不同路径 II(力扣LeetCode)动态规划
不同路径 II
题目描述
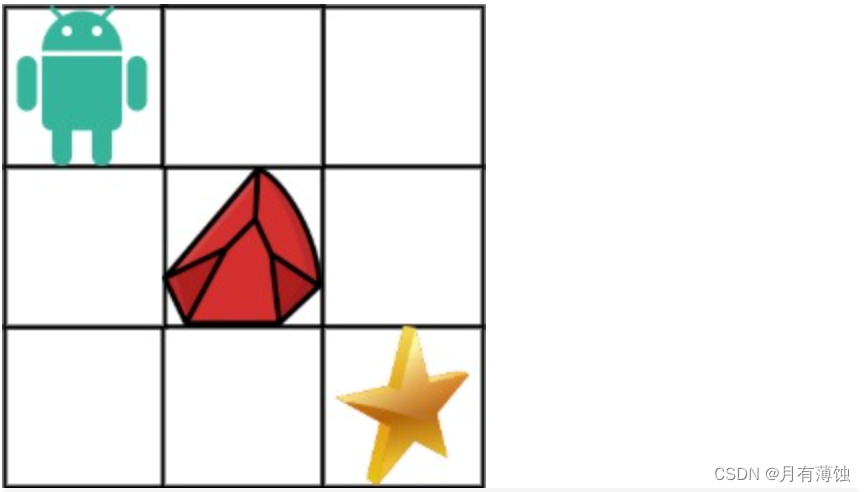
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
示例 1:

输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
- 向右 -> 向右 -> 向下 -> 向下
- 向下 -> 向下 -> 向右 -> 向右
示例 2:

输入:obstacleGrid = [[0,1],[0,0]]
输出:1
提示:
- m == obstacleGrid.length
- n == obstacleGrid[i].length
- 1 <= m, n <= 100
- obstacleGrid[i][j] 为 0 或 1
动规五部曲:
- 确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。 - 确定递推公式
递推公式和62.不同路径⼀样,dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
但这⾥需要注意⼀点,因为有了障碍,(i, j)如果就是障碍的话应该就保持初始状态(初始状态为0)。
所以代码为:
if (obstacleGrid[i][j] == 0) { // 当(i, j)没有障碍的时候,再推导dp[i][j]dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
- dp数组如何初始化
在不同路径不同路径中我们给出如下的初始化:
vector<vector<int>> dp(m, vector<int>(n, 0)); // 初始值为0
for (int i = 0; i < m; i++) dp[i][0] = 1;
for (int j = 0; j < n; j++) dp[0][j] = 1;
因为从(0, 0)的位置到(i, 0)的路径只有⼀条,所以dp[i][0]⼀定为1,dp[0][j]也同理。
但如果(i, 0) 这条边有了障碍之后,障碍之后(包括障碍)都是⾛不到的位置了,所以障碍之后的dp[i][0]应该还是
初始值0。
如图:
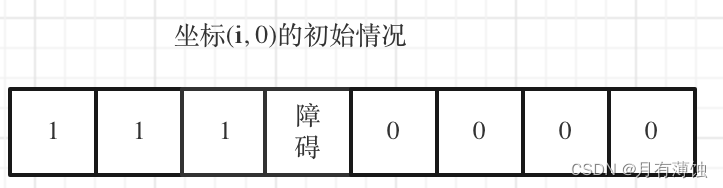
下标(0, j)的初始化情况同理。
所以本题初始化代码为:
vector<vector<int>> dp(m, vector<int>(n, 0));
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) dp[0][j] = 1;
注意代码⾥for循环的终⽌条件,⼀旦遇到obstacleGrid[i][0] == 1的情况就停⽌dp[i][0]的赋值1的操作,dp[0][j]同理
4. 确定遍历顺序
从递归公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1] 中可以看出,⼀定是从左到右⼀层⼀层遍历,这样保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]⼀定是有数值。
代码如下:
for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {if (obstacleGrid[i][j] == 1) continue;dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}
}
- 举例推导dp数组
拿示例1来举例如题:
对应的dp table 如图:
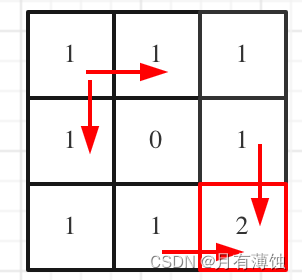
如果这个图看不懂,建议再理解⼀下递归公式,然后照着⽂章中说的遍历顺序,⾃⼰推导⼀下!
力扣提交代码
c++
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {int m = obstacleGrid.size();int n = obstacleGrid[0].size();if (obstacleGrid[m - 1][n - 1] == 1 || obstacleGrid[0][0] == 1) //如果在起点或终点出现了障碍,直接返回0return 0;vector<vector<int>> dp(m, vector<int>(n, 0));for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) dp[0][j] = 1;for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {if (obstacleGrid[i][j] == 1) continue;dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}return dp[m - 1][n - 1];}
};
c语言
int uniquePathsWithObstacles(int** obstacleGrid, int obstacleGridSize, int* obstacleGridColSize)
{int n=obstacleGridSize;// 定义障碍物网格行数int m=obstacleGridColSize[0];// 定义障碍物网格列数//如果在起点或终点出现了障碍,直接返回0if(obstacleGrid[0][0]==1||obstacleGrid[n-1][m-1]==1) return 0;int i,j;int dp[110][110]={0};//所有元素先初始化为0//初始化dp数组for(i=0;i<n&&obstacleGrid[i][0]==0;i++) dp[i][0]=1;//第一行如果遇到障碍物,则后面为0for(j=0;j<m&&obstacleGrid[0][j]==0;j++) dp[0][j]=1;//第一列如果遇到障碍物,则后面为0for(i=1;i<n;i++){for(j=1;j<m;j++){if(obstacleGrid[i][j]==1) continue;//遇到障碍物就跳过继续dp[i][j]=dp[i-1][j]+dp[i][j-1];}}return dp[n-1][m-1];
}
相关文章:
不同路径 II(力扣LeetCode)动态规划
不同路径 II 题目描述 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。 现在考虑网格中有障碍物。…...

