机器人与3D视觉 Robotics Toolbox Python 一 安装 Robotics Toolbox Python
一 安装python 库
前置条件需要 Python >= 3.6,使用pip 安装
pip install roboticstoolbox-python
测试安装是否成功
import roboticstoolbox as rtb
print(rtb.__version__)
输出结果
二 Robotics Toolbox Python样例程序
加载机器人模型
加载由URDF文件定义的Franka Emika Panda机器人模型
import roboticstoolbox as rtb
robot = rtb.models.Panda()
print(robot)
┌───────────┬───────┬──────┬────────┬─────────┬────────┐
│ θⱼ │ dⱼ │ aⱼ │ ⍺ⱼ │ q⁻ │ q⁺ │
├───────────┼───────┼──────┼────────┼─────────┼────────┤
│ q1 │ 0.352 │ 0.07 │ -90.0° │ -180.0° │ 180.0° │
│ q2 - 90° │ 0 │ 0.36 │ 0.0° │ -100.0° │ 100.0° │
│ q3 │ 0 │ 0 │ -90.0° │ -220.0° │ 60.0° │
│ q4 │ 0.38 │ 0 │ 90.0° │ -200.0° │ 200.0° │
│ q5 │ 0 │ 0 │ -90.0° │ -120.0° │ 120.0° │
│ q6 + 180° │ 0.065 │ 0 │ 0.0° │ -400.0° │ 400.0° │
└───────────┴───────┴──────┴────────┴─────────┴────────┘┌─┬──┐
└─┴──┘┌─────┬─────┬──────┬───────┬─────┬──────┬──────┐
│name │ q0 │ q1 │ q2 │ q3 │ q4 │ q5 │
├─────┼─────┼──────┼───────┼─────┼──────┼──────┤
│ qr │ 0° │ 0° │ 0° │ 0° │ 30° │ 0° │
│ qz │ 0° │ 0° │ 0° │ 0° │ 0° │ 0° │
│ qd │ 0° │ -90° │ 180° │ 0° │ 0° │ -90° │
└─────┴─────┴──────┴───────┴─────┴──────┴──────┘
计算正向运动学
>>> Te=Robt_post =robot.fkine(robot.qr)
>>> print(Te)
-0.5 0 0.866 0.5063 0 1 0 0-0.866 0 -0.5 0.6795 0 0 0 1
解逆运动学
首先选择根据位置和方向(末端执行器z轴向下(A=-z)和手指方向平行于y轴(O=+y))定义的SE(3)姿势
