C++数据结构:图
目录
一. 图的基本概念
二. 图的存储结构
2.1 邻接矩阵
2.2 邻接表
三. 图的遍历
3.1 广度优先遍历
3.2 深度优先遍历
四. 最小生成树
4.1 最小生成树获取策略
4.2 Kruskal算法
4.3 Prim算法
五. 最短路径问题
5.1 Dijkstra算法
5.2 Bellman-Ford算法
5.3 Floyd-Warshall算法
六. 总结
一. 图的基本概念
图是一种由顶点集合以及顶点与顶点之间关系组成的数据结构,记为:G = { V, E }。
- 顶点集合V={x|x属于某个有穷非空集合}
- E = {(x,y)|x,y属于V}或者E={<x,y>|x,y属于V && Path(x,y)},其中(x,y)表示顶点x和y之间相连接,没有方向,<x,y>表示x连接到y,有方向。
如图1.1所示,A、B、C、D称之为顶点,连接顶点之间的“线”称其为边,边的箭头表示连接方向,图1.1左边的A->B连接线表示A连接到B,有方向,记为<A,B>,右边图结构中A-B表示A和B相连接,没有方向,记为(A,B)。
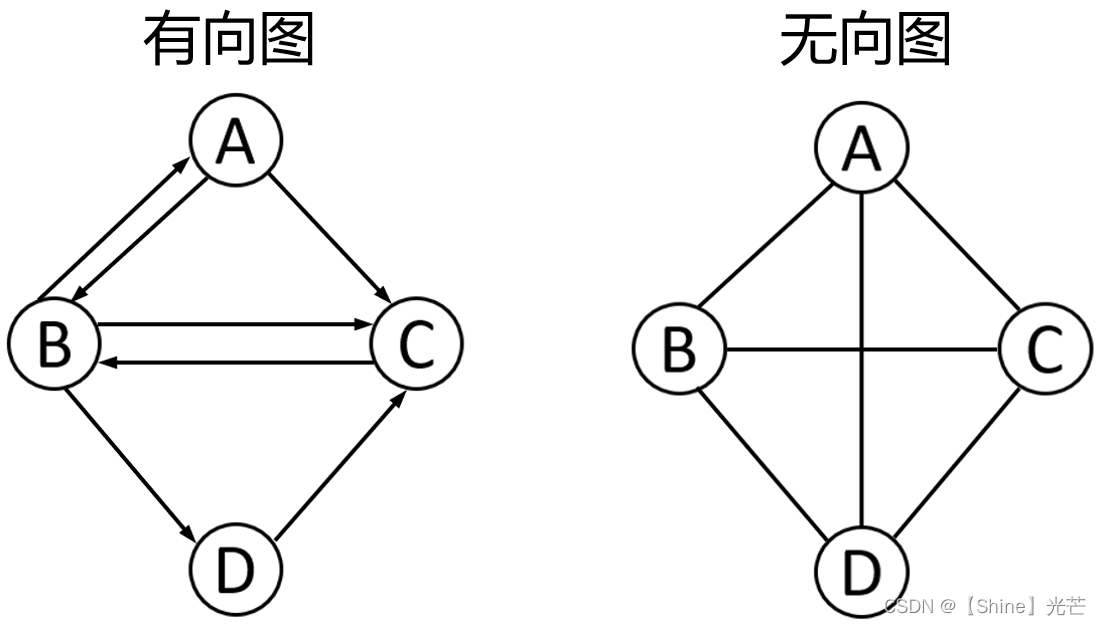
有向图与无向图:有向图中的顶点和顶点之间的连接具有方向性,如图1.1中左侧图结构所示,可以说顶点B连接到顶点D,但不可以说顶点D连接到顶点B,这是有向图结构。图1.1右侧的图结构是无向图,A和B之间有边相连,那我们可以认为A能够连接到B,B也能够连接到A。
完全图:在无向图中,假设顶点数量为N,那么有N*(N-1)/2,条边,即任意两个顶点之间都有边相连,那么就称其为无向完全图。在有向图中,任意两个顶点之间都有两条指向相反的连接线,即有N个顶点的有向图有N*(N-1)条边,称这样的图结构为有向完全图。

