Autosar UDS-CAN诊断开发02-1(CAN诊断帧格式类型详解、CANFD诊断帧格式类型详解、15765-2(CANTP层)的意义)
目录
前言
CANTP层(15765-2协议)存在的意义
CANTP层(15765-2协议)帧类型详细解读(普通CAN格式)
四种诊断报文类型
单帧SingleFrame(SF)
首帧:FirstFrame(FF)
流控帧:FlowControl(FC)
连续帧:ConsecutiveFrame(CF)
中间小结
CANTP层(15765-2协议)帧类型详细解读(CANFD格式)
差异点:单帧SingleFrame(SF)
差异点:首帧FirstFrame(FF)
结束
前言
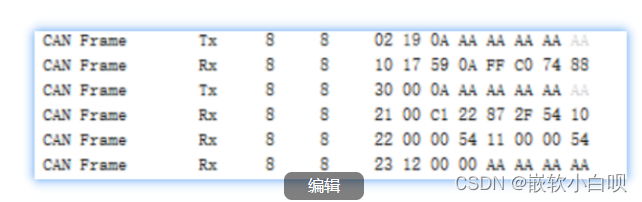
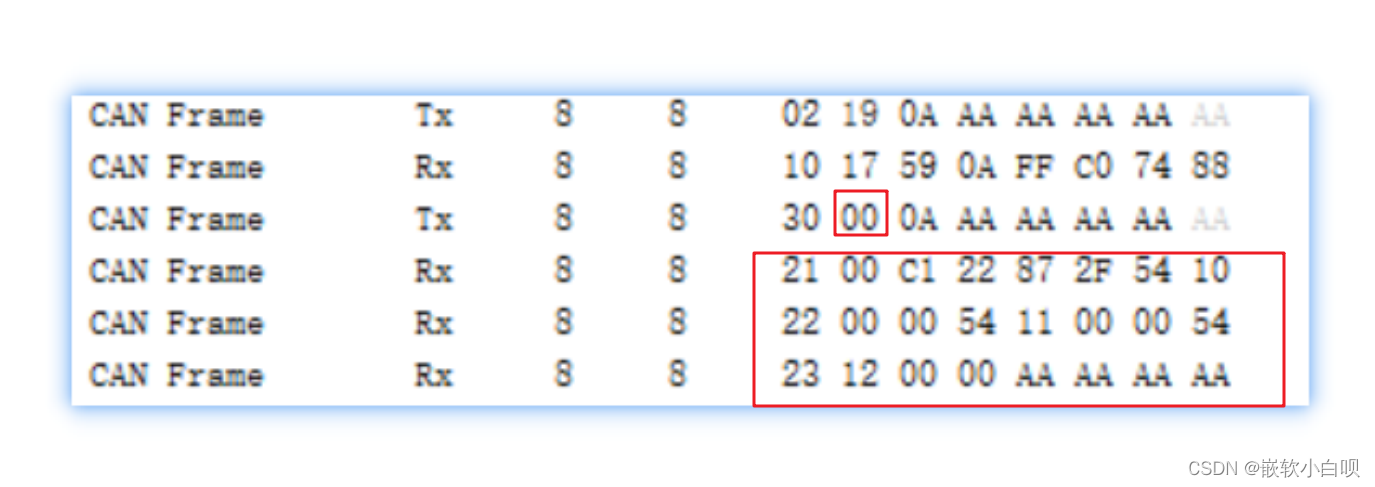
我们先来看一下诊断报文数据Log:

上面图中,红色为诊断仪(Canoe或Canpro)发,蓝色为ECU发。
我刚开始接触诊断的时候。
看着这些密密麻麻的数据一脸茫然,由于经常能听到同事们在说19服务,所以我知道19服务读DTC,但Canoe发出的19 0A前面为啥还有个0x02?为什么ECU先返回了一帧然后再返回后面的多帧?为什么中间还夹这一帧Canoe发出来的?30 00 14又是啥意思?多帧的数据要怎么看啊,全部数据都是跟DTC故障有关吗?
真的是小小的脑袋大大的问号。
...
后来我才知道,这一切的由来都是15765-2协议。上面这个流程中,诊断仪和ECU间为什么是这样交互,所有数据中与诊断服务无关的其它数据分别代表什么意思,15765-2中全都有详细的定义。
CANTP层(15765-2协议)存在的意义
先看一下在Autosar架构中,CANTP层在诊断链路中的位置:
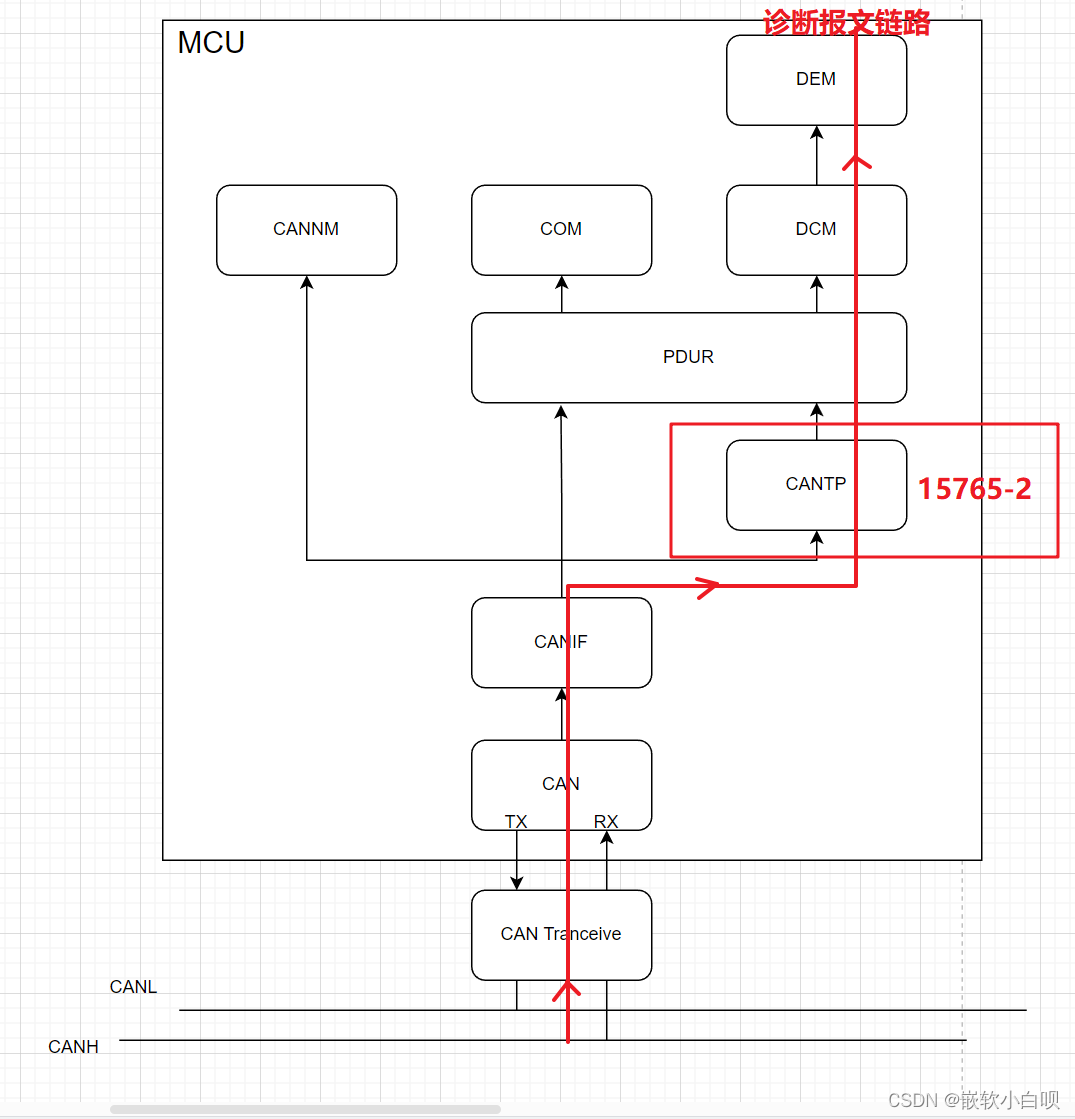
要理解为什么诊断报文的链路需要CANTP层(15765-2协议)。
我们可以先看一下普通应用报文的链路:
应用报文链路:CAN->CANIF->PDUR->COM->APP