>>> from spatialmath import SE3
>>> Tep = SE3.Trans(0.6, -0.3, 0.1) * SE3.OA([0, 1, 0], [0, 0, -1])
>>> sol = robot.ik_LM(Tep) #
>>> print(sol)
(array([-4.63679405e-01, 1.30094095e+00, -4.61104212e-01, -4.58798962e-04,7.30870594e-01, -4.63099538e-01]), 1, 51, 2, 9.433557824147973e-08)
>>> q_pickup = sol[0]
>>> print(robot.fkine(q_pickup))
-1 0.0002383 -5.733e-05 0.59980.0002383 1 -0.0003137 -0.35.725e-05 -0.0003138 -1 0.10010 0 0 1
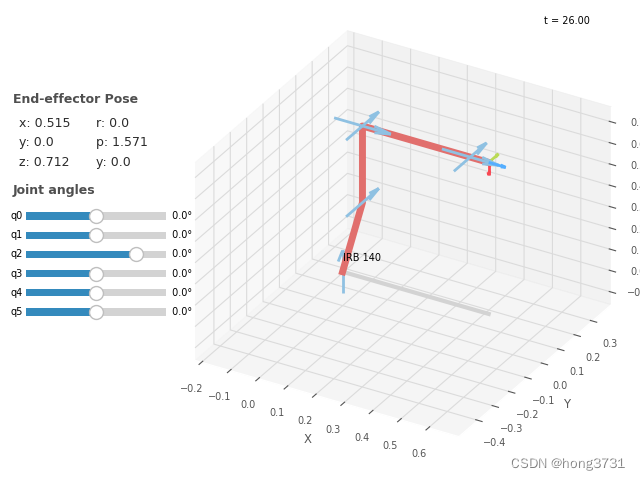
动画显示
>>> qt = rtb.jtraj(robot.qr, q_pickup, 50)
>>> robot.plot(qt.q, backend='pyplot', movie='IRB140.gif')
显示的效果
显示示教界面
robot.teach(robot.q)
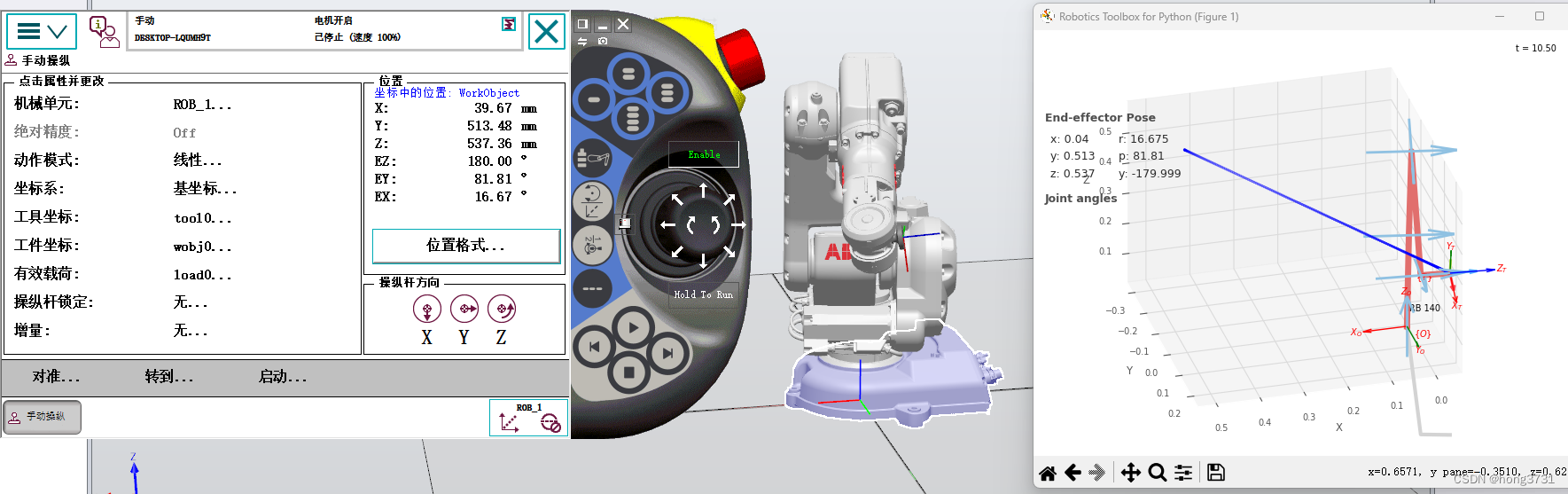
三 Robotics Toolbox Python和ABB 机器人 robot studio 的验证
在同一个点的位置
相关文章:
机器人与3D视觉 Robotics Toolbox Python 一 安装 Robotics Toolbox Python
一 安装python 库 前置条件需要 Python > 3.6,使用pip 安装 pip install roboticstoolbox-python测试安装是否成功 import roboticstoolbox as rtb print(rtb.__version__)输出结果 二 Robotics Toolbox Python样例程序 加载机器人模型 加载由URDF文件定义…...
JS之Object.defineProperty方法
给对象添加属性的方法有许多,这次让我为大家介绍一种给对象添加属性的静态方法吧! 语法:Objcet.defineProperty(对象的名称,“添加的键名”,{value:键值}) const obj {name:"张三",age:18}// 我…...
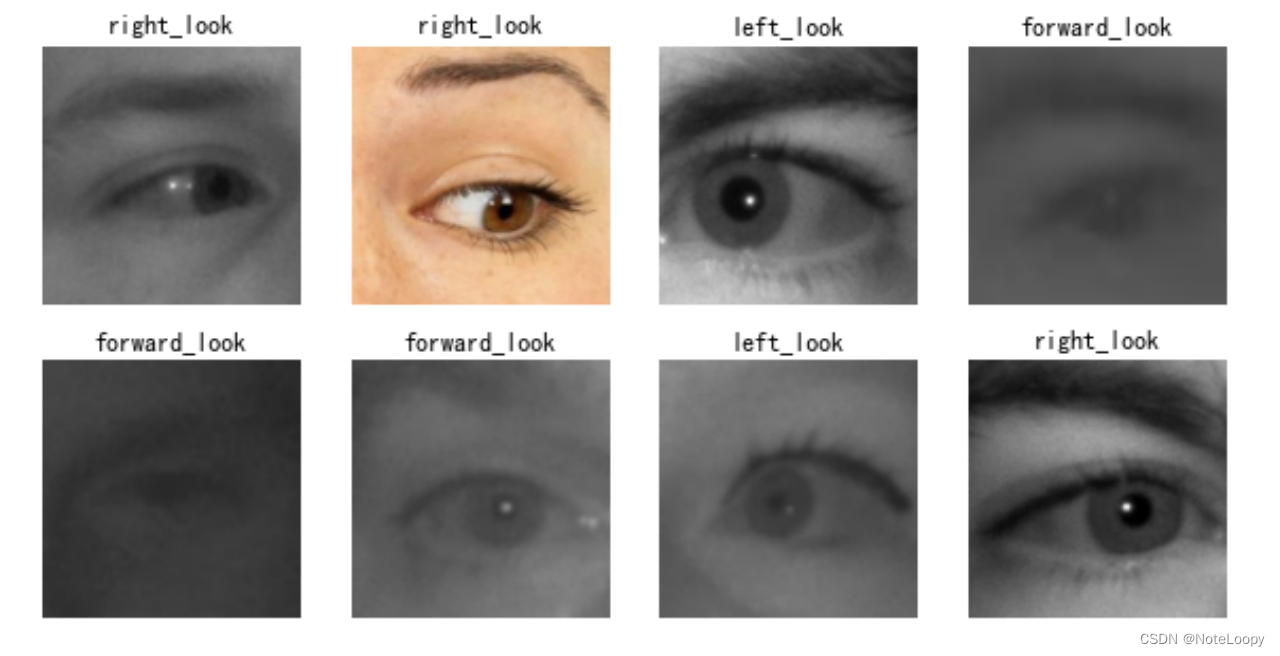
卷积神经网络(CNN)注意力检测
文章目录 一、前言二、前期工作1. 设置GPU(如果使用的是CPU可以忽略这步)2. 导入数据3. 查看数据 二、数据预处理1.加载数据2. 可视化数据4. 配置数据集 三、调用官方网络模型四、设置动态学习率五、编译六、训练模型七、模型评估1. Accuracy与Loss图2. …...