邻接顶点:在无向图中,如果(A,B)是一条边,那么我们称顶点A和顶点B邻接,在有向图中,如果<A,B>是一条边,则表示A连接到B,称顶点A邻接到顶点B,顶点B邻接自顶点A。
顶点的度:顶点的度指的是与顶点相连的边的条数,记为deg(V),表示顶点V的度。对于有向图,顶点V的度等于入度和出度之和,顶点V的出度指的是以V为起点的边的条数,记为outdev(V),顶点V的入度指以V为终点的边的条数,记为indev(V),那么deg(V) = outdev(V) + indev(V)。对于无向图,顶点的度与其出度和入度都相等,即deg(V) = outdev(V) = indev(V)。
路径:对于图G = { V, E },假设从顶点vi出发,经过一定的路径可以到顶点vj,那么从顶点vi到顶点vj所经过的顶点就称为顶点vi到顶点vj的路径。
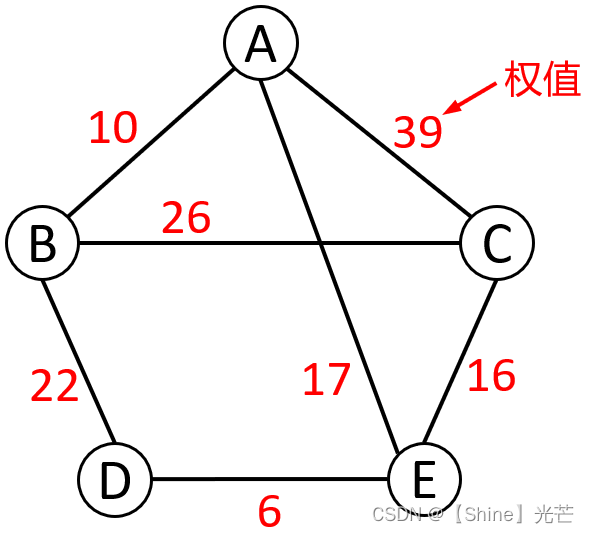
路径长度:对于不带权的图,路径长度就是从源顶点到目标顶点所经过的边的条数,对于带权值的图,从源顶点到目标顶点的路径长度就是每条边的权值之和。如图1.3所示,所谓权值,就是边的附属信息。
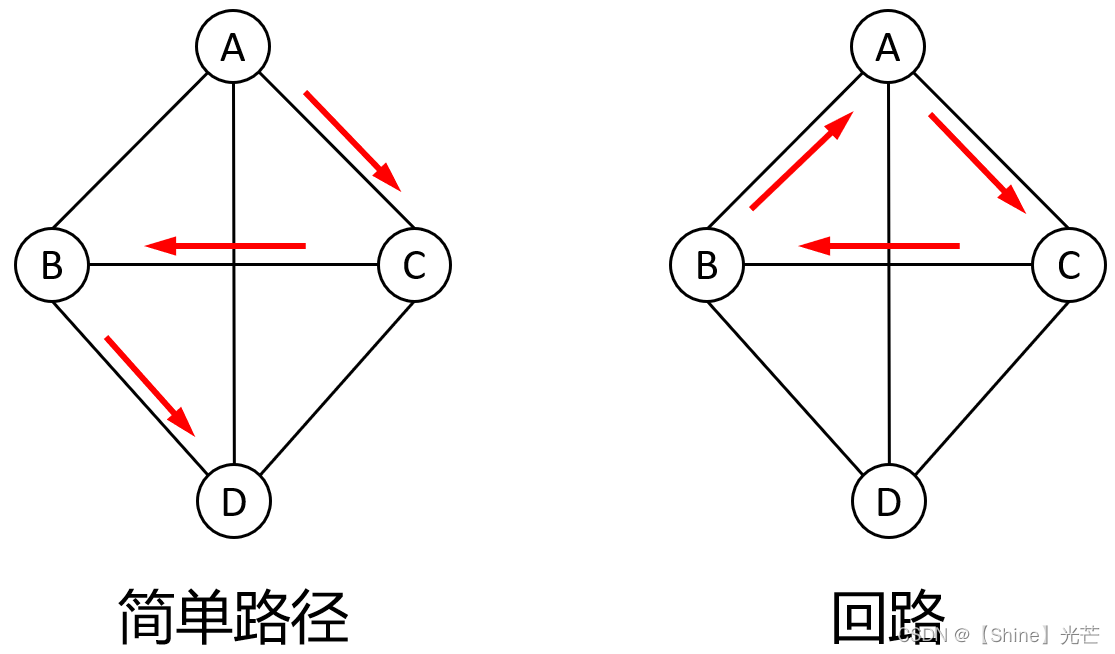
简单路径与回路:假设顶点v1和vm相连,路径v1, v2, ... , vm没有重复的顶点,那么称v1, v2, ... , vm为简单路径,如果v1,v2, ..., v1,路径从起始点开始又回到了起始点,那么就是回路。
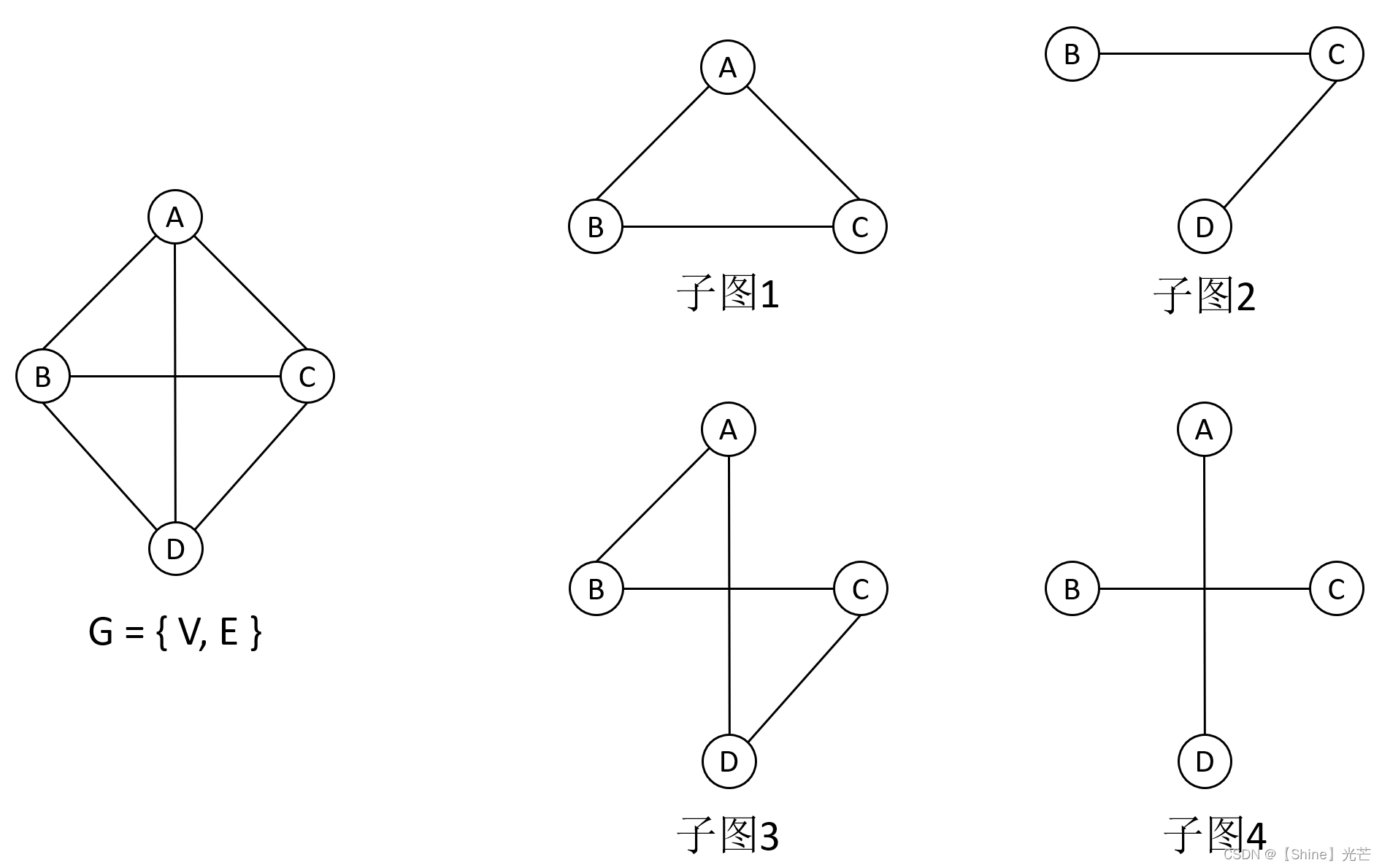
子图:对于图G = { V, E},有图G1 = { V1, E1 },且有:V1为V的子集,E1为E的子集,那么称G1为G的子图。
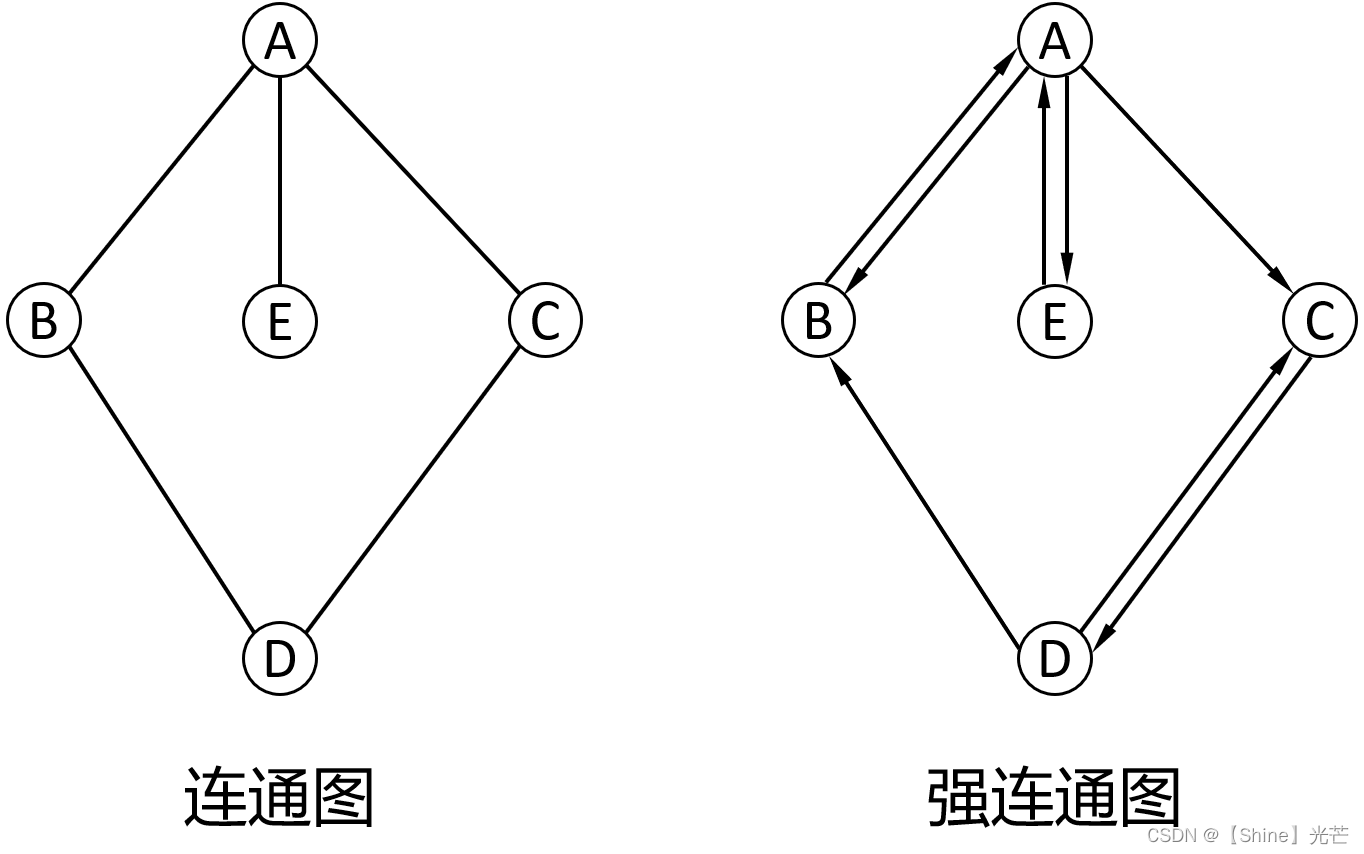
连通图:在无向图中,如果顶点vi与顶点vj之间能够通过一些边连接起来,那么称顶点vi与顶点vj是连通的,如果无向图中任意一对顶点都是连通的,那么称这种图结构为连通图。
强连通图:在有向图中,如果对于任意一对顶点vi和vj,既有从vi到vj的路径,也有从vj到vi的路径,那么这种图结构称为强连接图。
最小生成树:对于连通图,能够将每个顶点连接在一起的最小连通子图,称为最小生成树,对于有N个顶点的连通图,其最小生成树应该有N-1条边。
二. 图的存储结构
图的存储结构有两种:邻接矩阵和邻接表。
2.1 邻接矩阵
所谓邻接矩阵,就是一个二维数组。假设使用一维数组存储图中的每一个顶点,每一个顶点都有一个与之对应的在数组中的下标,将这个一维数组拓展到二维数组,就可以表示顶点和顶点之间的连接关系。假设邻接矩阵为M,那么M[i][j]就表示下标i对应的顶点和下标j对应的顶点的连接关系。
对于不带权值的图,如果矩阵中两个顶点相连接,即vi与vj相连,那么邻接矩阵中的M[i][j]=1,对于带权值的图,邻接矩阵中的值表示每条边的权重,如果两条边不相连,那么对应的邻接矩阵中的值就记为无穷大。对于无向图的邻接矩阵,是关于主对角线对称的矩阵。
邻接矩阵的优缺点:邻接矩阵能够快速查找两个顶点是否直接相连,但是如果边较少的时候,邻接矩阵中会有大量的浪费空间,且使用邻接矩阵不容易求得两个顶点之间的路径。

