【C++学习手札】基于红黑树封装模拟实现map和set
🎬慕斯主页:修仙—别有洞天
💜本文前置知识: 红黑树
♈️今日夜电波:漂流—菅原纱由理
2:55━━━━━━️💟──────── 4:29
🔄 ◀️ ⏸ ▶️ ☰
💗关注👍点赞🙌收藏您的每一次鼓励都是对我莫大的支持😍
目录
一、前言
map和set的底层原理
二、红黑树的封装
通过模板使得map和set都可复用红黑树
迭代器类
operator++()
operator--()
红黑树类
仿函数
map
set
封装后的红黑树
begin()和end()
通过仿函数来控制要比较的值
完整封装
三、map和set的封装
封装后的set
封装后的map
四、完整代码
RBTree.h
myset.h
mymap.h
一、前言
本文主要叙述基于红黑树对于map和set的封装实现,需要有红黑树的知识前提。由于前面作者对于红黑树主要只是模拟实现了插入的功能。因此本文也只是实现map和set相应的功能,本文的主要要点在于map和set的封装以及迭代器中++和--的实现。
map和set的底层原理
C++中的map和set都是STL中的关联容器,都基于红黑树实现。其中set是K模型的容器,而map是KV模型的容器,本文主要讲述用一棵KV模型的红黑树同时实现map和set。map和set都使用红黑树的基本操作,时间复杂度为O(log n),其中n为元素数量。因此,map和set都是高效的关联容器。
二、红黑树的封装
通过模板使得map和set都可复用红黑树
可以看到我们定义了一个模板参数T,通过T的类型变化来改变红黑树中每一个节点的值,从而控制整颗红黑树的复用。
enum Colour
{RED,BLACK
};template<class T>
struct RBTreeNode
{RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;T _data;Colour _col;RBTreeNode(const T& data):_left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _col(RED){}
};迭代器类
迭代器实际上是对于指针进行操作,因此我们实例化并且重新命名了节点类的指针Node,由于迭代器分为是否常量迭代器,对此我们额外定义了两个模板参数Ref、Ptr用于控制其中重载运算符 T& operator*() 和 T* operator->()。当我们实例化时,区分Ref是const T&还是T&、Ptr是const T*还是T*。后面RBTree中会有所体现。在迭代器中,其中,operator*和operator->返回指向节点的指针,operator++和operator--实现前后缀++/--运算符,operator==和operator!=用来比较两个迭代器是否指向同一个节点。
以下为大致实现的功能:
template<class T, class Ref, class Ptr>
struct __TreeIterator
{typedef RBTreeNode<T> Node;typedef __TreeIterator<T, Ref, Ptr> Self;Node* _node;__TreeIterator(Node* node):_node(node){}Self& operator--();Self& operator++();Ref operator*(){return _node->_data;}Ptr operator->(){return &_node->_data;}bool operator!=(const Self& s){return _node != s._node;}bool operator==(const Self& s){return _node == s._node;}};operator++()
对于map和set的遍历我们默认都是中序遍历,也就是左子树 根 右子树。因此对于++操作我们首要的是找到下一个节点,则这个下一个节点便是在这个节点的右子树,也就是而下一个节点的准确位置为:这个节点的右子树的最左节点(为什么呢?因为左 根 右我们将这个节点看作为根,则下一个节点位置为右子树,而右子树的第一个节点则为最左的节点)。 当这个节点的右为空,意味着包括这个节点在内的左 根 右都遍历完了,那么我们就需要向上遍历。则需遵循以下:如果孩子是父亲的左就返回父亲(这就是意味着遍历完了左 接下来要遍历 根),否则就继续向上遍历,如果走到nullptr那就是遍历完成。
总结一下遍历规则:
1、如果_node的右不为空,找右孩子的最左节点
2、如果_node的右为空,如果孩子是父亲的左就返回父亲,否则就继续向上遍历,如果走到nullptr那就是遍历完成
Self& operator++(){if (_node->_right){// 下一个就是右子树的最左节点Node* cur = _node->_right;while (cur->_left){cur = cur->_left;}_node = cur;}else{// 左子树 根 右子树// 右为空,找孩子是父亲左的那个祖先Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_right){cur = parent;parent = parent->_parent;}_node = parent;}return *this;} operator--()
和上面的operator++()相似,但是我们的遍历顺序变为了右子树 根 左子树。
总结一下遍历规则:
1、如果_node的左不为空,找左孩子的最右节点
2、如果_node的左为空,如果孩子是父亲的右就返回父亲,否则就继续向上遍历,如果走到nullptr那就是遍历完成
Self& operator--(){if (_node->_left){Node* cur = _node->_left;while (cur->_right){cur = cur->_right;}_node = cur;}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_left){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}红黑树类
从之前我们所学习的红黑树的模拟实现我们可以知道,红黑树的插入等等操作中会用到对于key的比较。对此,set和map的比较要求是不同的,set可以直接用key进行比较,而map中对于pair的比较是先按first比较再比价second,而我们想要的结果是只比较first,因此我们定义了个KeyofT来对map和set进行区分。这个KeyofT则是通过传递仿函数来进行控制对于要比较值的转换。
// set->RBTree<K, K, SetKeyOfT> _t;
// map->RBTree<K, pair<const K, T>, MapKeyOfT> _t;
template<class K, class T, class KeyOfT>
class RBTree
{typedef RBTreeNode<T> Node;
public:typedef __TreeIterator<T, T&, T*> iterator;typedef __TreeIterator<T, const T&, const T*> const_iterator;iterator begin();iterator end();const_iterator begin();const_iterator end();//pair<iterator, bool> Insert(const T& data)pair<Node*, bool> Insert(const T& data);Node * Find(const K & key)private:Node* _root = nullptr;
};仿函数
注意:这里的仿函数是在map和set中定义的,我们在map和set中的迭代器实际上是就是间接的控制了RBTree的迭代器。
map
struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};set
struct SetKeyOfT{const K& operator()(const K& key){return key;}};封装后的红黑树
begin()和end()
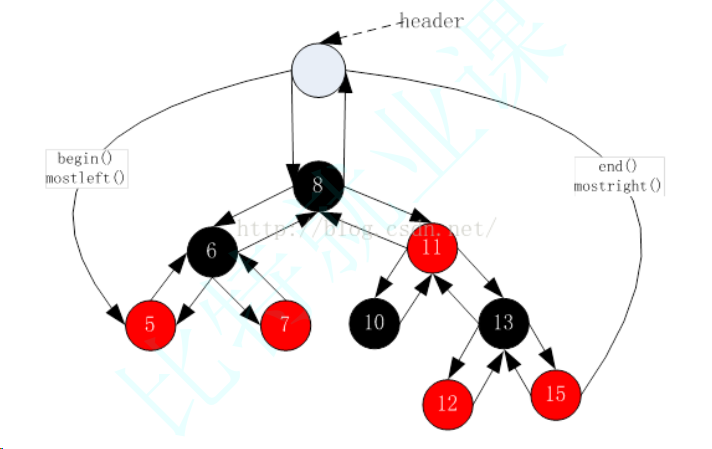
STL明确规定,begin()与end()代表的是一段前闭后开的区间,而对红黑树进行中序遍历后,可以得到一个有序的序列,因此:begin()可以放在红黑树中最小节点(即最左侧节点)的位置,end()放在最大节点(最右侧节点)的下一个位置,关键是最大节点的下一个位置在哪块?能否给成nullptr呢?答案是行不通的,因为对end()位置的迭代器进行--操作,必须要能找最后一个元素,此处就不行,因此最好的方式是将end()放在头结点的位置:
虽然但是,作者还是将end()给了nullptr,事实上勉强还是可以用的哈哈哈...
