils/loss.py",(注意这个文件和YOLOv8的修改内容不是一个!!!!)我们找到如下的代码块,我们就可以进行设置了,看到我这里以及将EIoU都设置成True了,并且引入了alpha的思想进行改进大家可以多进行尝试,同时我们使用Inner思想将其设置为True即可,此时使用的就是InnerEIoU。

(这里暂时还不能使用Focus的思想!!!)
五、总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的RT-DETR改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
本专栏其它内容(持续更新)
RT-DETR改进专栏:RT-DETR专栏——持续复现各种顶会内容——论文收割机

相关文章:
RT-DETR改进 | 2023 | InnerEIoU、InnerSIoU、InnerWIoU、InnerDIoU等二十余种损失函数
论文地址:官方Inner-IoU论文地址点击即可跳转 官方代码地址:官方代码地址-官方只放出了两种结合方式CIoU、SIoU 本位改进地址: 文末提供完整代码块-包括InnerEIoU、InnerCIoU、InnerDIoU等七种结合方式和其AlphaIoU变种结合起来可以达到二十…...
JDBC编程基础
JDBC编程基础 JDBC介绍创建JDBC项目的步骤1.引入依赖2.注册驱动3.获取数据库连接4.获取sql执行对象 JDBC 常用 API 详解sql执行对象PreparedStatement作用 事务管理结果集对象 JDBC项目demo测试 JDBC介绍 每个数据库都会提供一组API来支持程序员实现自己客户端,自己…...

Linux shell命令
Linux shell命令 1、Shell简介 Shell 是一个用 C 语言编写的程序,它是用户使用 Linux 的桥梁。Shell 既是一种命令语言,又是一种程序设计语言。 Shell 是指一种应用程序,这个应用程序提供了一个界面,用户通过这个界面访问…...