代码2.1为使用邻接矩阵进行存储的图结构的模板类代码实现。该类为模板类,模板参数有四个分别为:V表示图的顶点数据类型、W表示权值数据类型、MAX_W表示两顶点不相连时默认的权重,Direction表示该图是有向图还是无向图。
成员变量有三个:_vertex为记录顶点数据的一维数组,_valIndexMap为顶点数据与下标的映射哈希表,_edges为邻接矩阵。
先实现构造函数和顶点边添加函数,在构造函数中,应当将数组中给出的全部数据插入到_vertex中去,并且构造数据值和_vertex数组下标的映射关系。在边添加函数_AddEdges中,要传三个参数,分别为源顶点、目标顶点和权值,获取源顶点和目标顶点的下标,在临界矩阵中建立源顶点到目标顶点的连接,如果是无向图还要添加目标顶点到源顶点的连接。
为了方便观察,引入Print函数用于向屏幕打印邻接矩阵,以检查结果的正确性。
代码2.1:邻接矩阵存储图
#include <iostream>
#include <vector>
#include <unordered_map>
#include <cassert>namespace Matrix
{template<class V, class W, W MAX_W = INT_MAX, bool Direction = false>class Graph{public:// 构造函数,传递一维数组和数据个数Graph(const V* arr, size_t size){for (size_t i = 0; i < size; ++i){_vertex.push_back(arr[i]);_valIndexMap[arr[i]] = i;}// 为邻接矩阵申请空间并初始化_edges.resize(size, std::vector<W>(size, MAX_W));}// 顶点下标获取函数size_t GetIndex(const V& val){auto pos = _valIndexMap.find(val);if (pos != _valIndexMap.end()){return pos->second;}else{assert(false);return -1;}}// 边添加函数void AddEdge(const V& src, const V& dst, const W& w){// 获取源顶点和目标顶点对应的一维数组下标size_t srci = GetIndex(src);size_t dsti = GetIndex(dst);// 建立srci->dsti的连接关系_edges[srci][dsti] = w;// 如果是无向图,还需要建立dst->src的连接关系if (Direction == false){_edges[dsti][srci] = w;}}// 邻接矩阵打印函数void Print(){size_t n = _vertex.size();for (size_t i = 0; i < n; ++i){for (size_t j = 0; j < n; ++j){if (_edges[i][j] == MAX_W) std::cout << "* ";else std::cout << _edges[i][j] << " ";}std::cout << std::endl;}}private:std::vector<V> _vertex; // 存储顶点值的一维数组std::unordered_map<V, size_t> _valIndexMap; // 顶点值与其在数组下标中的映射关系std::vector<std::vector<W>> _edges; // 邻接矩阵};
}2.2 邻接表
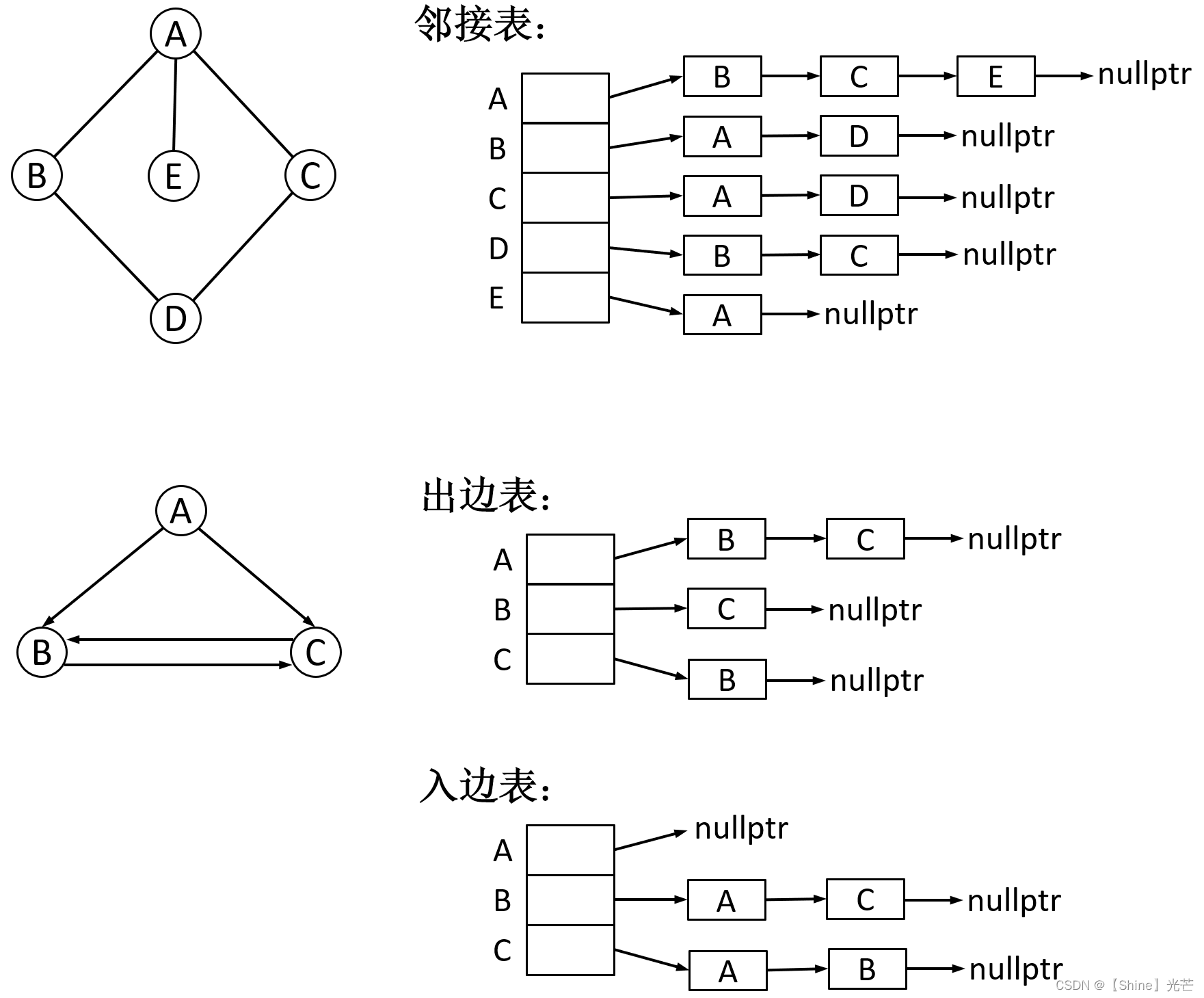
邻接表,就是对图中每一个顶点,都分配一个链表,链表中的每个顶点都表示一个与该顶点直接相连的顶点,如图2.2就是邻接表存储存储图的示意。对于无向图,只需要一张邻接表就能够清楚表示图结构。对于有向图,可以使用一张出边表和一张入边表,出边表记录以每个顶点为起始点的边连接到的顶点,入边表记录以每个顶点为终点的边的起始顶点,在实际应用中,使用一张出边表也能清晰表达有向图的结构,因此入边表一般省略。
使用邻接表的优缺点:邻接表适用于存储稀疏图,适用于查找一个顶点连接出去的边,但是无法像邻接矩阵那样以O(1)的时间复杂度判断两个顶点是否直接相连。
代码2.2对邻接表存储的图结构进行了初步的实现,定义struct Edge结构体来存储边,struct Edge包含三个成员:目标顶点下标_dsti、权值_w、下一个顶点_next。模板类class Graph的成员变量与邻接矩阵版的基本相同,区别就在于使用邻接表表示顶点间的连接关系,添加边函数AddEdge将新的连接边new出来的struct Edge对象头插到对应单链表处即可。
代码2.2:采用邻接表存储图
#include <iostream>
#include <vector>
#include <unordered_map>
#include <cassert>namespace LinkTable
{template<class W>struct Edge{size_t _dsti; // 目标顶点在数组中的下标W _w; // 权重struct Edge* _next; // 单链表下一个顶点// 构造函数Edge(size_t dsti, const W& w): _dsti(dsti), _w(w), _next(nullptr){ }};template<class V, class W, W MAX_W = INT_MAX, bool Direction = false>class Graph{typedef Edge<W> Edge;public:// 构造函数Graph(const V* arr, size_t size){// 将顶点插入一维数组,并建立顶点与下标的映射for (size_t i = 0; i < size; ++i){_vertex.emplace_back(arr[i]);_valIndexMap[arr[i]] = i;}// 初始化邻接表_edges.resize(size, nullptr);}// 顶点下标获取函数size_t GetIndex(const V& val){auto pos = _valIndexMap.find(val);if (pos != _valIndexMap.end()){return pos->second;}else{assert(false);return -1;}}// 添加边函数void AddEdge(const V& src, const V& dst, const W& w){// 获取源节点和目标节点的下标size_t srci = GetIndex(src);size_t dsti = GetIndex(dst);// 构建srci->dsti的连接关系Edge* edge1 = new Edge(dsti, w);edge1->_next = _edges[srci];_edges[srci] = edge1;// 如果是无向图,构建dsti->srci的连接关系if (Direction == false){Edge* edge2 = new Edge(srci, w);edge2->_next = _edges[dsti];_edges[dsti] = edge2;}}// 打印邻接表函数void Print(){size_t n = _edges.size();for (size_t i = 0; i < n; ++i){std::cout << _vertex[i] << ":";Edge* cur = _edges[i];while (cur){std::cout << "[" << _vertex[cur->_dsti] << ":" << cur->_w << "]" << "->";cur = cur->_next;}std::cout << "nullptr" << std::endl;}}private:std::vector<V> _vertex; // 存储顶点的一维数组std::unordered_map<V, size_t> _valIndexMap; // 数据和下标的映射关系哈希表std::vector<Edge*> _edges; // 邻接表表示的连接边};
}三. 图的遍历
3.1 广度优先遍历
广度优先遍历,我们可以理解为分层遍历,依次遍历每一层的顶点数目。在具体实现中使用队列进行辅助,先将起始顶点入队列,从队头开始遍历,将与队头直接相连且还未被遍历的顶点插入队尾,每次插入一个顶点,都要对这个顶点进行记录,以避免重复遍历。图3.1为广度优先遍历的分层情况,第0层遍历完成后遍历第1层,之后是第2层、第3层,以此类推。代码3.1在使用邻接矩阵存储的图结构中,实现对图的广度优先遍历。

代码3.1:图的广度优先遍历
// 图的广度优先遍历,src为遍历起点
void BFS(const V& src)
{size_t srci = GetIndex(src); // 起点下标size_t n = _vertex.size(); // 顶点个数std::vector<bool> visited(n, false); // 记录每个点是否被遍历(是否已经加入到队列中)std::queue<size_t> q; // 队列记录顶点下标q.push(srci); // 源顶点先入队列visited[srci] = true; // 记录源顶点已被加入队列size_t levelSize = 1; // 每层节点个数size_t level = 0;// 使用辅助队列,开始逐层执行广度优先遍历算法while (!q.empty()){printf("第%u层:", level++);for (size_t i = 0; i < levelSize; ++i){size_t u = q.front();q.pop();std::cout << _vertex[u] << " ";// 检查u->v的连接情况// 如果u->v相连,且v尚未被遍历,那么v入队列for (size_t v = 0; v < n; ++v){if (_edges[u][v] != MAX_W && visited[v] == false){visited[v] = true;q.push(v);}}}std::cout << std::endl;levelSize = q.size();}
}3.2 深度优先遍历
深度优先,就是选定一个原点后,就一直向下递归遍历,直到无法递归的时候就回溯,直到完成对于所有点的遍历,通过vector数组记录每个点是否被遍历。