iterator begin(){Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return iterator(cur);}iterator end(){return iterator(nullptr);}const_iterator begin() const{Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return const_iterator(cur);}const_iterator end() const{return const_iterator(nullptr);}通过仿函数来控制要比较的值
注意:这里对于insert以及find中都定义了一个KeyOfT kot; 这个就是上面所提到的用于转化用于比较的数据的仿函数的定义。
其中对于insert有点需要注意:我们运用了pair中的特性,用pair<Node*, bool>接收了make_pair(newnode, true)的返回值,用pair构造了一个新的pair而不是拷贝构造了一个pair。后续会提到为什么(在set封装中)
//pair<iterator, bool> Insert(const T& data)pair<Node*, bool> Insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return make_pair(_root, true);}Node* parent = nullptr;Node* cur = _root;KeyOfT kot;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return make_pair(cur, false);}}// 新增节点给红色cur = new Node(data);Node* newnode = cur;cur->_col = RED;if (kot(parent->_data) < kot(data)){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){// g// p u// cNode* uncle = grandfather->_right;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上更新处理cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_left){// 单旋// g// p// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// 双旋// g// p// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else // parent == grandfather->_right{// g// u p // c//Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上处理cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// u p // c//RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return make_pair(newnode, true);}Node * Find(const K & key){Node* cur = _root;KeyOfT kot;while (cur!= nullptr){ if (kot(cur->_data) < key){cur = cur->_left;}else if (kot(cur->_data) > key){cur = cur->_right;}else{return cur;}}return nullptr;}完整封装
// set->RBTree<K, K, SetKeyOfT> _t;
// map->RBTree<K, pair<const K, T>, MapKeyOfT> _t;
template<class K, class T, class KeyOfT>
class RBTree
{typedef RBTreeNode<T> Node;
public:typedef __TreeIterator<T, T&, T*> iterator;typedef __TreeIterator<T, const T&, const T*> const_iterator;iterator begin(){Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return iterator(cur);}iterator end(){return iterator(nullptr);}const_iterator begin() const{Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return const_iterator(cur);}const_iterator end() const{return const_iterator(nullptr);}//pair<iterator, bool> Insert(const T& data)pair<Node*, bool> Insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return make_pair(_root, true);}Node* parent = nullptr;Node* cur = _root;KeyOfT kot;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return make_pair(cur, false);}}// 新增节点给红色cur = new Node(data);Node* newnode = cur;cur->_col = RED;if (kot(parent->_data) < kot(data)){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){// g// p u// cNode* uncle = grandfather->_right;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上更新处理cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_left){// 单旋// g// p// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// 双旋// g// p// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else // parent == grandfather->_right{// g// u p // c//Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上处理cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// u p // c//RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return make_pair(newnode, true);}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* parentParent = parent->_parent;parent->_parent = subR;if (subRL)subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* parentParent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}}void InOrder(){_InOrder(_root);cout << endl;}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}// 根节点->当前节点这条路径的黑色节点的数量bool Check(Node* root, int blacknum, const int refVal){if (root == nullptr){//cout << balcknum << endl;if (blacknum != refVal){cout << "存在黑色节点数量不相等的路径" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << "有连续的红色节点" << endl;return false;}if (root->_col == BLACK){++blacknum;}return