Vue 3 面试经验分享
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
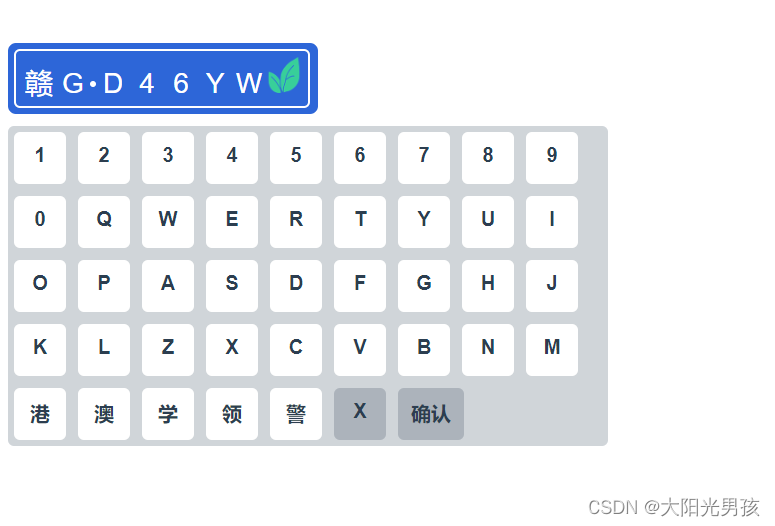
Vue简易的车牌输入键盘,可以根据需要修改
效果图如下: 代码如下: <template><div><div class"carNoBoxInput"><div style"padding: 6px;border: 2px solid #fff;border-radius: 6px;margin: 6px 3px 6px 6px;"><input class"inputBox"…...
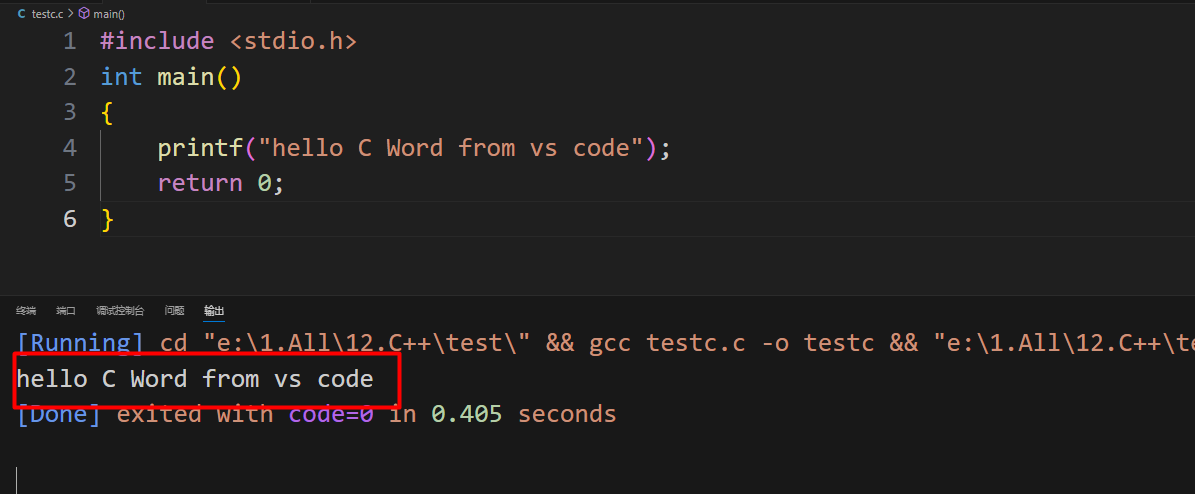
十分钟搭建VScode C/C++运行环境
一、下载配置vscode 1.下载安装VScode 地址:https://code.visualstudio.com/download 下载后,运行安装程序 (VSCodeUserSetup-{version}.exe)。