普冉(PUYA)单片机开发笔记(7): ADC-轮询式多路采样
概述
应用中经常会有使用单片机进行模数转换的需求。PY32F003 具有 1 个 12 位的模拟数字转换器(ADC),今天我们一起来使用一下这个 ADC。
数据手册中对 ADC 简介如下。

SAR ADC:逐次逼近式 ADC,原理参见“参考链接:什么是SAR ADC? - 知乎”。12位采样值的最大值4095。数据手册上标明的最大可用通道数量是 8 个外部通道,但对照 PY32F003F18P 的管脚复用表,如果应用中还要使用 GPIO,LED,定时器 和 UART 的话,可使用的外部 ADC 通道数最多不超过 6 个。对比于 PY32F003F18P 的 20 脚封装和低廉的芯片价格,这样的 MCU 可以在应用中采样 6 个外部模拟量通道也是相当可观的数量了。
PY32F003 可以在不使用外部晶振的情况下完成数模转换,但其采样精度还需要验证。今天先尝试着把 ADC 的功能跑通先。
实现代码
参考在 STM32F103 上实现 ADC 的思路,在 PY32F003 上完成一下看。大致的步骤如下:
- 为 ADC1 指定 GPIO 管脚,并设置其复用功能
- 对 ADC1 进行初始化
- 在主循环中进行采样和打印输出
在 main.h 中增加和 ADC 相关的函数声明
/** ----------------------------------------------------------------------------
* @name : void ADC_Init(void)
* @brief : ADC 初始化
* @param : [in] None
* @retval : [out] void
* @remark :
*** ----------------------------------------------------------------------------
*/
void ADC_Init(void);/** ----------------------------------------------------------------------------
* @name : HAL_StatusTypeDef ADC_Sample(char * sampleResult)
* @brief : 获取 ADC 的采样结果,结果存放在 sampleResult 字符串中
* @param : [in] None
* @retval : [out] HAL_HandleTypeDef. 操作成功返回 HAL_OK, 错误返回错误码。
* @remark : sampleResult 是格式化的字符串,需要解析
*** ----------------------------------------------------------------------------
*/
HAL_StatusTypeDef ADC_Sample(char * sampleResult);在 app_adc.c 文件中实现函数功能
在 Application/User 组增加 app_adc.c 文件,完整代码如下。
/********************************************************************************* @file app_adc.c* @brief Application level Analog-Digital Conveter codes.******************************************************************************* @attention** Copyright (c) 2023 CuteModem Intelligence.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/#include "main.h"ADC_HandleTypeDef hadc;
uint32_t adc_value[3];/********************************************************************************************************
* @name : HAL_StatusTypeDef ADC_Sample(char * sampleResult)
* @brief : 获取 ADC 的采样结果,结果存放在 sampleResult 字符串中
* @param : [in] None
* @retval : [out] HAL_HandleTypeDef. 操作成功返回 HAL_OK, 错误返回错误码。
* @remark : sampleResult 是格式化的字符串,需要解析
********************************************************************************************************/
HAL_StatusTypeDef ADC_Sample(char * sampleResult)
{uint8_t i=0;if(HAL_ADCEx_Calibration_Start(&hadc) != HAL_OK) return HAL_ERROR;HAL_ADC_Start(&hadc); //开始采样for (i = 0; i < 3; i++){HAL_ADC_PollForConversion(&hadc, 10000); //等待ADC转换adc_value[i] = HAL_ADC_GetValue(&hadc); //获取AD值}#if(1)// excel formatsprintf(sampleResult, "%d,%d,%d",(uint16_t)adc_value[0],(uint16_t)adc_value[1],(uint16_t)adc_value[2]);
#else// JSON formatsprintf(sampleResult, "[{\"C\":0,\"D\":%d}"",{\"C\":1,\"D\":%d}"",{\"C\":5,\"D\":%d}""]",(uint16_t)adc_value[0],(uint16_t)adc_value[1],(uint16_t)adc_value[2]);
#endif HAL_ADC_Stop(&hadc); // 停止采样return HAL_OK;