Check(root->_left, blacknum, refVal)&& Check(root->_right, blacknum, refVal);}bool IsBalance(){if (_root == nullptr)return true;if (_root->_col == RED)return false;//参考值int refVal = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK){++refVal;}cur = cur->_left;}int blacknum = 0;return Check(_root, blacknum, refVal);}int Height(){return _Height(_root);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}size_t Size(){return _Size(_root);}size_t _Size(Node* root){if (root == NULL)return 0;return _Size(root->_left)+ _Size(root->_right) + 1;}Node * Find(const K & key){Node* cur = _root;KeyOfT kot;while (cur!= nullptr){ if (kot(cur->_data) < key){cur = cur->_left;}else if (kot(cur->_data) > key){cur = cur->_right;}else{return cur;}}return nullptr;}private:Node* _root = nullptr;
};三、map和set的封装
封装后的set
#pragma once
#include"RBTree.h"namespace bit
{template<class K>class set{public:struct SetKeyOfT{const K& operator()(const K& key){return key;}};typedef typename RBTree<K, K, SetKeyOfT>::const_iterator iterator;typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;iterator begin() const{return _t.begin();}iterator end() const{return _t.end();}pair<iterator, bool> insert(const K& key){return _t.Insert(key);}private:RBTree<K, K, SetKeyOfT> _t;};
}注意这段代码:
typedef typename RBTree<K, K, SetKeyOfT>::const_iterator iterator; typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;其中typenam是告诉编译器这里是类型因为这里是对类模板取内嵌类型。通过set的定义我们知道set不允许被修改数值,因此我们将两个迭代器实际上都定义为const_iterator。但是这样定义其中insert又出问题了,因为其中的返回类型会出现不匹配的情况,即pair<iterator, bool> 和_t.Insert(key)不匹配。因为我们return返回的实际上是iterator,而实际上接受的类型为const_iterator。这时我们上面提到的用pair构造了一个新的pair而不是拷贝构造了一个pair就起到作用了,他使得返回的类型匹配!
当然我们也有其他的解决办法:定义一个迭代器的拷贝构造
STL库中的普通迭代器都可以转换为const迭代器,这是迭代器类的拷贝构造所支持的。
如下:
struct __TreeIterator
{typedef RedBlackTreeNode<T> Node;Node* _node;typedef __TreeIterator<T,Ref,Ptr> Self;typedef __TreeIterator<T, T&, T*> iterator;__TreeIterator(const iterator& it):_node(it._node){}__TreeIterator(Node* node):_node(node){}
}
封装后的map
想较于set,map的key值不可修改,但是value是可以修改的,对于他的迭代器定义按照正常的const和非const就好,但是他主要做文章的地方是在RBTree<K, pair<const K, V>, MapKeyOfT> _t;中,直接将K定义为const K了。
#pragma once
#include"RBTree.h"namespace bit
{template<class K, class V>class map{public:struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};// 对类模板取内嵌类型,加typename告诉编译器这里是类型typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}const_iterator begin() const{return _t.begin();}const_iterator end()const{return _t.end();}V& operator[](const K& key){pair<iterator, bool> ret = insert(make_pair(key, V()));return ret.first->second;}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.Insert(kv);}private:RBTree<K, pair<const K, V>, MapKeyOfT> _t;};
}四、完整代码
RBTree.h
#pragma once// set ->key
// map ->key/valueenum Colour
{RED,BLACK
};template<class T>
struct RBTreeNode
{RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;T _data;Colour _col;RBTreeNode(const T& data):_left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _col(RED){}
};template<class T, class Ref, class Ptr>
struct __TreeIterator
{typedef RBTreeNode<T> Node;typedef __TreeIterator<T, Ref, Ptr> Self;Node* _node;__TreeIterator(Node* node):_node(node){}Ref operator*(){return _node->_data;}Ptr operator->(){return &_node->_data;}Self& operator--(){if (_node->_left){Node* cur = _node->_left;while (cur->_right){cur = cur->_right;}_node = cur;}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_left){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}Self& operator++(){if (_node->_right){// 下一个就是右子树的最左节点Node* cur = _node->_right;while (cur->_left){cur = cur->_left;}_node = cur;}else{// 左子树 根 右子树// 右为空,找孩子是父亲左的那个祖先Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_right){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}bool operator!=(const Self& s){return _node != s._node;}bool operator==(const Self& s){return _node == s._node;}
};// set->RBTree<K, K, SetKeyOfT> _t;
// map->RBTree<K, pair<const K, T>, MapKeyOfT> _t;
template<class K, class T, class KeyOfT>