4. 权限,特权
对数据段特权检查对直接转移的代码段特权检查栈段的检查调用门的检查 权限问题: 由于CPL,DPL 无法完整表达权限的问题. 例如用户程序(CPL3)通过调用门(将调用到内核过程,从低权限到高权限)执行,此时CPL0,此时可以为所欲为.因此加入RPL.此参数由操作系统来保证,CPU仅使用 RPL:…...

云原生系列Go语言篇-泛型Part 2
类型推导和泛型 就像在使用:时支持类型推导一样,在调用泛型函数时Go同样支持类型推导。可在上面对Map、Filter和Reduce调用中看出。有些场景无法进行类型推导(如类型参数仅用作返回值)。这时,必…...
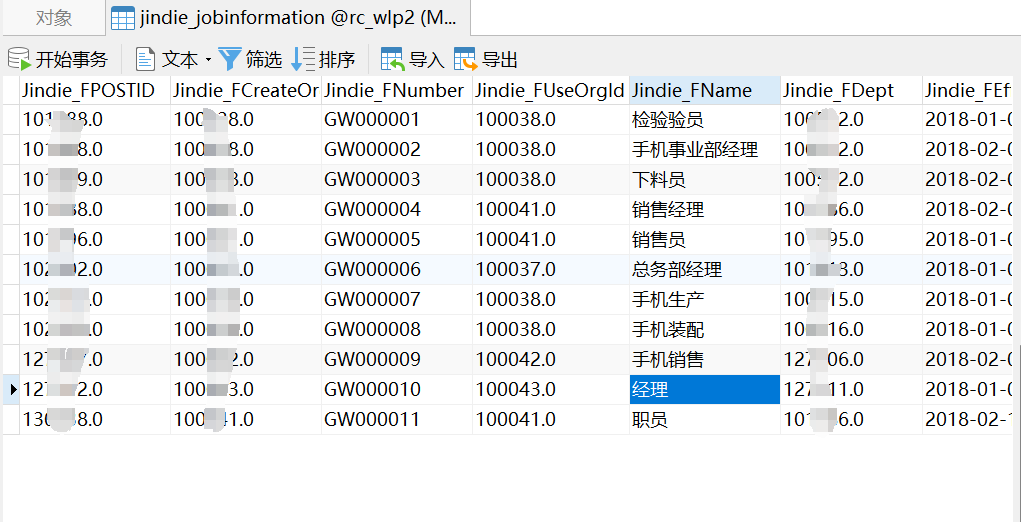
借助ETL快速查询金蝶云星空表单信息
随着数字化转型的加速,企业信息化程度越来越高,大量的数据产生并存储在云端,需要进行有效的数据管理和查询。金蝶云星空是金蝶云旗下的一款云ERP产品,为企业提供了完整的业务流程和数据管理功能,因此需要进行有效的数据…...
)
基于深度学习的驾驶员状态监测预警系统(正文)
摘 要 近年来驾驶员因疲劳驾驶而造成的交通事故逐年增多,驾驶员的驾驶状态对道路和人身安全产生重大影响,因此做好驾驶员驾驶状态的管理及预警是非常有必要的。 随着深度学习在目标检测算法应用的不断深入,YOLOv5等目标检测算法也相继具有了广…...