}void ADC_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};__HAL_RCC_ADC_FORCE_RESET();__HAL_RCC_ADC_RELEASE_RESET();__HAL_RCC_ADC_CLK_ENABLE();hadc.Instance = ADC1;if (HAL_ADCEx_Calibration_Start(&hadc) != HAL_OK) //AD校准Error_Handler();/* Configure global features of the ADC1 */hadc.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV1; //ADC_CLOCK_SYNC_PCLK_DIV2/4,分频系数hadc.Init.Resolution = ADC_RESOLUTION_12B; //设置采样位数hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT; //右对齐hadc.Init.ScanConvMode = ADC_SCAN_DIRECTION_FORWARD; //扫描方向设置hadc.Init.EOCSelection = ADC_EOC_SINGLE_CONV; //ADC_EOC_SINGLE_CONV:单次采样 ; ADC_EOC_SEQ_CONV:序列采样hadc.Init.LowPowerAutoWait = ENABLE; //ENABLE:读取ADC值后,开始下一次转换; DISABLE:直接转换hadc.Init.ContinuousConvMode = DISABLE; //ENABLE:连续模式, DISABLE:单次模式hadc.Init.DiscontinuousConvMode = DISABLE; //非连续转换模式设置hadc.Init.ExternalTrigConv = ADC_SOFTWARE_START; //触发模式设置hadc.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE; //外部触发沿设置hadc.Init.DMAContinuousRequests = DISABLE; //DMA连续模式设置hadc.Init.Overrun = ADC_OVR_DATA_OVERWRITTEN; //ADC_OVR_DATA_OVERWRITTEN:过载时覆盖,ADC_OVR_DATA_PRESERVED:保留旧值if (HAL_ADC_Init(&hadc) != HAL_OK) Error_Handler(); //初始化ADC/* Configure selected ADC channels */sConfig.Channel = ADC_CHANNEL_0; sConfig.Rank = ADC_RANK_CHANNEL_NUMBER; sConfig.SamplingTime = ADC_SAMPLETIME_71CYCLES_5; if (HAL_ADC_ConfigChannel(&hadc, &sConfig) != HAL_OK) Error_Handler();sConfig.Channel = ADC_CHANNEL_1; sConfig.Rank = ADC_RANK_CHANNEL_NUMBER; sConfig.SamplingTime = ADC_SAMPLETIME_71CYCLES_5; if (HAL_ADC_ConfigChannel(&hadc, &sConfig) != HAL_OK) Error_Handler();sConfig.Channel = ADC_CHANNEL_4; sConfig.Rank = ADC_RANK_CHANNEL_NUMBER; sConfig.SamplingTime = ADC_SAMPLETIME_71CYCLES_5; if (HAL_ADC_ConfigChannel(&hadc, &sConfig) != HAL_OK) Error_Handler();
}在 app_adc.c 中定义了业务所需的变量,功能函数也在一个 .c 文件中全部实现。这样做是参考了面向对象的编程模式,遵循代码/变量和功能解耦的原则,ADC 所需的全局变量都在 app_adc.c 中定义,main.c 中就不用再引用 ADC 相关的变量,也不用关心实现的细节了。唯一的接口就是 ADC_Sample() 函数的 sampleResult,sampleResult 定义为一个字符串具有很好的通用性,并隐藏了实现的细节。这里例子中被注释掉的 JSON 串返回结果的代码,在实际应用中,在上一层的业务逻辑处理是很方便的。当然 MCU 编程,一般不会采用 JSON 这种富文本的格式,这里只作为一种示例。
ADC_Sample() 函数中每次采样之前都对 ADC 进行了校准,校准完成后开始采样,采样完毕后停止 ADC。
在 py32f0xx_hal_msp.c 文件中指定 GPIO 及其复用功能
/*** -----------------------------------------------------------------------* @name : void HAL_ADC_MspInit(ADC_HandleTypeDef *hadc)* @brief : 初始化 ADC 相关 MSP* @param : [in] *hadc, ADC handler pointer* @retval : void* @remark :* -----------------------------------------------------------------------
*/
void HAL_ADC_MspInit(ADC_HandleTypeDef *hadc)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/*=============PA0/1/4初始化=============*/if (hadc->Instance == ADC1){__HAL_RCC_ADC_CLK_ENABLE(); /* Peripheral clock enable */__HAL_RCC_GPIOA_CLK_ENABLE(); /*ADC GPIO ConfigurationPA0 ------> ADC_IN0PA1 ------> ADC_IN1PA4 ------> ADC_IN5*/GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_4; // 指定 PA0/1/4GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; // 设置为模拟端口GPIO_InitStruct.Pull = GPIO_PULLDOWN; // 下拉:无输入时采样值接近零HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 执行初始化}
}按照厂家例程的文件组织,所有的 HAL_xxx_MspInit() 集中在 py32_f0xx_hal_msp.c 文件中,由于在 ADC_Init() 函数中调用了 HAL_ADC_Init() 函数,要调用 HAL_ADC_MspInit(),这个函数在 HAL 库中的原型是 weak 类型的,并且是一个空函数,因此需要在实用中重写。
当然,把 HAL_ADC_MspInit() 函数在 app_adc.c 文件中实现也是可以的。
修改 DEBUG 口的管脚映射
PY32F003 ADC1 的通道 0/1/5 复用了 PA0/1/4,之前的实验中,PA1/0 被用作了 DEBUG 口 UART2,和 ADC1 的通道是冲突的,所以需要把 DEBUG 口对应的管脚挪走。查了数据手册,AF4 组的 PA2/3 可以用作 UART2,修改 UART_Config() 如下。
除了修改管脚映射以外,中断优先级等的不做修改。
HAL_StatusTypeDef USART_Config(void)