class RBTree
{typedef RBTreeNode<T> Node;
public:typedef __TreeIterator<T, T&, T*> iterator;typedef __TreeIterator<T, const T&, const T*> const_iterator;iterator begin(){Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return iterator(cur);}iterator end(){return iterator(nullptr);}const_iterator begin() const{Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return const_iterator(cur);}const_iterator end() const{return const_iterator(nullptr);}//pair<iterator, bool> Insert(const T& data)pair<Node*, bool> Insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return make_pair(_root, true);}Node* parent = nullptr;Node* cur = _root;KeyOfT kot;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return make_pair(cur, false);}}// 新增节点给红色cur = new Node(data);Node* newnode = cur;cur->_col = RED;if (kot(parent->_data) < kot(data)){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){// g// p u// cNode* uncle = grandfather->_right;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上更新处理cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_left){// 单旋// g// p// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// 双旋// g// p// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else // parent == grandfather->_right{// g// u p // c//Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上处理cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// u p // c//RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return make_pair(newnode, true);}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* parentParent = parent->_parent;parent->_parent = subR;if (subRL)subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* parentParent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}}void InOrder(){_InOrder(_root);cout << endl;}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}// 根节点->当前节点这条路径的黑色节点的数量bool Check(Node* root, int blacknum, const int refVal){if (root == nullptr){//cout << balcknum << endl;if (blacknum != refVal){cout << "存在黑色节点数量不相等的路径" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << "有连续的红色节点" << endl;return false;}if (root->_col == BLACK){++blacknum;}return Check(root->_left, blacknum, refVal)&& Check(root->_right, blacknum, refVal);}bool IsBalance(){if (_root == nullptr)return true;if (_root->_col == RED)return false;//参考值int refVal = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK){++refVal;}cur = cur->_left;}int blacknum = 0;return Check(_root, blacknum, refVal);}int Height(){return _Height(_root);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}size_t Size(){return _Size(_root);}size_t _Size(Node* root){if (root == NULL)return 0;return _Size(root->_left)+ _Size(root->_right) + 1;}Node * Find(const K & key){Node* cur = _root;KeyOfT kot;while (cur!= nullptr){ if (kot(cur->_data) < key){cur = cur->_left;}else if (kot(cur->_data) > key){cur = cur->_right;}else{return cur;}}return nullptr;}private:Node* _root = nullptr;
};myset.h
pragma once
#include"RBTree.h"namespace bit
{template<class K>class set{public:struct SetKeyOfT{const K& operator()(const K& key){return key;}};typedef typename RBTree<K, K, SetKeyOfT>::const_iterator iterator;typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;iterator begin() const{return _t.begin();}iterator end() const{return _t.end();}pair<iterator, bool> insert(const K& key){return _t.Insert(key);}private:RBTree<K, K, SetKeyOfT> _t;};
}mymap.h
#pragma once
#include"RBTree.h"namespace bit
{template<class K, class V>class map{public:struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};// 对类模板取内嵌类型,加typename告诉编译器这里是类型typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}const_iterator begin() const{return _t.begin();}const_iterator end()const{return _t.end();}V& operator[](const K& key){pair<iterator, bool> ret = insert(make_pair(key, V()));return ret.first->second;}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.Insert(kv);}private:RBTree<K, pair<const K, V>, MapKeyOfT> _t;};
}感谢你耐心的看到这里ღ( ´・ᴗ・` )比心,如有哪里有错误请踢一脚作者o(╥﹏╥)o!