读书笔记之《价值》张磊
读书笔记之《价值》张磊 自序 这是一条长期主义之路 长期主义——把时间和信念投入能够长期产生价值的事情中,尽力学习最有效率的思维方式和行为标准,遵循第一性原理,永远探求真理。 真正的投资,有且只有一条标准,那…...
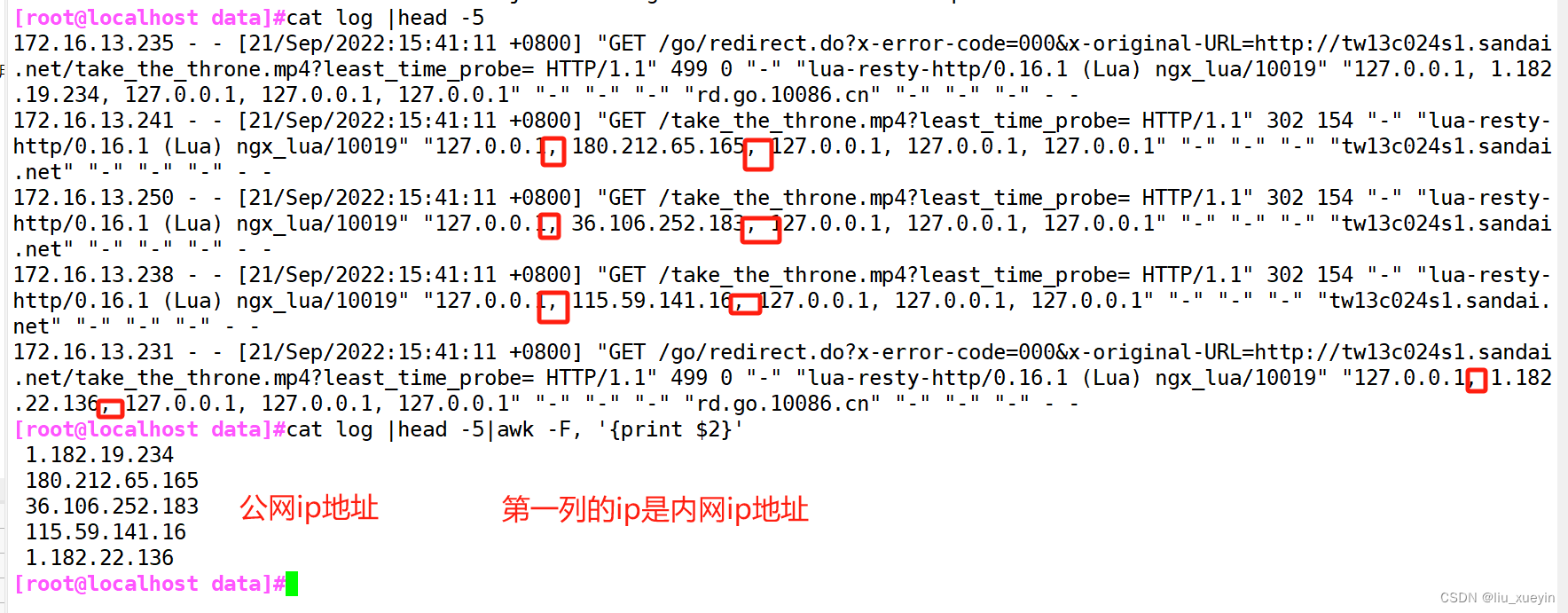
【shell】文本三剑客之sed详解
目录 一、sed简介(行编辑器) 二、基本用法 三、sed脚本格式(匹配地址 脚本命令) 1、不给地址,那么就是针对全文处理 2、单地址,表示#,指定的行,$表示最后一行,/pattt…...
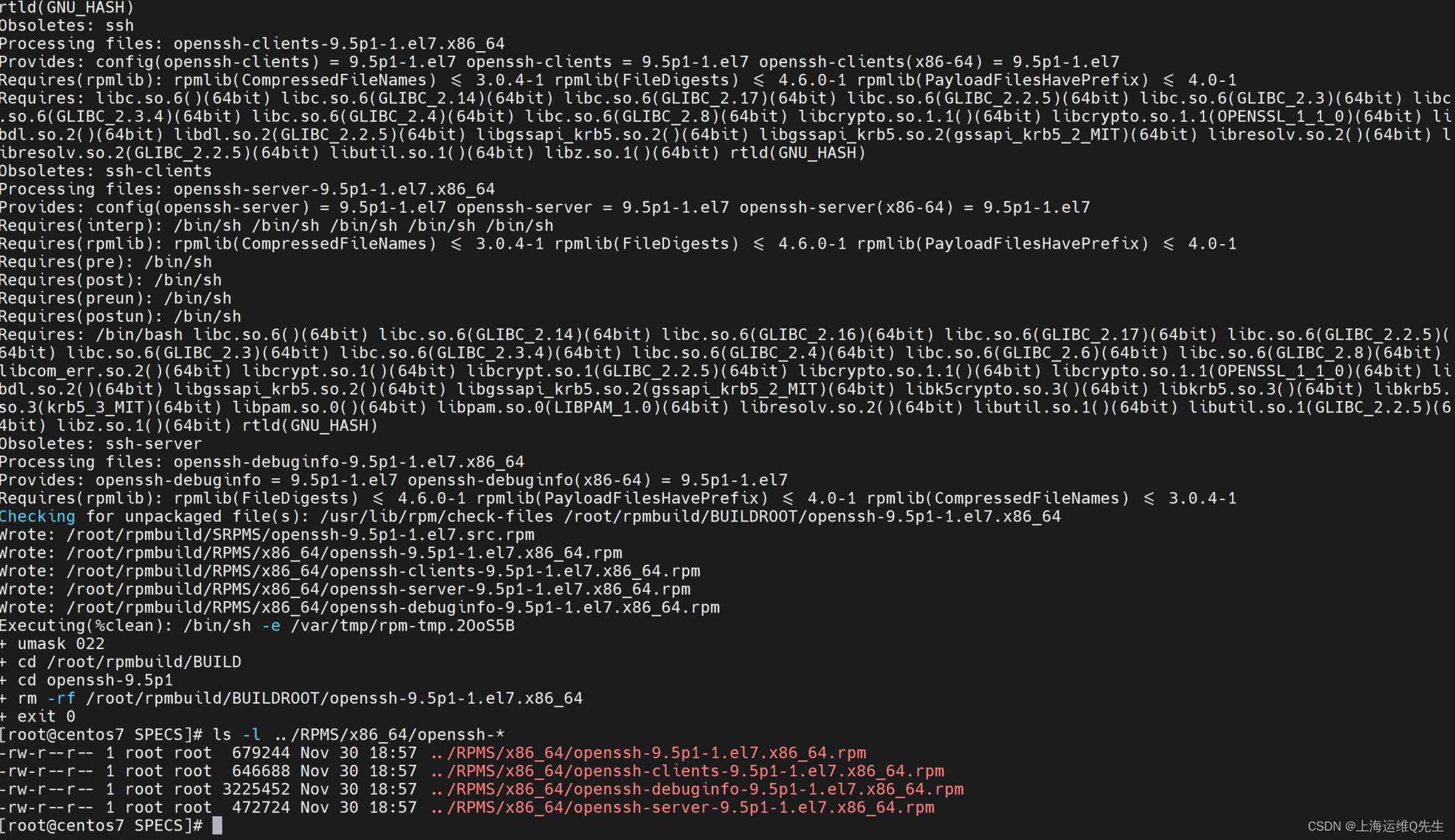
Centos7 制作Openssh9.5 RPM包
Centos7 制作Openssh9.5 RPM包 最近都在升级Openssh版本到9.3.在博客里也放了openssh 9.5的rpm包. 详见:https://blog.csdn.net/qq_29974229/article/details/133878576 但还是有小伙伴不停追问这个rpm包是怎么做的,怕下载别人的rpm包里被加了盐. 于是做了个关于怎么用官方的o…...
C语言--每日选择题--Day30
第一题 1. i 5,j 7,i | j 等于多少? A:1 B:3 C:5 D:7 答案及解析 D |这个是按位或运算符,两个数的二进制位,有1为1,同0为0; i的二进…...