探索深度学习:从理论到实践的全面指南
探索深度学习:从理论到实践的全面指南 摘要: 本文旨在提供一个关于深度学习的全面指南,带领读者从理论基础到实践应用全方位了解这一技术。我们将介绍深度学习的历史、基本原理、常用算法和应用场景,并通过Python代码示例和Tens…...
统计二叉树中的伪回文路径 : 用位运用来加速??
题目描述 这是 LeetCode 上的 「1457. 二叉树中的伪回文路径」 ,难度为 「中等」。 Tag : 「DFS」、「位运算」 给你一棵二叉树,每个节点的值为 1 到 9 。 我们称二叉树中的一条路径是 「伪回文」的,当它满足:路径经过的所有节点值…...
【数据结构】树与二叉树(廿四):树搜索指定数据域的结点(算法FindTarget)
文章目录 5.3.1 树的存储结构5. 左儿子右兄弟链接结构 5.3.2 获取结点的算法1. 获取大儿子、大兄弟结点2. 搜索给定结点的父亲3. 搜索指定数据域的结点a. 算法FindTargetb. 算法解析c. 代码实现a. 使用指向指针的指针b. 直接返回找到的节点 4. 代码整合 5.3.1 树的存储结构 5.…...
vue3怎么提升效率的?为什么vue3比vue2快?效率提升主要在哪些方面?
官方文档中说vue3在 客户端渲染效率比vue2提升了1.3~2倍, SSR渲染效率比vue2提升了2~3倍,那么究竟是怎么提升的呢? 一、静态提升 在 vue3项目中的package.json文件中,可以看到这个 vue/compiler-sfc,它是用来解析(.v…...

C语言文件操作 | 文件分类、文件打开与关闭、文件的读写、文件状态、文件删除与重命名、文件缓冲区
欢迎关注博主 Mindtechnist 或加入【Linux C/C/Python社区】一起学习和分享Linux、C、C、Python、Matlab,机器人运动控制、多机器人协作,智能优化算法,滤波估计、多传感器信息融合,机器学习,人工智能等相关领域的知识和…...
从零开始的c语言日记day37——数组指针练习
一、 取地址数组储存在了*p里,里面储存的是整个数组的地址但本质也是第一个元素的地址解引用后1为4个字节所以就可以打印数组了。但一般不用这种方法 这样更方便一些 打印多维数组 如果不用这样传参,用指针传参怎么做呢? Main里函数的arr表示…...

codeforces 1851F
题目链接 题目大意:给你一个长度为n的数组a, 和一个整数k(2<n<2e5, k<30, a[i]<pow(2,k))。 任选一个x,求(a[i] ^ x) & (a[j] ^ x) 的最大值(1<i,j<n, i!j, x<pow(2,k))。 由于中间有个&,所以我们要求两个数最高…...

js把格式为YYYY-MM-DD HH:mm:ss的时间转换为UTC时间ISO 8601格式
// 要转换的日期字符串 const inputDate 2023-11-25 14:54:01; // 将日期字符串转换为Date对象 const dateObj new Date(inputDate); // 获取时间戳(毫秒) const timestamp dateObj.getTime(); // 转换格式 const outputDate new Date(tim…...