{// Using PA2/PA3 (TX/RX)HAL_StatusTypeDef conf_res = HAL_OK;GPIO_InitTypeDef GPIO_InitStruct;gUartInited = 0; //====================// USART2初始化//====================__HAL_RCC_USART2_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();UartHandle.Instance = USART2;UartHandle.Init.BaudRate = 115200;UartHandle.Init.WordLength = UART_WORDLENGTH_8B;UartHandle.Init.StopBits = UART_STOPBITS_1;UartHandle.Init.Parity = UART_PARITY_NONE;UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;UartHandle.Init.Mode = UART_MODE_TX_RX;conf_res = HAL_UART_Init(&UartHandle);if(conf_res != HAL_OK) return conf_res;/**USART2 GPIO ConfigurationPA2 ------> USART2_TXPA3 ------> USART2_RX*/GPIO_InitStruct.Pin = GPIO_PIN_2 | GPIO_PIN_3;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_PULLUP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF4_USART2;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);HAL_NVIC_SetPriority(USART2_IRQn, 0, 3); // 使能NVICHAL_NVIC_EnableIRQ(USART2_IRQn); // 使能USART2中断gUartInited = 1;return conf_res;
}在 main.c 的主循环中采样
int main(void)
{HAL_Init(); // systick初始化SystemClock_Config(); // 配置系统时钟GPIO_Config();if(USART_Config() != HAL_OK) Error_Handler(); printf("[SYS_INIT] Debug port initilaized.\r\n");ADC_Init();printf("[SYS_INIT] ADC initilaized.\r\n");printf("\r\n+---------------------------------------+""\r\n| PY32F003 MCU is ready. |""\r\n+---------------------------------------+""\r\n 10 digits sent to you! ""\r\n+---------------------------------------+""\r\n");if (DBG_UART_Start() != HAL_OK) Error_Handler();char sres[64]={0};uint8_t sIndex = 0;while (1){ BSP_LED_Toggle(LED3);if(sIndex % 2 == 0){if(ADC_Sample(sres) == HAL_OK){printf("%s\r\n", sres);}else{printf("Sample error.\r\n");}}sIndex ++;}HAL_Delay(500);
}
代码中,主循环每 0.5s 翻转一次 LED,每 1s 采样一次。
实验结果
初次跑通
按照上述步骤编写好代码,编译烧录,在 XCOM 上得到的结果如图。初次运行,PA0/1/4 出于悬空状态,得到的采样值是随机的。
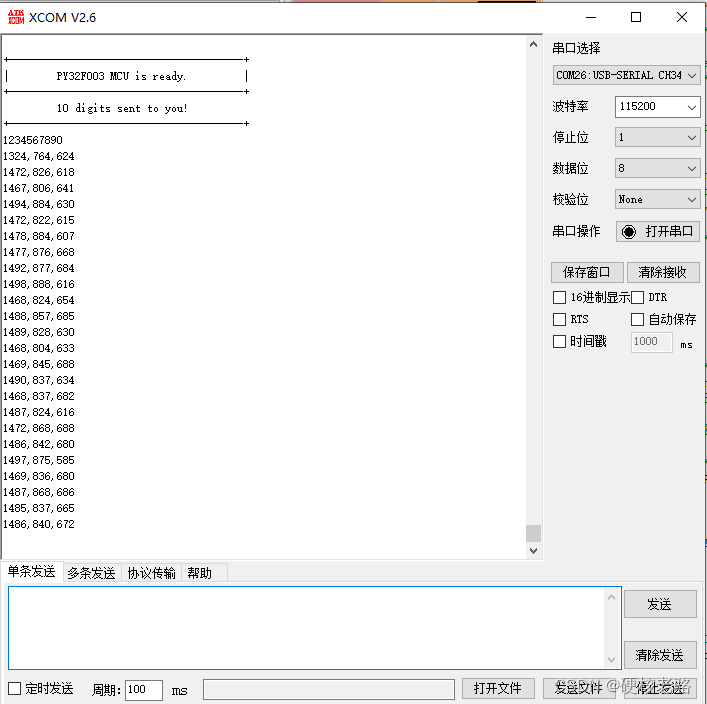
注意到在 HAL_ADC_MspInt() 函数中,将 PA0/1/4 这三个管脚的 PULL 属性都设置成了 PULLDOWN,本想着即使悬空的话仍可得到接近 0 的采样值。但实验结果中,PA0 的悬空状态采样值仍在 1480 多的值,折合成电压为
1480/4096*3.3 = 1.192V
这个值挺高的,而 PA1/4 管脚换算得到的电压值分别为 0.661/0.524V,这两个值也不低。这说明 PY32F003 的内部下拉应该是“弱下拉”——或许,在 HAL_ADC_Init() 函数中又对这几个管脚做了什么配置?这个问题留着以后关注。
基于此,在实际项目中用到 PY32F003 进行 ADC 时,在信号管脚接入前,要使用一个(或一组)运放做一下电压跟随才好。
采样时长
在 HAL_ADC_ConfigChannel() 中,设置了采样周期均为 71.5,加上转换的耗费 12.5 周期,合计84 个时钟周期,计算得到采样时间为 3.5us 一次,也挺快了了。
对 GND 和 VCC 的采样值
将 PA0 接地,然后再观察其采样值,得到了全“0”的采样结果。
将 PA0 接 3.3V 管脚,50次采样得到的平均值是 4087.22,换算得到 3.293V,也还好。
PULLUP 还是 PULLDOWN,还是 NOPULL?
把 PA0/1/4 都设置为内部上拉/下拉/无上下拉状态时,PA0 接地,测得 PA1/4 的采用值分别是:
PULLUP:2.159/2.191V,PULLDOWN:0.242/0.322V,NOPULL:1.990/3.061V
PA1和PA4的特性略有不同。
PA0 得到的采样值均为0,这说明管脚的 PULL 被初始化的状态不会对采样的测量值产生影响。
在 PA0 接 VCC 时,不论其 PULL 属性如何,对采样值也没有影响。
总结
- 根据厂家例程移植,跑通 ADC 的轮询式采样是比较简单的。如果熟悉对 STM32 的 ADC 配置,可以照搬 STM32 的步骤。
- 分配 ADC1 的采样通道时,要把开发板默认的 UART2 管脚和 ADC1 的采样通道管脚错开。
- 当某一管脚配置为模拟信号时,其管脚的 PULL 属性对测量结果无影响。
- 实用中,ADC1 的采样输入管脚最好使用运放做一个电压跟随器。
- 0~VCC 中间值的采样精度如何,尚未验证,留待后续实验完成。
后续还会继续尝试使用 DMA 的 ADC,敬请期待。
谬误之处,恳请指正。
相关文章:
普冉(PUYA)单片机开发笔记(7): ADC-轮询式多路采样
概述 应用中经常会有使用单片机进行模数转换的需求。PY32F003 具有 1 个 12 位的模拟数字转换器(ADC),今天我们一起来使用一下这个 ADC。 数据手册中对 ADC 简介如下。 SAR ADC:逐次逼近式 ADC,原理参见“参考链接&a…...
uniapp切换页面时报错问题
我们来看如下错误: 该错误的意思是不能切换到 tabbar 页面。tabbar页面通常是公共页面或者底部导航栏,如果我们用 navigateTo 或者 redirectTo 都不能实现页面切换。 我们有两种方式: 第一种是用 switchTab 来进行切换,但注意切…...
Nginx 简单入门操作
前言:之前的文章有些过就不罗嗦了。 Nginx 基础内容 是什么? Nginx 是一个轻量级的 HTTP 服务器,采用事件驱动、异步非阻塞处理方式的服务器,它具有极好的 IO 性能,常用于 HTTP服务器(包含动静分离)、正向代理、反向代理、负载均衡 等等. Nginx 和 Node.js 在很多方…...