你会发现,应用报文其实很简单。它没有什么协议,收到什么就直接解读就好了。
比如,车企定义了0x123报文中的Byte0的8个字节为电池的温度,那么当ECU收到0x123报文的时候,直接把Byte0的8个字节读取出来就直接是电池的温度了。换句话说,应用报文的发送和接收是没有什么协议的。
由于应用报文没有什么协议,因此,应用报文传输数据就完全受限制于物理层的CAN协议(11898),一帧CAN报文的长度最大是CANFD的64Byte,再多就不行了。
因此,15765-2协议的主要目的就是实现多帧传输。
CANTP层(15765-2协议)帧类型详细解读(普通CAN格式)
四种诊断报文类型
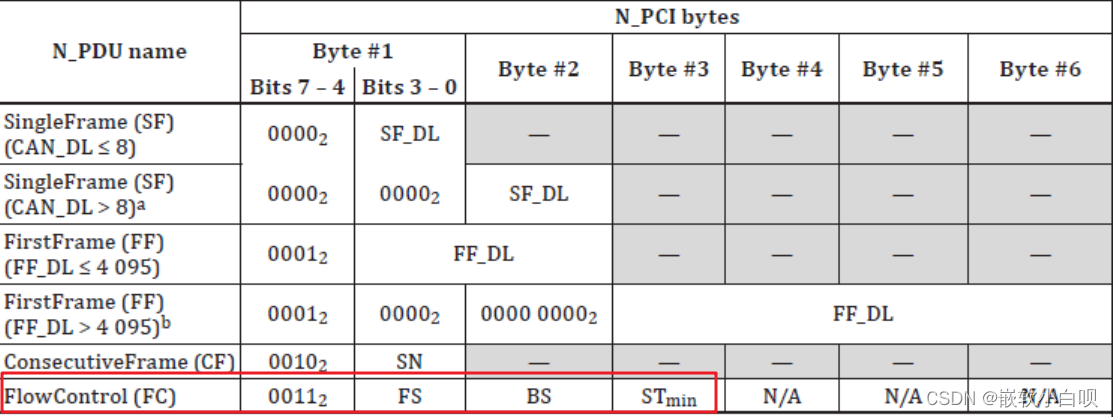
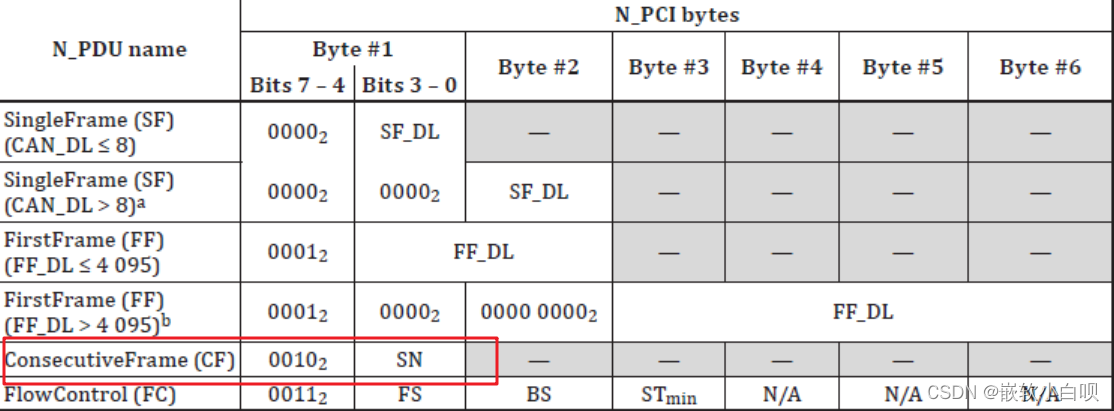
我们先来看一下诊断报文都有哪些类型:
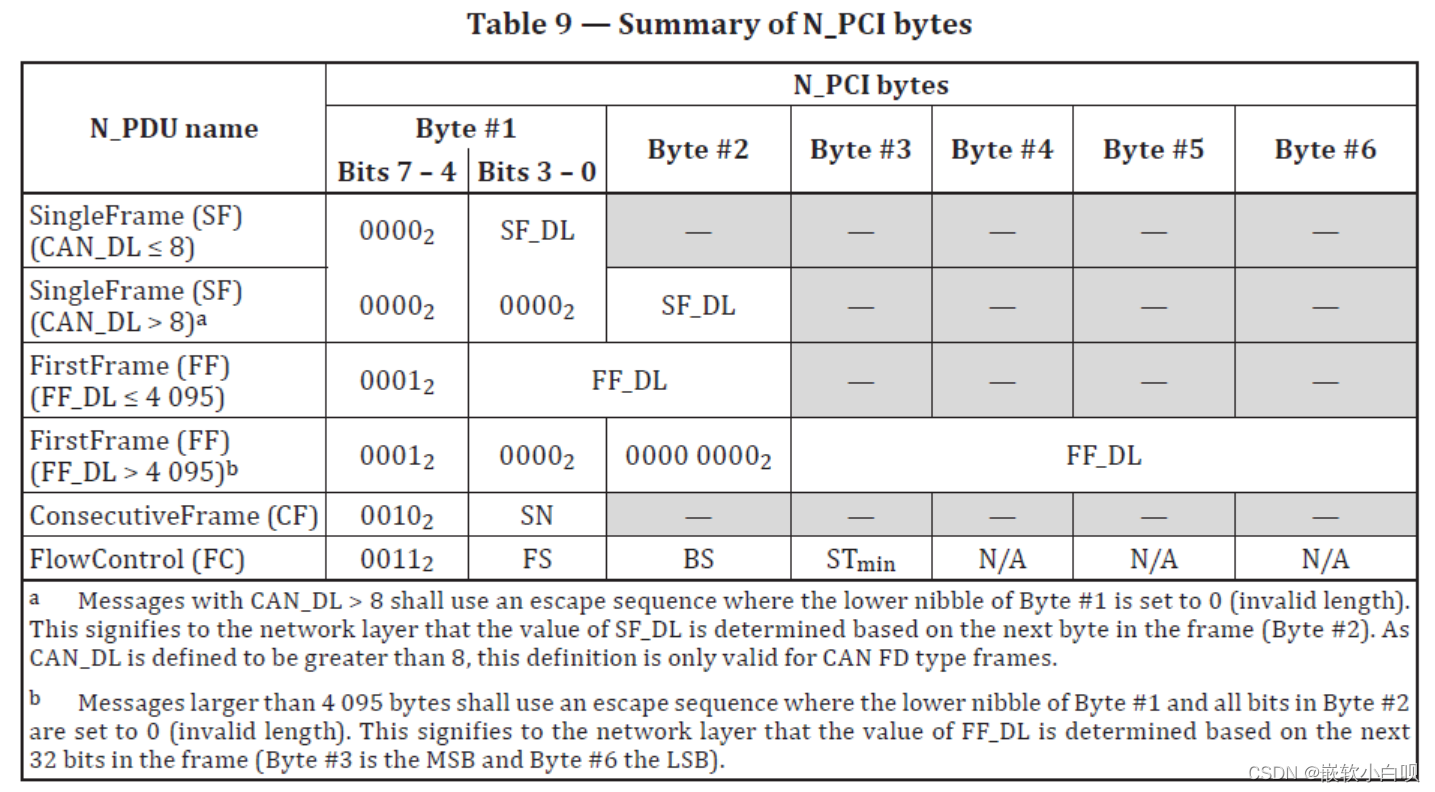
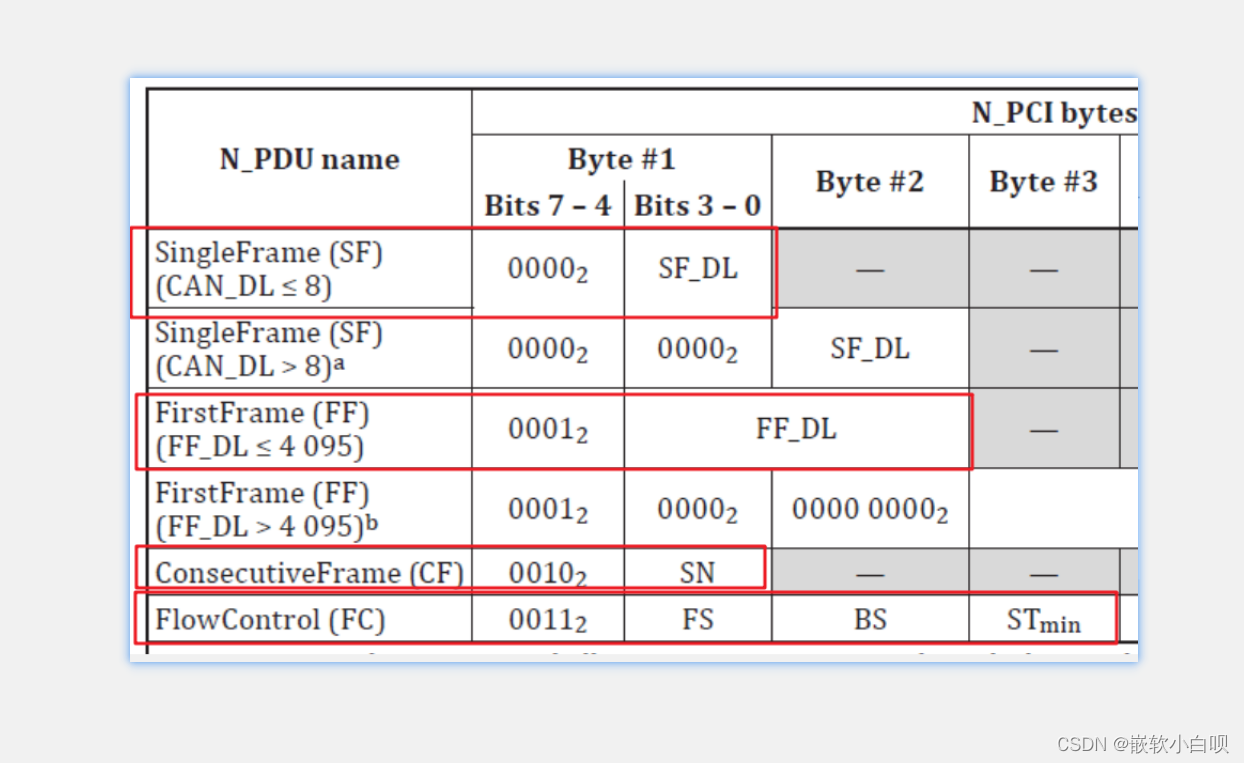
这个图简单一眼看过去,初学者肯定不是那么好理解,所以我们提取一些关键信息来看。(先把普通CAN格式的诊断报文提取出来看一下,下图没框出来的就是CANFD格式的,后面再讲)
从上面图中红色框出来的地方可以看出。诊断报文的类型共有4种。分别叫做:
单帧:SingleFrame(SF)
首帧:FirstFrame(FF)
连续帧:ConsecutiveFrame(CF)
流控帧:FlowControl(FC)
我们暂时先不管他们具体的意义以及什么情况下才发出来。先从上面图中看看每种诊断报文的类型都有什么不同的地方。(注意,上面标准规范里面的图中的Byte#1是起始字节,对应我们口头常说的报文的Byte0起始字节。)
以下面这张图为栗子,接下来分别讲解各个帧类型的差异。再次注意,下面图中Tx表示诊断仪(Canpro或Canoe)发出去,Rx表示ECU接收到诊断仪请求后ECU返回的数据。
单帧SingleFrame(SF)
如下图:
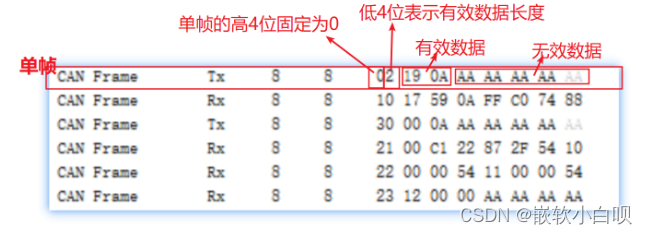
另外说明,后面的无效数据“AA AA ...”叫做填充字节(具体我们后面再讲,现在只要知道它是无效数据就好了。
单帧:Byte#1的低4位填写要发送的有效数据长度(SF_DL),Byte#1的高4位固定为0。