给个三连再走嘛~
相关文章:
【C++学习手札】基于红黑树封装模拟实现map和set
🎬慕斯主页:修仙—别有洞天 💜本文前置知识: 红黑树 ♈️今日夜电波:漂流—菅原纱由理 2:55━━━━━━️💟──────── 4:29 …...

linux查看当前路径的所有文件大小;linux查看当前文件夹属于什么文件系统
1:指令查看当前路径所有文件内存空间大小;这样可以方便查询每个文件大小情况,根据需要进行删除 df -h // 根目录 du -ah --max-depth1 // 一级目录 虚拟机 du -ah -d 1 // 一级目录 设备使用 du -ah --max-depth2 // 二…...
PPT插件-好用的插件-超级文本-大珩助手
常用字体 内置了大量的常用字体,方便快捷的一键更换字体,避免系统字体过多卡顿 文字整理 包含删空白行、清理编号、清理格式,便于处理从网络上复制的资料 文本打散与合并 包含文本打散、文本合并,文本打散可实现将一个文本打散…...

Kafka中的Topic
在Kafka中,Topic是消息的逻辑容器,用于组织和分类消息。本文将深入探讨Kafka Topic的各个方面,包括创建、配置、生产者和消费者,以及一些实际应用中的示例代码。 1. 介绍 在Kafka中,Topic是消息的逻辑通道࿰…...

