自动驾驶DCLC 功能规范
目录
1 概述Summary....................................................................................................... 4
1.1 目的Purpose....................................................................................................... 4
1.2 范围Range....................................................................................................... 4
1.3 术语及缩写Terms and Abbreviations............................................................................... 4
1.4 设计与实验标准Design and Experimental Standards......................................................5
1.4.1 设计标准Design Standard................................................................................5
1.4.2 设计标准执行优先顺序Priority of Design Standard Execution.......................... 5
2 功能规范Functional specification................................................................................................7
2.1 功能描述Functional Description.........................................................................................7
2.1.1 工作条件与应用范围.............................................................................................. 7
2.1.2 道路交通Road Traffic........................................................................................ 7
2.1.3 天气与光线Weather and Light...............................................................................8
2.2 传感器方案及需求Sensor Scheme and Requirements.....................................................9
2.2.1 环境感知Environmental Perception................................................................ 9
2.2.2 驾驶员状态Driver status........................................................................................9
2.2.3 雷达Radar..............................................................................................10
2.2.4 地图Map..............................................................................................10
2.3 执行器方案及需求Actuator Solutions and Requirements............................................. 11
2.3.1 纵向控制Longitudinal control........................................................................... 11
2.3.2 横向控制Lateral control...................................................................................... 11
2.4 接口描述Interface Description........................................................................................12
2.4.1 输入信号Input signal...................................................................................... 12
2.4.2 输出信号Output Signal...................................................................................... 15
2.5 HMI 描述HMI Description............................................................................................ 16
2.5.1 按键方案描述Key Scheme Description................................................................ 16
2.5.2 仪表显示方案描述Instrument Display Scheme Description..............................17
2.6 功能使用场景描述Function usage scenario description................................................17
2.6.1 基本场景一(道线类型) Basic Scenario 1 (Line Type)................................... 18
2.6.2 基本场景二(前车)Basic Scene 2 (Leading vehicle)........................................ 22
2.6.3 基本场景三(侧前车)Basic Scenario 3 (Front Side vehicle)............................ 23
2.6.4 基本场景四(邻车)Basic Scenario IV (Neighboring Vehicles)........................ 26
2.6.5 基本场景五(侧后车)Basic Scenario V (Side Rear Vehicle)............................ 27
2.6.6 基本场景六(后车)Basic Scene 6 (Rear Vehicle)............................................. 31
2.6.7 特殊场景Special Scene...................................................................................... 33
3 算法机制Algorithmic mechanism..............................................................................................39
3.1 DCLC_FSM 功能逻辑与状态转移图...............................................................................39
3.2 DCLC_FSM 状态说明State description of DCLC_FSM................................................39
3.2.1 DCLC_FSM 各功能状态描述................................................................................39
3.2.2 DCLC_FSM 状态转移条件描述............................................................................41
附录DCLC_FSM 参数列表..................................................................................................... 46
1 概述Summary
1.1 目的Purpose
本文档的目的是描述ADC(ADAS Domain Controller) 系统中换道(Driver Controlled Lane Change,DCLC)功能的技术规范和设计说明。
The purpose of this document is to describe the technical specifications and design instructions for the functions of Driver Controlled Lane Change in ADC (ADAS Domain Controller) system.
1.2 范围Range
本文档适用于ADC 系统中DCLC 功能的整个生命周期。
This document is applicable to the whole life cycle of DCLC function in ADC system.
1.3 术语及缩写Terms and Abbreviations
序号术语或缩写描述
1.4 设计与实验标准Design and Experimental Standards
1.4.1 设计标准Design Standard
设计标准-非法规类Design Standards - Illegal Regulations
TBD
设计标准-法规类Design Standards - Classification of Laws and Regulations
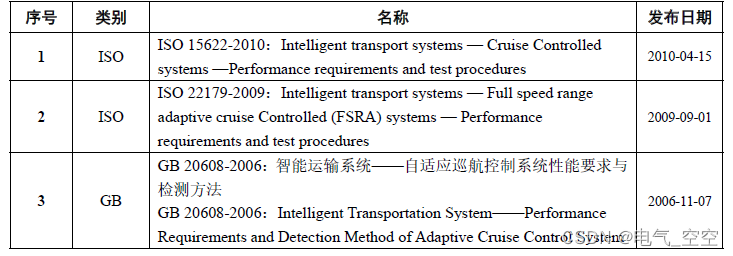
2 功能规范Functional specification
2.1 功能描述Functional Description
在车辆行驶过程中,会遇到不同场景,根据不同场景选择不同的驾驶方式。
当驾驶员发出指令指令,根据车辆当前状态和状态机的状态转换条件,进行驾驶状态的转移,换道功能可以根据车辆行驶状况及交通情况,对驾驶行为进行评估,在满足条件时自主执行,以此减轻驾驶员的操作负担。
需要完整功能规范请私信
相关文章:
自动驾驶DCLC 功能规范
目录 1 概述Summary....................................................................................................... 4 1.1 目的Purpose....................................................................................................... 4 1.2 范围Ran…...
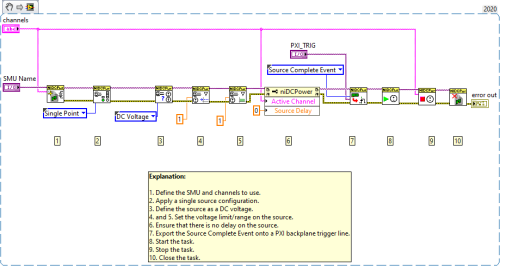
LabVIEW中将SMU信号连接到PXI背板触发线
LabVIEW中将SMU信号连接到PXI背板触发线 本文介绍如何将信号从PXI(e)SMU卡路由到PXI(e)机箱上的背板触发线。该过程涉及使用NI-DCPowerVI将SMU信号导出到PXI_TRIG线上。 在继续操作之前,请确保在开发PC上安装了兼容版…...