这只需要一分钟。安装程序会将 Visual Studio Code 添加到环境变量中%,可以使用CMD键入“code”…...
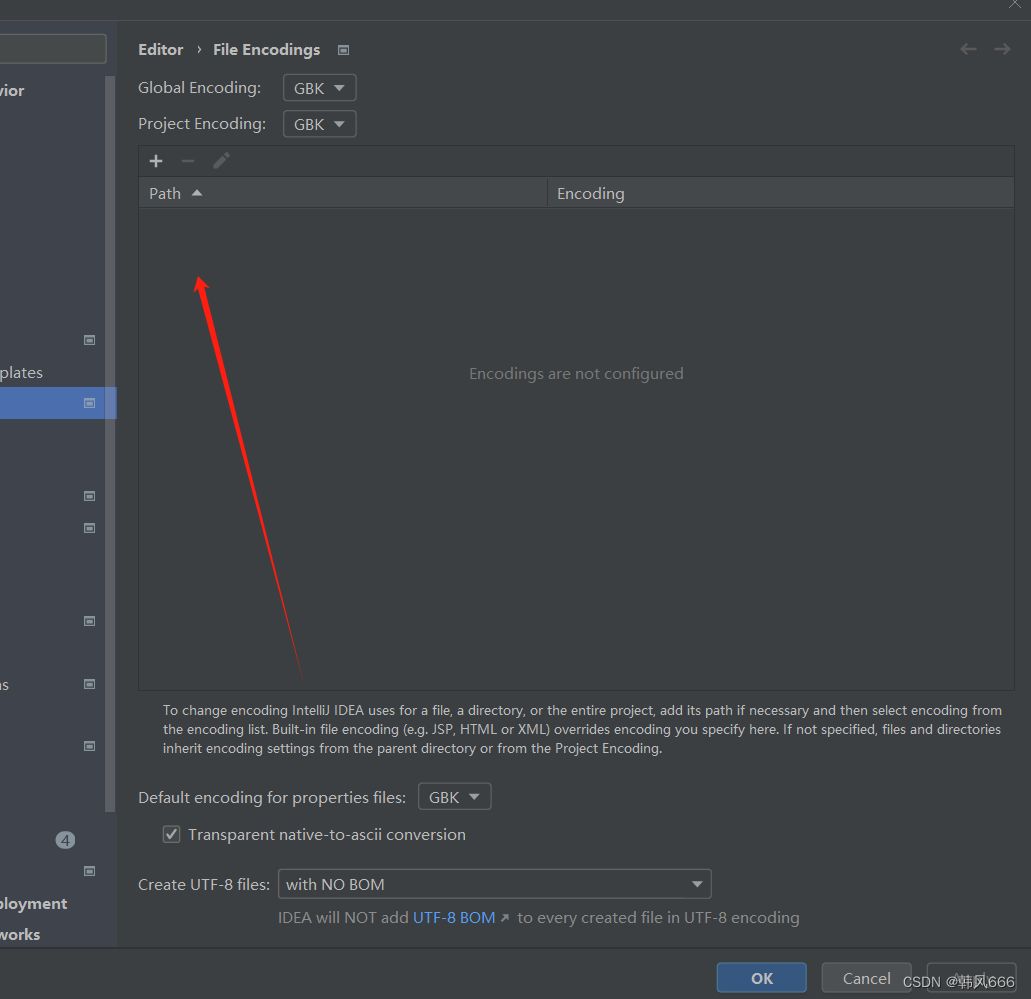
控制台gbk乱码
引用IntelliJ IDEA中 统一设置编码为utf-8或GBK-CSDN博客 特别注意file coding 的文件path和java的编码格式 配置...
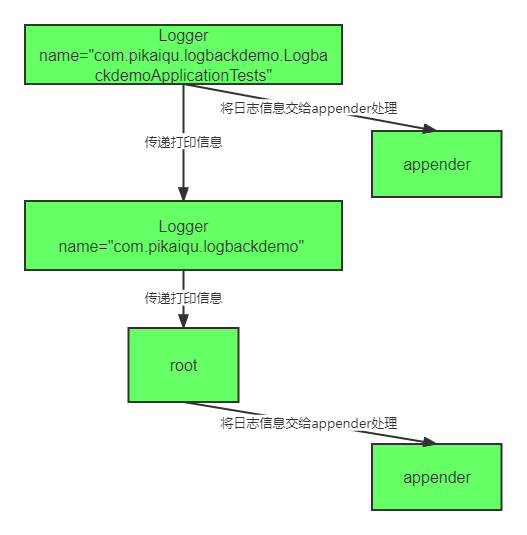
Springboot日志-logback
logback-spring.xml的配置项 共有一个父标签、两种属性、三个节点: 一个父标签:configuration 两种属性:contextName和property 三个节点:appender、root、logger 日志级别 日志级别从低到高分为TRACE < DEBUG < INFO < WARN &…...