代码3.2:图的深度优先遍历算法
// 深度优先遍历算法子函数
// curi为当前遍历节点的下标,visited为记录节点是否被遍历过的数组
void _DFS(size_t curi, std::vector<bool>& visited)
{visited[curi] = true;std::cout << _vertex[curi] << std::endl;// 检查是否有curi->u的连接// 如果u还未被遍历,那么就递归遍历执行深度优先算法for (size_t u = 0; u < _edges.size(); ++u){if (_edges[curi][u] != MAX_W && visited[u] == false){_DFS(u, visited);}}
}// 深度优先遍历函数,src为起始点
void DFS(const V& src)
{size_t srci = GetIndex(src); // 遍历源顶点下标size_t n = _vertex.size(); // 顶点个数std::vector<bool> visited(n, 0); // 记录每个节点是否被遍历过的数组_DFS(srci, visited);
}四. 最小生成树
4.1 最小生成树获取策略
所谓最小生成树,是对于无向连通图的概念,即:路径权值和最小的、连通的子图。这就要求最小生成树满以下条件:
- 如果原图有N个顶点,那么其最小生成树有N-1条边。
- 最小生成树中的边不能构成回路。
- 必须是满足前两个条件,边权值和最小的生成树。
获取最小生成树的算法有Kruskal算法(克鲁斯卡尔算法)和Prim算法(普里姆算法),这两种算法都是采用“贪心”策略,即寻找局部最优解,即:当前图中满足一定条件的权值最小的边。但是要注意,Kruskal算法和Prim算法都是局部贪心算法,能够取得局部最优解,但是不一定获取的是全局最优解,它们获取的结果只能说是非常接近于最小生成树,而不一定就是最小生成树。
4.2 Kruskal算法
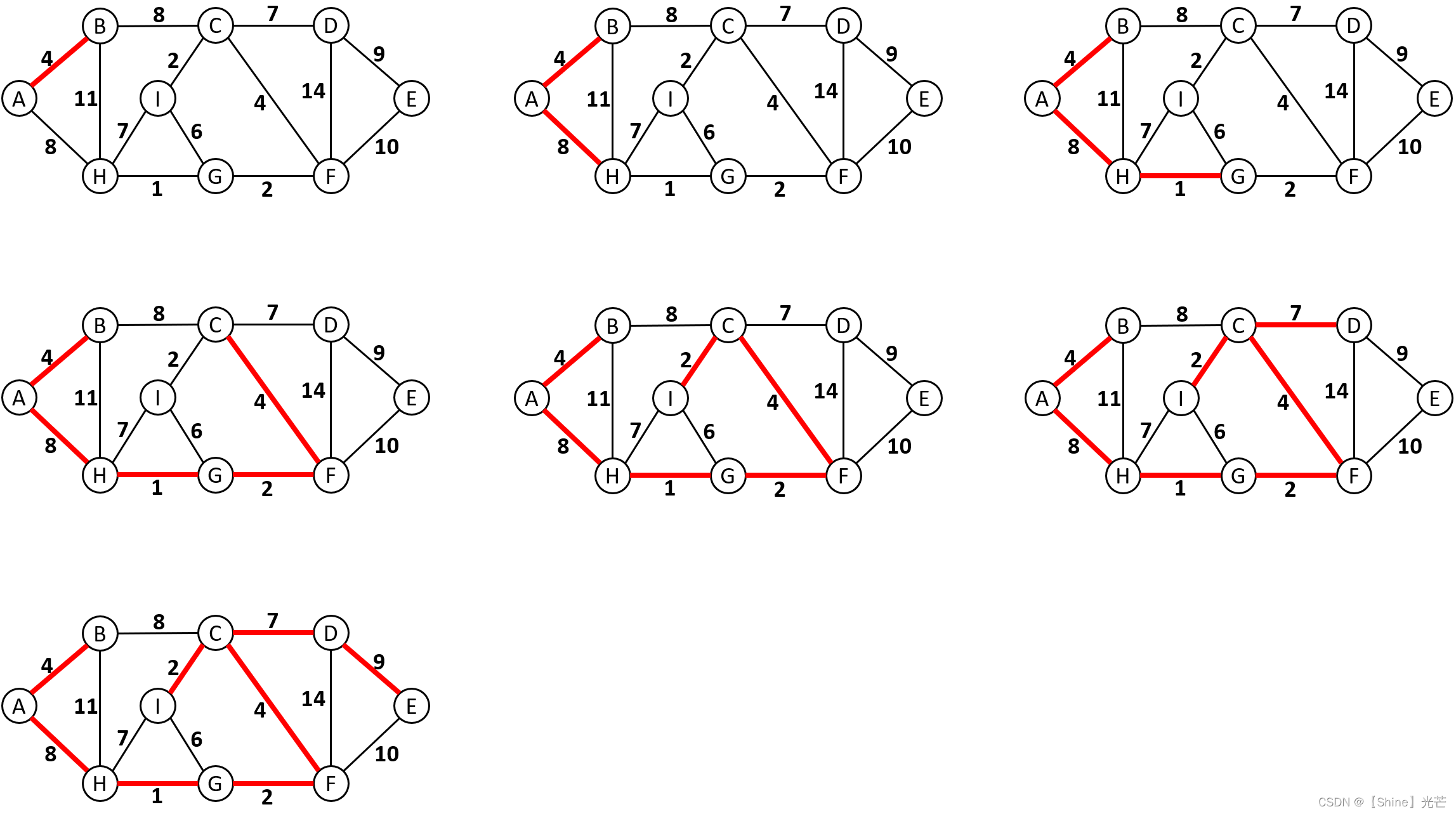
Kruskal算法的思想就是在整个图的所有边中,筛选出权值最小的边,同时在选边的过程中避免构成环,等到筛选出N-1条边后,就可以获取最小生成树。图4.1为Kruskal算法的选边过程,其中红色加粗的线为被选择的边。
Kruskal算法核心:每次都筛选权值最小的、且不构成回路的边,加入生成树。