LAMP部署
目录 一、安装apache 二、配置mysql 三、安装php 四、搭建论坛 4、安装另一个网站 一、安装apache 1.关闭防火墙,将安装Apache所需软件包传到/opt目录下 systemctl stop firewalld systemctl disable firewalld setenforce 0 httpd-2.4.29.tar.gz apr-1.6.2.t…...

DouyinAPI接口开发系列丨商品详情数据丨视频详情数据
电商API就是各大电商平台提供给开发者访问平台数据的接口。目前,主流电商平台如淘宝、天猫、京东、苏宁等都有自己的API。 二、电商API的应用价值 1.直接对接原始数据源,数据提取更加准确和完整。 2.查询速度更快,可以快速响应用户请求实现…...
AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 3 “编译 NXP i.MX RT1060”( 完 )
此章节叙述如何修改、建构 i.MX RT1060 的 Sample Code“aws_remote_control_wifi_nxp” 1. 点击“Import SDK example(s)” 2. 选择“MIMXRT1062xxxxA”>“evkmimxrt1060”,并确认 SDK 版本后,点击“Next>” 3. 选择“aws_examples”>“aw…...

5G - NR物理层解决方案支持6G非地面网络中的高移动性
文章目录 非地面网络场景链路仿真参数实验仿真结果 非地面网络场景 链路仿真参数 实验仿真结果 Figure 5 && Figure 6:不同信噪比下的BER和吞吐量 变量 SISO 2x2MIMO 2x4MIMO 2x8MIMOReyleigh衰落、Rician衰落、多径TDL-A(NLOS) 、TDL-E(LOS)(a)QPSK (b)16…...

python epub文件解析
python epub文件解析 代码BeautifulSoup 介绍解释 代码 import ebooklib from bs4 import BeautifulSoup from ebooklib import epubbook epub.read_epub("逻辑思维训练1200题.epub")# 解析 for item in book.get_items():# 提取书中的文本内容if item.get_type() …...

Visual Studio 2015 中 FFmpeg 开发环境的搭建
Visual Studio 2015 中 FFmpeg 开发环境的搭建 Visual Studio 2015 中 FFmpeg 开发环境的搭建新建控制台工程拷贝并配置 FFmpeg 开发文件测试FFmpeg 开发文件的下载链接 Visual Studio 2015 中 FFmpeg 开发环境的搭建 新建控制台工程 新建 Win32 控制台应用程序。 具体流程&…...

期末速成数据库极简版【存储过程】(5)
目录 【7】系统存储过程 【8】用户存储过程——带输出参数的存储过程 创建存储过程 存储过程调用 【9】用户存储过程——不带输出参数的存储过程 【7】系统存储过程 系统存储我们就不做过程讲解用户存储过程会考察一道大题,所以我们把重点放在用户存储过程。…...

Android Studio的代码笔记--IntentService学习
IntentService学习 IntentService常规用法清单注册服务服务内容开启服务 IntentService 一个 HandlerThread工作线程,通过Handler实现把消息加入消息队列中等待执行,通过传递的intent在onHandleIntent中处理任务。(多次调用会按顺序执行事件…...
C语言 - 字符函数和字符串函数
系列文章目录 文章目录 系列文章目录前言1. 字符分类函数islower 是能够判断参数部分的 c 是否是⼩写字⺟的。 通过返回值来说明是否是⼩写字⺟,如果是⼩写字⺟就返回⾮0的整数,如果不是⼩写字⺟,则返回0。 2. 字符转换函数3. strlen的使⽤和…...
Redis rdb源码解析
前置学习:Redis server启动源码-CSDN博客 1、触发时机 1、执行save命令--->rdbSave函数 2、执行bgsave命令--->rdbSaveBackground函数或者(serverCron->prepareForShutdown) 3,主从复制-->startBgsaveForReplication…...
深入理解CyclicBarrier
文章目录 1. 概念2. CylicBarier使用简单案例3. 源码 1. 概念 CyclicBarrier 字面意思回环栅栏(循环屏障),通过它可以实现让一组线程等待至某个状态(屏障点)之后再全部同时执行。叫做回环是因为当所有等待线程都被释放…...

微信小程序 - 格式化操作 moment.js格式化常用使用方法总结大全
格式化操作使用 1. 首先,下载一个第三方库 moment npm i moment --save 注:在微信小程序中无法直接npm 下载 导入 的(安装一个就需要构建一次) 解决:菜单栏 --> 工具 --> 构建 npm 点击即可(会…...
学习pytorch18 pytorch完整的模型训练流程
pytorch完整的模型训练流程 1. 流程1. 整理训练数据 使用CIFAR10数据集2. 搭建网络结构3. 构建损失函数4. 使用优化器5. 训练模型6. 测试数据 计算模型预测正确率7. 保存模型 2. 代码1. model.py2. train.py 3. 结果tensorboard结果以下图片 颜色较浅的线是真实计算的值&#x…...