六、Lua 运算符
文章目录 一、Lua 运算符(一)算术运算符(二)关系运算符(三)逻辑运算符(四)其他运算符 二、运算符优先级 一、Lua 运算符 运算符是一个特殊的符号,用于告诉解释器执行特定…...

Android frameworks 开发总结十一
1.修改GMS的setup wizard 1.1 找到需要修改的文件 打开vendor/partner_gms/apps/GmsSampleIntegration/res/values/config.xml文件。以Arashi R为例: <resources><string name="wizard_script_uri" translatable="false">android.resource…...
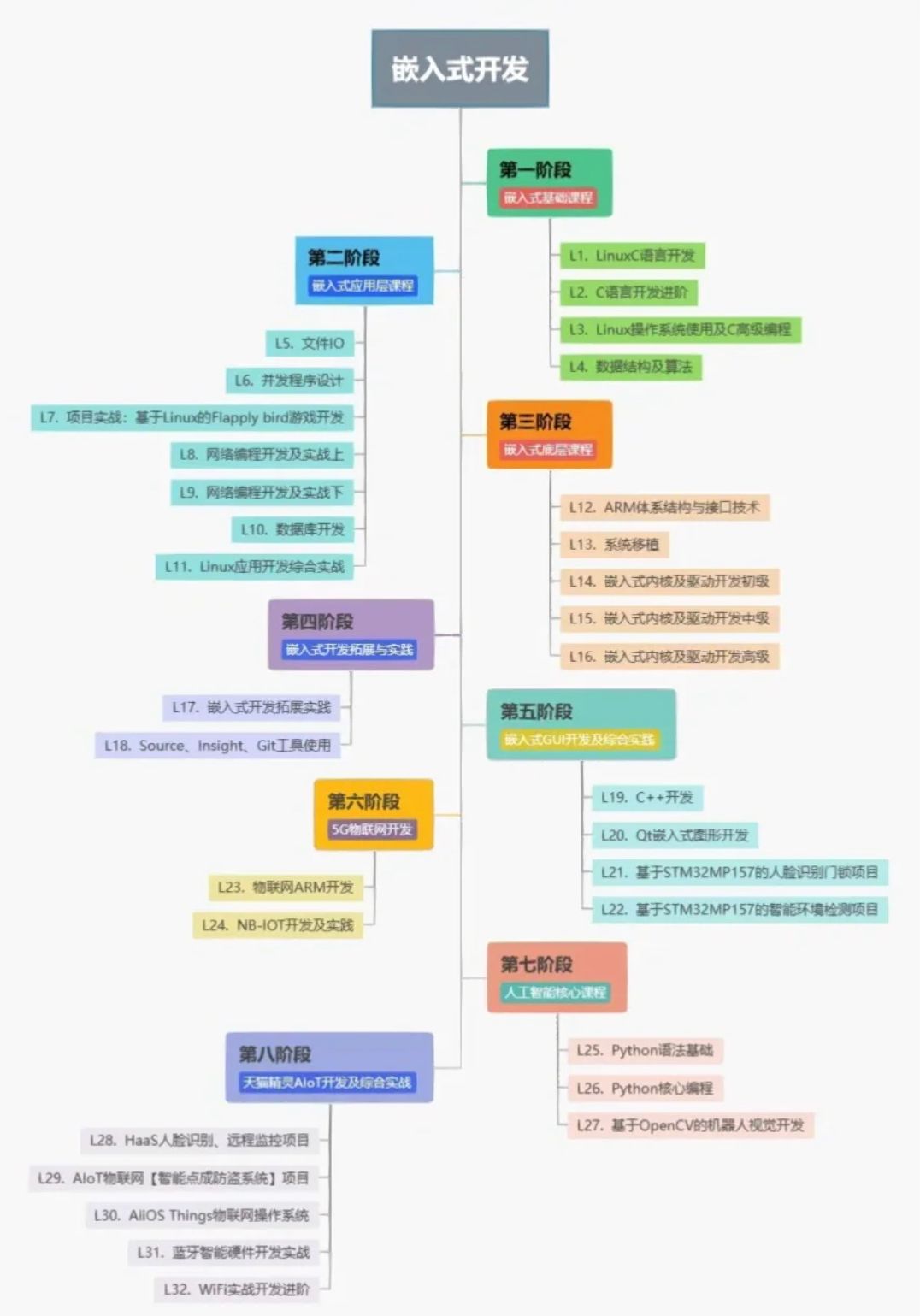
学嵌入式,已经会用stm32做各种小东西了,下一步是什么
学嵌入式,已经会用stm32做各种小东西了,下一步是什么,研究stm32的内部吗? 针对题主这种类型的,首先我想提出几个技术问题。 1,除了那几个常用的外设,stm32上集成的众多外设是否都有实际的使用经…...