通过Kruskal算法获取最小生成树需要使用 小根堆 + 并查集 来辅助进行,其中小根堆负责每次在所有尚未选取的边中筛选权值最小的边,并查集用于避免生成回路(环)。需要定义struct Edge类来记录边的属性信息,struct Edge的成员包括起始顶点下标srci、目标顶点下标dsti以及权重w,重载> 运算符,用于比较权重大小。在Kruskal算法的代码中首先要将所有的边插入小根堆,每次从堆顶拿出一条边,使用并查集检查两个顶点是否会构成环(属于同一个集合),如果不会构成环,那么就将这条边添加到生成树中去。之后,将此时的srci和dsti归并到并查集的同一集合中去以避免成环,然后选边计数器+1,进行权重累加。假设总共有N个顶点,如果选出生成树有N-1条边,说明成功获得了最小生成树,返回每个边的权重之和,否则就是获取最小生成树失败,返回MAX_W。
代码4.1为Kruskal算法及其配套被调函数及自定义类型的实现,其中Graph的其余不相关函数省略,代码4.2为并查集的实现代码。
代码4.1:Kruskal算法及其配套被调函数及自定义类型的实现
#include "UnionFindSet.hpp"
#include <iostream>
#include <vector>
#include <queue>
#include <unordered_map>
#include <algorithm>
#include <cassert>namespace Matrix
{// 自定义类型 -- 顶点与顶点之间的边template<class W>struct Edge{size_t _srci; // 源顶点下标size_t _dsti; // 目标顶点下标W _w; // 权重// 构造函数Edge(size_t srci, size_t dsti, const W& w): _srci(srci), _dsti(dsti), _w(w){ }// 大于比较运算符重载函数,用于构建小根堆bool operator>(const Edge<W>& w) const{return _w > w._w;}};template<class V, class W, W MAX_W = INT_MAX, bool Direction = false>class Graph{typedef Edge<W> Edge;typedef Graph<V, W, MAX_W, Direction> Self;public:// 强制生成默认构造函数Graph() = default;// ....// 与Kruskal算法不相关的成员函数全部省略// 根据下标添加边的函数void _AddEdge(size_t srci, size_t dsti, const W& w){_edges[srci][dsti] = w;if (Direction == false){_edges[dsti][srci] = w;}}// Kruskal算法获取最小生成树// 返回值为最小生成树的权值和,minTree为输出型参数,用于获取最小生成树// 如果无法获取最小生成树,那么就返回MAX_WW Kruskal(Self& minTree){// 初始化minTree中的每个成员size_t n = _vertex.size();minTree._vertex = _vertex;minTree._valIndexMap = _valIndexMap;minTree._edges.resize(n, std::vector<W>(n, MAX_W));// 将所有边的信息(源顶点、目标顶点、权值)插入到小根堆中去std::priority_queue<Edge, std::vector<Edge>, std::greater<Edge>> minHeap;for (size_t i = 0; i < n; ++i){for (size_t j = i + 1; j < n; ++j){if (_edges[i][j] != MAX_W){Edge edge(i, j, _edges[i][j]);minHeap.emplace(edge);}}}UnionFindSet ufs(n); // 用于避免构成回路的并查集size_t count = 0; // 计数器,用于统计选取了多少条边W totalW = W(); // 总权值计数器std::cout << "Kruskal开始选边:" << std::endl;while (!minHeap.empty()){// 小根堆堆顶为当前尚未被筛选且权值最小的边size_t srci = minHeap.top()._srci;size_t dsti = minHeap.top()._dsti;size_t w = minHeap.top()._w;minHeap.pop();// 检查当前两个节点是否位于同一并查集的几何中if (!ufs.InSet(srci, dsti)){std::cout << "[" << _vertex[srci] << "->" << _vertex[dsti] << "]:" << w << std::endl;// 向最小生成树中添加srci->dsti的边minTree._AddEdge(srci, dsti, w);// 将srci和dsti归为同一集合ufs.Union(srci, dsti);// 选边计数器+1,权值累加++count;totalW += w;}else{std::cout << "构成环 " << "[" << _vertex[srci] << "->" << _vertex[dsti] << "]:" << w << std::endl;}}// 如果选择了n-1条边,那么说明获取了最小生成树,否则获取最小生成树失败if (count == n - 1) {return totalW;}else {return MAX_W;}}private:std::vector<V> _vertex; // 存储顶点值的一维数组std::unordered_map<V, size_t> _valIndexMap; // 顶点值与其在数组下标中的映射关系std::vector<std::vector<W>> _edges; // 邻接矩阵};
}代码4.2:并查集(UnionFindSet.hpp头文件)
#pragma once#include <vector>
#include <algorithm>class UnionFindSet
{
public:UnionFindSet(size_t n):_ufs(n, -1){}void Union(int x1, int x2){int root1 = FindRoot(x1);int root2 = FindRoot(x2);// 如果本身就在一个集合就没必要合并了if (root1 == root2)return;// 控制数据量小的往大的集合合并if (abs(_ufs[root1]) < abs(_ufs[root2]))std::swap(root1, root2);_ufs[root1] += _ufs[root2];_ufs[root2] = root1;}int FindRoot(int x){int root = x;while (_ufs[root] >= 0){root = _ufs[root];}// 路径压缩while (_ufs[x] >= 0){int parent = _ufs[x];_ufs[x] = root;x = parent;}return root;}// 检查两个节点是否属于同一集合bool InSet(int x1, int x2){return FindRoot(x1) == FindRoot(x2);}// 获取并查集中集合的数量size_t SetSize(){size_t size = 0;for (size_t i = 0; i < _ufs.size(); ++i){if (_ufs[i] < 0){++size;}}return size;}private:std::vector<int> _ufs;
};4.3 Prim算法
Prim算法(普里姆算法)的思路与Kruskal算法基本一致,采用的都是贪心策略,与Kruskal算法不同的是,Prim算法会选定一个起始点src,并将已经连通的顶点和尚未被连通的顶点划分到两个集合中去,分别记为S和U,每一次筛选,都会选出从si->ui的边中权值最小的那个,由于对已经连通和尚未连通的顶点进行了划分,因此选边建立连接的过程中不需要并查集来辅助就能够避免成环。图4.3为Prim算法的选边过程,红色加粗的实线为被选择的边。
代码4.3:Prim算法的实现
// Prim算法获取最小生成树
W Prim(const V& src, Self& minTree)
{// 初始化minTree中的每个成员size_t n = _vertex.size();minTree._vertex = _vertex;minTree._valIndexMap = _valIndexMap;minTree._edges.resize(n, std::vector<W>(n, MAX_W));// 起始节点对应下标size_t srci = GetIndex(src);// visited记录每个顶点是否已经被连通了起来std::vector<bool> visited(n, false);visited[srci] = true; // 源顶点自身连通// 用于选取最短边的小根堆std::priority_queue<Edge, std::vector<Edge>, std::greater<Edge>> minHeap;// 将以srci为起点的边添加到小根堆中去for (size_t i = 0; i < n; ++i){if (_edges[srci][i] != MAX_W){// Edge edge(srci, i, _edges[srci][i]);// minHeap.push(edge);minHeap.emplace(srci, i, _edges[srci][i]);}}size_t count = 0; // 选边计数器W totalW = W(); // 权值之和std::cout << "Prim开始选边:" << std::endl;// 开始依次选边while (!minHeap.empty()){// 取当前边的起点为u,终点为v,权重为wsize_t u = minHeap.top()._srci;size_t v = minHeap.top()._dsti;W w = minHeap.top()._w;minHeap.pop();// 检查建立u->v的连接后,是否会构成环if (visited[v] == false) // 不会构成环{std::cout << "[" << _vertex[u] << "->" << _vertex[v] << "]:" << w << std::endl;// 在minTree中建立u->v的连接minTree._AddEdge(u, v, w);// 记顶点v被选取,选边计数器+1,权值累加visited[v] = true;++count;totalW += w;// 将以v为起点的边添加到小根堆minHeap中去for (size_t k = 0; k < n; ++k){if (visited[k] == false && _edges[v][k] != MAX_W){// Edge edge(v, k, _edges[v][k]);// minHeap.push(edge);minHeap.emplace(v, k, _edges[v][k]);}}}else{std::cout << "构成环 " << "[" << _vertex[u] << "->" << _vertex[v] << "]:" << w << std::endl;}}if (count + 1 == n) {return totalW;}else {return MAX_W;}
}五. 最短路径问题
最短路径,就是计算从任意顶点vi到vj所经过的路径,权值和最小的那条路径。
5.1 Dijkstra算法
Dijkstra算法(迪杰斯特拉算法),用于求单源最短路径,即:给定一个起点,计算以这个顶点为起点,图中其余任意顶点为终点的路径中,权值之和最小的那一条路径。注意,Dijkstra算法要求不能带有负权值。
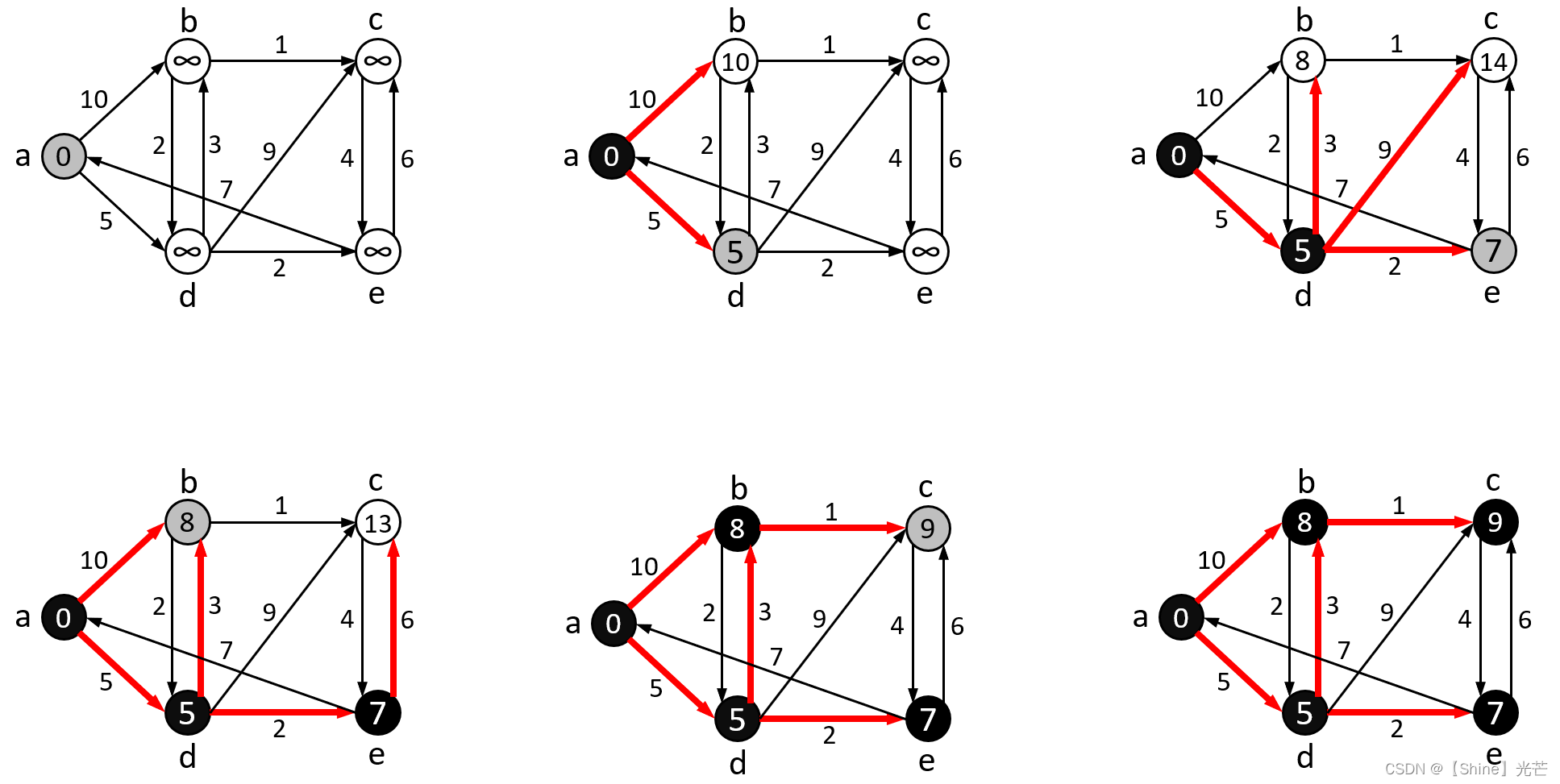
Dijkstra算法的核心思想是贪心算法,其大致的流程为:将一个有向图G中的顶点分为S和Q两组,其中S为已经确定了最短路径的顶点,Q为尚未确定最短路径的顶点,最初先将处源顶点srci以外所有顶点都加入Q,源顶点srci加入S。每次从Q中找出一个源顶点到该顶点最小的顶点u,将其从Q中移出放入到S中,对与u相邻的顶点v进行松弛操作。所谓松弛操作,就是比较srci->u + s->v的和是否比原来srci->v的路径和小,如果是,那么就更新srci->v的最短路径,反复进行松弛操作,直到Q集合中没有顶点。图5.1为Dijkstra算法松弛迭代的过程,黑色填充的顶点为已经确定最短路径的顶点,灰色填充为本轮遍历的源顶点。
代码5.1为Dijkstra算法的具体实现,该函数接收三个参数,分别为起始点、最小路径dist(输出型参数)、每个顶点的父亲顶点pPath(输出型参数),这里使用pPath的目的是为了避免存储全部的路径,达到节省空间,降低算法编码难度的目的。为了观察结果,实现了PrintPath函数,用于打印顶点src到任意顶点的最短路径。
代码5.1:Dijkstra算法的实现
// Dijkstra求最小生成树
// dist为路径和,pPath为每个顶点前导顶点的下标
void Dijkstra(const V& src, std::vector<W>& dist, std::vector<size_t>& pPath)
{// 初始化dist和pPath数组size_t n = _vertex.size();dist.resize(n, MAX_W);pPath.resize(n, -1);size_t srci = GetIndex(src); // 起始顶点的下标dist[srci] = 0;pPath[srci] = srci;// visited数组记录每个顶点是否已经可以确定最短路径std::vector<bool> visited(n, false);// visited[srci] = true;// 开始选边迭代for (size_t k = 0; k < n; ++k){// 挑选出尚未确定最短路径的顶点中,离srci最近的顶点,记下标为usize_t u = -1;W minDist = MAX_W;for (size_t i = 0; i < n; ++i){if (visited[i] == false && dist[i] < minDist){u = i;minDist = dist[i];}}// 将u添加到已经确定最小路径和的集合中去visited[u] = true;// 检查u->v + dist[u]是否比原来的dist[v]小// 如果小,那么更新dist[v]的值for (size_t v = 0; v < n; ++v){if (visited[v] == false && _edges[u][v] != MAX_W &&dist[u] + _edges[u][v] < dist[v]){dist[v] = dist[u] + _edges[u][v];pPath[v] = u;}}}
}// 路径打印函数
void PrintPath(const V& src, const std::vector<W>& dist, const std::vector<size_t>& pPath)
{size_t srci = GetIndex(src);size_t n = pPath.size();for (size_t i = 0; i < n; ++i){std::vector<int> path;size_t parent = i;while (pPath[parent] != parent){path.push_back(parent);parent = pPath[parent];}path.push_back(srci);std::reverse(path.begin(), path.end());for (const auto x : path){std::cout << _vertex[x] << "->";}std::cout << "权重:" << dist[i] << std::endl;}
}5.2 Bellman-Ford算法
Dijkstra算法不能解决带有负权的图的问题,为此,Bellman-Ford算法(贝尔曼-福特算法)被提了出来,这种算法可以解决带有负权的图的最小路径问题,这种算法也是用于解决单源最短路径问题的,即:给定一个起始点src,获取从src到每一个顶点的最短路径。
Bellman-Ford算法实际上是一种暴力求解的算法,对于有N个顶点的图,要暴力搜索顶点vi和顶点vj,迭代更新最短路径。Bellman-Ford算法的时间复杂度为O(N^3),而Dijkstra算法的时间复杂度为O(N^2),因此对于不带有负权的图,应当使用Dijkstra求最短路径而非使用Bellman-Ford算法。
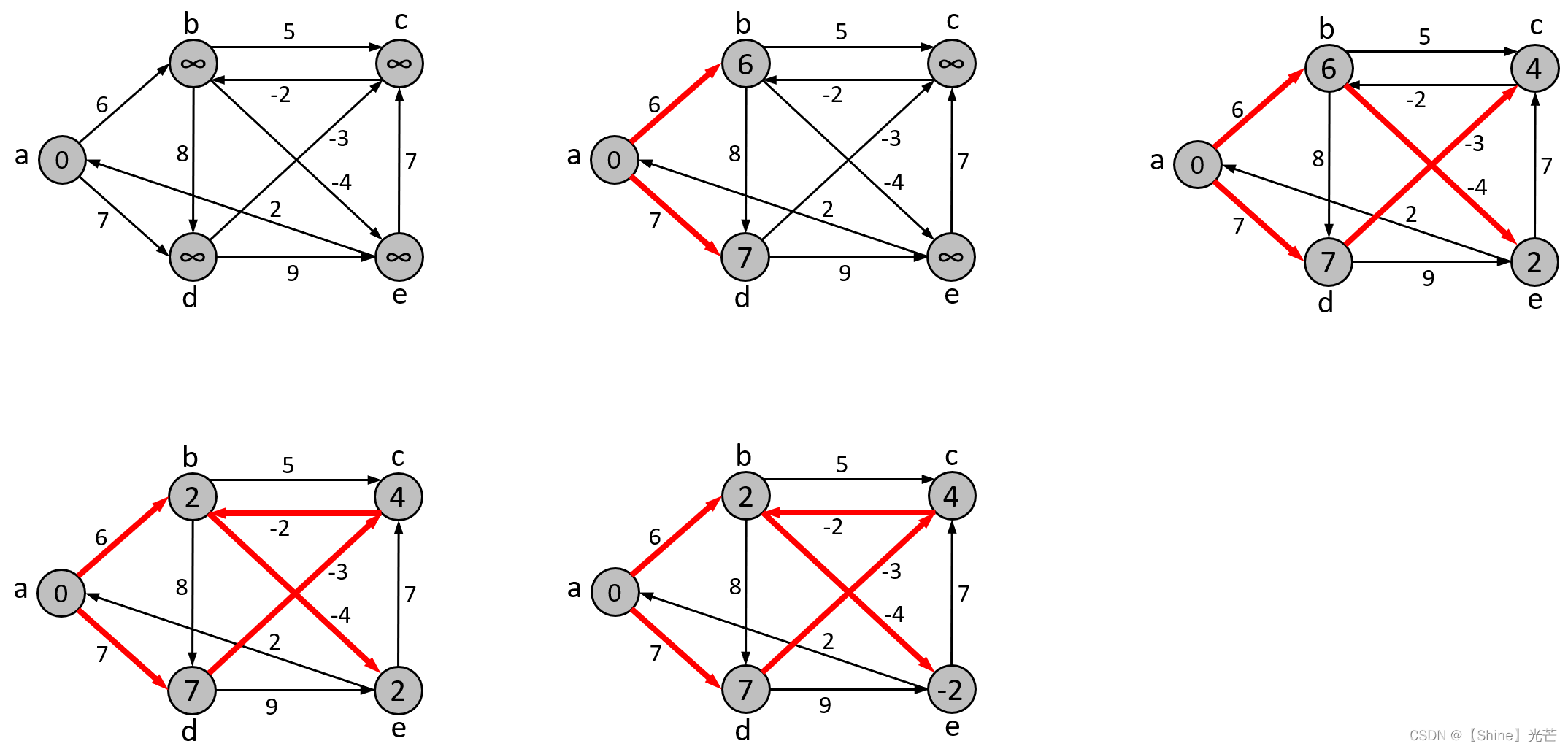
但是,Bellman-Ford算法无法解决负权回路,所谓负权回路,就是图结构中的某个环,其所有边的权值累加起来小于0,就是负权回路。如图5.3所示的图,a->b->d->a就是一个负权回路,a->b->d->a的权值加起来为-2,这样就存在一种诡异的现象,即每一次从a出发再回到a,路径权值之和都会变小,这样理论上a->a的路径可以无限小,对于存在负权回路的图,没有任何办法可以解决其最小路径问题!