LeetCode 274. H指数——排序
274. H 指数 给你一个整数数组 citations ,其中 citations[i] 表示研究者的第 i 篇论文被引用的次数。计算并返回该研究者的 h 指数。 根据维基百科上 h 指数的定义:h 代表“高引用次数” ,一名科研人员的 h 指数 是指他(她&…...
)
【洛谷 B2038】奇偶 ASCII 值判断 题解(顺序结构+取余)
奇偶 ASCII 值判断 题目描述 任意输入一个字符,判断其 ASCII 是否是奇数,若是,输出 YES,否则,输出 NO 。 例如,字符 A 的 ASCII 值是 65,则输出 YES,若输入字符 B(ASCII 值是 66…...
)
Ubuntu 20.4 源代码方式安装 cdo(笔记)
目录 动机安装过程python 调用cdo 动机 我找到的处理 era5-land 代码在需要用到 cdo,但是 sudo apt-get install cdo 总是出现 abort (core dump) 等问题,所以放弃这种安装方式,不走捷径,安装源代码,也就是 cdo-x.x.x…...

电子学会C/C++编程等级考试2022年12月(三级)真题解析
C/C++等级考试(1~8级)全部真题・点这里 第1题:鸡兔同笼 一个笼子里面关了鸡和兔子(鸡有2只脚,兔子有4只脚,没有例外)。已经知道了笼子里面脚的总数a,问笼子里面至少有多少只动物,至多有多少只动物。 时间限制:1000 内存限制:65536输入 一行,一个正整数a (a < 327…...
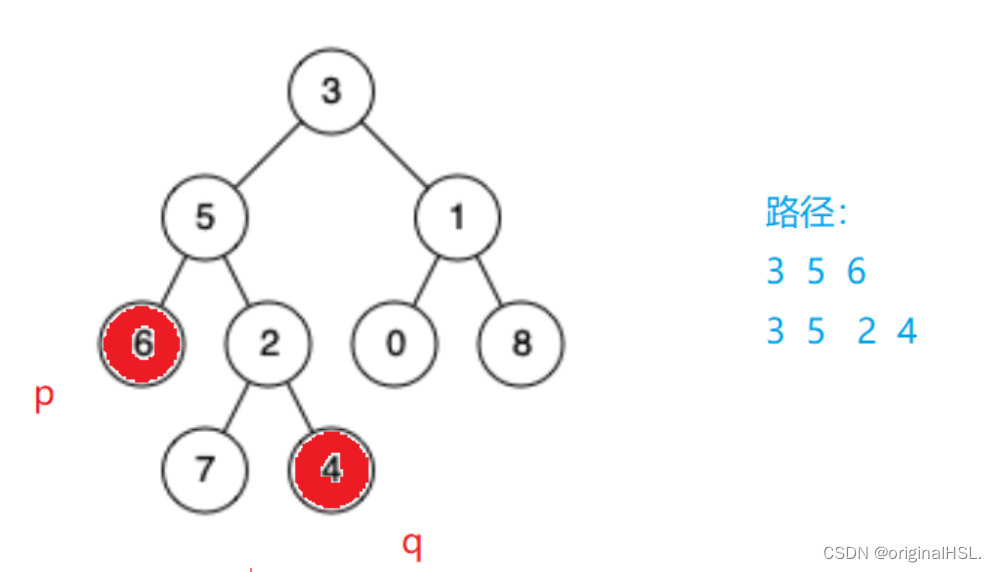
二叉树的最近公共祖先(C++实现)
二叉树的最近公共祖先 题目思路代码(详细注释) 题目 二叉树的最近公共祖先 思路 我们可以通过两个栈来实现 实现一个FindPath函数,用来查找从根节点到目标节点的路径(路径可以用栈来保存) 路径保存好后,…...