Java面试题10
1.MyBatis 中 #{}和 ${}的区别是什么? #{} 是预编译的占位符,MyBatis会将其转化为一个占位符参数,安全性较高,可以防止 SQL注入; ${} 是字符串替换,直接将内容替换到SQL语句中,不会进行参数处理…...
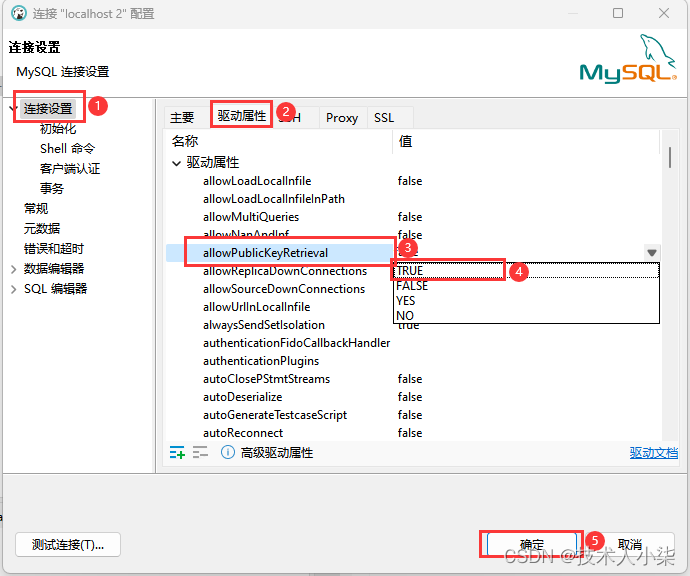
DBeaver连接MySQL提示“Public Key Retrieval is not allowed“问题解决方式
更新时间:2023年10月31日 11:37:53 作者:产品人小柒 dbeaver数据库连接工具,可以支持几乎所有的主流数据库.mysql,oracle.sqlserver,db2 等等,这篇文章主要给大家介绍了关于DBeaver连接MySQL提示"Public Key Retrieval is not allowed"问…...
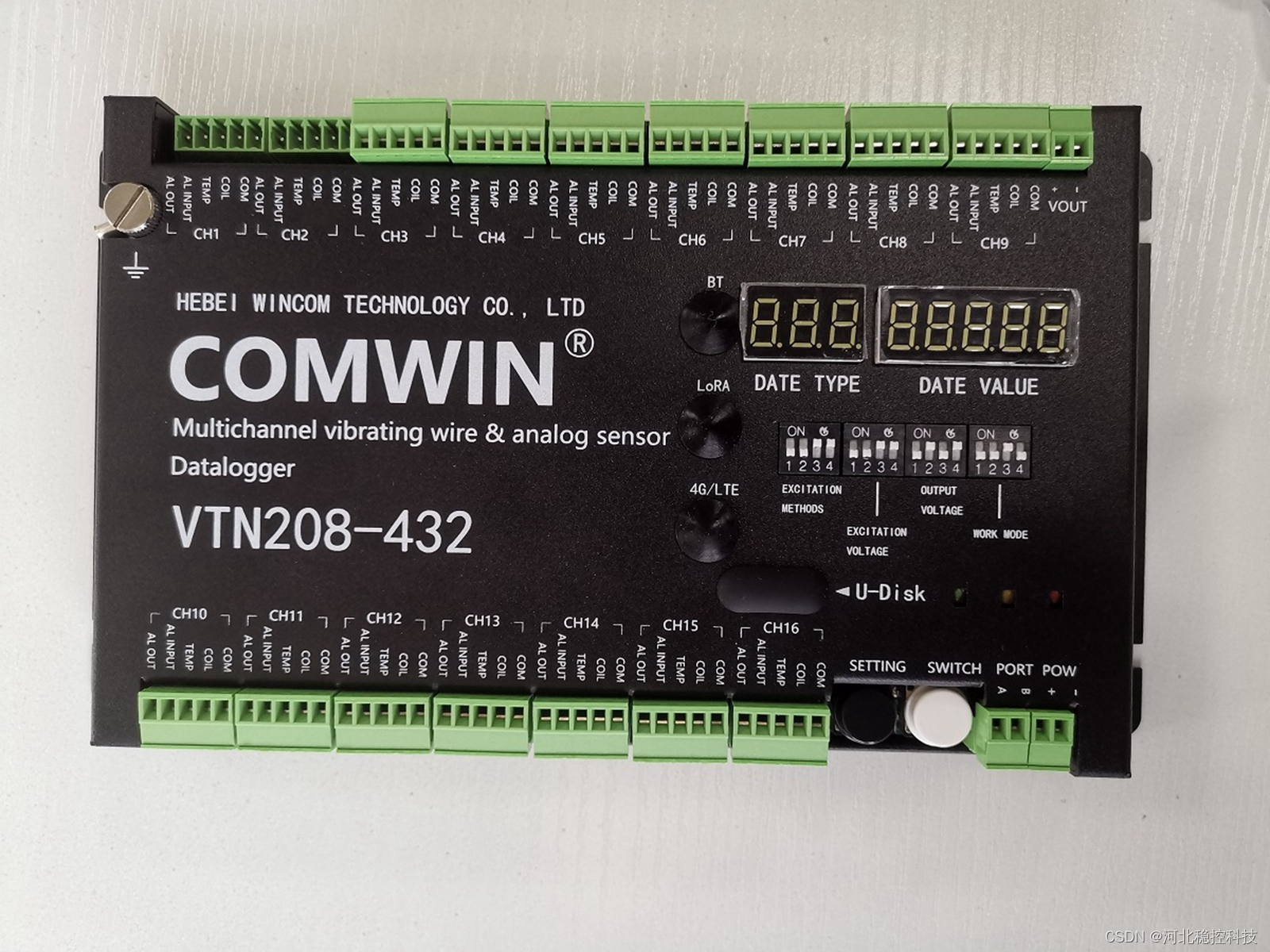
振弦式轴力计和振弦采集仪组成的安全监测解决方案
振弦式轴力计和振弦采集仪组成的安全监测解决方案 振弦式轴力计和振弦采集仪是一种常用的结构安全监测工具,可以用于评估建筑物、桥梁、隧道或其他结构的结构健康状态和安全性能。这种监测方案较为先进、精确,并且能够监测长期的结构反应,因此…...