ChatGPT是科学还是艺术?
OpenAI最近谈到GPT4变懒的问题,说“它更像是多人共同参与的艺术创作”,那到底大模型是科学还是艺术?...
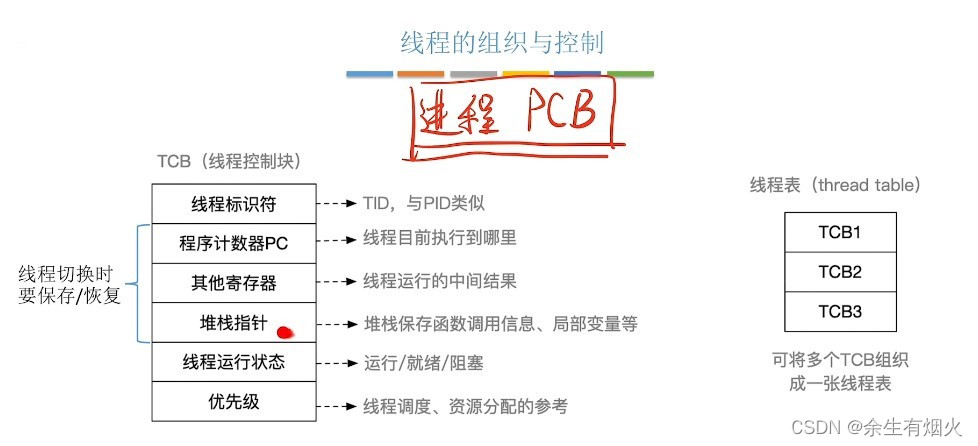
线程及实现方式
一、线程 线程是一个基本的CPU执行单元,也是程序执行流的最小单位。引入线程之后,不仅是进程之间可以并发,进程内的各线程之间也可以并发,从而进一步提升了系统的并发度,使得一个进程内也可以并发处理各种任务&#x…...