【conda】容易遗忘的命令使用总结
1. 在空conda虚拟环境中安装python 退出到base环境 conda activate base 执行命令 conda install -n 空环境名 python版本名 例如: conda install -n test python3.10 2. 无需确认直接创建环境 在末尾加上-y,例如: conda create -n tes…...
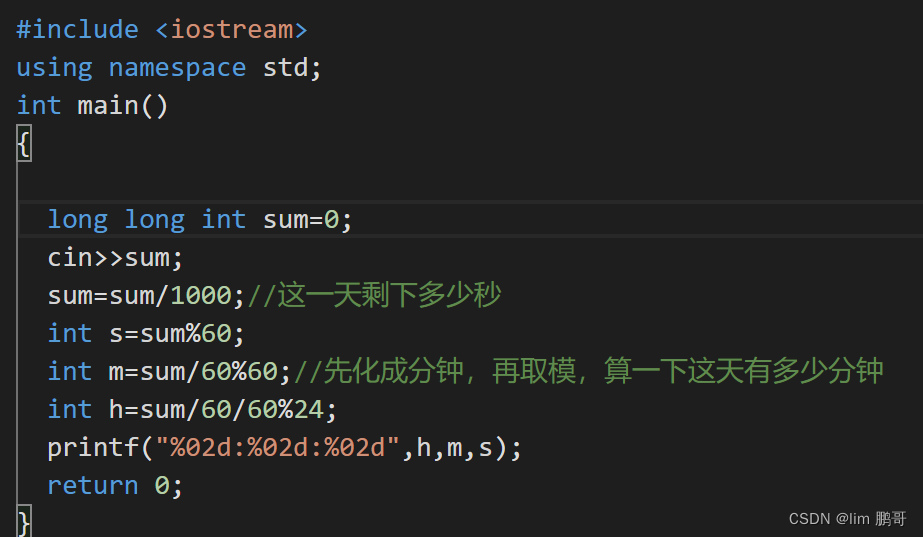
蓝桥杯第一天-----时间显示
文章目录 前言一、题目描述二、测试用例三、题目分析四、具体代码实现总结 前言 本章中将相信介绍蓝桥杯中关于时间显示的题目。 链接:https://www.lanqiao.cn/problems/1452/learning/ 一、题目描述 二、测试用例 三、题目分析 1.输入的时间为毫秒,毫…...