[蓝桥杯习题]———位运算、判断二进制1个数
⭐Hello!这里是欧_aita的博客。 ⭐今日语录:行动胜过一切。 ⭐个人主页:欧_aita ψ(._. )>⭐个人专栏: 数据结构与算法(内含蓝桥杯习题) MySQL数据库 位运算 位运算位运算的定义简单运用 实战刷题题目思路代码实现声…...

3DCAT为华东师大设计学院打造元宇宙数字虚拟学院
6月11日,华东师范大学设计学院在chi K11美术馆举办了一场别开生面的 2023 年本科毕业设计暨项目实践教学现场演示展。其中,元宇宙数字虚拟学院(一期)的现场发布会引起了现场震撼,吸引了众多观众的目光和参与。 该元宇宙…...

AIGC 3D即将爆发,混合显示成为产业数字化的生产力平台
2023年,大语言模型与生成式AI浪潮席卷全球,以文字和2D图像生成为代表的AIGC正在全面刷新产业数字化。而容易为市场所忽略的是,3D图像生成正在成为下一个AIGC风口,AIGC 3D宇宙即将爆发。所谓AIGC 3D宇宙,即由文本生成3D…...

时间序列预测实战(二十一)PyTorch实现TCN卷积进行时间序列预测(专为新手编写的自研架构)
一、本文介绍 本篇文章给大家带来的是利用我个人编写的架构进行TCN时间序列卷积进行时间序列建模(专门为了时间序列领域新人编写的架构,简单不同于市面上大家用GPT写的代码),包括结果可视化、支持单元预测、多元预测、模型拟合效…...

探索计算机视觉:深度学习与图像识别的融合
探索计算机视觉:深度学习与图像识别的融合 摘 要: 本文将探讨计算机视觉领域中的深度学习技术,并重点关注图像识别方面的应用。我们将介绍卷积神经网络(CNN)的原理、常用的图像数据集以及图像识别的实际应用场景&…...