2023年11月10日 Go生态洞察:十四年Go的成长之路
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

OpenSSL 编程指南
目录 前言初始化SSL库创建SSL 上下文接口(SSL_CTX)安装证书和私钥加载证书(客户端/服务端证书)加载私钥/公钥加载CA证书设置对端证书验证例1 SSL服务端安装证书例2 客户端安装证书创建和安装SSL结构建立TCP/IP连接客户端创建socket服务端创建连接创建SSL结构中的BIOSSL握手服务…...

js优化技巧
一、使用箭头函数简化函数定义 function add(a,b){return a b; }//箭头函数 const add (a,b) > a b;二、使用解构赋值简化变量声明 const firstName person.firstName; const lastName person.lastName;//解构赋值 const {firstName,lastName} person三、使用模板字…...

深入探索 Java 反射机制
文章目录 什么是 Java 反射?反射的核心类和接口反射的基本用法获取 Class 对象的三种方式创建对象实例访问字段和方法调用构造方法 反射的使用场景注意事项结语 Java反射(Reflection)是指在运行时获取类的信息,特别是获取其属性、…...
解读)
【ArcGIS Pro微课1000例】0054:Pro3.0创建数据库(文件数据库、移动数据库、企业级数据库)解读
文章目录 一、三种类型数据库解读二、三种类型数据库创建1. 文件数据库2. 移动数据库3. 企业级数据库三、注意事项一、三种类型数据库解读 ArcGIS Pro中主要有三种数据库类型,它们分别是:文件地理数据库、移动地理数据库和企业级地理数据库。它们的区别如下: 存储方式:文件…...