使用 Java 来读取 Excel 文件,检查每一行中的 URL,并将不符合条件的行标记为红色
-- 日、时、分、秒,这是计时的单位,惜时就应该惜日、惜时、惜分、惜秒。 用 Java 来读取 Excel 文件,检查每一行中的 URL,并将不符合条件的行标记为红色。以下是一个简单的示例,使用 Apache POI 进行 Excel 操作&#…...

雷达公式实现(matlab)
雷达公式实现 代码来源:《雷达系统分析与设计(MATLAB版)(第三版)》 function [snr] radar_eq(pt,freq,g,sigma,b,nf,loss,range) % This program implements Eq.(1.63) %% Inputs:% pt——峰值功率,W% freq——雷达中心频率,Hz% g——天线…...
CMake构建一个转换为3d tile的开源代码成功
之前CMake构建一个转换为3d tile的开源代码,生成解决方案之后,从VS2019打开; 总是报一个错误,跟 mocs_compilation_Debug.cpp 这个QT相关文件有关,它生成的obj,总是报模块计算机x64和目标计算机x86冲突&am…...

Java线程通信
线程通信 案例 package com.itheima.d4;public class ThreadTest {public static void main(String[] args) {Desk desk new Desk();//创建3个生产者线程new Thread(() -> {while (true) {desk.put();}}, "厨师1").start();new Thread(() -> {while (true) {…...
计算4人队形的最可能分布
2 2 2 1 2 2 2 2 2 1 2 2 2 2 2 1 2 2 3 3 3 x 3 3 2 2 2 1 2 2 2 2 2 1 2 2 在6*6的平面上2个点随机分布,有3种分布方式,2a1,2a2,2a3,占比为1:5:1. 3 3 …...

如何解决 Java 中的 IllegalArgumentException 异常?
非法参数异常(IllegalArgumentException)的抛出是为了表明一个方法被传递了一个非法参数。该异常扩展了 RuntimeException 类,因此属于在 Java 虚拟机(JVM)运行期间可能抛出的异常。它是一种未检查异常,因此…...

Vue 双向数据绑定
之前通过v-bind来完成的数据绑定,属性值和表达式进行绑定,表达式的值发生变化了属性值也跟着发生变化。 单向数据绑定: <!DOCTYPE html> <html> <head><meta charset"UTF-8"><title>首页</titl…...

电脑开机过程中,程序的启动的顺序是怎么样的?
电脑的启动过程涉及多个步骤,程序按照特定的顺序启动。这个过程通常如下: 电源开启: 当你按下电源按钮时,电源供应器(PSU)开始向电脑的各个组件供电。 自检加电(POST): 这是电脑启动过程的第一步。在这个阶段,基本输入输出系统(BIOS)或统一可扩展固件接口(UEFI)执行…...