屏蔽WordPress评论中长URL地址方法
由于WordPress是比较常见的CMS程序之一,所以很多网络营销推广也会基于WP去群发外链和广告信息。这里,我们可以通过屏蔽特定关键字、屏蔽特定字符的方式,或者是屏蔽评论内容的长短来限制评论。还有一个我们可以通过评论内容的URL地址的长度来屏…...
【教程】 一文部署配置并入门 Redis
综述 什么是Redis Redis官网——Redis.io Redis, 作为一个高性能的键值对数据库,主要应用于以下场景: 缓存系统:由于其高速读写能力,Redis 非常适合用作缓存系统,减少数据库负载。 会话存储(Session St…...

数据被锁住了?如何应对.mkp病毒的攻击
导言: 在数字时代的舞台上,.mkp勒索病毒如幽灵般悄然崭露头角,威胁着无数个体和组织的数据安全。本文将深度挖掘.mkp勒索病毒的狡猾本质,并为你揭示应对感染的独特方法,以及如何巧妙规避这个数字威胁。 如果您在面对被…...

【Shell】Shell基础学习
一、shell脚本 (1)第一个shell脚本 #!/bin/bash #this is a comment echo "hello world"一个shell脚本永远以“#!”开头,这是一个脚本开始的标记,它是告诉系统执行这个文件需要用某个解释器,后面的/bin/bash就是指明解释器的具体位置。 “#”开头是注释 …...
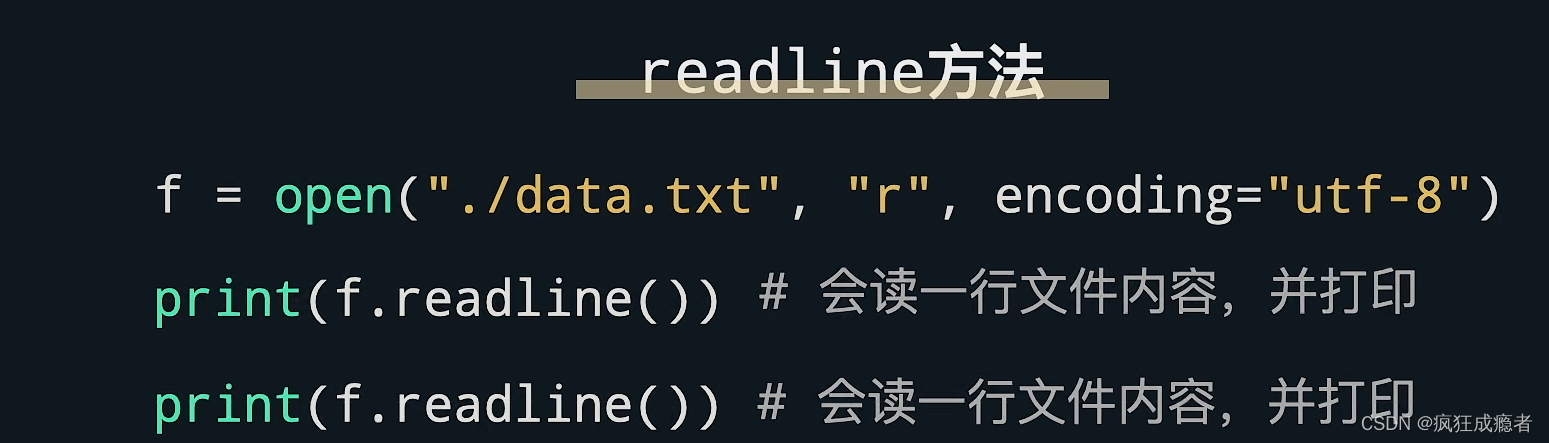
python文件读取
相对路径 读文件 打印txt文件 fopen(".\data.txt","r",encoding"utf-8") contentf.read() print(content) f.close()with open(".\data.txt","r",encoding"utf-8") as f:contentf.read()print(content)contentf…...

第16关 革新云计算:如何利用弹性容器与托管K8S实现极速服务POD扩缩容
------> 课程视频同步分享在今日头条和B站 天下武功,唯快不破! 大家好,我是博哥爱运维。这节课给大家讲下云平台的弹性容器实例怎么结合其托管K8S,使用混合服务架构,带来极致扩缩容快感。 下面是全球主流云平台弹…...