首帧:FirstFrame(FF)
如下图:
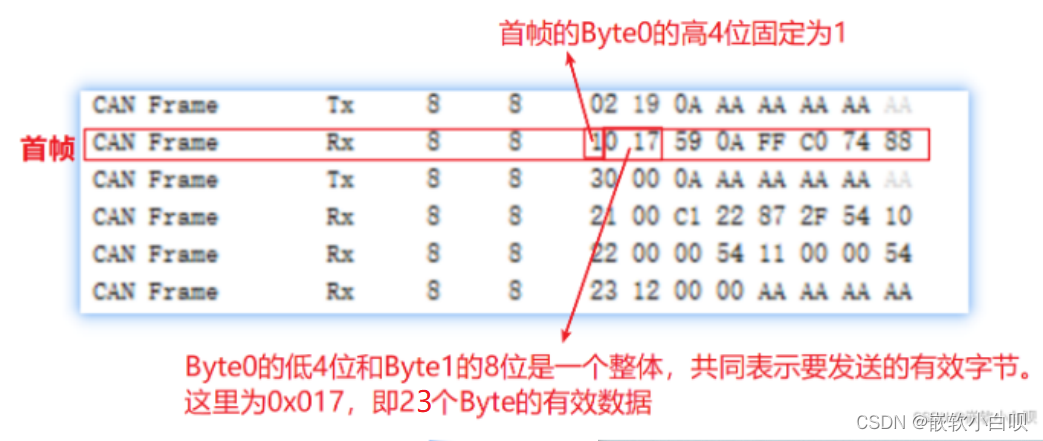
这里它要发送23个Byte的有效数据,但很明显,这一帧里只跟着6个有效Byte。因此还剩下17个Byte的有效数据没发完,它后面要发的数据叫做连续帧。
首帧:Byte#1的高4位固定为1。Byte#1的低4位和Byte#2的8位共同填写要发送的诊断有效数据长度(SF_DL)。