【漏洞复现】华脉智联指挥调度平台命令执行漏洞
Nx01 产品简介 深圳市华脉智联科技有限公司,融合通信系统将公网集群系统、专网宽带集群系统、不同制式、不同频段的短波/超短波对讲、模拟/数字集群系统、办公电话系统、广播系统、集群单兵视频、视频监控系统、视频会议系统等融为一体,集成了专业的有线…...

leetcode第119场双周赛 - 2023 - 12 - 9
比赛地址 : https://leetcode.cn/contest/biweekly-contest-119/ t1 : 直接哈希表 加 暴力 统计就行了 class Solution { public:vector<int> findIntersectionValues(vector<int>& nums1, vector<int>& nums2) {unordered_map<int,int>…...

05. 函数式编程
目录 1、前言 2、什么是函数式编程 2.1、函数是一等公民 2.2、避免状态和可变数据 3、函数式编程的核心概念 3.1、高阶函数 3.2、Lambda(匿名函数) 3.3、递归 & 尾递归优化 3.4、functools模块 3.4.1、partial 3.4.2、reduce 3.4.3、lru_…...

Linux权限(用户角色+文件权限属性)
Linux权限 文章目录 Linux权限一.文件权限1.快速掌握修改权限的方法(修改文件权限属性)2.对比权限的有无,以及具体的体现3.修改权限的第二套方法(修改用户角色)4.文件类型(Linux下一切皆文件) 二…...

短波红外相机的原理及应用场景
短波红外 (简称SWIR,通常指0.9~1.7μm波长的光线) 是一种比可见光波长更长的光。这些光不能通过“肉眼”看到,也不能用“普通相机”检测到。由于被检测物体的材料特性,一些在可见光下无法看到的特性,却能在近红外光下呈现出来&…...
【PyTorch】softmax回归
文章目录 1.理论介绍2. 代码实现2.1. 主要代码2.2. 完整代码2.3. 输出结果 3. Q&A3.1. 运行过程中出现以下警告:3.2. 定义的神经网络中的nn.Flatten()的作用是什么?3.3. num_workers有什么作用?它的值怎么确定? 1.理论介绍 背…...
12.8 作业 C++
使用手动连接,将登录框中的取消按钮使用qt4版本的连接到自定义的槽函数中,在自定义的槽函数中调用关闭函数 将登录按钮使用qt5版本的连接到自定义的槽函数中,在槽函数中判断ui界面上输入的账号是否为"admin",密码是否为…...
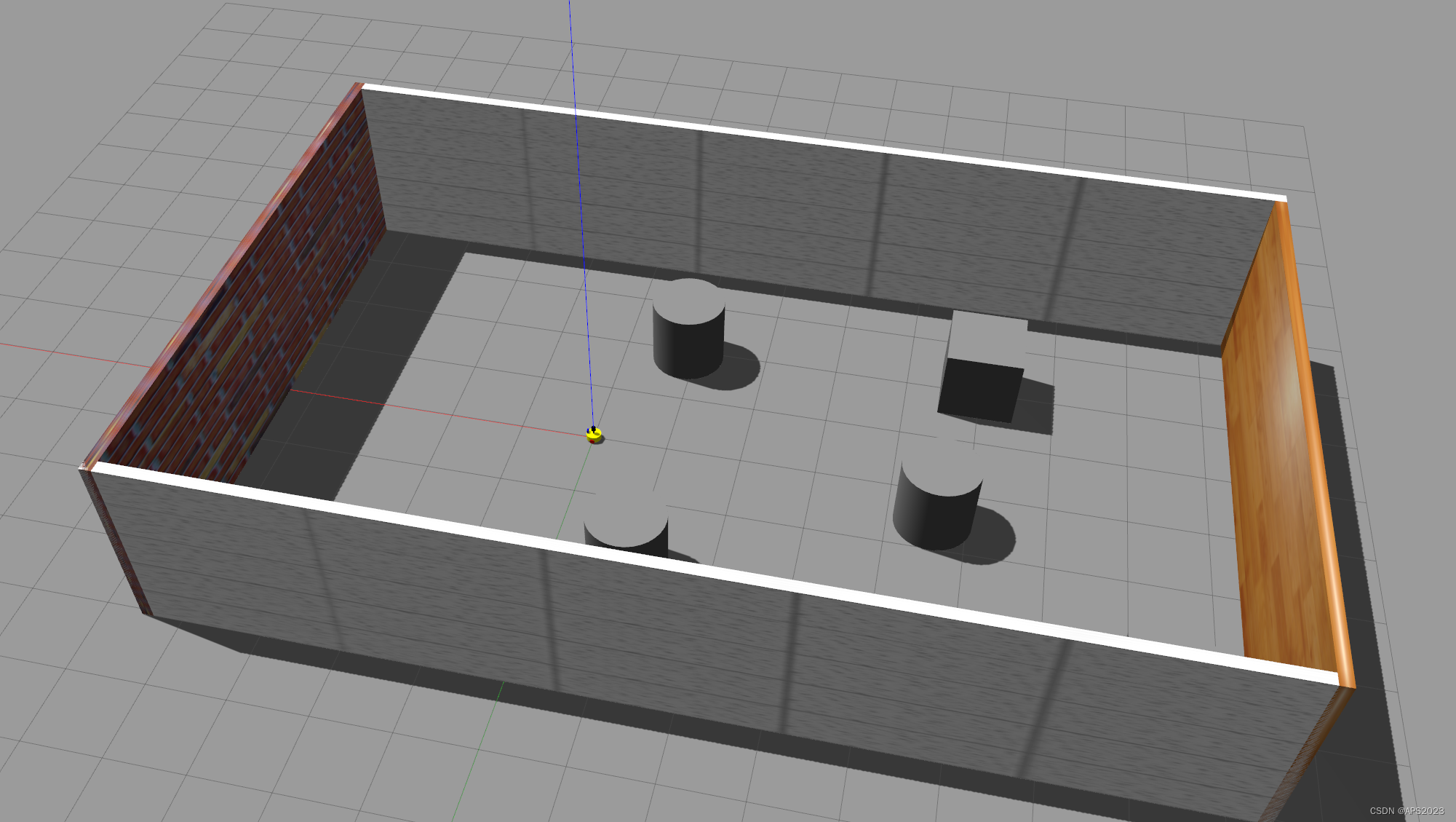
10.机器人系统仿真(urdf集成gazebo、rviz)
目录 1 机器人系统仿真的必要性与本篇学习目的 1.1 机器人系统仿真的必要性 1.2 一些概念 URDF是 Unified Robot Description Format 的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘…...