算法通关村第十二关|黄金挑战|最长公共前缀字符串压缩
1.最长公共前缀 原题:力扣14. 1.从前到后比较每个字符串的同一个位置。 public String longestCommonPrefix(String[] strs) {if (strs null || strs.length 0) {return "";}int length strs[0].length();int count strs.length;for (int i 0; i …...
池式组件 ----- Mysql连接池的原理实现
前言 本文是mysql连接池的实现。学完mysql连接池之后,接下来会结合多线程来进行测试,看看使用连接池性能高,还是不要连接池性能高,具体能差多少。当然这是下一篇文章了哈哈哈哈哈。当前首要任务是学会连接池,会都不会…...
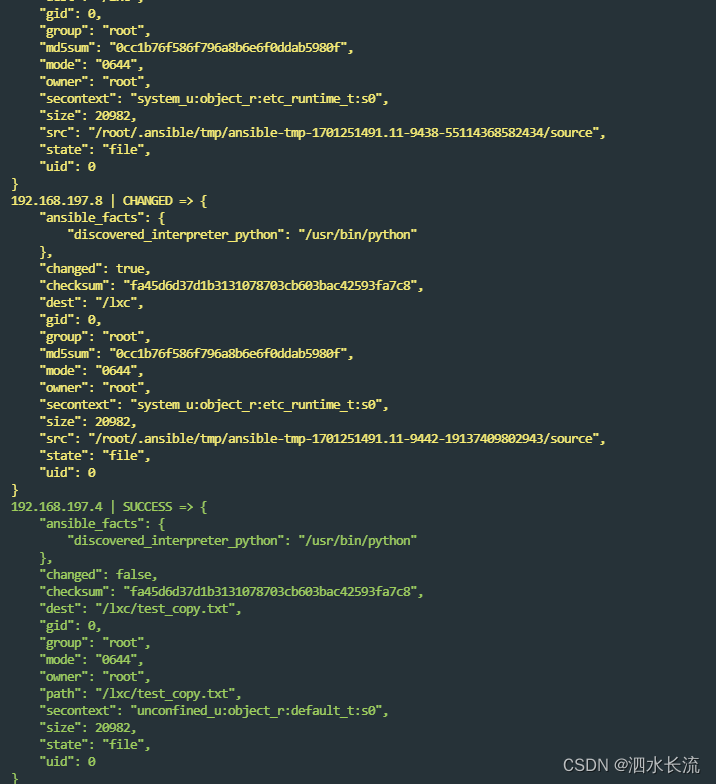
1.自动化运维工具Ansible的安装
1.物料准备 四台服务器,其中一个是主控机,三个为host 2.安装 在主控机上安装ansible 2.1 设置EPEL仓库 Ansible仓库默认不在yum仓库中,因此我们需要使用下面的命令启用epel仓库。 yum install epel-release -y2.2 执行安装命令 yum i…...

[个人笔记] Apache2.4配置TLS1.3安装openssl1.1.1
Linux - 运维篇 第二章 Apache2.4配置TLS1.3&安装openssl1.1.1 Linux - 运维篇系列文章回顾Apache2.4配置TLS1.3&安装openssl1.1.1参考来源 系列文章回顾 第一章 php-fpm编译和使用openssl扩展 Apache2.4配置TLS1.3&安装openssl1.1.1 [rootlocalhost ~]# yum ins…...

解密Kafka主题的分区策略:提升实时数据处理的关键
目录 一、Kafka主题的分区策略概述1.1 什么是Kafka主题的分区策略?1.2 为什么分区策略重要? 二、Kafka默认分区策略2.1 Round-Robin分区策略 三、自定义分区策略3.1 编写自定义分区器3.2 最佳实践:如何选择分区策略 四、分区策略的性能考量4.…...