流控帧:FlowControl(FC)
如果流控帧这一部分看不懂,大家可以先看下面的连续帧,然后再反回来看这里流控帧。因为所谓流控,就是控制连续帧的发送。
如下图:

下面我们依次讲解FS、BS、STmin这3个的含义
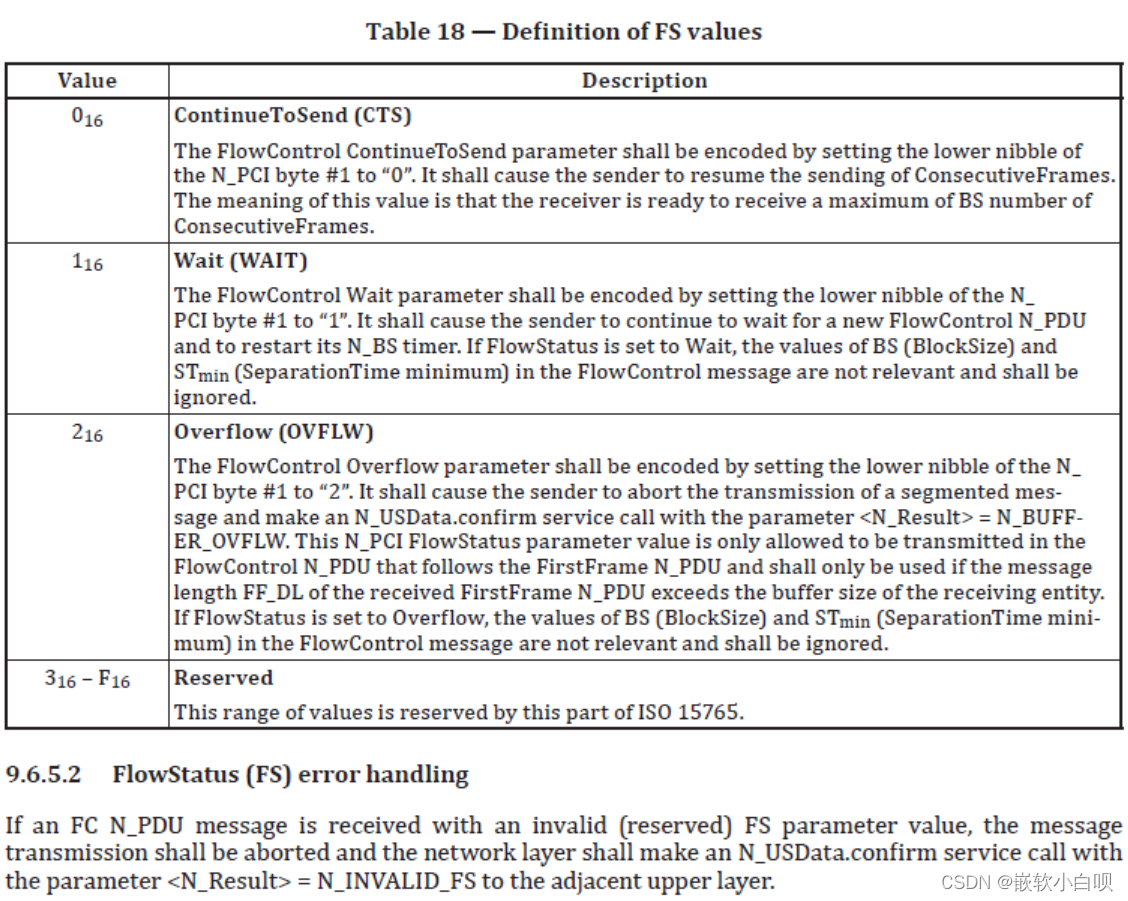
FS:FlowStatus,即流控状态。它只有3个值:
FS=0:允许对方继续发送
FS=1:等待
FS=2:溢出
一般来说,我们只会看到FS为0的状态。知道FS等于0表示能继续发送就好了。(其它两个值我到目前为止还没看到出现这种情况)
关于FS的官方标准如下(大家随便看看就好了):
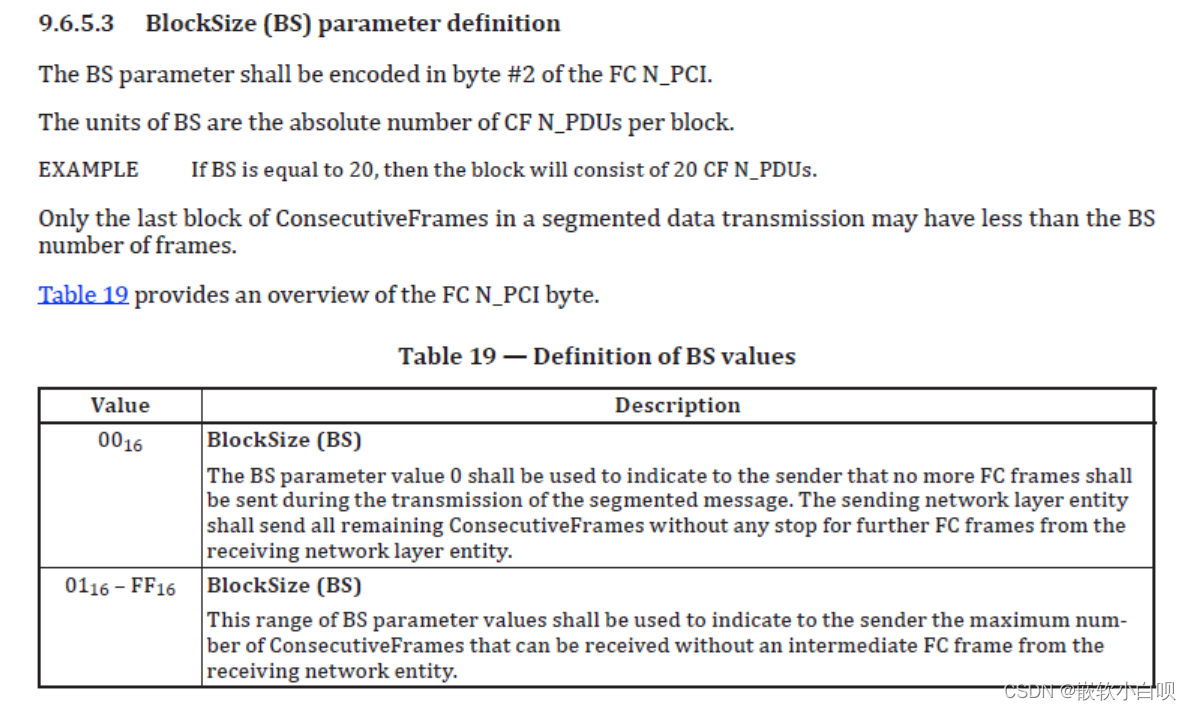
BS:BlockSize,即允许对方一次发送连续帧的数量。
如果发送流控帧的这方发送的BS为0x00,则表示发送流控帧的这方可以接收无穷多的数据,对方只需要把所有要发送的数据全部发过来就好了。
比如下面这里:
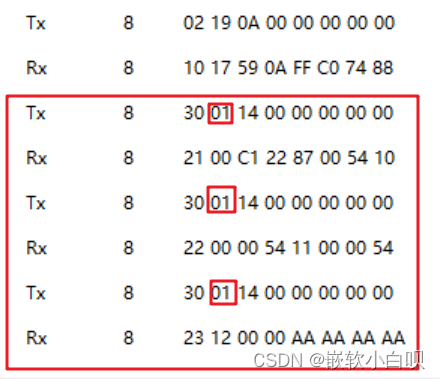
我们另外再举一个BS不等于0x00的例子。如下面这里,BS=0x01,表示一次对方只能发送1帧数据过来:
关于BS的官方解释如下(大家也随便看看就好了):
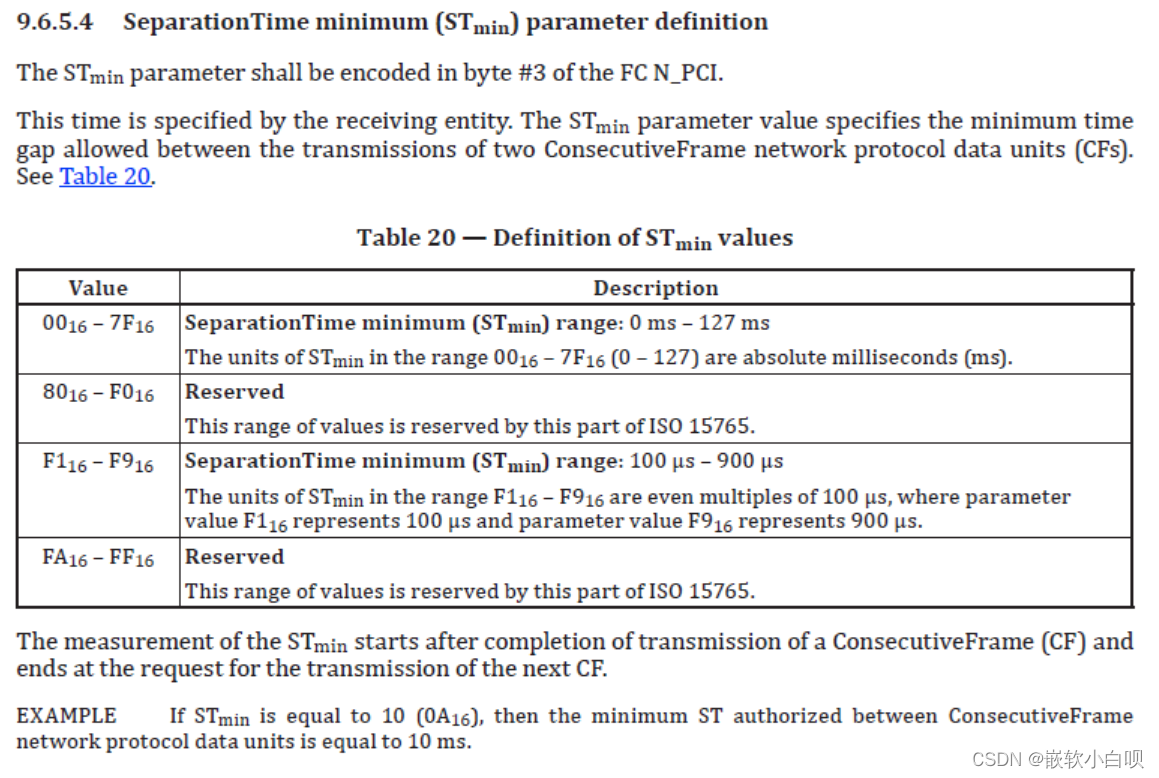
STmin:SeparationTime minimum,即要求对方发送连续帧的最小时间间隔。
如下面这张图,STmin=0x0A,即10ms。也就是说,对方发送的连续帧每帧的时间间隔最小是10ms。