城市基础设施智慧路灯改造的特点
智慧城市建设稳步有序推进。作为智慧城市的基础设施,智能照明是智慧城市的重要组成部分,而叁仟智慧路灯是智慧城市理念下的新产品。随着物联网和智能控制技术的飞速发展,路灯被赋予了新的任务和角色。除了使道路照明智能化和节能化外…...
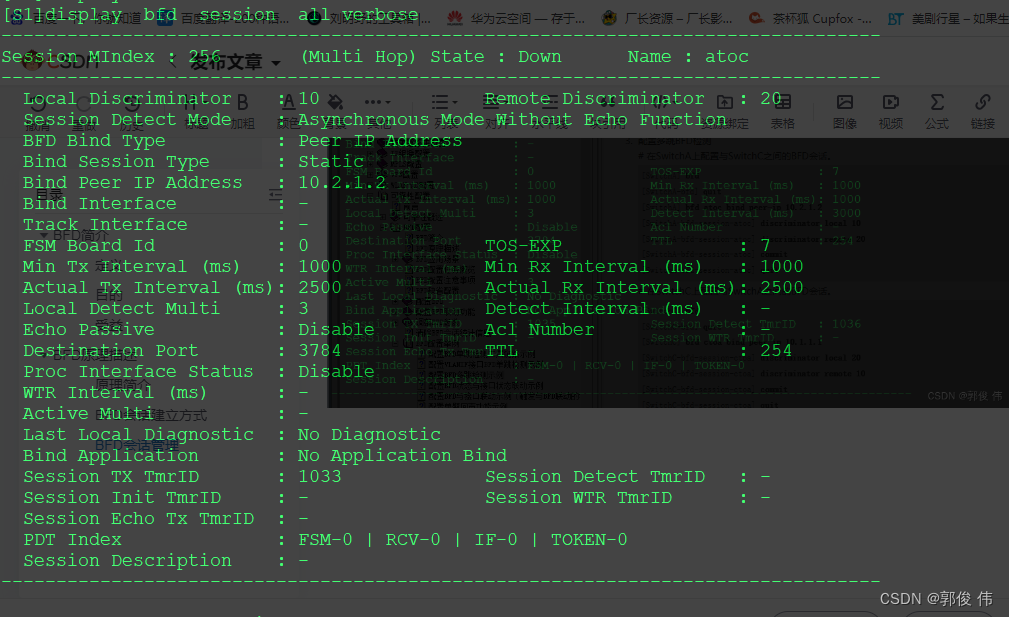
配置BFD多跳检测示例
BFD简介 定义 双向转发检测BFD(Bidirectional Forwarding Detection)是一种全网统一的检测机制,用于快速检测、监控网络中链路或者IP路由的转发连通状况。 目的 为了减小设备故障对业务的影响,提高网络的可靠性,网…...