电子学会C/C++编程等级考试2021年09月(五级)真题解析
C/C++等级考试(1~8级)全部真题・点这里 第1题:抓牛 农夫知道一头牛的位置,想要抓住它。农夫和牛都位于数轴上,农夫起始位于点N(0<=N<=100000),牛位于点K(0<=K<=100000)。农夫有两种移动方式: 1、从X移动到X-1或X+1,每次移动花费一分钟 2、从X移动到2*X,每…...
Halcon联合winform显示以及处理
在窗口中添加窗体和按钮,并在解决方案资源管理器中调加了导入Halcon导出的.cs文件,运行出现下图的问题: 问题1:CS0017 程序定义了多个入口点。使用/main(指定包含入口点的类型)进行编译。 解决方案1.: 右…...
【设计模式-4.3】行为型——责任链模式
说明:本文介绍设计模式中行为型设计模式中的,责任链模式; 审批流程 责任链模式属于行为型设计模式,关注于对象的行为。责任链模式非常典型的案例,就是审批流程的实现。如一个报销单的审批流程,根据报销单…...

别再只堆叠4层了!用DenseGCN构建超深图网络,点云分割mIoU提升实战
突破GCN深度瓶颈:DenseGCN在点云分割中的实战优化指南 传统图卷积网络(GCN)通常被限制在3-4层的浅层架构中,这种深度限制严重制约了其在点云分割等复杂任务中的表现。本文将揭示如何通过密集连接(Dense Connections&am…...

LT6110远程电压补偿技术原理与应用
1. 远程负载电压补偿技术解析在工业自动化、数据中心等分布式供电系统中,工程师们经常面临一个经典难题:当电源与负载之间存在较长距离时,导线电阻导致的电压下降会显著影响负载端的供电质量。这种现象的本质是欧姆定律(VIR&#…...

【NotebookLM经济学研究辅助终极指南】:20年量化研究员亲授5大高阶用法,90%学者还不知道的AI研报加速术
更多请点击: https://intelliparadigm.com 第一章:NotebookLM经济学研究辅助的底层逻辑与范式革命 NotebookLM 以语义理解为核心,将传统文献驱动的研究流程重构为“知识图谱—问题锚定—推理生成”三位一体的新范式。其底层并非依赖关键词匹…...

基于Claude的AI编程助手:从代码生成到自动化审查的全流程实践
1. 项目概述:当Claude遇上代码,一个全能型AI编程助手的诞生最近在GitHub上闲逛,发现了一个挺有意思的项目,叫“everything-claude-code”。光看名字,你可能会觉得这又是一个普通的AI代码生成工具,但实际深入…...

chipKIT平台与PIC32开发板:32位MCU的Arduino兼容方案
1. Arduino兼容的chipKIT平台与PIC32开发板概述在嵌入式开发领域,32位微控制器(MCU)正逐步取代传统的8位MCU,成为创客、学生和专业工程师的首选。Microchip Technology公司推出的chipKIT平台,正是这一趋势下的产物。chipKIT平台基于高性能的3…...

Kleiber:简化多架构Docker镜像构建与发布的自动化工具
1. 项目概述与核心价值最近在整理自己的开发工具链时,又翻出了devgap/kleiber这个项目,它在我日常的容器化开发工作流中扮演了一个相当关键但又不那么起眼的角色。简单来说,Kleiber 是一个 Docker 镜像的构建和发布自动化工具,但它…...

COMSOL声学建模实战:从无源特征频率到有源辐射边界
1. COMSOL声学建模基础:从理论到实践 声学建模在工程领域应用广泛,无论是建筑声学设计、噪声控制还是音频设备开发,都需要对声波传播特性有深入理解。COMSOL Multiphysics作为一款强大的多物理场仿真软件,提供了完整的声学建模解决…...

终极Java数据结构指南:从链表到红黑树的实现与原理
终极Java数据结构指南:从链表到红黑树的实现与原理 【免费下载链接】CodeGuide :books: 本代码库是作者小傅哥多年从事一线互联网 Java 开发的学习历程技术汇总,旨在为大家提供一个清晰详细的学习教程,侧重点更倾向编写Java核心内容。如果本仓…...

5分钟掌握网盘直链解析神器:彻底告别下载限速烦恼
5分钟掌握网盘直链解析神器:彻底告别下载限速烦恼 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘…...

Pro Workflow:基于SQLite持久化记忆的AI编程助手智能协作系统
1. 项目概述:从重复纠正到智能协作的进化如果你和我一样,每天都在用Claude Code、Cursor这类AI编程助手,那你肯定经历过这个场景:周一你告诉它“测试里别用Mock数据库”,它点头答应;周五你写新功能…...