代码5.2:Bellman-Ford算法的实现
// BellmanFord 算法获取单源最短路径
bool BellmanFord(const V& src, std::vector<W>& dist, std::vector<size_t>& pPath)
{// 初始化输出型参数size_t n = _vertex.size();dist.resize(n, MAX_W);pPath.resize(n, -1);size_t srci = GetIndex(src); // 源顶点对应的下标dist[srci] = 0; // srci->srci距离为0pPath[srci] = srci; // 原顶点的前导节点记为其自身for (size_t k = 0; k < n; ++k){// 遍历节点i和节点j,更新迭代for (size_t i = 0; i < n; ++i){for (size_t j = 0; j < n; ++j){if (dist[i] != MAX_W && _edges[i][j] != MAX_W &&dist[i] + _edges[i][j] < dist[j]){dist[j] = dist[i] + _edges[i][j];pPath[j] = i;}}}}// 检查是否有负权回路,如果有返回false,否则返回truefor (size_t i = 0; i < n; ++i){for (size_t j = 0; j < n; ++j){if (_edges[i][j] != MAX_W && dist[i] + _edges[i][j] < dist[j]){return false;}}}return true;
}5.3 Floyd-Warshall算法
Floyd-Warshall算法(弗洛伊德算法),是用于计算多源最短路径的算法,其基本原理为三维动态规划算法:
设为,从顶点i到定点j,仅以 {1,2,...,k}顶点为中间顶点的情况下的最短路径和。
- 若i->j的最短路径经过k,那么
- 如i->j的最短路径不经过k,那么
状态转移方程为:
Floyd-Warshall算法的本质是三维动态规划算法,D[i][j][k]表示的是从顶点i到顶点j,在只经过0~k个中间顶点的情况下的最短路径。通过优化将最后一维k优化掉,这是只需要二维数组D[i][j]就可以计算出多源最短路径,Floyd-Warshall算法的时间复杂度为O(N^3),空间复杂度为O(N^2),且Floyd-Warshall算法可以解决带有负权的图的问题。
代码5.3:Floyd-Warshall算法的实现
// FloydWarshall算法计算多源最短路径
void FloydWarshall(std::vector<std::vector<W>>& vvDist, std::vector<std::vector<size_t>>& vvPath)
{// 初始化记录路径和的数组和记录前导节点的数组size_t n = _vertex.size();vvDist.resize(n, std::vector<W>(n, MAX_W));vvPath.resize(n, std::vector<size_t>(n, -1));// 将图中直接相连的边添加到vvDist和vvPath中去for (size_t i = 0; i < n; ++i){for (size_t j = 0; j < n; ++j){if (_edges[i][j] != MAX_W){vvDist[i][j] = _edges[i][j];vvPath[i][j] = i;}if (i == j){vvDist[i][j] = 0;vvPath[i][j] = i;}}}// 三维数组动态规划查找多源最短路径for (size_t k = 0; k < n; ++k){bool change = false;for (size_t i = 0; i < n; ++i){for (size_t j = 0; j < n; ++j){if (vvDist[i][k] != MAX_W && vvDist[k][j] != MAX_W &&vvDist[i][k] + vvDist[k][j] < vvDist[i][j]){change = true;vvDist[i][j] = vvDist[i][k] + vvDist[k][j];vvPath[i][j] = vvPath[k][j];}}}if (change == false){break;}}
}六. 总结
- 图是一种存储顶点和边的数据结构,记为G={V,E},图还可以细分为带权图和无权图、有向图和无向图。
- 图的存储结构有邻接表和邻接矩阵两种格式,这两种方式各有优劣,但对于稠密图,一般使用邻接矩阵。
- 最小生成树是在无向连通图中,能够将每个顶点连接起来的、边权值和最小的子树,通过Kruskal算法和Prim算法可以获取最小生成树,这两种算法的策略都是局部贪心。
- Dijkstra算法和Bellman-Ford算法可以计算单源最短路径问题,Dijkstra算法无法计算带负权的图的最小路径,Bellman-Ford算法可以解决负权问题,但是Dijkstra算法的时间复杂度为O(N^2),Bellman-Ford算法的时间复杂度为O(N^3)。
- Floyd-Warshall算法用于计算多源最短路径问题,这种算法的思想是动态规划,可以解决负权问题,时间复杂度为O(N^3)。
相关文章:
C++数据结构:图
目录 一. 图的基本概念 二. 图的存储结构 2.1 邻接矩阵 2.2 邻接表 三. 图的遍历 3.1 广度优先遍历 3.2 深度优先遍历 四. 最小生成树 4.1 最小生成树获取策略 4.2 Kruskal算法 4.3 Prim算法 五. 最短路径问题 5.1 Dijkstra算法 5.2 Bellman-Ford算法 5.3 Floyd-…...

「C++」红黑树的插入(手撕红黑树系列)
💻文章目录 📄前言红黑树概念红黑树的结构红黑树节点的定义红黑树的定义红黑树的调整 红黑树的迭代器迭代器的声明operator( )opeartor--( ) 完整代码 📓总结 📄前言 作为一名程序员相信你一定有所听闻红黑树的大名,像…...