JSON详细教程
😊JSON详细教程 🚩JSON简介☃️JSON语法规则🔊JSON和JavaScript对象的区别 ☃️JSON数据类型字符串🔊数字🔊布尔值🔊数组🔊对象🔊Null ☃️JSON对象🔊访问JSON对象的值&a…...
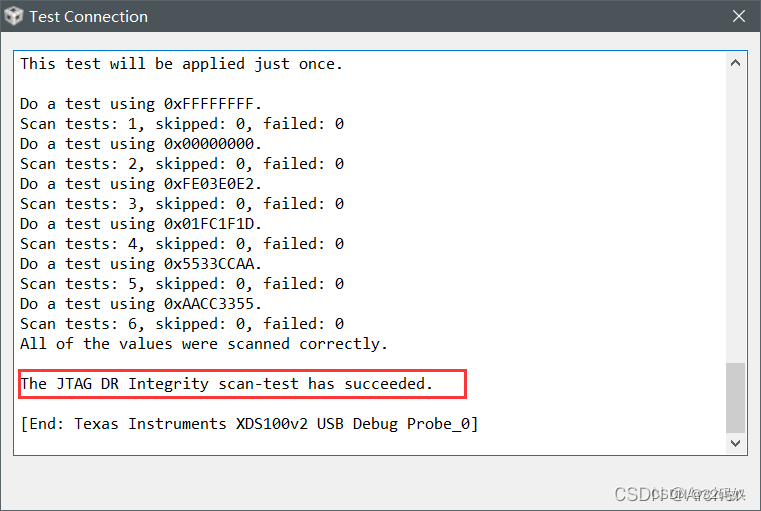
DSP介绍及CCS
文章目录 CCS版本编译器CCS使用注意严禁中文 CCS的基本操作新建工程导入现有工程调整字体的大小工程界面恢复标签的使用 仿真盒小虫子进入在线Debug 仿真器芯片TMS320F28355基本介绍特性 DSP中特殊指令dsp指令中的EALLOW EDIS CCS TI官网 版本 CCS版本: CCS8.3.1…...
)
周期串(Periodic Strings)
做了我两个小时,我真的裂开 之前已经发过一次了,走在回宿舍的路上突然发现有些情况并不适用,赶紧删掉了 题目如下: 如果一个字符串可以由某个长度为k的字符串重复多次得到,则称该串以k为周期。例如:abca…...
)
还在手戳像素点选性别?带你避开 HTML 表单 `<input>` 与 `<label>` 的核心大坑(附源码)
表单是用户与数据库交互的唯一大门!黑客想要搞 SQL 注入、XSS 跨站脚本攻击,第一步就是盯上你的输入框。而在审查很多新人的代码时,我不仅经常看到安全隐患,更看到了极其反人类的交互体验——比如让你注册账号时,性别单选框小到要拿显微镜去点! 今天,就从底层逻辑出发,…...
【限时解密】SITS2026未发布议程泄露:下一代长上下文架构“Hierarchical Chunked Attention”将重构Transformer范式?
第一章:SITS2026分享:大模型长上下文处理 2026奇点智能技术大会(https://ml-summit.org) 在SITS2026大会上,多家前沿AI实验室联合发布了针对长上下文建模的新型架构范式,突破传统Transformer在序列长度扩展中的内存与计算瓶颈。…...
)
SITS2026圆桌闭门纪要首发:大模型工程化正在经历第4次范式迁移(附6家头部企业架构演进对比图谱)
第一章:SITS2026圆桌:大模型工程化的未来趋势 2026奇点智能技术大会(https://ml-summit.org) 在SITS2026圆桌讨论中,来自Meta、阿里云、Hugging Face与CNCF模型工作组的七位工程实践者共同指出:大模型工程化正从“能跑通”迈向“…...

OneNote效率革命:如何用OneMore插件将你的笔记体验提升到全新高度
OneNote效率革命:如何用OneMore插件将你的笔记体验提升到全新高度 【免费下载链接】OneMore A OneNote add-in with simple, yet powerful and useful features 项目地址: https://gitcode.com/gh_mirrors/on/OneMore 如果你经常使用OneNote记录笔记…...

原神抽卡数据分析终极指南:如何使用genshin-wish-export免费导出你的祈愿记录
原神抽卡数据分析终极指南:如何使用genshin-wish-export免费导出你的祈愿记录 【免费下载链接】genshin-wish-export Easily export the Genshin Impact wish record. 项目地址: https://gitcode.com/GitHub_Trending/ge/genshin-wish-export 你是否曾经在原…...

【大模型联邦学习落地实战指南】:SITS2026权威演讲深度拆解,3大行业真实案例+5步部署避坑清单
第一章:SITS2026演讲:大模型联邦学习应用 2026奇点智能技术大会(https://ml-summit.org) 在SITS2026主会场,来自MIT与华为诺亚方舟实验室的联合团队展示了基于LLaMA-3架构的大模型联邦学习新范式——FedLLM。该方案突破传统参数平均&#x…...
的返回值机制与应用场景)
【Qt】深入解析QDialog::exec()的返回值机制与应用场景
1. QDialog::exec()的返回值机制解析 第一次接触Qt对话框编程时,我被exec()这个函数搞得一头雾水。明明调用了show()也能显示对话框,为什么还要用这个会"卡住"程序的exec()?后来在实际项目中踩过几次坑才明白,这个阻塞特…...

BlueROV2进阶:解锁Pixhawk飞控的舵机高级配置与实战调参
1. 认识BlueROV2与Pixhawk飞控的舵机控制基础 BlueROV2作为开源水下机器人的代表项目,其核心控制单元Pixhawk飞控的强大之处在于可编程性。很多朋友刚接触时会觉得"不就是让舵机动起来吗",但真正上手才发现机械爪这类执行机构对运动精度和范围…...

UniversalSplitScreen:让任何游戏都能分屏游玩的终极解决方案
UniversalSplitScreen:让任何游戏都能分屏游玩的终极解决方案 【免费下载链接】UniversalSplitScreen Split screen multiplayer for any game with multiple keyboards, mice and controllers. 项目地址: https://gitcode.com/gh_mirrors/un/UniversalSplitScree…...

基于Python的医院病历管理系统毕设
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在设计并实现一套基于Python的医院病历管理系统,以满足现代医院在病历管理方面的需求。具体研究目的如下:提高病历管理效率&…...