卡尔曼滤波
通过 Eigen 矩阵运算实现线性卡尔曼滤波。模拟的是一辆带火箭发动机的汽车,一开始沿着X轴匀速运动,到X轴中间开启火箭发动机匀加速向Y轴起飞。同理可以仿真(x,y,z,yaw,pitch,raw) 6自由度的真实飞行情况 #include <iostream&g…...

不受平台限制,Sketch 网页版震撼登场
Sketch 是一种基于 Mac 的矢量图形编辑器,可用于数字设计。其主要功能包括无损矢量编辑、完美像素精度和数百个插件同步功能,可导出预设和代码。它是目前流行的页面交互协作设计工具。但是 Sketch 最大的缺点是对 Windows/PC 用户不友好。严格来说&#…...

如何使用.pth训练模型
一.使用.pth训练模型的步骤如下: 1.导入必要的库和模型 import torch import torchvision.models as models# 加载预训练模型 model models.resnet50(pretrainedTrue) 2.定义数据集和数据加载器 # 定义数据集和数据加载器 dataset MyDataset() dataloader to…...
C++11线程以及线程同步
C11中提供的线程类std::thread,基于此类创建一个新的线程相对简单,只需要提供线程函数和线程对象即可 一.命名空间 this_thread C11 添加一个关于线程的命名空间std::this_pthread ,此命名空间中提供四个公共的成员函数; 1.1 get_id() 调用命名空间s…...
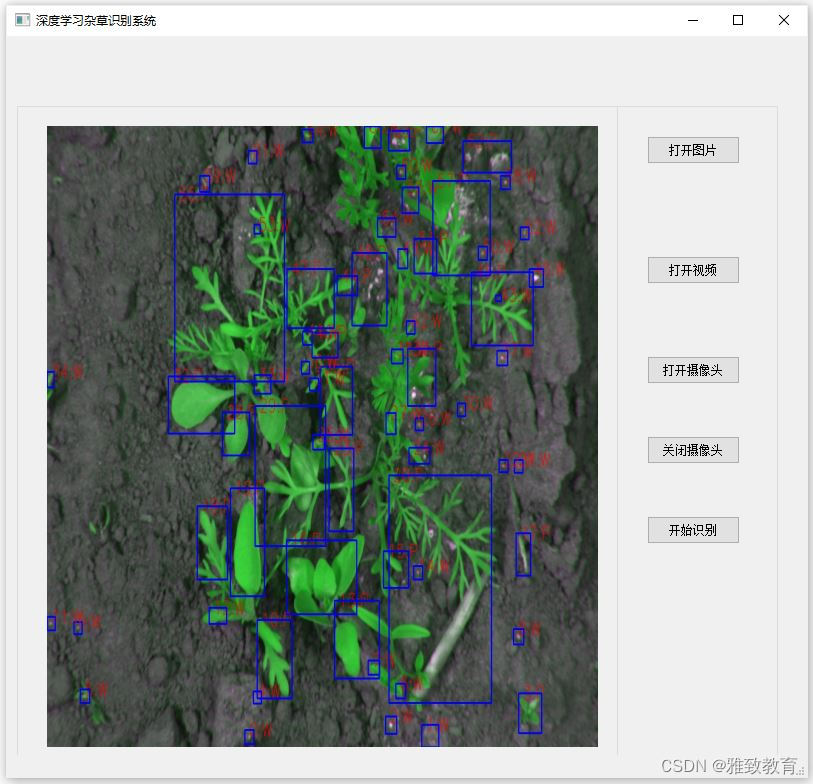
深度学习之基于YoloV3杂草识别系统
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 文章目录 一项目简介 二、功能三、系统四. 总结 一项目简介 深度学习在图像识别领域已经取得了显著的成果,其中基于YOLO(You Only Look Once)…...