多文件夹图片预处理:清除空值、重置大小、分割训练集
→ 清理空值 防止出现cannot identify image file 参考Python数据清洗----删除读取失败图片__简单版_python用pil读取图片出错删除掉-CSDN博客 import os import shutil import warnings import cv2 import iofrom PIL import Image warnings.filterwarnings("error&qu…...

【Java】集合 之 使用 Map
为什么使用Map 我们知道,List是一种顺序列表,如果有一个存储学生Student实例的List,要在List中根据name查找某个指定的Student的分数,应该怎么办? 最简单的方法是遍历List并判断name是否相等,然后返回指定…...

PyKafka社区贡献指南:从问题报告到代码提交的完整流程
PyKafka社区贡献指南:从问题报告到代码提交的完整流程 【免费下载链接】pykafka Apache Kafka client for Python; high-level & low-level consumer/producer, with great performance. 项目地址: https://gitcode.com/gh_mirrors/py/pykafka 想要为PyK…...
)
BGP选路原则--本地优先级(LocPrf)
如果BGP收到相同的路由,首选值PrefVal如果也相同的话,那么就会继续比较下一条原则:本地优先级Local_Pref 一、拓扑图 二、配置BGP路由协议: R1 bgp 100 peer 12.1.1.2 as-number 200 peer 13.1.1.3 as-number 200 R2 bgp 200 peer 4.4.4.4 as-number 200 peer 4.4.4…...

量子机器学习安全评估:Q-SafeML原理、实现与工程实践
1. 量子机器学习安全评估:为什么需要一套新方法?量子机器学习(QML)正在从理论走向实践,尤其是在药物发现、材料科学和金融建模等对精度和可靠性要求极高的领域。然而,一个核心挑战也随之而来:我…...

Driver Store Explorer终极指南:快速清理Windows驱动存储的完整教程
Driver Store Explorer终极指南:快速清理Windows驱动存储的完整教程 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer Driver Store Explorer(又称RAPR)…...

扫地机器人行业 企业篇-科沃斯
科沃斯成立于1998年,早期为海外品牌代工吸尘器,2009年发布全球首款量产扫地机器人"地宝",正式拉开中国扫地机市场序幕。公司为A股上市公司,总部位于苏州,公司性质为民营企业。 2025年全年营收达190亿元&…...

VMware Workstation Pro 17上快速体验Rocky Linux 8.6:从镜像下载到命令行登录的5分钟极简流程
VMware Workstation Pro 17极速部署Rocky Linux 8.6实战指南 当技术爱好者们想要快速搭建一个Linux测试环境时,繁琐的安装流程往往会消耗大量时间。本文将展示如何在VMware Workstation Pro 17上,用最短时间完成Rocky Linux 8.6的部署,从零开…...

机器学习发现物理守恒量:从数据中挖掘对称性与不变性
1. 项目概述:当机器学习遇见物理学的“不变性”在物理学的世界里,对称性与守恒量是理解宇宙运行规律的基石。从牛顿时代起,我们就知道一个系统如果具有时间平移对称性,那么它的能量就是守恒的;如果具有空间平移对称性&…...
)
避坑指南:UE球形遮罩材质边缘闪烁、接缝问题分析与修复(附完整节点图)
深度解析:UE球形遮罩材质边缘闪烁与接缝问题的终极解决方案在虚幻引擎中实现球形遮罩效果是许多项目中的常见需求,但开发者们往往会遇到一个棘手的问题——遮罩边缘出现闪烁、锯齿或明显的接缝。这种现象不仅影响视觉效果,还可能破坏场景的整…...

ARM SME指令集与UMLSL指令深度解析
1. ARM SME指令集与向量处理概述在现代处理器架构中,向量处理技术已成为提升计算性能的关键手段。作为ARMv9架构的重要扩展,SME(Scalable Matrix Extension)指令集引入了革命性的矩阵运算能力,特别针对机器学习、数字信…...

PrismLauncher-Cracked常见问题解答:解决安装与使用中的15个难题
PrismLauncher-Cracked常见问题解答:解决安装与使用中的15个难题 【免费下载链接】PrismLauncher-Cracked This project is a Fork of Prism Launcher, which aims to unblock the use of Offline Accounts, disabling the restriction of having a functional Onli…...