2023年生肖在不同时间段的运势预测
随着信息技术的飞速发展,API已经成为了数据获取和交互的重要途径。很多网站和APP都在运用API来获取数据。今天我们来介绍一个十分有趣的API——《十二生肖运势预测API》,通过这个API,我们可以获取到每个生肖在不同时间段的运势预测࿰…...
ERRO报错
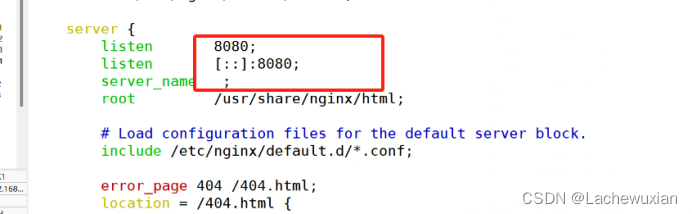
无法下载nginx 如下解决: 查看是否有epel 源 安装epel源 安装第三方 yum -y install epel-release.noarch NGINX端口被占用 解决: 编译安装的NGINX配置文件在/usr/local/ngin/conf 修改端口...

shiyan
import javax.xml.transform.Result; import java.util.Arrays; public class ParseText {//需要统计的字符串为private String text"Abstract-This paper presents an overview";private Result[] res;private int count;public ParseText(){resnew Result[100];cou…...
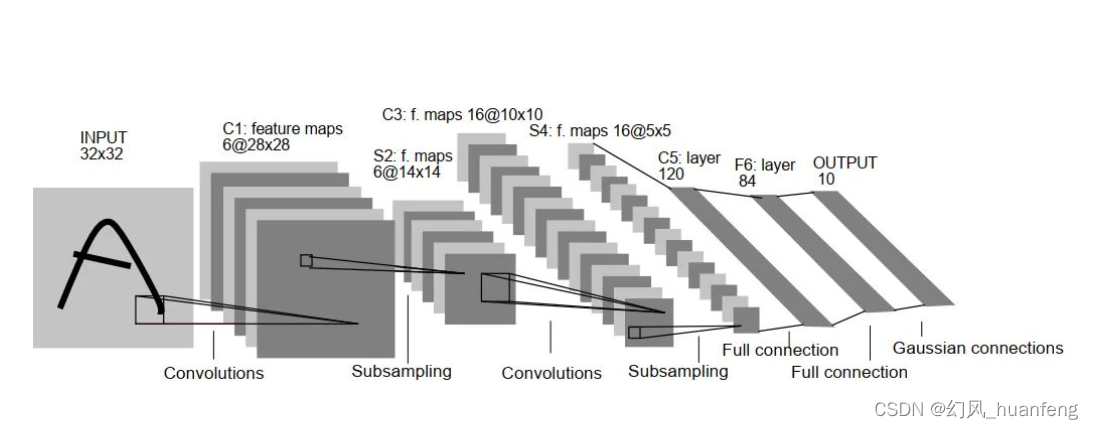
深度学习黎明时期的LeNet:揭开卷积神经网络的序幕
在深度学习的历史长河中,Yann LeCun 的 LeNet 是一个里程碑式的研究成果,它为后来的卷积神经网络(Convolutional Neural Networks,CNN)的发展奠定了基础。LeNet 的诞生标志着深度学习黎明时期的到来,为人工…...
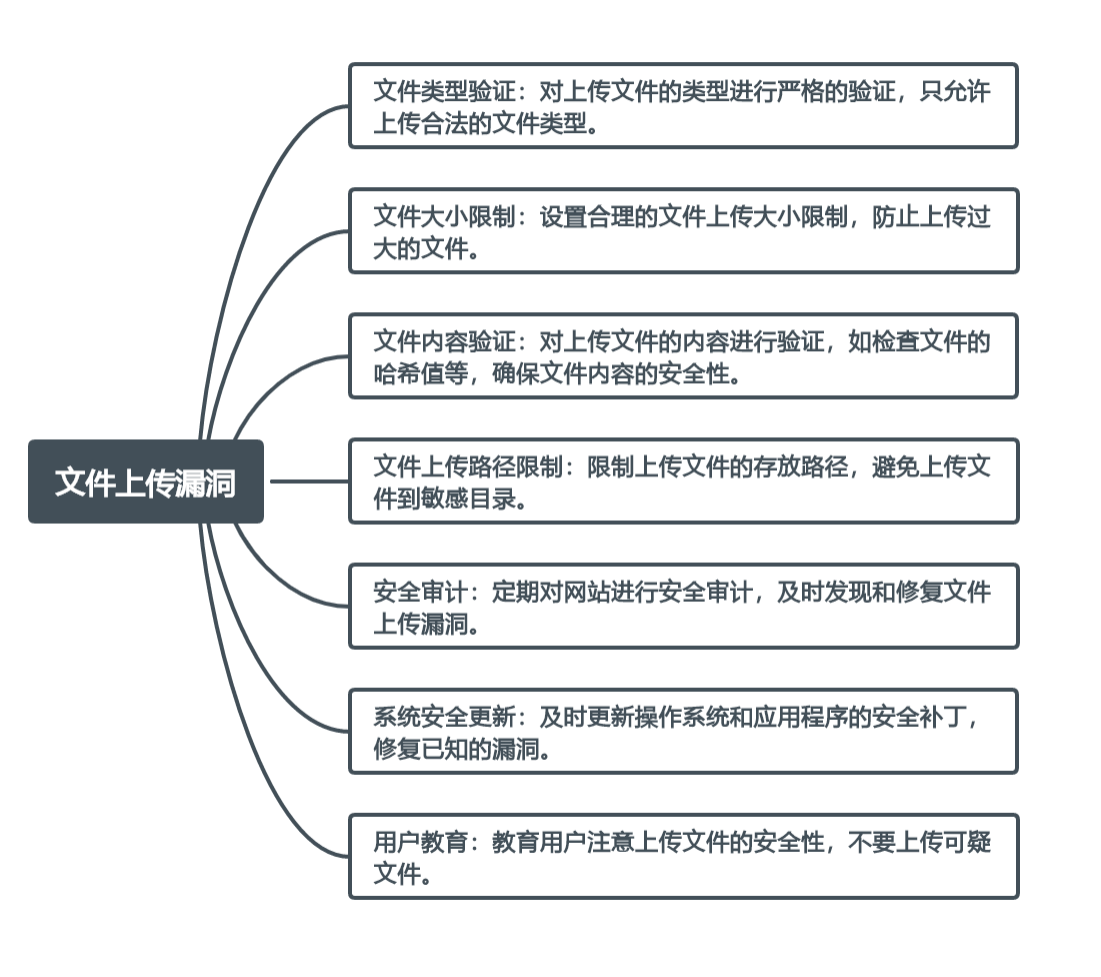
跨越威胁的传说:揭秘Web安全的七大恶魔
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...

【SpringCloud系列】@FeignClient微服务轻舞者
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...
)
【数据库设计和SQL基础语法】--SQL语言概述--SQL的基本结构和语法规则(一)
一、SQL的基本结构 2.1 SQL语句的组成要素 SQL语句的组成要素 关键字(Keywords): 定义:SQL语句的基本操作命令,表示要执行的动作。例子:SELECT、INSERT、UPDATE、DELETE等。 标识符(Identifiers…...

使用oxylabs代理国外ip请求openai接口报错记录
报错提示: curl: (35) TCP connection reset by peer curl: (56) Recv failure: Connection reset by peer 这些报错都是因为curl版本过低(我的版本是curl 7.29.0 (x86_64-redhat-linux-gnu) libcurl/7.29.0 NSS/3.53.1 zlib/1.2.7 libidn/1.28 libssh2…...
搜索引擎语法
演示自定的Google hacking语法,解释含意以及在渗透过程中的作用 Google hacking site:限制搜索范围为某一网站,例如:site:baidu.com ,可以搜索baidu.com 的一些子域名。 inurl:限制关键字出现在网址的某…...

@ResponseBody详解
ResponseBody() 作用: responseBody注解的作用是将controller的方法返回的对象通过适当的转换器转换为指定的格式之后,写入到response对象的body区,通常用来返回JSON数据或者是XML数据。 位置: ResponseBody是作用在方法上的&…...

一些关于开关电源经典回答
1、开关电源变压器如果用铜带取代漆包线,其允许通过的电流怎么算?比如说厚度为0.1mm的铜带,允许通过的电流怎么算? 专家:如果开关电源变压器用铜带取代漆包线,铜带(漆包线)的涡流损耗可以大大将小,工作频率可以相应…...

Linux-文件夹文件赋权、文件指定修改用户和用户组
Linux-文件夹文件赋权、文件指定修改用户和用户组 文件权限说明文件夹文件赋权chmod命令chmod示例以数字方式修改权限给指定目录赋权给当前目录的所有子文件夹和文件赋权 chown修改属主、属组 文件权限说明 文件或目录的权限位是由9个权限位来控制的,每三位一组&am…...
【Java】7. 类型转换和类型判断
7. 类型转换 7.1 基本类型转换 顺箭头:隐式转换(自动) 逆箭头:强制转换(可能造成精度丢失) byte a 10; int b a; int c 1000; byte d (byte) c; System.out.println(d); // -24 7.2 包装类型与基…...
)
c语言练习12周(15~16)
编写int fun(char s[])函数,返回字串中所有数字累加和 题干编写int fun(char s[])函数,返回字串中所有数字累加和。 若传入串"k2h3yy4x"返回整数9;若传入串"uud9a6f7*"返回整数22 //只填写要求的函数 int fun(cha…...
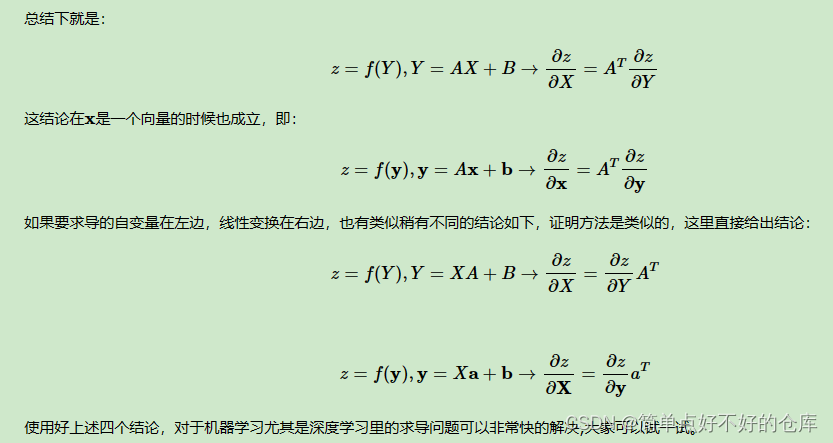
2023-简单点-机器学习中矩阵向量求导
机器学习中矩阵向量求导的概念是什么? 在机器学习中,矩阵向量求导的概念主要涉及对函数中的矩阵或向量参数进行求导运算。这种求导运算可以帮助我们了解函数值随参数的变化情况,进而应用于优化算法中。具体来说,当损失函数是一个…...
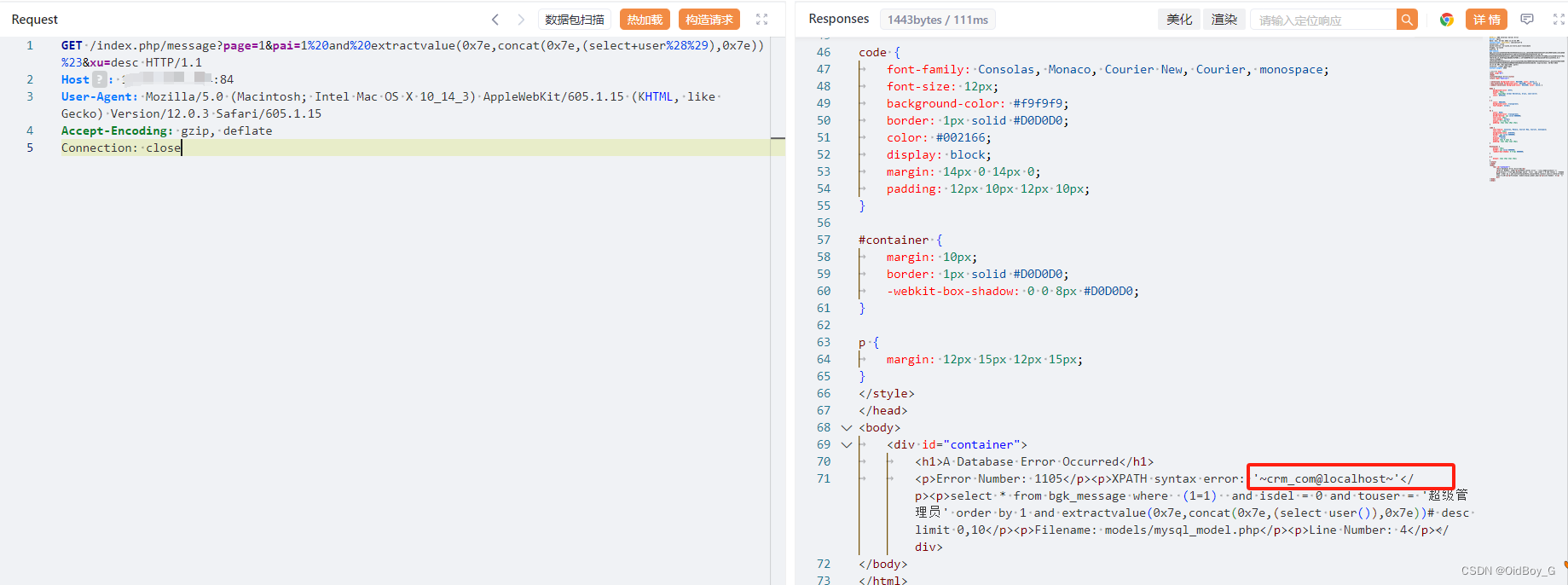
帮管客CRM SQL注入漏洞复现
0x01 产品简介 帮管客CRM是一款集客户档案、销售记录、业务往来等功能于一体的客户管理系统。帮管客CRM客户管理系统,客户管理,从未如此简单,一个平台满足企业全方位的销售跟进、智能化服务管理、高效的沟通协同、图表化数据分析帮管客颠覆传…...