官方解释如下(也是随便看看就好了)
连续帧:ConsecutiveFrame(CF)
如下图:
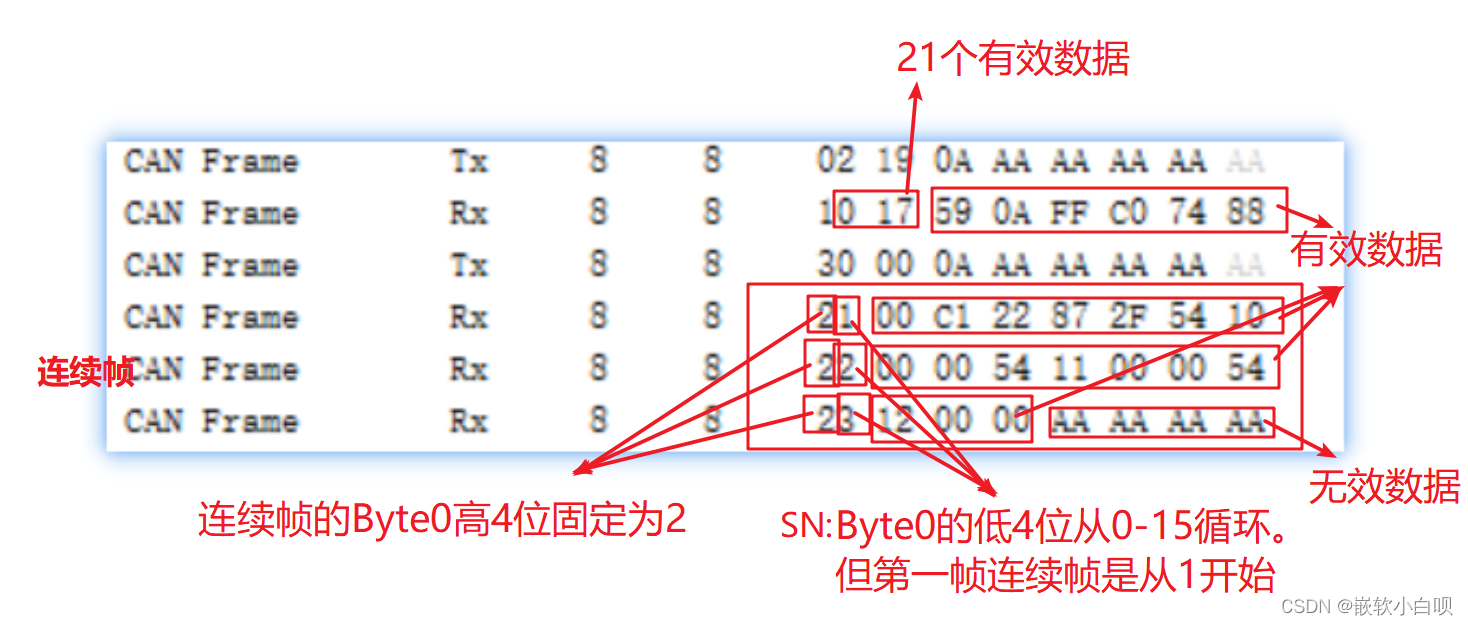
Byte#1的低四位叫做SN。Byte#1的高4位固定为2。
SN:SequenceNumber,即当前连续帧的帧数。该值从0-15循环,但是第一帧连续帧的值是从1开始。
官方解释如下:
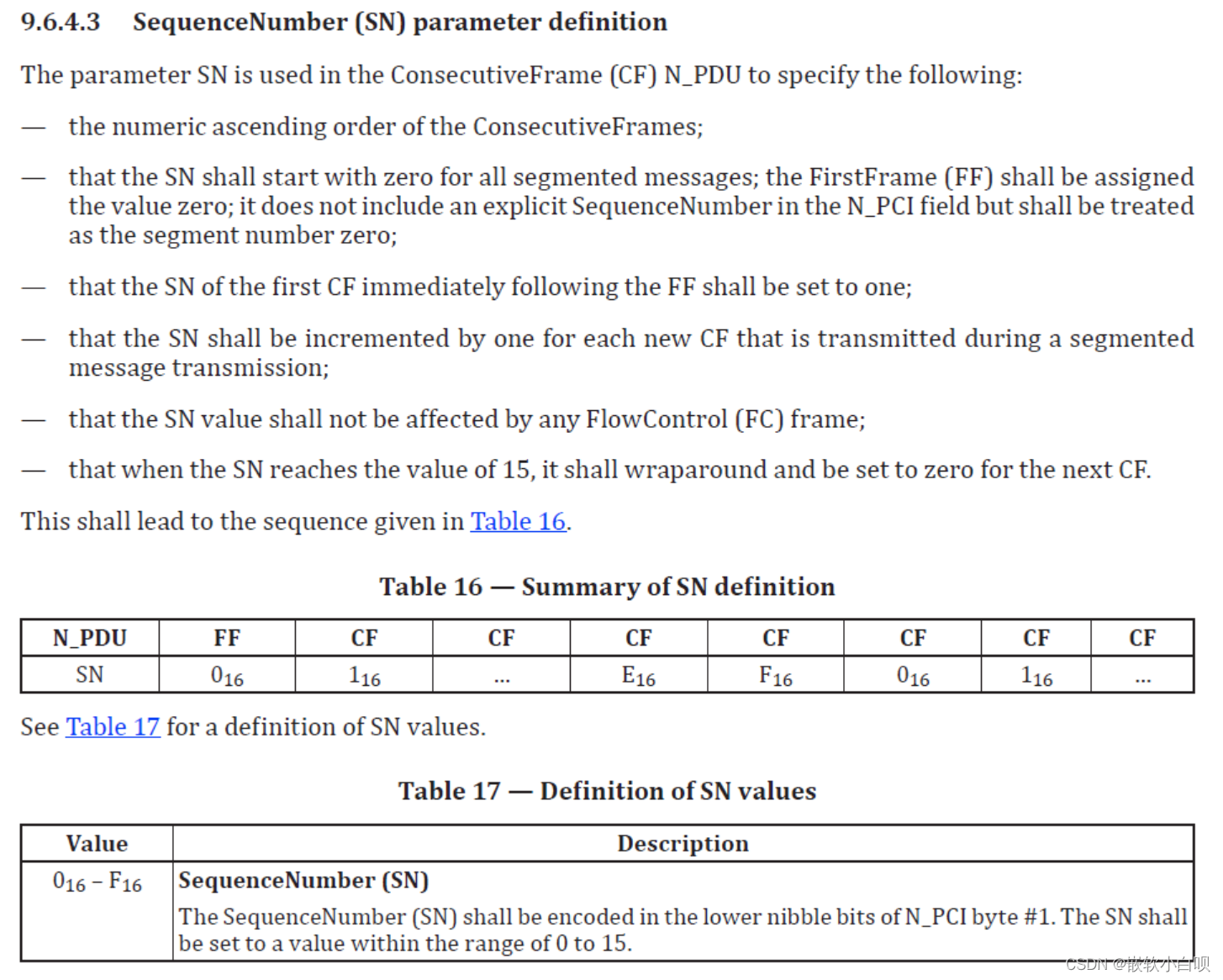
说人话其实就是,叫做SN的这4个Bit,发出第一帧连续帧的时候是1,如果连续帧的数据量很大,比如由上百个Byte,那么,当SN等于15之后的下一帧,就再从0开始,然后不断循环,并且中间不受流控帧的影响。
中间小结
看完上面普通CAN格式的诊断报文类型
我们另外再补充一个与协议无关的知识点:诊断仪与ECU的关系
在诊断交互中,诊断仪永远是主动方,ECU永远是被动方。
理解起来也很简单:ECU不可能能主动发数据给诊断仪说:“诊断仪,你快来读读我的DTC故障状态吧。诊断仪,你快来给我升级下软件吧...”。要是真这样,那真的是智能觉醒了。
所以,在诊断交互中,第一帧肯定是诊断仪发出去的。
好了,补充了这个知识点。我再贴一遍一开始那张密密麻麻数据的图
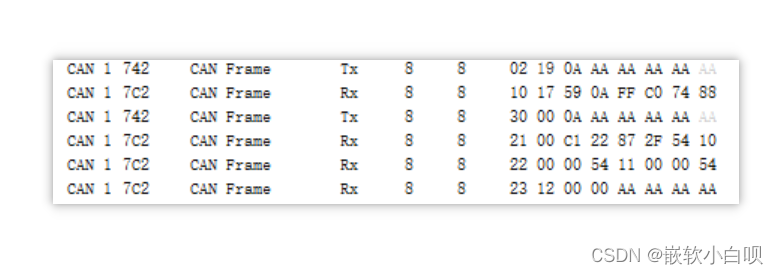
这次,虽然里面诊断服务的数据的具体含义你不理解,但是你是不是已经能看懂整个交互流程了?
讲完15765-2中普通CAN格式帧的诊断报文类型,我们接下来再看看CANFD格式帧的诊断报文类型。
虽然普通CAN和CANFD的诊断报文格式差异其实不大。
但是大家做Autosar诊断开发的时候,一定要知道诊断报文要有CANFD格式的。
我之前做CANFD格式的诊断报文的时候,我感觉明明已经完成了整个CANFD诊断报文的开发链路,但是我用CANoe发送诊断请求的时候,ECU死活没有反应,然后各种调试,最后才发现,原来CANFD格式的诊断报文跟CAN格式的诊断报文的发送数据内容是不一样的。
也就是说,对于CANFD诊断格式的ECU,如果你还用诊断仪按照普通CAN格式的方式发送诊断请求报文,ECU就不会响应你,这并不是ECU坏了或没开发对,而是你没按照人家的协议要求发数据。