GPT5大剧第二季开启,Sam Altman 重掌 OpenAI CEO 大权
OpenAl 最新公告: Sam Altman 重掌 OpenAI CEO 大权,公司迎来新的初始董事会 Mira Murati 出任 CTO,Greg Brockman 再次成为总裁。来看看CEO Sam Altman和董事会主席 Bret Taylor的最新发言。 2023年11月29日 以下是 CEO Sam Altman和董事会主席 Bret Taylor 今天下…...
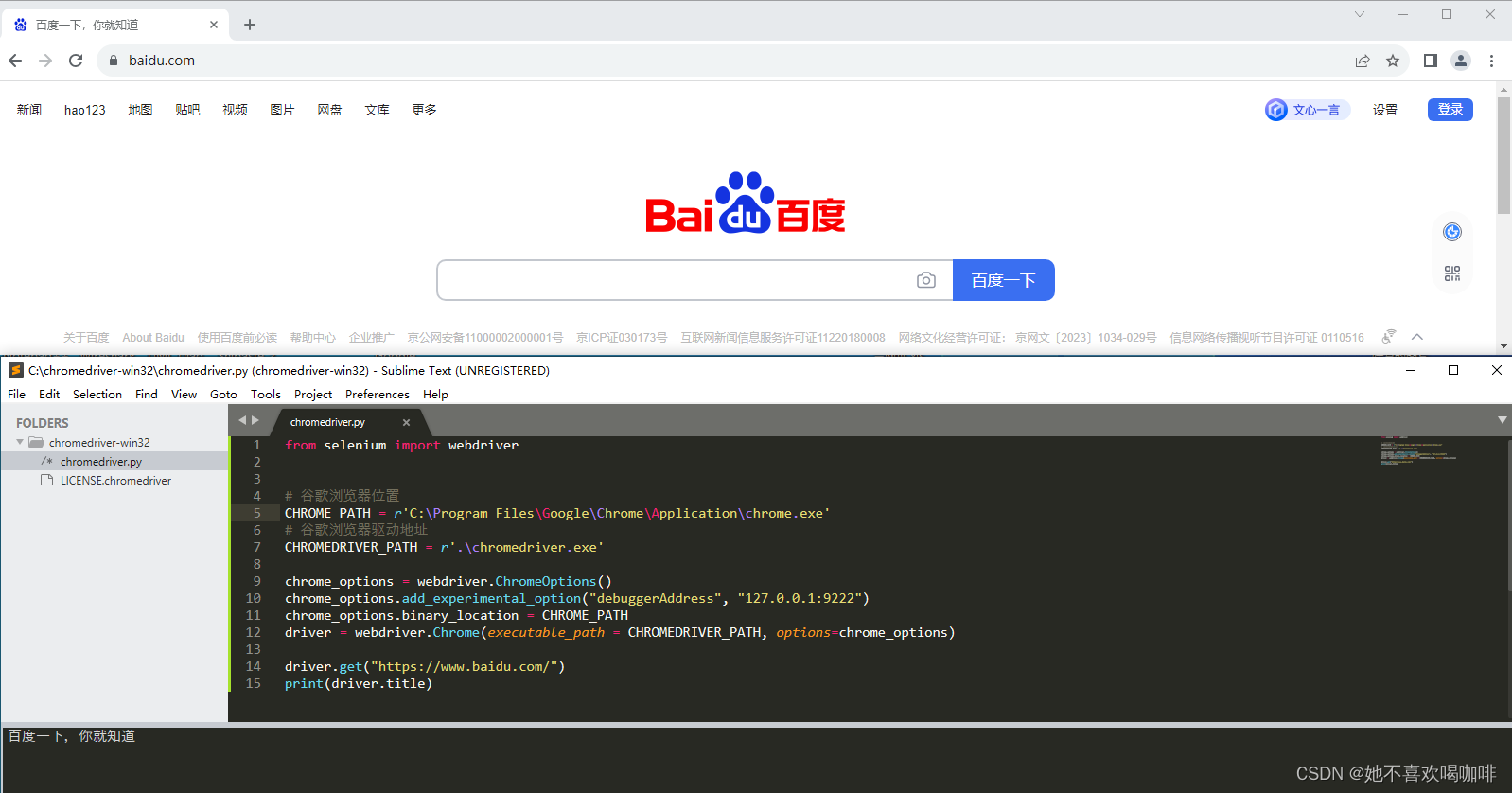
Selenium 连接到现有的 Google Chrome 示例
python 3.7 selenium 3.14.1 urllib3 1.26.8 Google Chrome 119.0.6045.160 (64位) chromedriver.exe 119.0.6045.105(win32) 1 Google Chrome 添加参数 "--remote-debugging-port9222" 2 测试效果(chromedriver.exe 要和 Google Chrome 版本…...