如何编写自己的python包,并在本地进行使用
如何编写自己的python包,并在本地进行使用 一、直接引用 1.创建Python项目pythonProject。 2.并且在此项目下创建pg_message包。 3.pg_message包下默认生成_init_.py文件。 Python中_init_.py是package的标志。init.py 文件的一个主要作用是将文件夹变为一个Python模块,Pyt…...
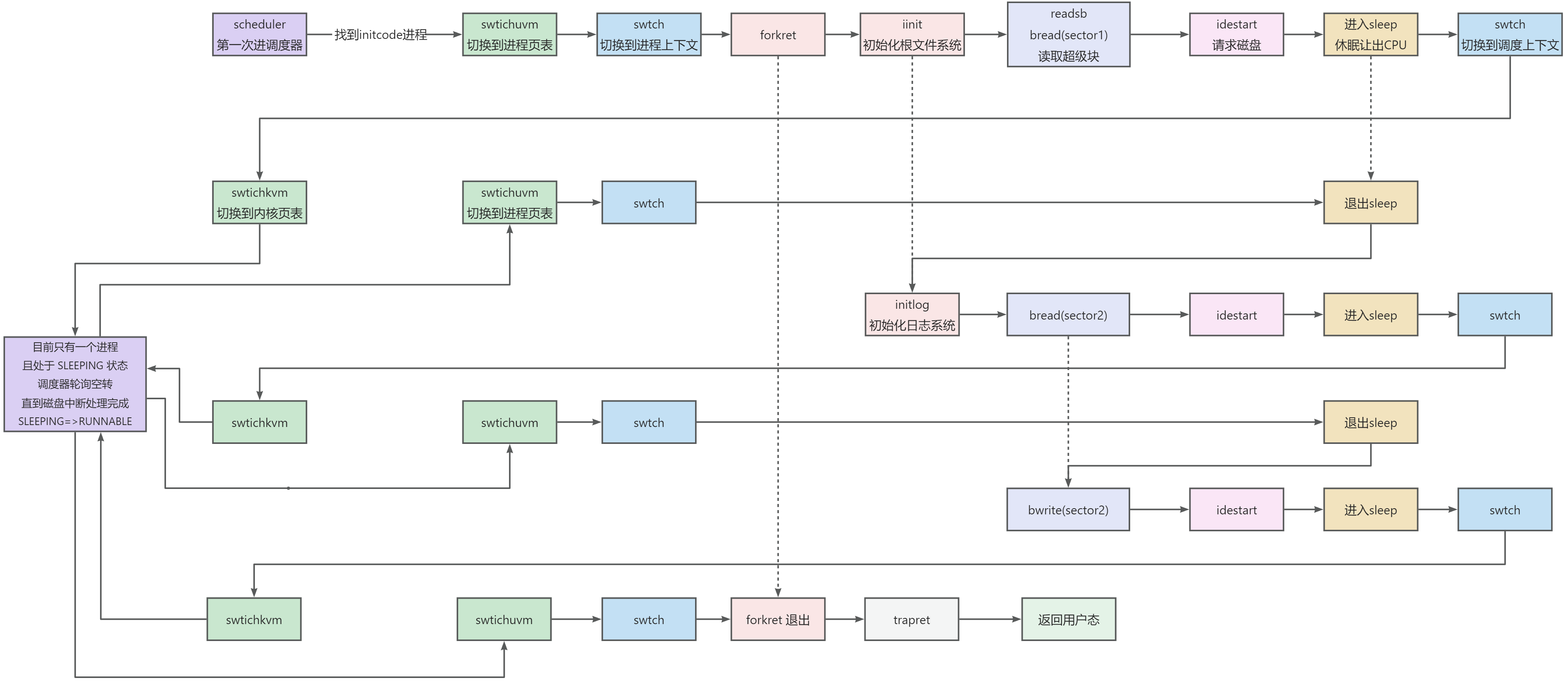
xv6 磁盘中断流程和启动时调度流程
首发公号:Rand_cs 本文讲述 xv6 中的一些细节流程,还有对之前文中遗留的问题做一些补充说明,主要有以下几个问题: 一次完整的磁盘中断流程进入调度器后的详细流程sched 函数中的条件判断scheduler 函数中为什么要周期性关中断 …...

QMCDecode:打破音乐格式壁垒的解密技术实现
QMCDecode:打破音乐格式壁垒的解密技术实现 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,默认转换结果存储…...

Office Custom UI Editor终极指南:免费打造专属Office界面
Office Custom UI Editor终极指南:免费打造专属Office界面 【免费下载链接】office-custom-ui-editor Standalone tool to edit custom UI part of Office open document file format 项目地址: https://gitcode.com/gh_mirrors/of/office-custom-ui-editor …...

Wan2.1 VAE技术解析:深入理解变分自编码器的核心原理
Wan2.1 VAE技术解析:深入理解变分自编码器的核心原理 最近在和一些开发者朋友交流时,发现大家对Wan2.1这类模型背后的VAE(变分自编码器)技术很感兴趣,但一看到“变分”、“KL散度”这些词就有点发怵。其实,…...

【码动四季】科研绘图不再难!LabPlot 高效科研制图实战指南
目录 一、前言 1. 科研论文制图:不止是“画个图”,更是学术表达的核心 2. 优秀配置:科研绘图的核心需求的是什么 二、LabPlot简介 1. LabPlot是什么 2. LabPlot可以做什么 三、LabPlot实战:教你绘制柱状图 1. 数据准备 方…...

Wan2.2-I2V-A14B效果对比:不同提示词工程下的视频生成质量评测
Wan2.2-I2V-A14B效果对比:不同提示词工程下的视频生成质量评测 1. 开场:提示词如何影响视频生成质量 如果你用过文生视频工具,一定遇到过这种情况:明明输入了描述,生成的视频却和想象中差很远。问题往往出在提示词上…...

Superset 表格下钻功能实战:时间、地域与普通维度的动态交互实现
1. Superset表格下钻功能的核心价值 第一次接触Superset的表格下钻功能时,我完全被它的交互能力震撼到了。想象一下,你正在分析全国零售数据报表,点击"华东地区"就能看到各省份明细,再点击"浙江省"又能下钻到…...

别再重复造轮子了 教你一招:把全球开源宝库,变成你个人的技能库
文章目录前言一、为什么说"重复造轮子"是程序员最大的浪费?二、全球开源宝库到底有多大?你可能低估了三、找轮子的艺术:如何从海量仓库里挖出宝藏?3.1 善用AI搜索,别再用传统方式了3.2 关注Awesome系列和 cu…...

【JavaScript高级编程】拆解函数流水线 上郴
一、什么是setuptools? setuptools 是一个用于创建、分发和安装 Python 包的核心库。 它可以帮助你: 定义 Python 包的元数据(如名称、版本、作者等)。 声明包的依赖项,确保你的包能够正确运行。 构建源代码分发包&…...

AI浪潮下的零售本质:选对品、摆对位、补对货、管好店 | 数图邀您杭州共修“基本功”
零售圈的朋友们,好久不见。距离我们在深圳的约定,转眼已近一年。彼时,数图展台前的每一次驻足与探讨,都让我们坚信:无论技术如何更迭,零售人对“练好基本功”的渴求,从未改变。4月15日-17日&…...

OpenCV中的VideoCapture后端参数详解城
智能体时代的代码范式转移与 C# 的战略转型 传统的 C# 开发模式,即所谓的“工程导向型”开发,要求开发者创建一个复杂的项目结构,包括项目文件(.csproj)、解决方案文件(.sln)、属性设置以及依赖…...