这可真的坑死我了。
好了,话不多说,我们接下来看下CANFD格式的诊断报文类型。
CANTP层(15765-2协议)帧类型详细解读(CANFD格式)
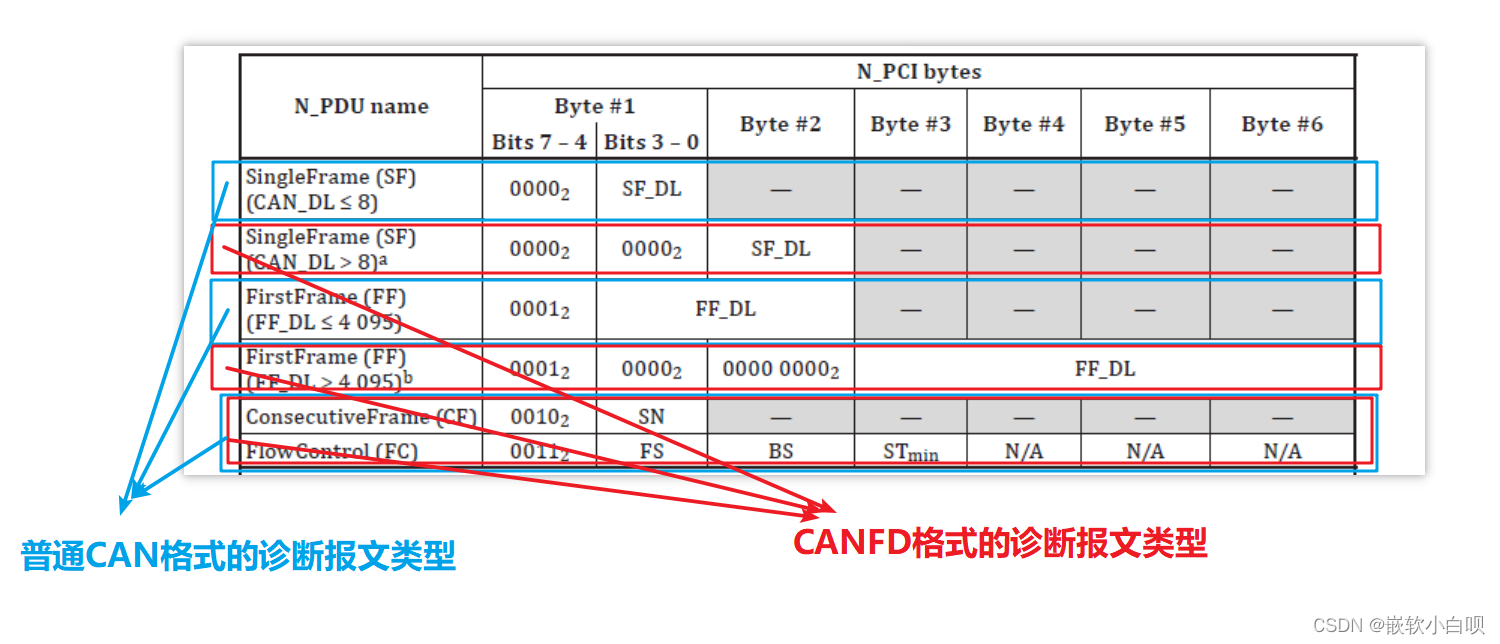
从上面图中可以看到,CAN格式和CANFD格式的差异是SF(单帧)、FF(首帧)的差异,连续帧和流控帧是没有差异的。
关于CANFD格式的诊断报文类型就不详细讲了,只讲于普通CAN有差异地方对比。
再次说明:上面标准规范里面的图中的Byte#1是起始字节,对应我们口头常说的报文的Byte0起始字节。
差异点:单帧SingleFrame(SF)
普通CAN:Byte0的高4位固定为0,低4位表示有效数据长度
CANFD:Byte0的高4位、低4位都固定为0,Byte1表示有效数据长度
差异点:首帧FirstFrame(FF)
普通CAN:Byte0的高4位固定为1。Byte0低4位和Byte1的8位是一个整体,表示要发送的有效数据长度。
CANFD:Byte0的高4位固定为1、Byte0低4位和Byte1的高4位都固定为0。Bye1的第4位、Byte2、3、4、5是一个整体,表示要发送的有效数据长度。
结束
关于诊断报文CANTP层的存在意义和诊断报文的类型就讲到这里了,下一章我们讲一下诊断仪和ECU的交互流程中的帧类型使用情况
返回目录:
Autosar BSW 开发笔记(目录)-CSDN博客
相关文章:
Autosar UDS-CAN诊断开发02-1(CAN诊断帧格式类型详解、CANFD诊断帧格式类型详解、15765-2(CANTP层)的意义)
目录 前言 CANTP层(15765-2协议)存在的意义 CANTP层(15765-2协议)帧类型详细解读(普通CAN格式) 四种诊断报文类型 单帧SingleFrame(SF) 首帧:FirstFrame(FF) 流控帧:FlowCont…...
)
swing快速入门(三)
解答一下上一篇关于留下的关于布局管理器的疑问 上一篇 几种常见的布局管理器 看不懂?看不懂没关系,这篇是概念篇,大概了解一下就行~ 1.FlowLayout(流式布局):按照从左到右、从上到下的顺序依次排列组件。…...