Linux 命令vim(编辑器)
(一)vim编辑器的介绍 vim是文件编辑器,是vi的升级版本,兼容vi的所有指令,同时做了优化和延伸。vim有多种模式,其中常用的模式有命令模式、插入模式、末行模式:。 (二)vim编辑器基本操作 1 进入vim编辑文件 1 vim …...

终极指南:KOReader开源电子书阅读器如何打造完美个性化阅读体验
终极指南:KOReader开源电子书阅读器如何打造完美个性化阅读体验 【免费下载链接】koreader An ebook reader application supporting PDF, DjVu, EPUB, FB2 and many more formats, running on Cervantes, Kindle, Kobo, PocketBook and Android devices 项目地址…...

ai赋能vue开发,让快马平台智能生成数据可视化仪表盘
最近在做一个数据可视化项目,正好体验了用AI辅助Vue3开发的全流程。不得不说,现在的AI工具确实让前端开发效率提升了不少。下面分享下我是如何通过InsCode(快马)平台快速实现一个智能数据仪表盘的。 需求分析与技术选型 首先需要明确仪表盘的核心功能&am…...

千问3.5-27B模型缓存优化:加速OpenClaw任务响应
千问3.5-27B模型缓存优化:加速OpenClaw任务响应 1. 为什么需要缓存优化? 当我第一次将千问3.5-27B模型接入OpenClaw时,发现一个令人头疼的问题:重复性任务的响应时间波动很大。比如让OpenClaw帮我整理每日会议纪要,同…...

嵌入式视觉实战2——基于MaixCAM与PP-OCR的智能门禁车牌识别系统
1. MaixCAM与PP-OCR的完美组合 第一次接触MaixCAM时,我就被这个小巧的视觉模块惊艳到了。它内置的RISC-V处理器跑着完整的Linux系统,这意味着我们可以直接在上面部署各种AI模型,而不用像传统单片机那样从零开始搭建开发环境。最让我惊喜的是&…...

西门子SMART200 PLC与昆仑通态触摸屏在常压电热水锅炉比例模糊控制系统中的应用
西门子SMART200 PLC梯形图,SR20,昆仑通态触摸屏组态画面,常压电热水锅炉比例模糊控制追目标温度,PLC源触摸屏源CAD原理图图纸全套常压电热水锅炉那种“冰火两重天”的加热体验谁懂?茶水间或者小烘干池边上,…...

抖音无水印批量下载完整指南:3分钟快速上手免费工具
抖音无水印批量下载完整指南:3分钟快速上手免费工具 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...

如何快速实现抖音音频批量下载:douyin-downloader完整指南
如何快速实现抖音音频批量下载:douyin-downloader完整指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback s…...

EcomGPT电商大模型实战案例:同一商品生成Amazon/Temu/Shopee三平台差异化文案
EcomGPT电商大模型实战案例:同一商品生成Amazon/Temu/Shopee三平台差异化文案 1. 项目背景与价值 跨境电商卖家经常面临一个痛点:同一个商品需要在不同平台上架,但每个平台的文案风格和用户偏好完全不同。传统方法需要人工针对每个平台单独…...

如何用UABEA轻松探索和编辑Unity游戏资源:完整指南
如何用UABEA轻松探索和编辑Unity游戏资源:完整指南 【免费下载链接】UABEA c# uabe for newer versions of unity 项目地址: https://gitcode.com/gh_mirrors/ua/UABEA UABEA(Unity Asset Bundle Extractor Avalonia)是一款强大的跨平…...

中科方德V5系统X11vnc安装全攻略:从配置到自启动一步到位
中科方德V5系统X11vnc深度配置指南:解锁远程桌面的高阶玩法 国产操作系统的崛起为技术生态带来了全新选择,中科方德V5作为其中的佼佼者,其安全稳定的特性深受企业用户青睐。当我们需要在这套系统上实现远程桌面控制时,X11vnc凭借其…...