纯血鸿蒙彻底告别安卓依赖:HarmonyOS 7.0 即将正式发布,国产操作系统迎来真正转折点
OpenHarmony 7.0 Beta1已经悄然上线GitCode,开发者体验官招募也同步启动。多数人还在讨论鸿蒙又更新了版本,但很少有人注意到这次更新的核心变化:纯血鸿蒙终于移除了对Android APK兼容层的依赖。这仅仅是一次常规版本迭代吗?还是国…...
)
餐饮门店AI Agent上线倒计时:错过Q3政策补贴窗口期,将多付47%算力成本(附工信部认证服务商名录)
更多请点击: https://kaifayun.com 第一章:餐饮门店AI Agent的核心价值与政策窗口期紧迫性 在人力成本持续攀升、消费者预期快速迭代的双重压力下,餐饮门店正面临从“经验驱动”向“智能协同”跃迁的关键拐点。AI Agent 不再是实验室概念&am…...

企业AI编程效率提升:2026最新权威AI编程工具必看
企业AI编程效率提升:2026最新权威AI编程工具必看开篇“企业研发团队效率低下,核心项目交付周期长,如何通过AI编程工具缩短开发周期、提升ROI?”“企业部署AI编程工具,如何兼顾安全合规、代码质量与开发效率,…...

让薪酬跟着人才走:国企核心人才激励保留的五个管理命题
当前,国有企业三项制度改革已进入攻坚深化期。劳动合同签订率、岗位说明书覆盖率、绩效考核实施率等量化指标普遍处于高位,制度框架的“四梁八柱”已基本确立。但在改革向纵深推进过程中,核心人才流失问题却时有发生。据调研反映,…...

WorldArena榜单第一名Pelican-Unify 1.0:迈向具身智能统一范式的新里程碑
北京人形机器人创新中心团队发布首个统一理解、推理、想象与行动的具身基础模型 2026年5月 | 技术解读 图1 Pelican-Unify 1.0 统一具身智能模型概览:理解、推理、想象与行动的闭环融合 一、具身智能的范式演进:从模块化到统一化 具身智能(…...
2期)
C语言学习笔记(自用)2期
一、数据类型和变量C语言提供了丰富的数据类型来描述生活中的数据这些各式各样的数据类型,是程序向电脑申请内存来存储变量的指令数据类型分为整数类型,字符类型,浮点类型类型就是相似数据有的共同特征,编译器只有知道了类型以后&…...

3个关键策略:安全使用ViVeTool-GUI控制Windows隐藏功能
3个关键策略:安全使用ViVeTool-GUI控制Windows隐藏功能 【免费下载链接】ViVeTool-GUI Windows Feature Control GUI based on ViVe / ViVeTool 项目地址: https://gitcode.com/gh_mirrors/vi/ViVeTool-GUI ViVeTool-GUI是一款基于ViVe/ViVeTool的Windows功能…...

VideoDownloadHelper:打破网页视频下载壁垒的智能解决方案
VideoDownloadHelper:打破网页视频下载壁垒的智能解决方案 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 你是否曾遇到过这样的困…...

EGO-Planner-v2:零配置开启无人机集群仿真新体验
EGO-Planner-v2:零配置开启无人机集群仿真新体验 【免费下载链接】EGO-Planner-v2 Swarm Playground, the codebase of the paper "Swarm of micro flying robots in the wild" 项目地址: https://gitcode.com/gh_mirrors/eg/EGO-Planner-v2 想要快…...

BE-ToF技术:突破远距离深度成像的创新方案
1. BE-ToF技术概述:突破远距离深度成像的瓶颈深度感知技术在现代计算机视觉系统中扮演着越来越重要的角色,特别是在自动驾驶、机器人导航和三维重建等领域。时间飞行(Time-of-Flight, ToF)成像作为深度感知的主流技术之一,其性能直接决定了这…...