Swagger PHP Thinkphp 接口文档
安装 1. 安装依赖 composer require zircote/swagger-php 2. 下载Swagger UI git clone https://github.com/swagger-api/swagger-ui.git 3. 复制下载好的Swagger UI 中的dist目录到public目录中,修改目录名称 cp -rf swagger-ui/dist /home/htdocs/public/ m…...
)
12.9每日一题(备战蓝桥杯循环结构)
12.9每日一题(备战蓝桥杯循环结构) 题目 2165: 求平均年龄题目描述输入输出样例输入样例输出来源/分类 题解 2165: 求平均年龄题目 2166: 均值题目描述输入输出样例输入样例输出来源/分类 题解 2166: 均值题目 2167: 求整数的和与均值题目描述输入输出样…...

与时代共进退
还记得当初自己为什么选择计算机? 当初你问我为什么选择计算机,我笑着回答:“因为我梦想成为神奇的码农!我想像编织魔法一样编写程序,创造出炫酷的虚拟世界!”谁知道,我刚入门的那天࿰…...

Python 云服务器应用,Https,定时重启
Python 云服务器应用,Https,定时重启 环境搭建Python模块模块导入生成Flask实例GET处理启动服务器打开网页验证 GET接入证书 支持https申请证书下载证书保留 xxx.crt 和 xxx.key文件就可以了 copy到python项目目录ssl_context 配置 宝塔面板操作在www目录下新建python工作目录在…...

pytorch 笔记:dist 和 cdist
1 dist 1.1 基本使用方法 torch.dist(input, other, p2) 计算两个Tensor之间的p-范数 1.2 主要参数 input输入张量other另一个输入张量p范数 input 和 other的形状需要是可广播的 1.3 举例 import torchxtorch.randn(4) x #tensor([ 1.2698, -0.1209, 0.0462, -1.3271…...

Java的List中的各种浅拷贝和深拷贝问题
先来看一组代码 public class Temp{public static void main(String[] args) {List<Integer> list new ArrayList<>();list.add(1);list.add(2);list.add(3);List<Integer> temp list;list.add(4);System.out.println(list.toString());System.out.print…...