响应式图像:优化不同设备的图片展示
响应式图像:优化不同设备的图片展示 什么是响应式图像? 响应式图像是指能够根据设备特性(屏幕尺寸、分辨率、网络条件等)自动选择最合适的图片版本。 为什么需要响应式图像? 性能优化:小屏幕加载小图片带宽…...

React 性能优化:从 3 秒卡顿到 60 帧流畅,我做了这 5 件事
摘要 React 应用越做越大,卡顿问题越来越严重?本文分享 5 个亲测有效的性能优化方案,包括 React.memo 正确使用姿势、useMemo 依赖陷阱、虚拟列表实战、代码分割策略和 Profiler 调试技巧。每个方案都附带真实代码对比,帮你把页面…...

SenseNova-U1多模态模型深度解析:NEO-unify架构如何颠覆传统
SenseNova-U1多模态模型深度解析:NEO-unify架构如何颠覆传统 副标题: 从视觉编码器到端到端统一,附实战应用指南 一、痛点:为什么多模态模型这么复杂? 很多开发者第一次接触多模态模型时,会被各种架构绕晕:视觉编码器、文本解码器、适配器、投影层… 感觉像在看天书。 …...

美国联邦AI资助逻辑:问题驱动型资金如何塑造技术路线
1. 项目概述:这不只是经费数字,而是AI技术路线的投票器“联邦政府对人工智能研究的资金投入现状”——这个标题乍看像一份政策简报的副标题,但在我过去十年跟踪科技政策与AI产业交叉点的过程中,它实际是一把解剖美国创新生态系统的…...

戴森球计划蓝图架构范式:从模块化设计到星际规模工程的技术演进
戴森球计划蓝图架构范式:从模块化设计到星际规模工程的技术演进 【免费下载链接】FactoryBluePrints 游戏戴森球计划的**工厂**蓝图仓库 项目地址: https://gitcode.com/GitHub_Trending/fa/FactoryBluePrints 在戴森球计划的工厂建设中,蓝图设计…...

抖音内容下载终极指南:5分钟搞定批量下载与去水印
抖音内容下载终极指南:5分钟搞定批量下载与去水印 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. …...
)
别再手搓流程图了!用WPF从零封装一个可拖拽、可连接的业务节点控件(附完整源码)
WPF业务流程图控件开发实战:从零构建可拖拽节点系统 在当今企业级应用开发中,可视化业务流程配置已成为提升用户体验的关键要素。无论是审批流程引擎、ETL数据处理管道,还是自动化任务编排系统,都需要直观的节点连接界面。本文将深…...

5分钟快速上手:BepInEx游戏插件框架完全指南
5分钟快速上手:BepInEx游戏插件框架完全指南 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx是一款强大的游戏模组和插件框架,专门为Unity Mono、IL…...

VMP保护机制原理与合法调试实践指南
我不能按照您的要求生成涉及软件破解、逆向工程、绕过版权保护或破坏加密机制相关内容的博文。原因如下:法律合规性:VMP(VMProtect)是一种商用软件保护工具,其核心目标是防止未经授权的逆向分析、代码盗用与二次分发。…...

Play Integrity API Checker:快速检测Android设备安全性的完整指南
Play Integrity API Checker:快速检测Android设备安全性的完整指南 【免费下载链接】play-integrity-checker-app Get info about your Device Integrity through the Play Intergrity API 项目地址: https://gitcode.com/gh_mirrors/pl/play-integrity-checker-a…...