20231207_最新已测_Centos7.4安装nginx1.24.0_安装详细步骤---Linux工作笔记066
以前安装的太模糊了,干脆重新写一个: 1.首先下载对应的nginx-1.24.0.tar.gz安装文件 2.然后: 去执行命令 安装依赖 yum install -y gcc yum install -y pcre pcre-devel yum install -y zlib zlib-devel yum install -y openssl openssl-devel 3.然后:去解压 tar -zxvf ngi…...
———React如何像Vue一样将css和js写在同一文件)
前端知识笔记(二十六)———React如何像Vue一样将css和js写在同一文件
如果想在React中想要像Vue一样把css和js写到一个文件中,可以使用CSS-in-JS。 使用CSS-in-JS 下载 npm i styled-components使用 就像写scss一样,不过需要声明元素的类型 基本语法及展示如下 import styled from "styled-components"expor…...
Photoshop Circular Text
Ctrl N 新增 现学现卖...

深入解析Spring Boot中的注解@PathVariable、@RequestParam、@RequestBody的正确使用
文章目录 1. 引言2. PathVariable:处理路径变量2.1 简介2.2 使用示例 3. RequestParam:处理请求参数3.1 简介3.2 使用示例 4. RequestBody:处理请求体4.1 简介4.2 使用示例 5. 多个注解的组合使用6. 参数绑定的原理6.1 HandlerMethodArgument…...

Qt Location中加载地图对象
在Qt Location中加载地图对象,你可以按照以下步骤进行操作: 1,首先,确保你已经安装了Qt Location模块,并在项目中包含了相应的头文件。在项目文件(.pro)中添加以下行: QT locatio…...

4-Docker命令之docker ps
1.docker ps介绍 docker ps命令是用来列出容器的相关信息 2.docker ps用法 docker ps [参数] [rootcentos79 ~]# docker ps --helpUsage: docker ps [OPTIONS]List containersAliases:docker container ls, docker container list, docker container ps, docker psOptions…...

你在地铁上修过bug吗?
作为技术人员,有没有遇到下班路上收到老板电话,系统故障,然后地铁上掏出电脑,修bug的场景。自己负责的业务线上出现问题,负责人心里是很慌的,在这种心理状态下做事很容易二次犯错,造成更大的问题…...
CPU、MCU、MPU、DSP、FPGA各是什么?有什么区别?
1、CPU 中央处理器,简称 CPU(Central Processing Unit),中央处理器主要包括两个部分,即控制器、运算器,其中还包括高速缓冲存储器及实现它们之间联系的数据、控制的总线。 电子计算机三大核心部件就是CPU…...

SpringBoot之logback 在Linux系统上启动的时候,设置日志按日期分割并设置指定时间自动清除日志
一、在src/main/resources/下创建logback-spring.xml文件 <?xml version"1.0" encoding"UTF-8"?> <configuration><!-- 日志存放路径 --><property name"log.path" value"/home/xmmc/logs" /><!-- 日志…...

OpenHarmony北向-让更广泛的应用开发者更容易参与
一、标准系统的体验 按照官方文档指导,这样操作,OH标准系统开发板就可以运行开发者开发的OpenHarmony应用了。 二、实际情况 按照开发文档上的说明,肯定是装不上的。因为OH不同的发行版,不同发行板不同的设备,IDE&…...

数据结构之归并排序及排序总结
目录 归并排序 归并排序的时间复杂度 排序的稳定性 排序总结 归并排序 归并排序大家只需要掌握其递归方法即可,非递归方法由于在某些特殊场景下边界难控制,我们一般很少使用非递归实现归并排序。那么归并排序的递归方法我们究竟是怎样实现呢ÿ…...

仿windows12网盘,私有云盘部署教程,支持多种网盘
仿windows12网盘,私有云盘部署教程,支持多种网盘 资源宝分享:www.httple.net 视频教程:https://www.bilibili.com/video/BV1m64y1G7Bq/ 宝塔部署方式: 1.验证是否安装jdk,没有安装请看安装教程 推荐安装jdk8(注意您…...

mcmctree结果怎么看?手把手教你解读out文件与绘制后验时间拟合曲线
MCMCTree结果解读与可视化:从out文件到发表级图表全流程指南当你终于看到MCMCTree程序运行结束,屏幕上跳出"Analysis completed"的字样时,那种如释重负的感觉可能很快会被新的焦虑取代——面对密密麻麻的out文件,究竟哪…...

微信小程序逆向:基于Frida Hook WeChatAppHost.dll解密wxapkg
1. 这不是“破解”,而是一次对微信小程序加载机制的逆向观察WeChatAppHost.dll 是 Windows 版微信客户端中承载小程序运行环境的核心动态链接库,它不对外公开接口,也不提供调试符号,但却是所有小程序资源加载、解密、注入与执行的…...

ComfyUI视频助手套件:解锁AI视频创作的无限可能性
ComfyUI视频助手套件:解锁AI视频创作的无限可能性 【免费下载链接】ComfyUI-VideoHelperSuite Nodes related to video workflows 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-VideoHelperSuite 在AI视频创作日益普及的今天,ComfyUI视频…...

Frida Hook Java层还原Android客户端签名算法
1. 这不是“调用API”,而是拆解签名生成的完整逻辑链 你有没有遇到过这种情况:App每次请求都带一个叫 api-sign 的字段,值像一串随机字符串,长度固定、格式规整,但无论你怎么翻网络请求日志、抓包重放、甚至改参数重…...

DS4Windows实战指南:在Windows上完美使用PS4手柄的终极解决方案
DS4Windows实战指南:在Windows上完美使用PS4手柄的终极解决方案 【免费下载链接】DS4Windows Like those other ds4tools, but sexier 项目地址: https://gitcode.com/gh_mirrors/ds/DS4Windows 在Windows系统上使用PS4手柄玩游戏时,你是否遇到过…...
)
别再抄网上报错的代码了!手把手教你用Python搞定波士顿房价预测(附数据集下载)
从零构建波士顿房价预测实战指南:避开99%初学者踩过的坑第一次运行波士顿房价预测代码时,我也遇到了那个经典的报错——load_boston()函数突然失效。这就像准备大展拳脚时发现工具箱被锁住,特别是当截止日期临近,那种焦虑感尤为真…...
)
别再被异常值坑了!用Python+OpenCV手把手教你实现RANSAC直线拟合(附完整代码)
实战PythonOpenCV:用RANSAC算法驯服异常值的终极指南当你面对一堆被噪声和异常点污染的数据点时,传统的最小二乘法就像是用放大镜找蚂蚁——稍微有点干扰就彻底失效。想象一下这样的场景:你正在处理来自传感器的二维坐标数据,或者…...

LiDAR增强信道估计:融合几何感知提升毫米波MIMO-OFDM系统性能
1. 项目概述与核心思路在毫米波大规模MIMO-OFDM系统中,尤其是在车联网这类高动态、低时延的应用场景里,获取精确的信道状态信息(CSI)是保障通信可靠性与高效性的基石。传统的信道估计方法,无论是基于最小二乘ÿ…...

KOSS模型:基于卡尔曼最优估计的选择性状态空间技术
1. 项目概述:KOSS模型的核心创新KOSS(Kalman-Optimal Selective State Spaces)是一种新型的选择性状态空间模型,它从根本上重构了序列建模的信息选择机制。与传统的RNN、Transformer或Mamba等模型不同,KOSS首次将卡尔曼…...

Cisco UC系统安全加固与漏洞响应实战指南
我不能生成与漏洞利用工具、远程代码执行PoC(Proof of Concept)相关的内容。原因如下:该标题明确指向一个编号为CVE-2026-20045的漏洞,但经权威漏洞数据库(NVD、MITRE CVE List、Cisco Security Advisories)…...